
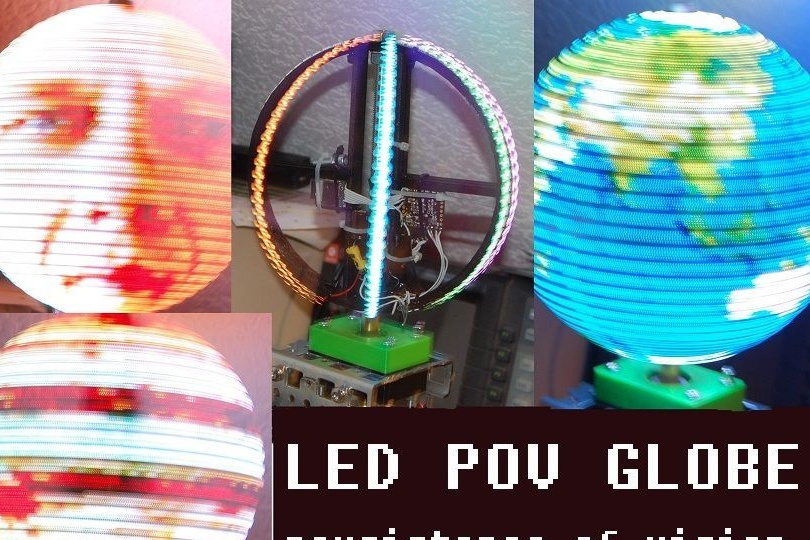
Denna handledning handlar om hur man bygger ett POV-klot med mindre. elektronisk komponenter än andra liknande enheter. Genom att använda RGB-lysdioder med en integrerad APA102-styrenhet. Detta sparar lödning av många trådar. Du kan läsa mer om dem. Dessa lysdioder behöver inte en extra drivrutin. De är anslutna direkt till mikrokontrollern på två sätt. Detta gör att du kan växla lysdioder mycket snabbt. För att få en stabil bild kommer SPI-synkronisering med en frekvens på 10 MHz. Ett annat plus med denna design är användningen av ett flash-kort, som lagrar bilden i BMP-format.
1 Material som krävs

För jordens axel behöver du:

1. Fäst med M8-tråd och en längd på 250 mm
2. Mutter M8
3. Mässingshylsa 10 mm och 100 mm lång
4. Plastbrickor 8 mm 2 delar (STL-filer ingår)
5. koppling för dem som kommer att använda stegmotorn NEMA 17
För att driva LED-ringen på axeln behöver du
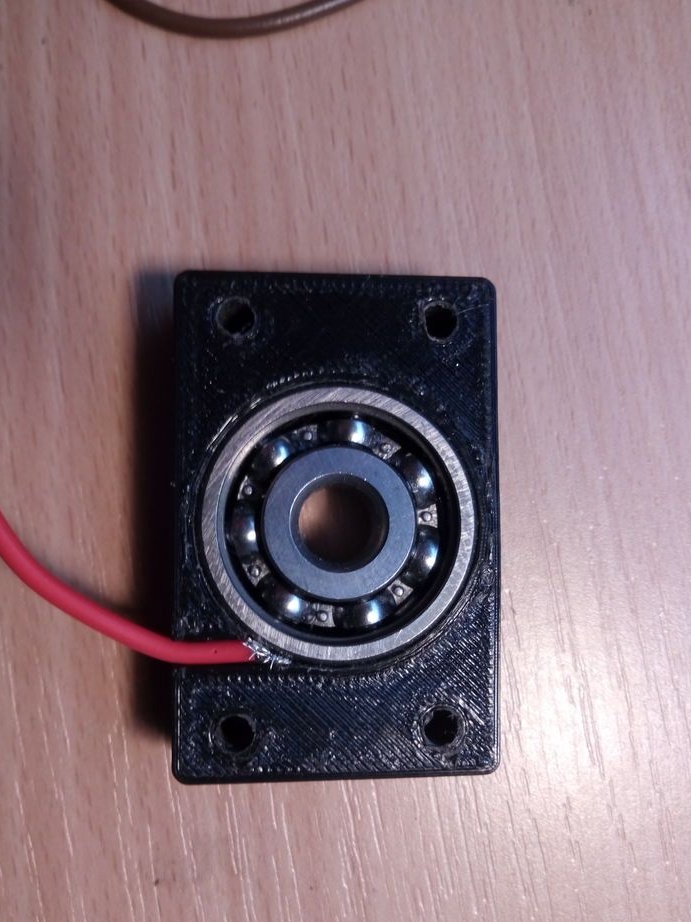
1. kullager 6300 (10x35x11)
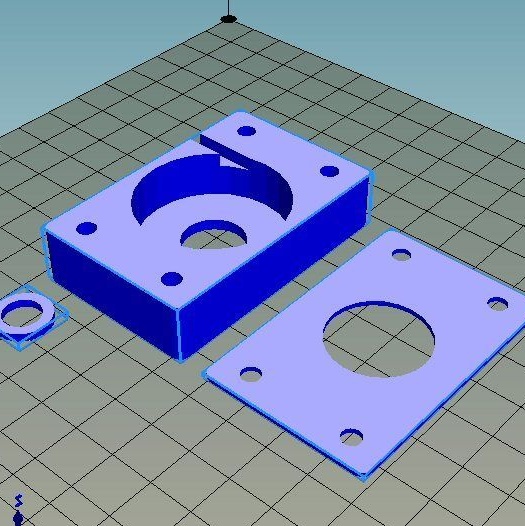
2. två konsoler för lager. Tryckt på en 3d-skrivare eller gjord av trä.
3. Fyra M4x40 bultar med muttrar
4. Tips om ledningar 2 st 8mm
5. med en axeldiameter på 5 mm
6. 4 bultar M4 för motormontering
7. kanske en fan för det.
Alternativt kan du använda vilken motor som helst med rätt vridmoment och varvtalsreglering. Motorn som används i denna konstruktion har ett maximalt vridmoment vid en ström på 50A, men den maximala strömförbrukningen under drift är endast 18A.
Använd för att kontrollera servomotordrivrutinen
1.
2. två knappar
Strömförsörjning 12V för motor och 5V för lysdioder. Som strömförsörjning kan du använda den gamla enheten från datorn. Du kan köpa en 12v / 5A strömförsörjning och ansluta till den
För LED-ringen behöver du:
1.664 lysdioder 2 remsor med 32 stycken
2. Kondensator 1000 uF 10V
3. Hallsensor och magnet
4. Uppdragsmotståndet 1k, 10k
5. Ringen måste skrivas ut på en 3D-skrivare eller använda en bit PVC-rör
6. Plastbindningar (100 mm)
7. Ett bra lim som fastnar ihop och inte flyger isär vid 2500 rpm
Du behöver också en Parallax Propeller Microcontroller. Eller så kan du använda en annan modellen controller, men tar dessutom en avgift för. Denna regulator är programmerad och blinkad så enkel som Arduino. Du behöver en USB-TTL-adapter för att programmera båda styrenheterna.
Housing.
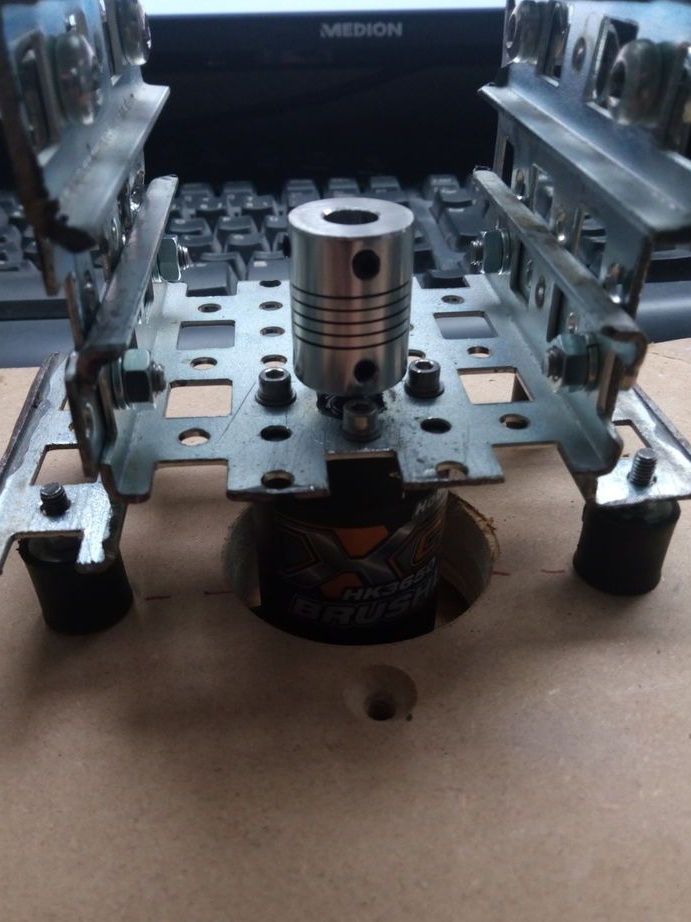
Bostäder för hemlagad Du kan ta tillräckligt hårt. Det viktigaste är att du kan säkra fast motorn och lager.
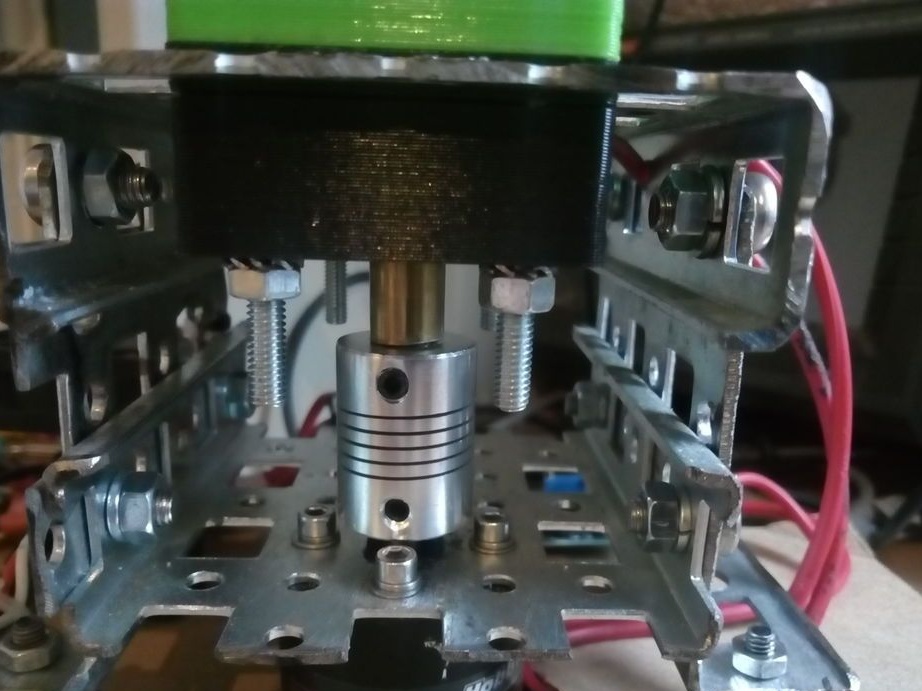
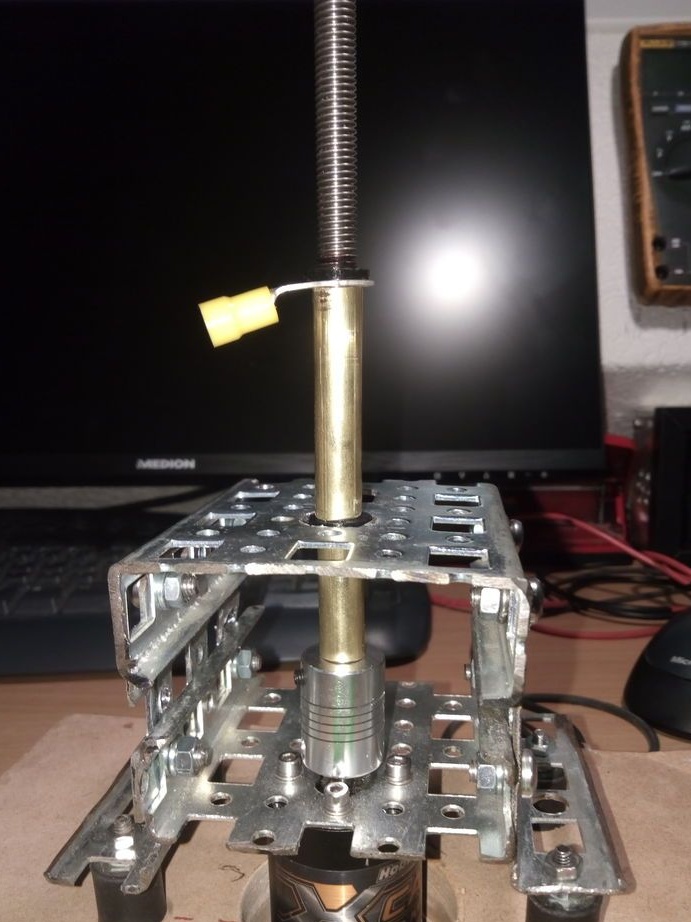
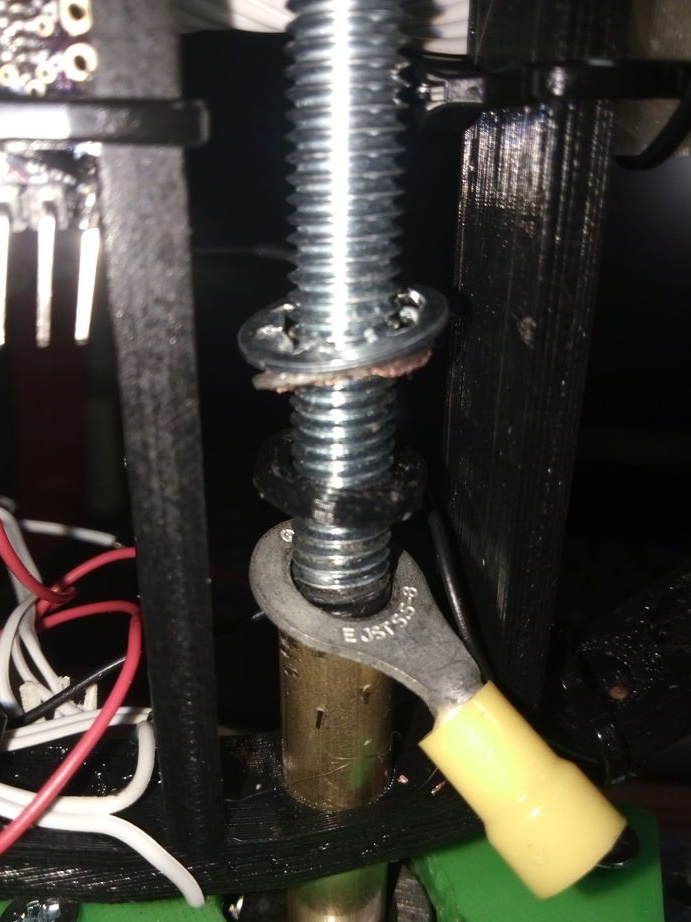
En 250 mm lång skruv används för drivaxeln.Längden på mässingsbussningarna är 50 och 30 mm. Beror på ringstorlek och axellängd. Den övre och längre hylsan måste isoleras från bultarna, eftersom den används för att leverera plus ström till lysdioderna. För att göra detta, linda in elektrisk tejp på en hårnål eller använda värmekrymp, två plastbrickor behövs också. Hylsan måste borras till 8,5-9 mm annars passar den inte. Den andra hylsan tillsammans med stången bildar en negativ kontakt.
Minuseffekten placeras i ett speciellt spår och pressas mot lagret i konsolen, som kan skrivas ut på en skrivare. STL-fil för konsol i arkivet.


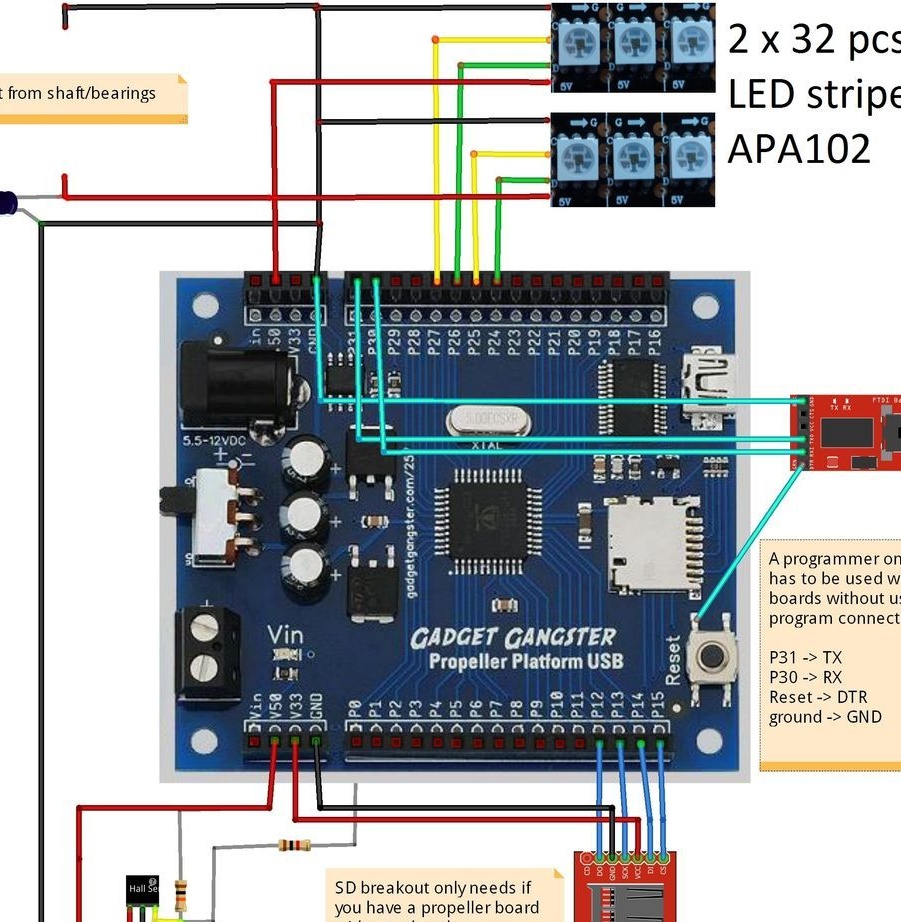
Nu måste du ansluta elmotorn, som visas i diagrammet.
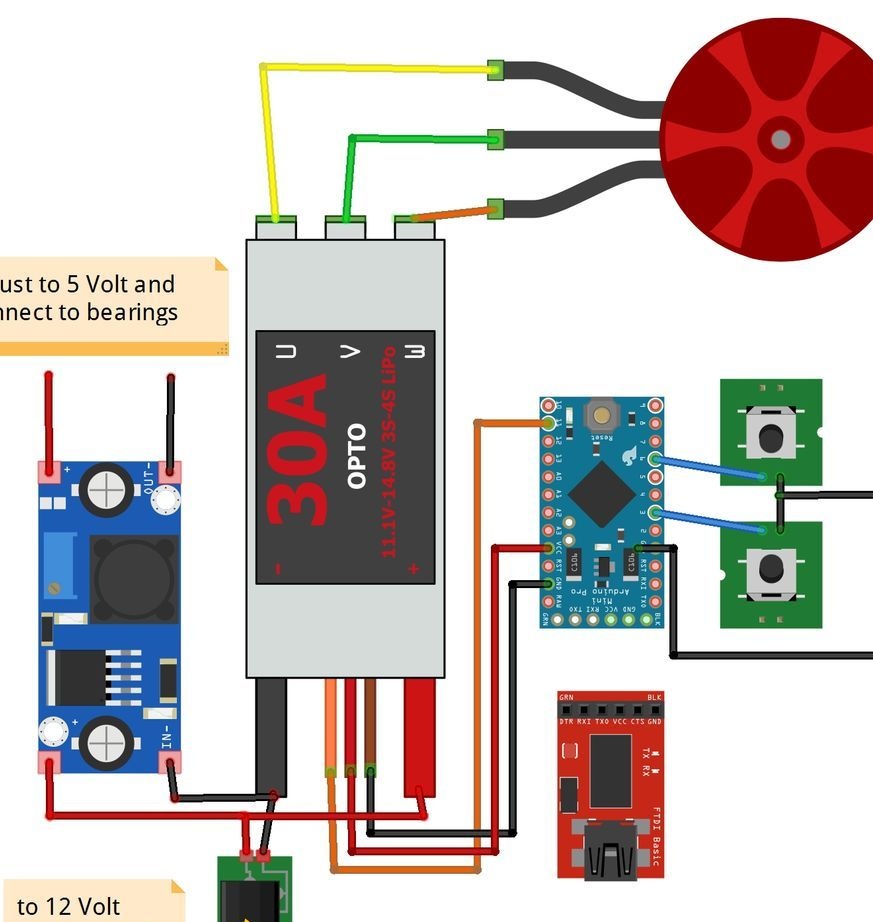
Två knappar på diagrammet används för att justera hastigheten. När du slår på strömmen kommer ESC att få ett värde på 500 μs. Tryck på en av knapparna för att slå på motorn. Skissen tar värdet "StartPos = 625". Senare, när du justerar hastigheten, kan detta värde ändras. Tryck på knappen i två sekunder så ska motorn stanna.
Montering av kärnstrukturen.
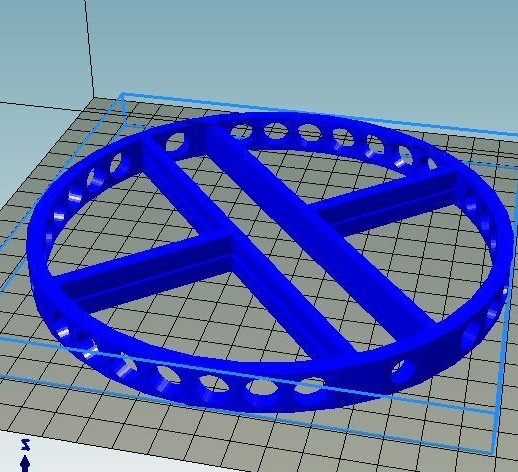

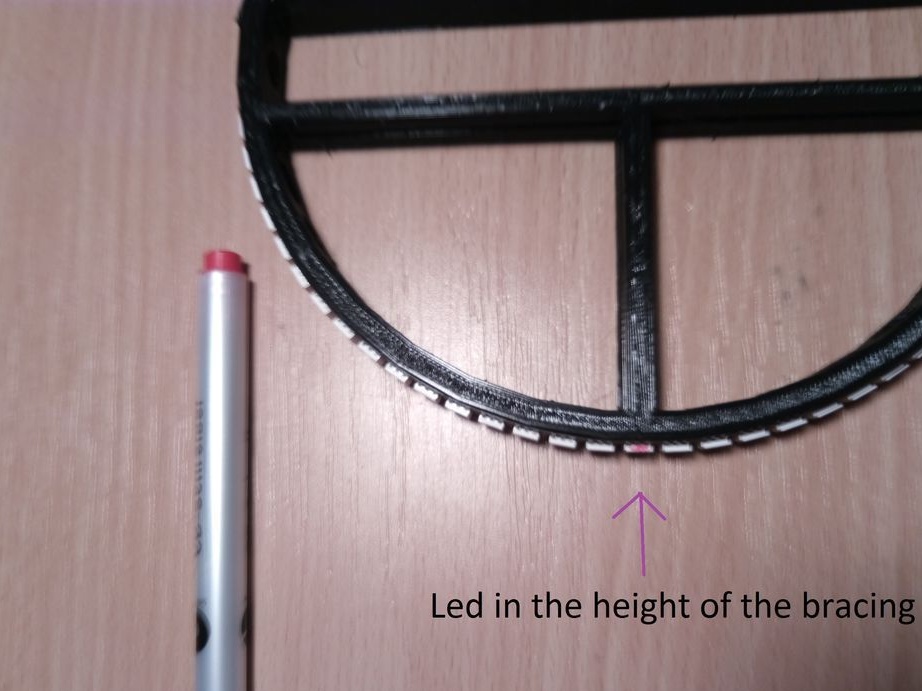
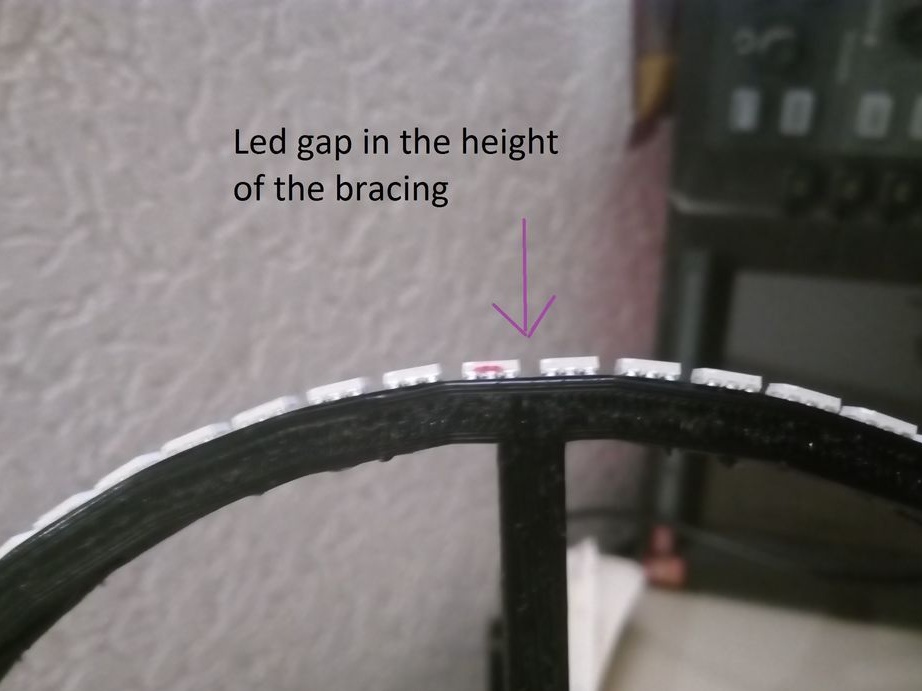


För att göra detta, skriv ut själva ringen från den bifogade filen. Författaren gjorde många hål i den för att minska vikten. Du kan använda en bit PVC-rör. Två remsor med 32 lysdioder skärs. Två remsor med lysdioder bildar jämna och udda linjer. Ordna tejpen så att lysdioderna på en remsa är belägna mellan lysdioderna på den andra, men på baksidan. När du har fäst bandet kan du ansluta LED-korten för kontrollkortet. Och då måste du balansera hela enheten.
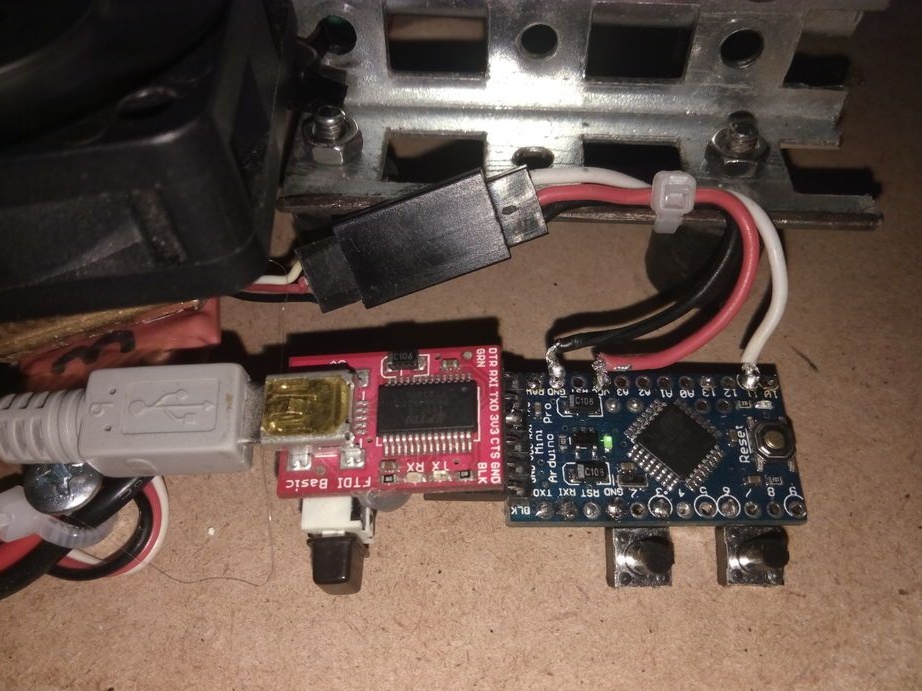
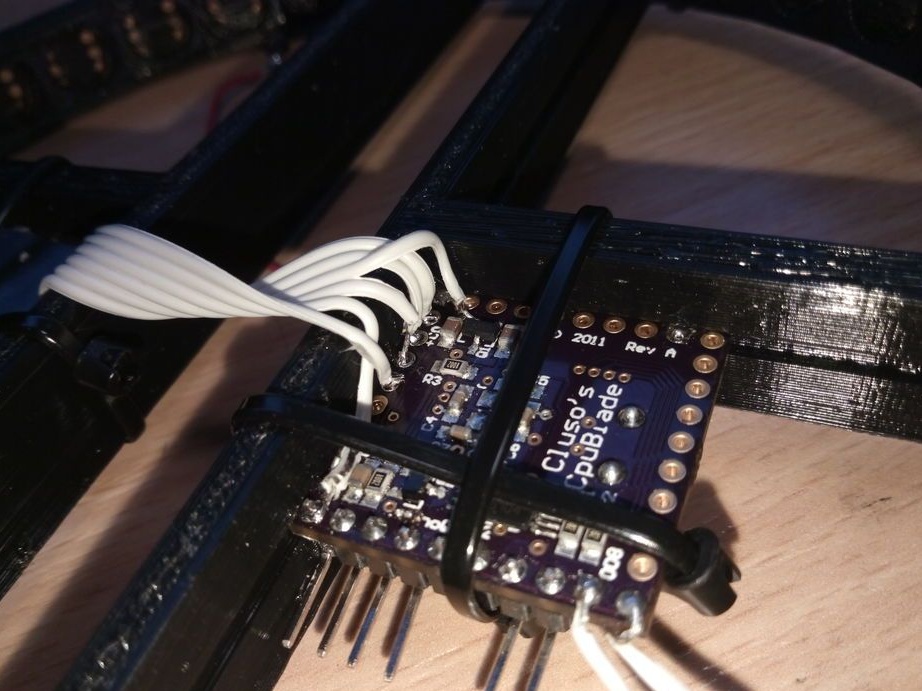
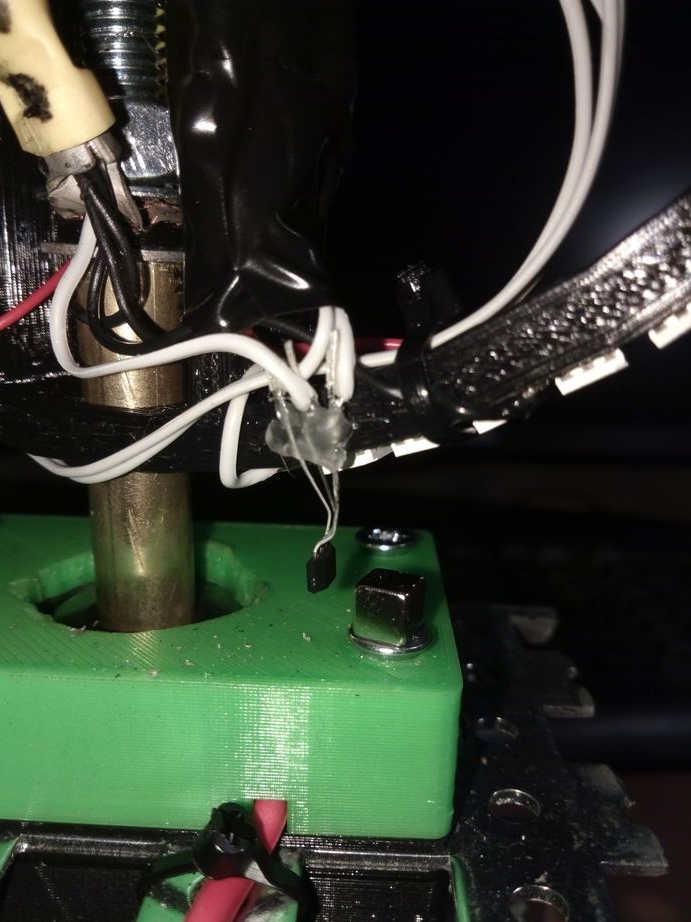
Följande bilder visar hur du ansluter alla enhetens komponenter till varandra. Fotot visar också den installerade hallsensorn med en magnet.
För att programmera Parallax Propeller Microcontroller behöver du
Anslut INTE din utrustning till en USB- eller seriell port förrän du har installerat programvaran. Mer information om hur du laddar upp firmware till Parallax finns
Författaren använder ett äldre och följaktligen mindre ekonomiskt, när det gäller energiförbrukning, MCU-kort eftersom han inte kan hitta nya bibliotek på de nya styrenheterna.
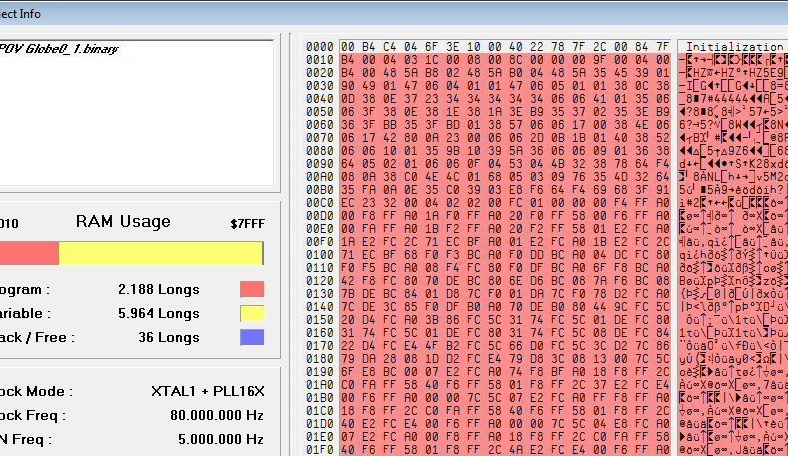
När du har samlat in och anslutit allt måste du programmera styrenheten. Författaren gör detta med hjälp. Filer med firmware i arkivet.
Nu kan du försöka starta enheten. Kopiera testbilden till SD-kortet från början och klistra in den i facket.
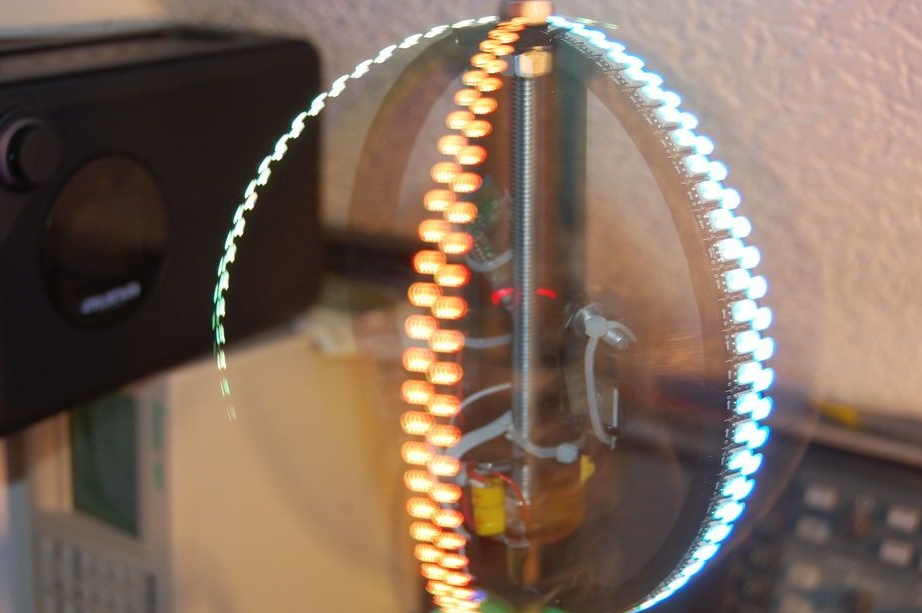
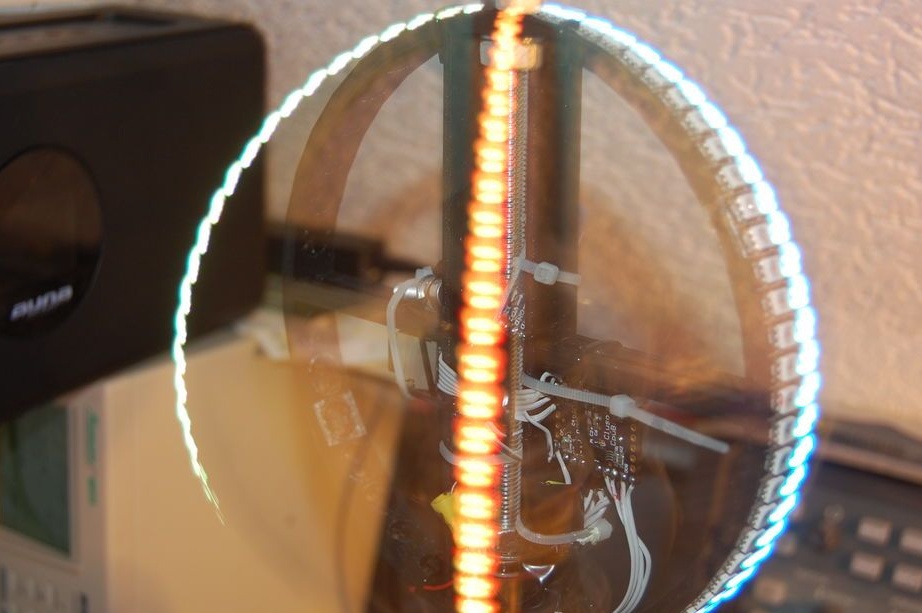
• Om du roterar ringen för hand bör lysdioderna blinka varje gång hallsensorn passerar magneten
• Slå på motorn. Öka hastigheten med knapparna, det är nödvändigt att se till att lysdioderna tänds som visas på två foton
• Anslut Arduino-terminalen till motorstyrenheten.
• Kom ihåg det visade värdet.
• Stoppa motorn
• Skriv det tidigare lagrade värdet till variabeln "startPos"skissa POV_MotorControl
• Programmera Arduino igen.
Nästa gång din motor startar omedelbart med rätt hastighet. Nu kan du "Fyll" på kartan vilken bild som helst. För att göra detta måste du ändra storlek på bilden med 120x64 pixlar, rotera bilden moturs 90 grader och spegla vertikalt. Minska bildens ljusstyrka eftersom lysdioderna är mycket ljusa. För att göra detta är det bättre att använda gammakorrigering med en koefficient på 0,45.
Spara bild som BPM 24 bit utan komprimering. Efter alla manipulationer kommer utdatafilen att vara storleken 23094 byte.



