
Hej till alla elektronikälskare. I den här artikeln kommer jag att berätta hur man gör en sökmotorrobot som reser längs en svart linje, som du kan rita som du vill. Jag är säker på att detta kit-kit kommer att bli en mycket intressant leksak för de som kommer att samla in det.
Jag drar inte länge, vi går direkt till tillverkning
Innan jag läser artikeln föreslår jag att titta på en video med en detaljerad monteringsprocessor för detta kit-kit, såväl som dess prestandakontroller.
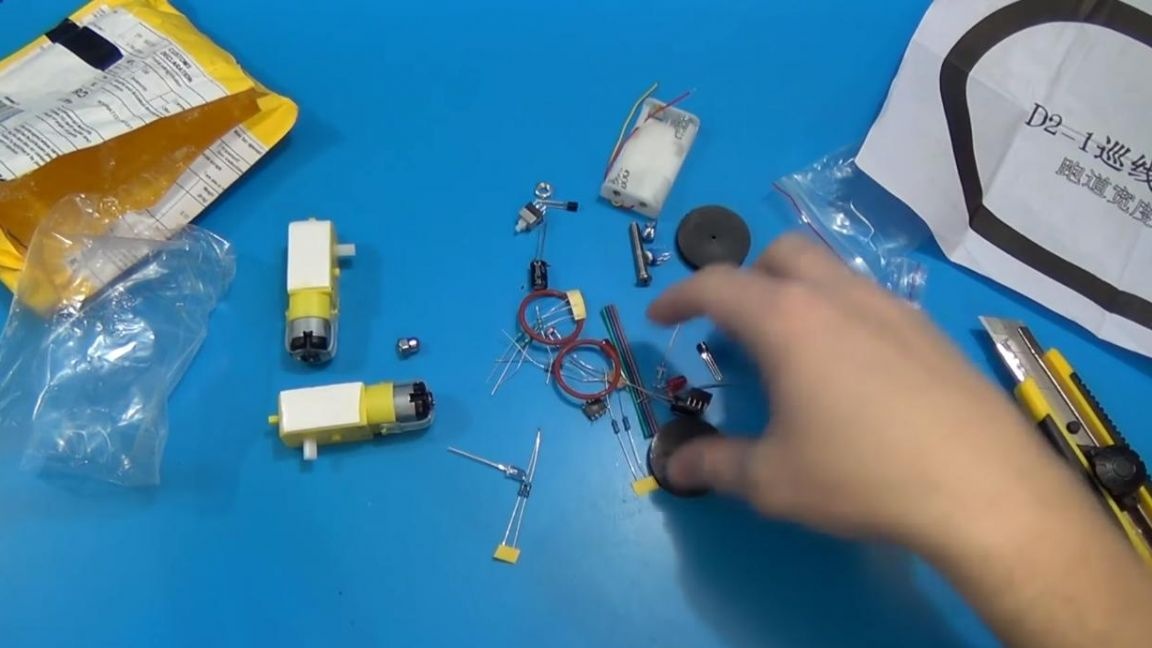
För att skapa en sökmotorrobot som kommer att färdas längs den svarta linjen gör det själv, du kommer att behöva:
* Kit
* Lödjärn, löd, flussmedel
* Sidoskärare
* Multimeter
* anpassning för lödning "tredje hand"
* Tång
* Phillips skruvmejsel
Första steget.
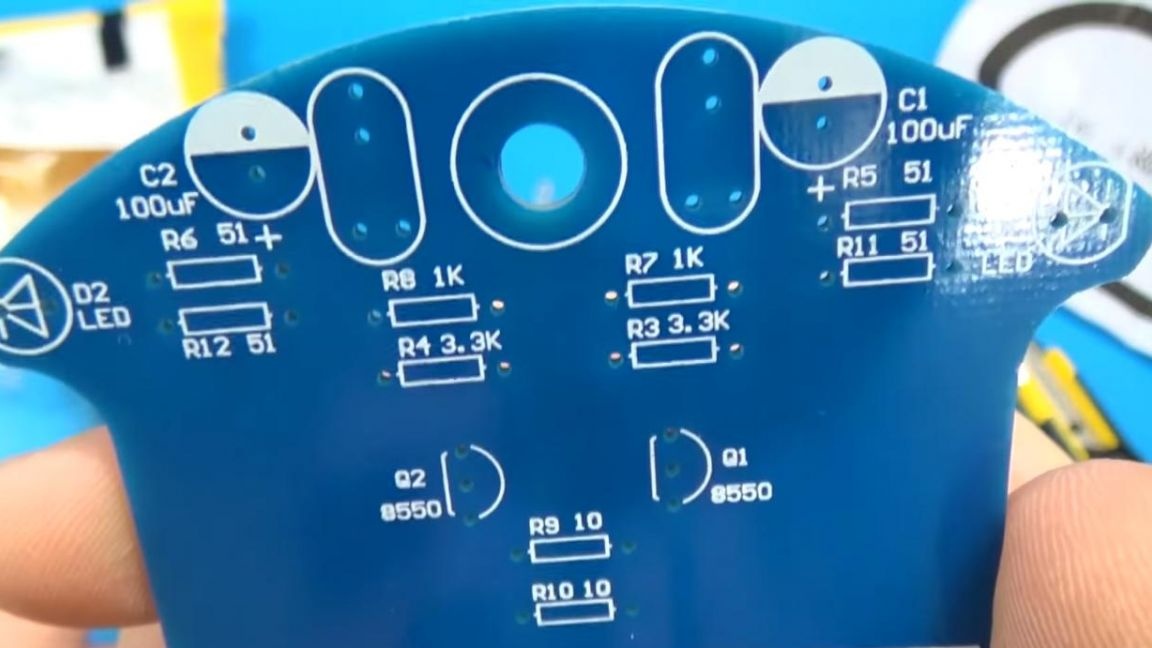
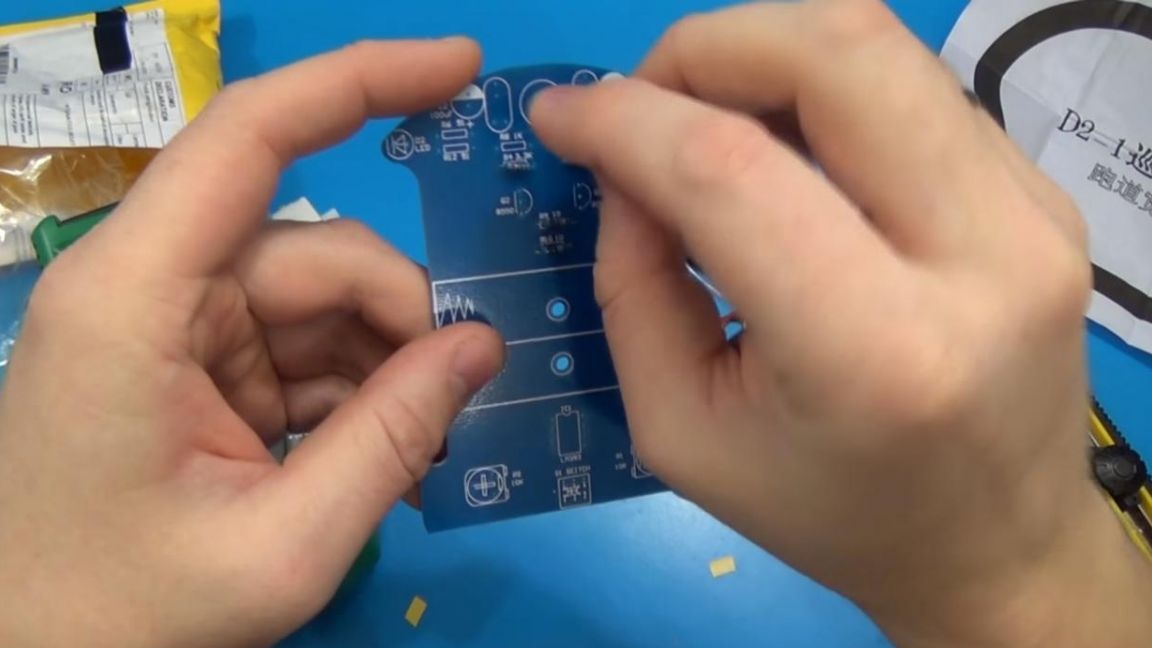
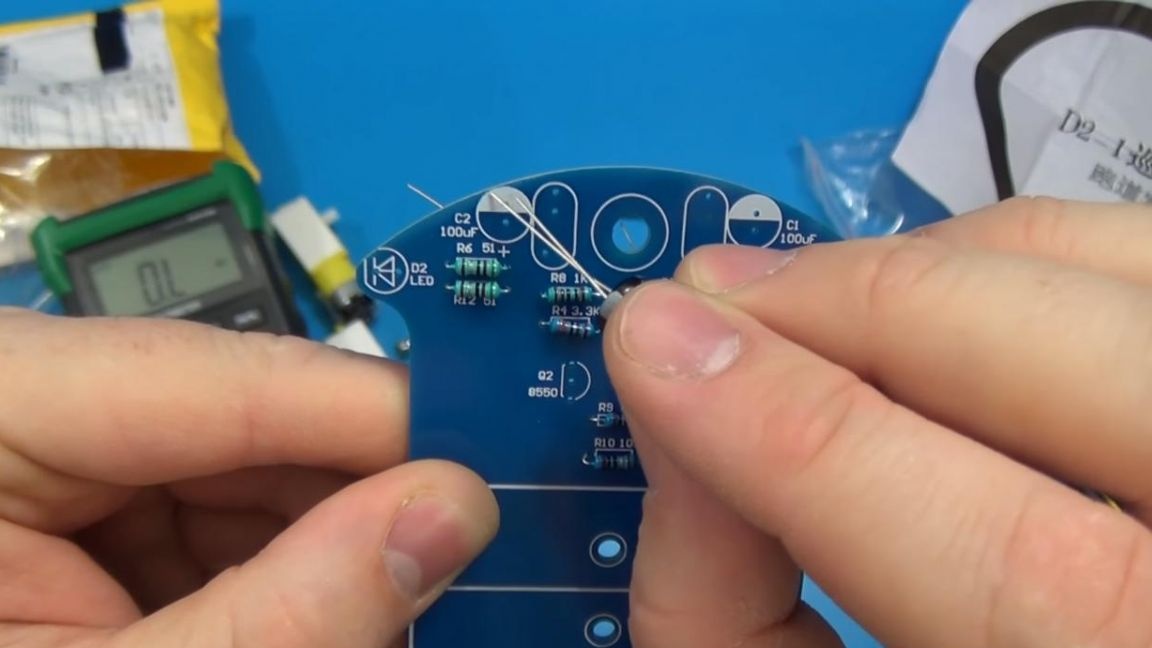
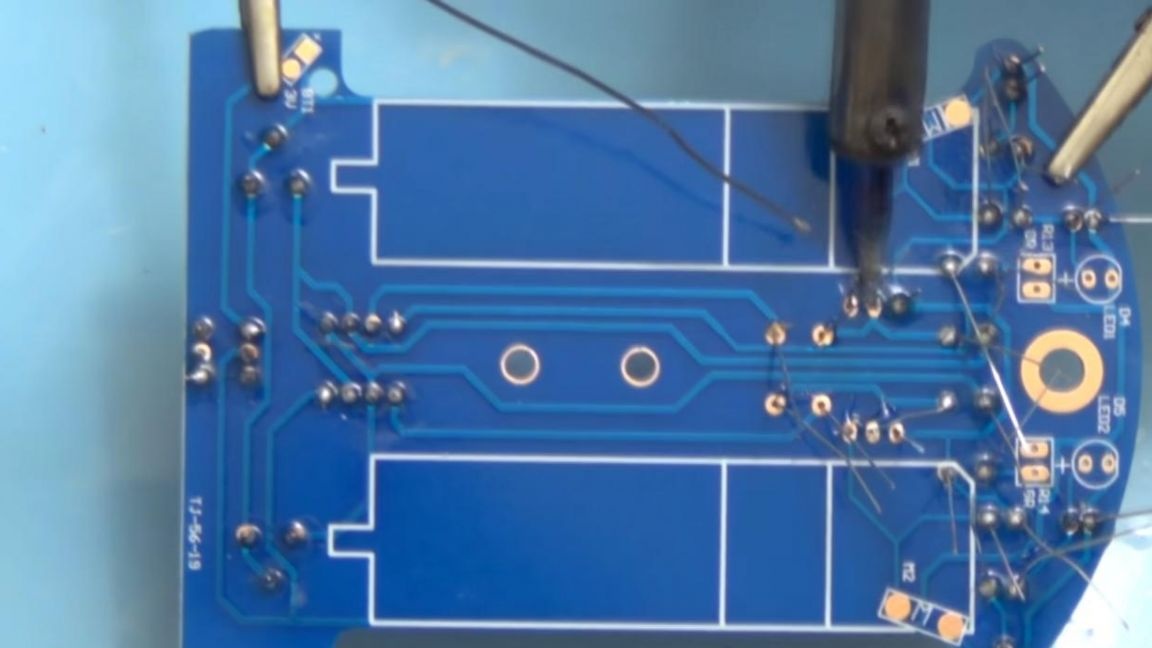
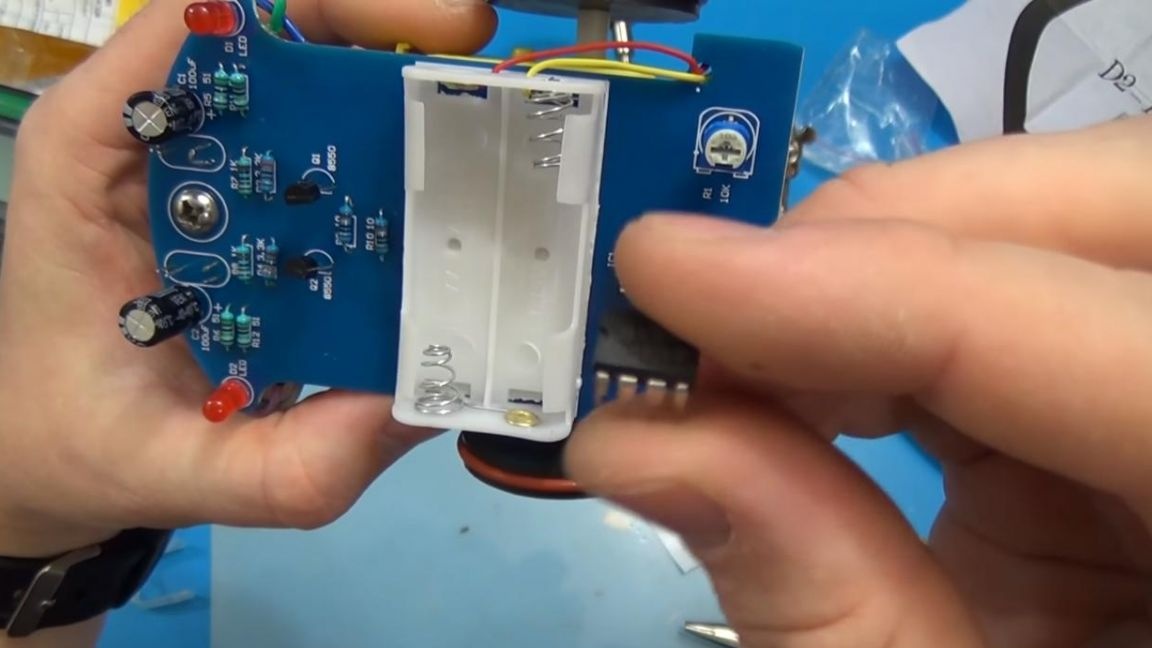
Först måste du placera alla komponenter på kortet, i satsen ingår både motstånd, kondensatorer och transistorer.
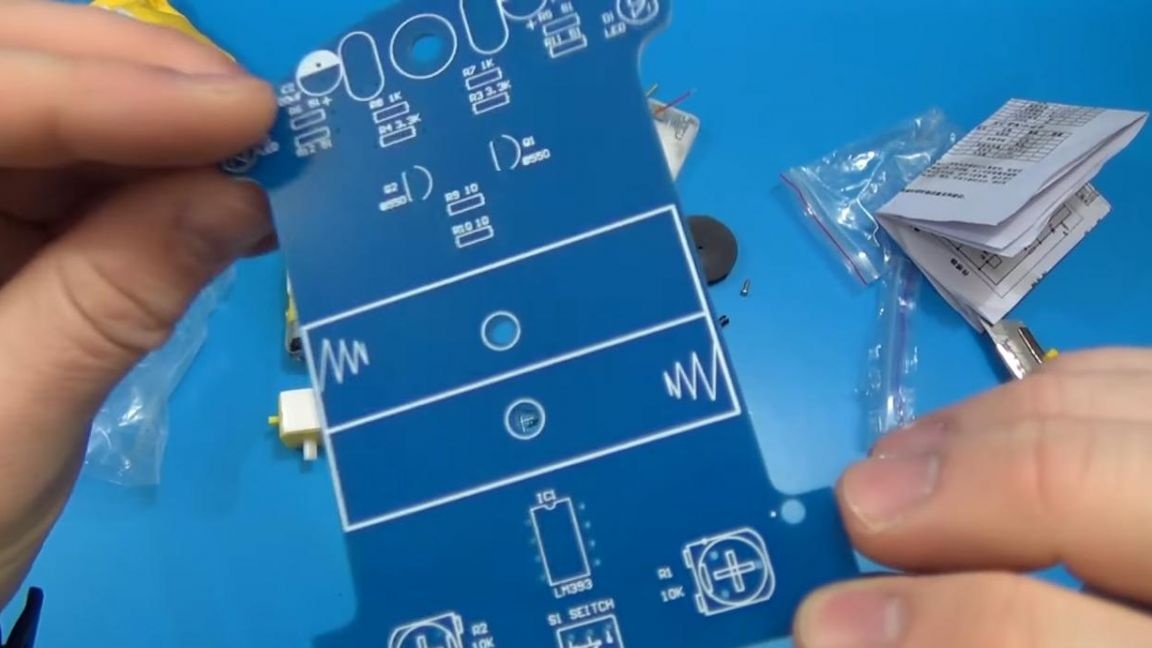
Först måste du installera motstånden på plats, vars nominella värde anges på kortet, medan motstånden själva är färgkodade, varigenom du kan bestämma motståndet för ett enda motstånd. Motstånd kan också mätas med en multimeter, den här metoden kommer att vara snabbare, men det betyder inte att det är ett måste. Vi ordnar motstånden på brädet enligt deras nominella värde, böjer anslutningarna något på baksidan, detta görs så att de inte faller ut vid lödning.

Steg två
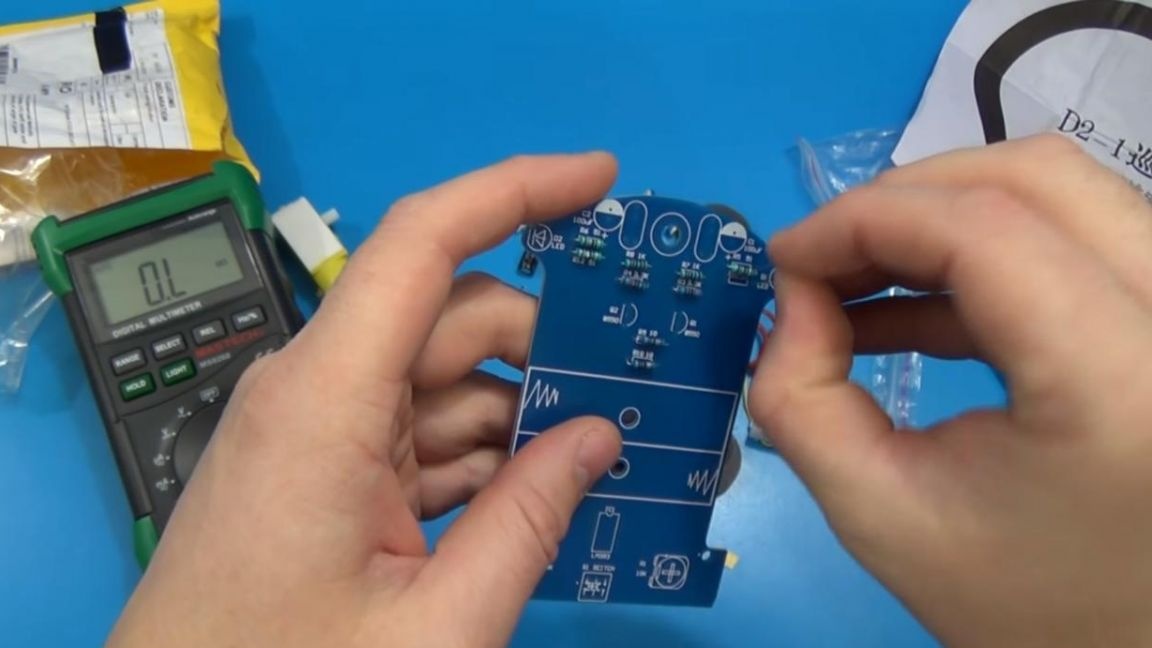
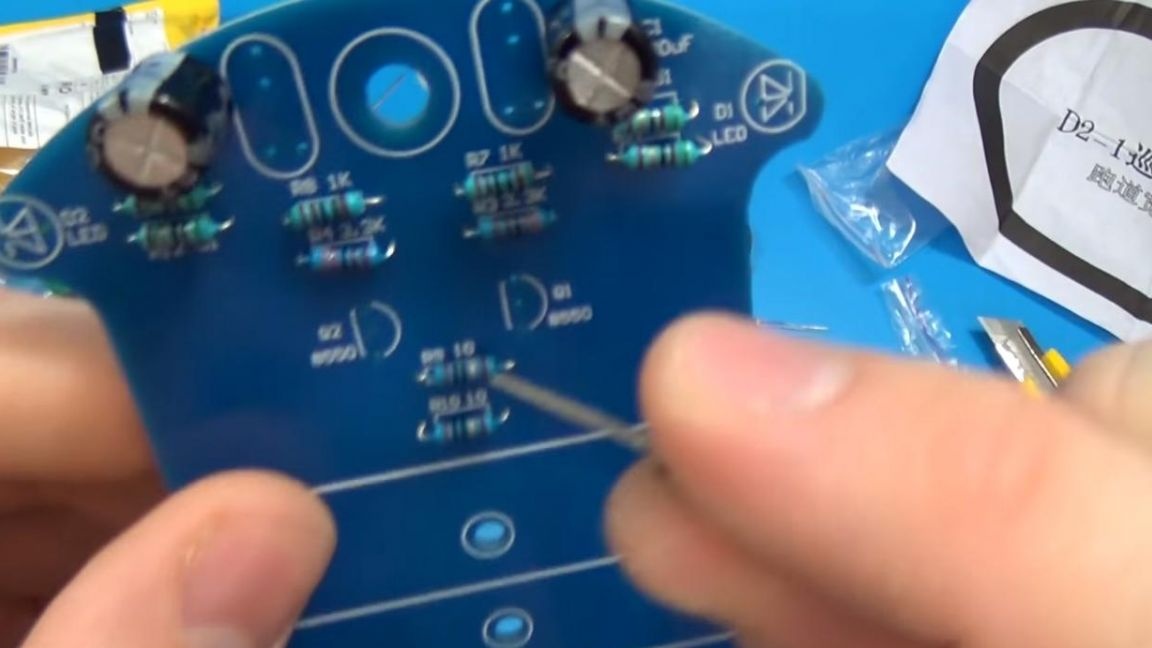
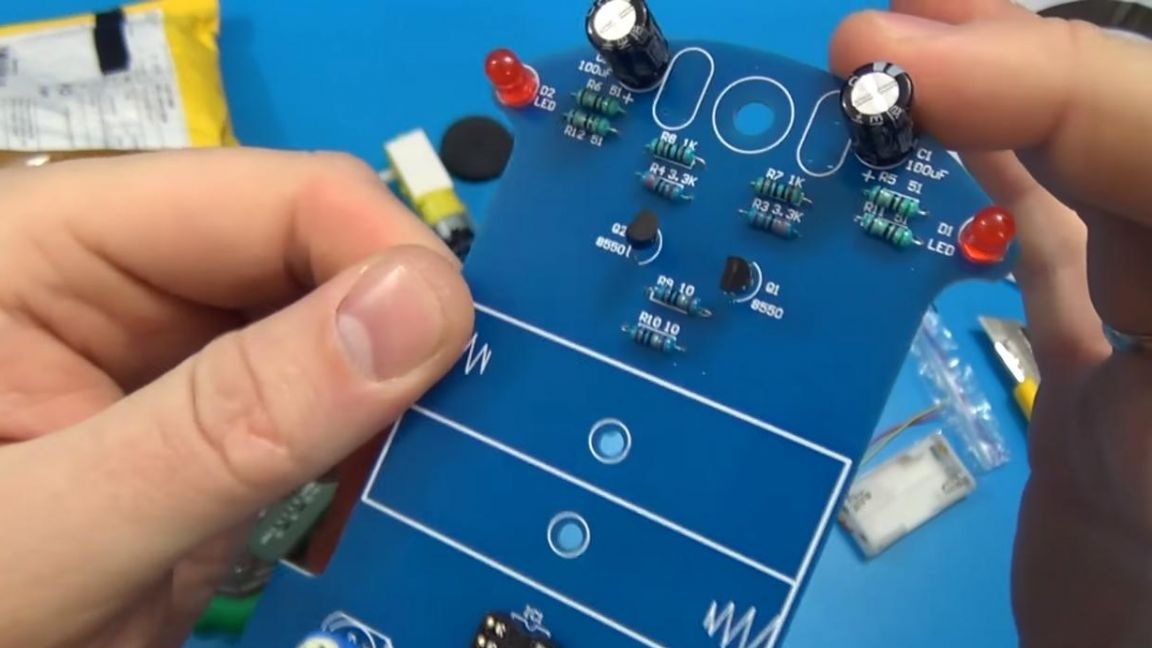
Motstånden är alla på plats, följt av kondensatorerna, till skillnad från tidigare komponenter har dessa polaritet. Kondensatorns minus indikeras på dess hölje med en vit remsa med en streck; på brädet indikeras minus med en fylld vit halvcirkel.
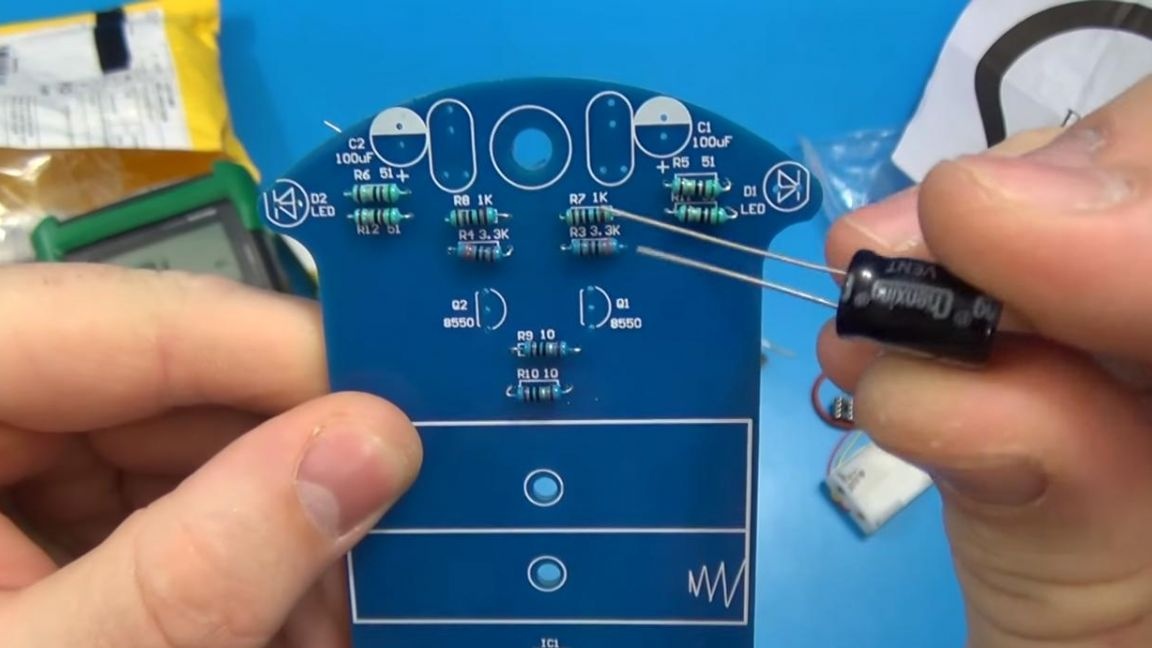
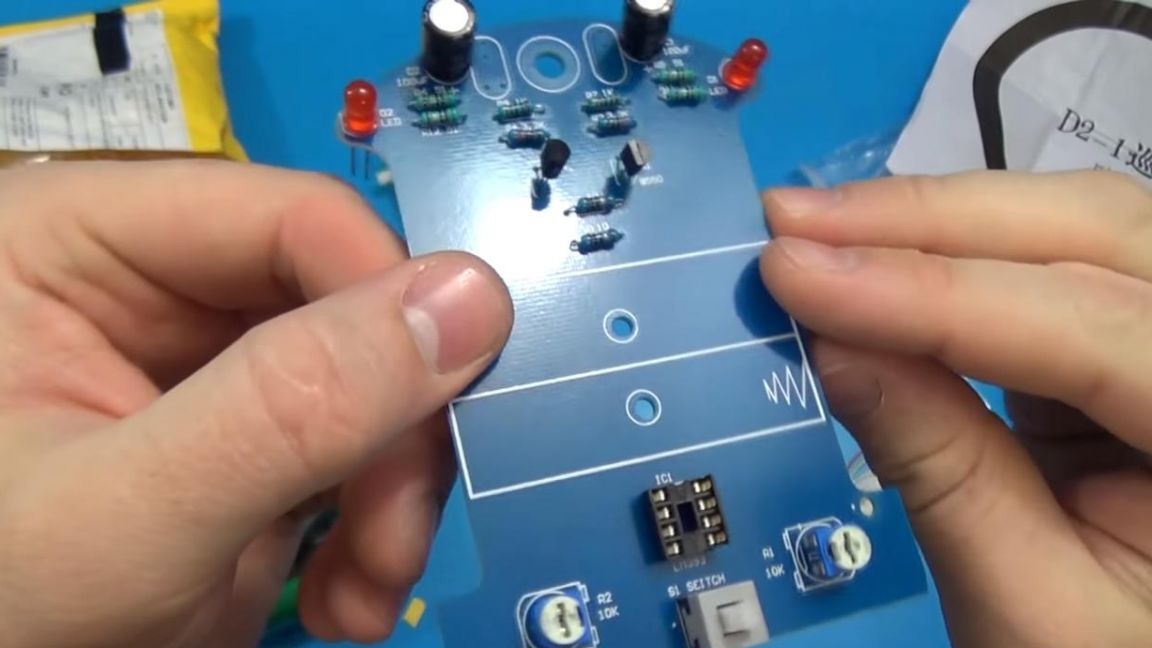
När kondensatorerna är på deras ställen vänder vi oss till transistorerna, de är desamma för oss, så vi kan inte blanda med varandra. För att placera dem ordentligt på brädet måste du kombinera den plana delen av transistorn med en streck på brädet.
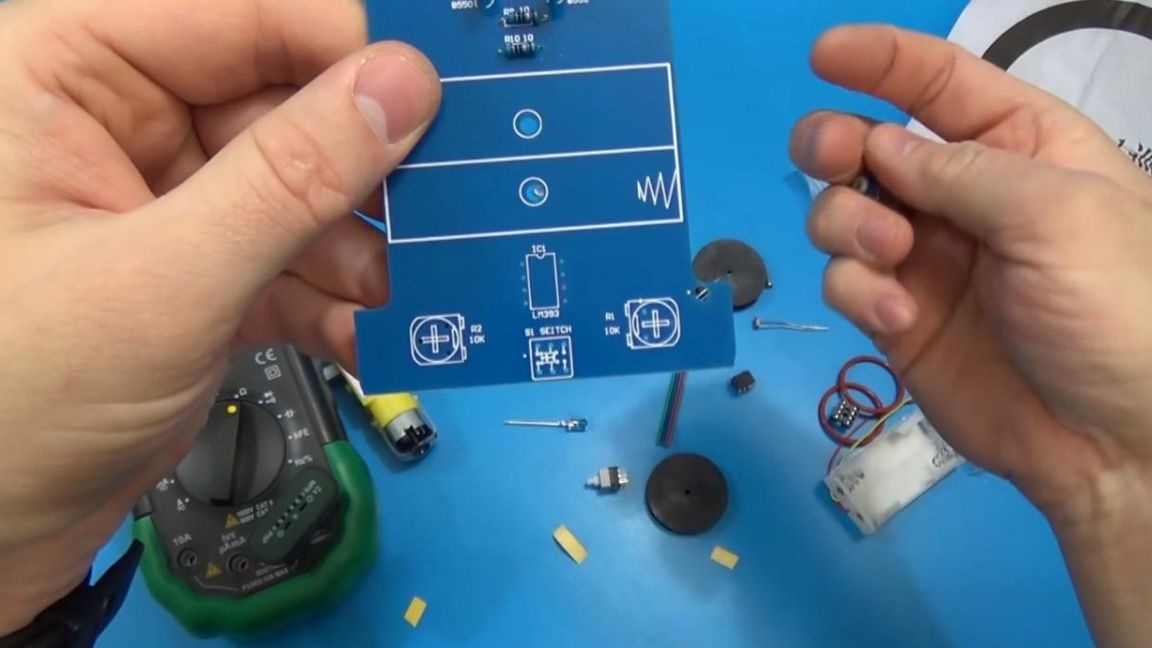
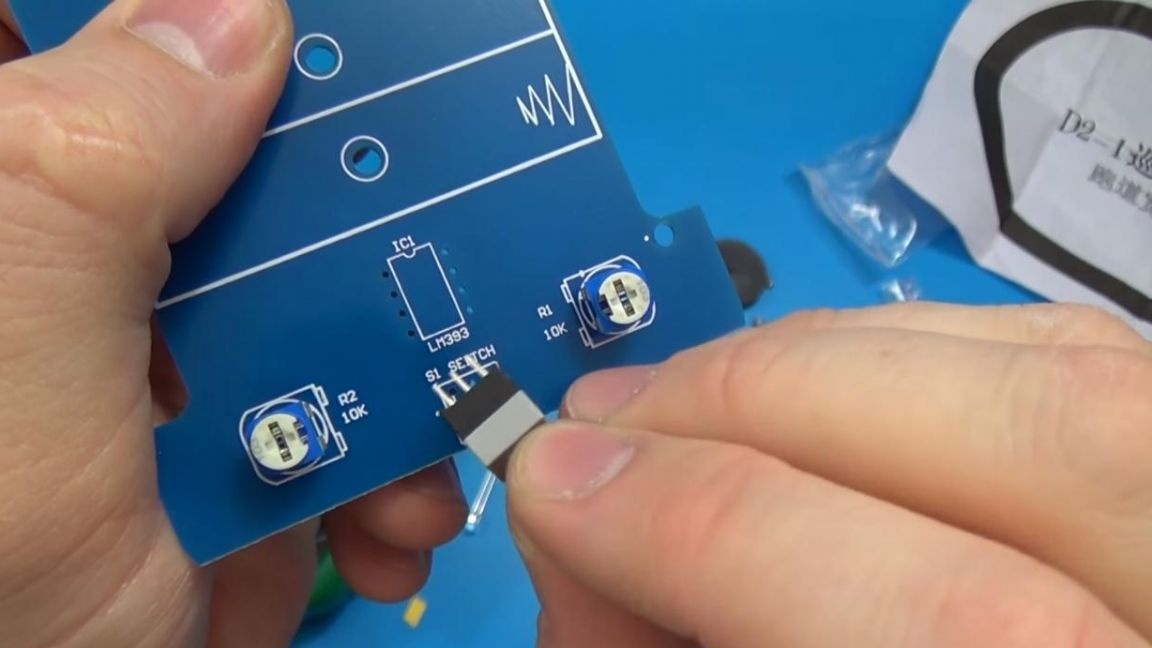
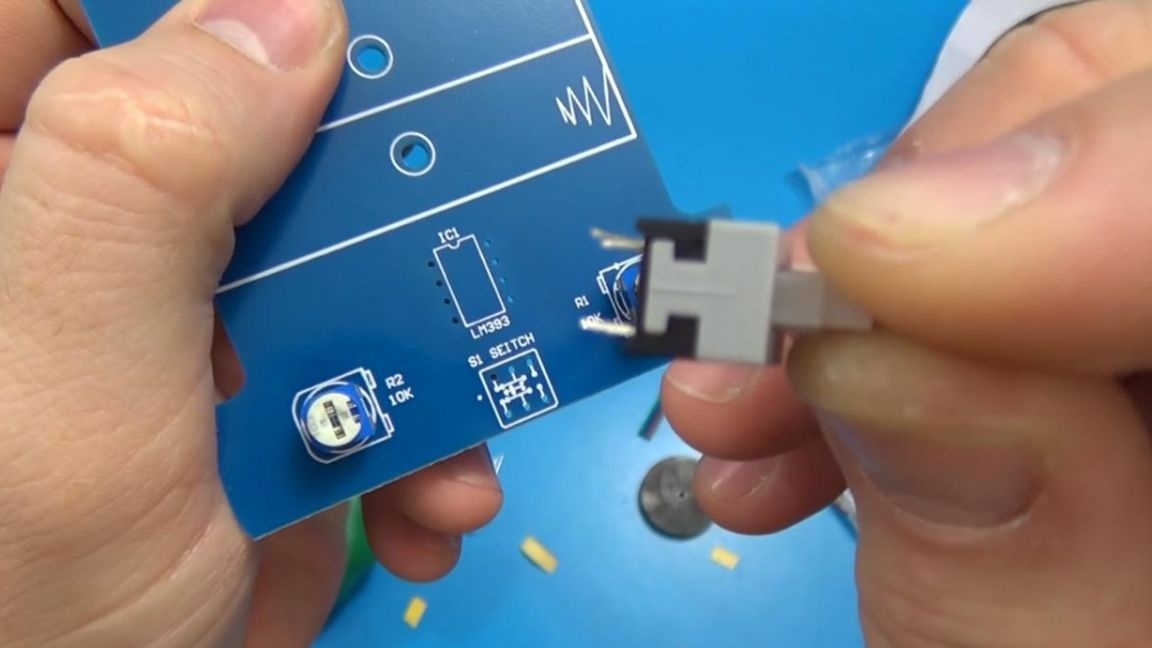
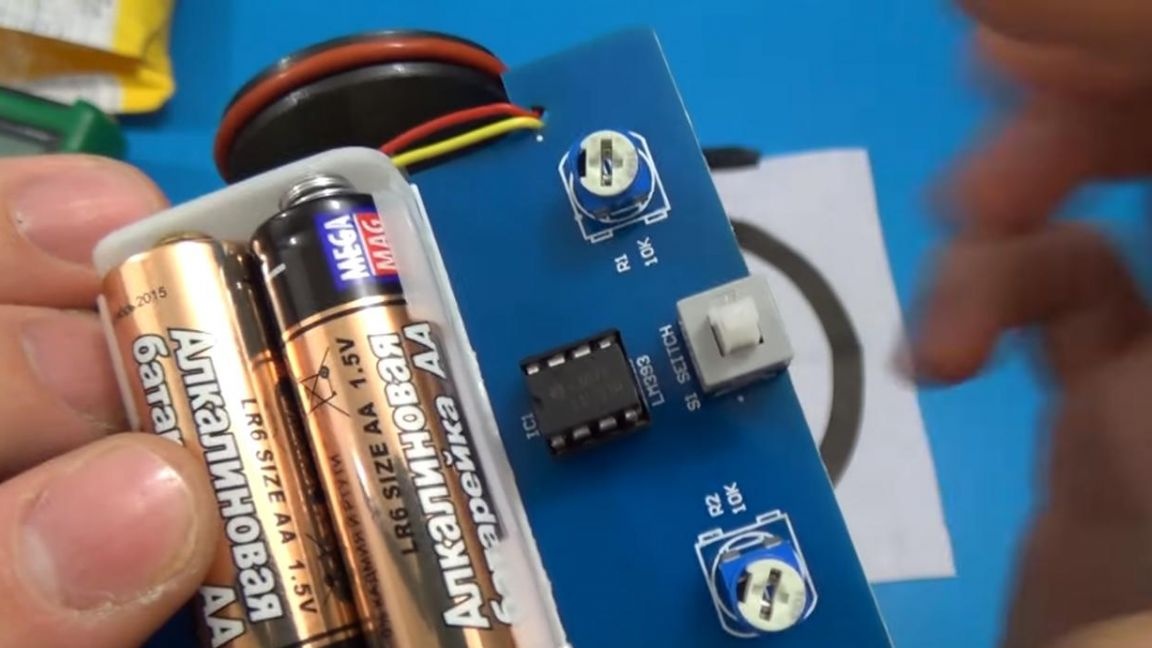
Sedan installerar vi två inställningsmotstånd, i anslutning till platsen för terminalerna kommer det inte att fungera för att sätta dem felaktigt, vilket är bra. Vi placerar också strömbrytaren, den är på-av, det vill säga att den kan vara i på- eller av-läge, dess korrekta placering motsvarar sammanfallet av remsans läge på knappen själv med en punkt på brädet.
Steg tre
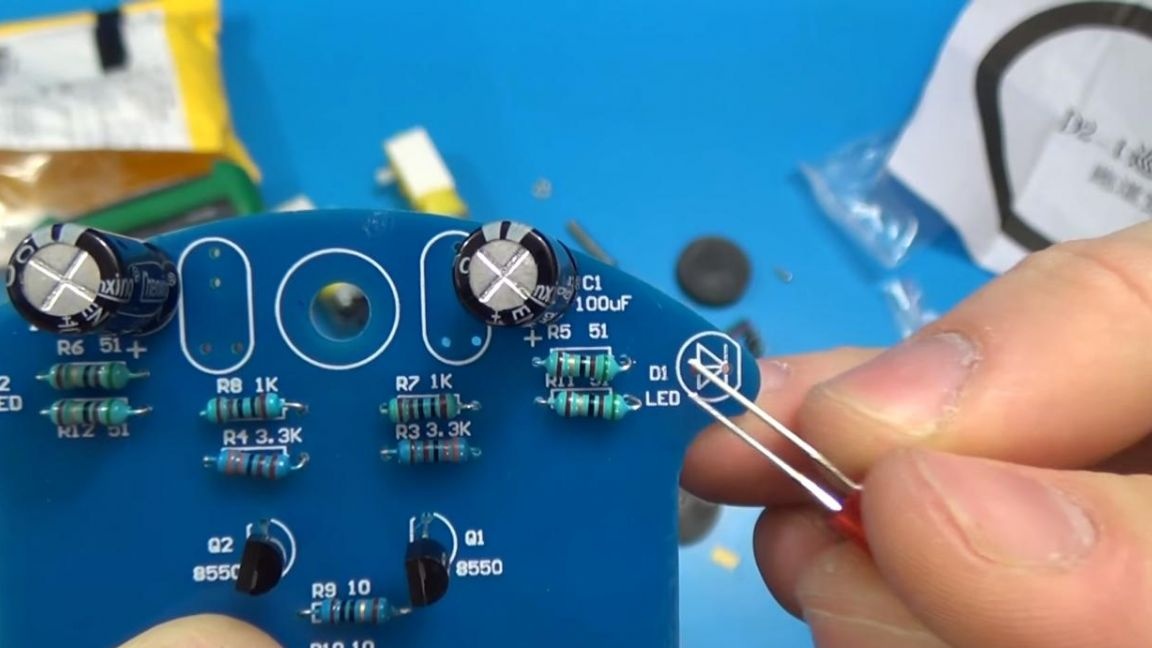
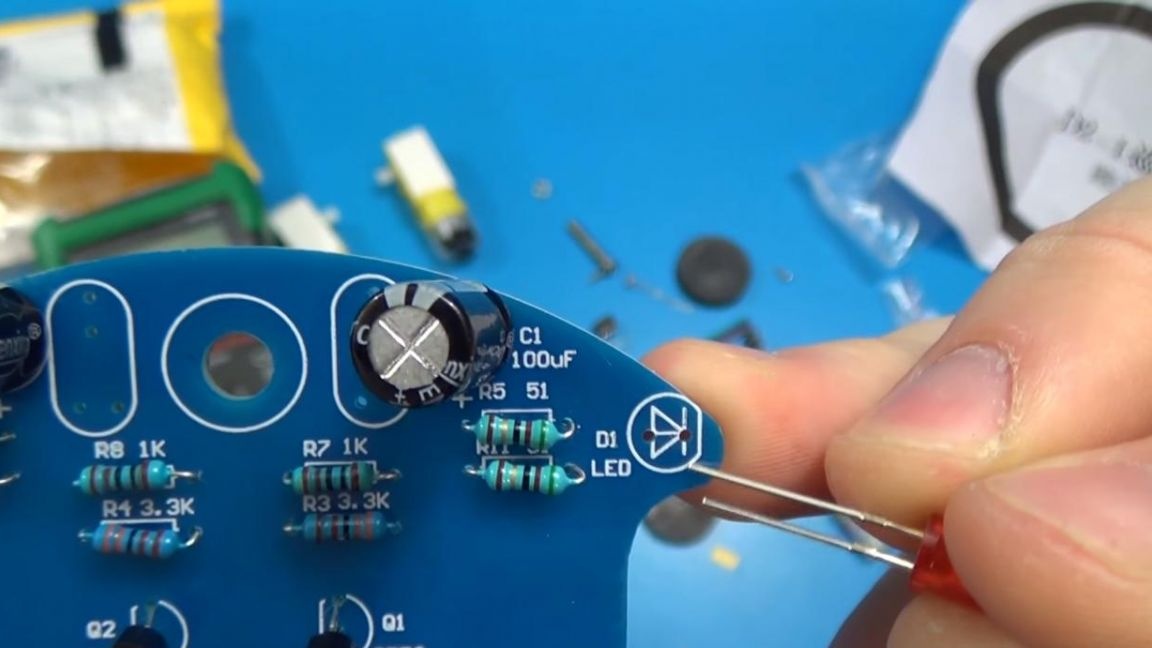
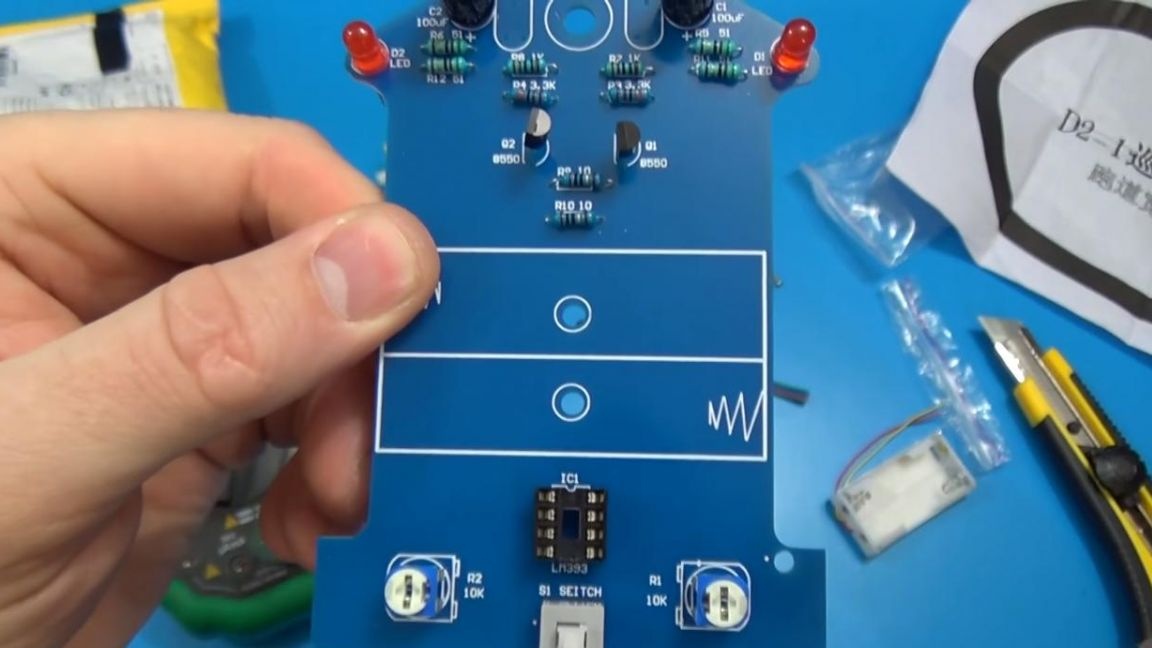
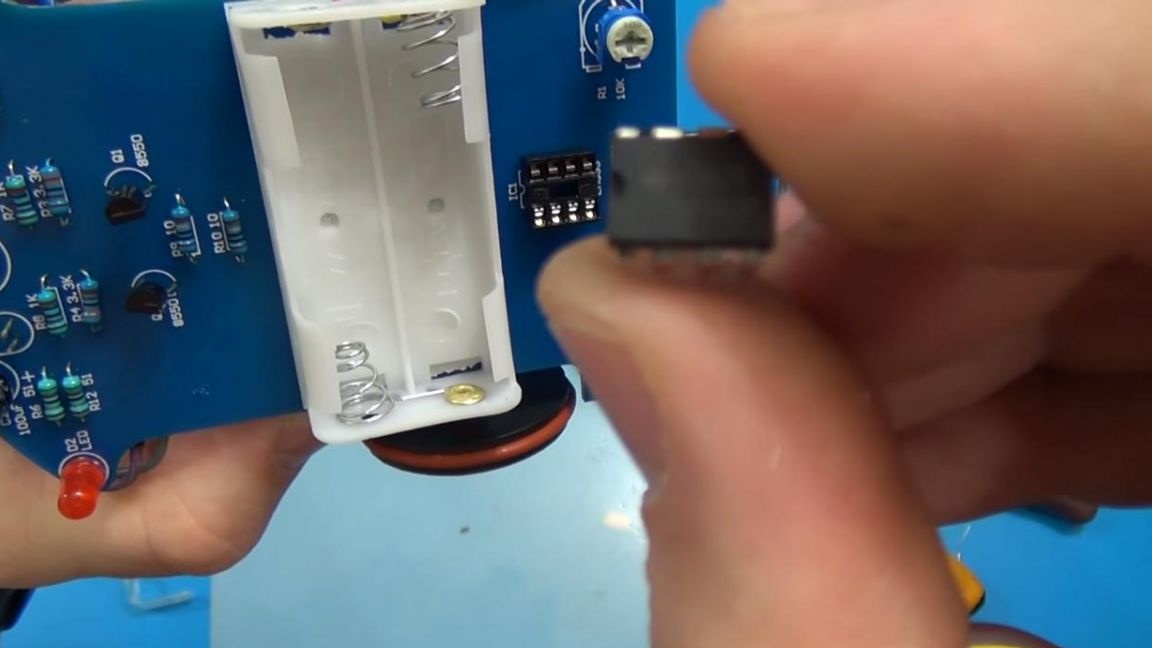
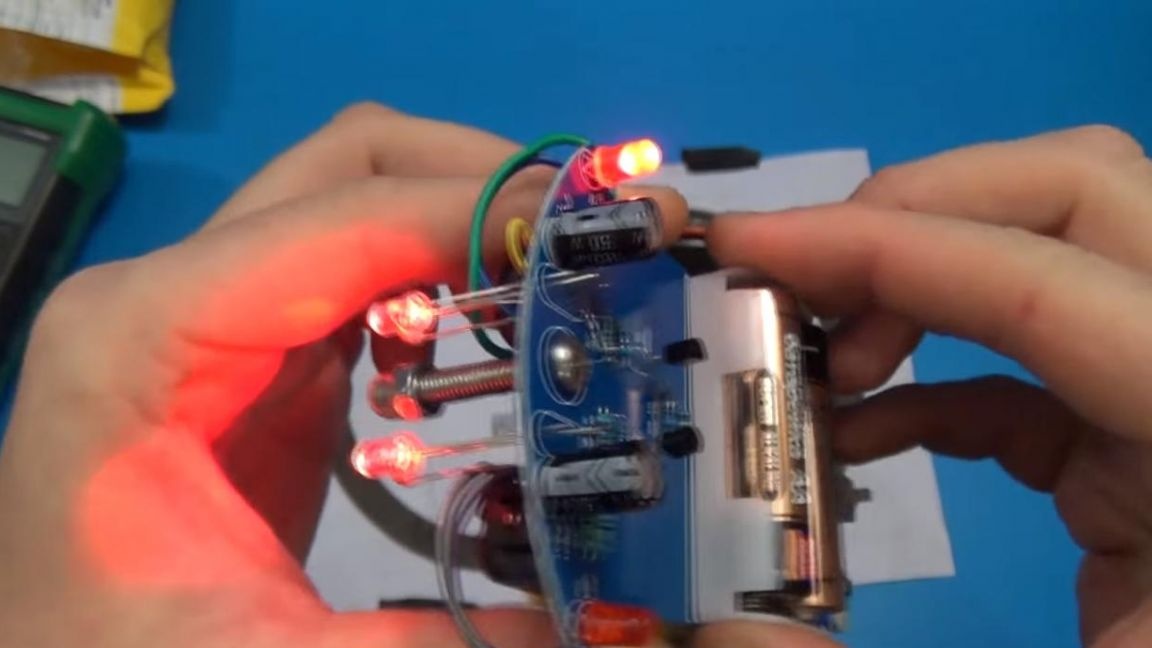
Dags att hantera lysdioder, det finns fyra av dem i satsen, två röda och två vita. På tavlan indikeras plusen med en triangel, på lysdioden är det en lång utgång, med minus är allt klart. Vi placerar de röda lysdioderna ovanpå, de är analoger till "blinkers".Det finns en separat plats för mikrokretsen, vi sätter i kontakten där, så att det kommer att bli mycket lättare att byta ut, men kontakterna överhettas inte vid lödning.

Steg fyra
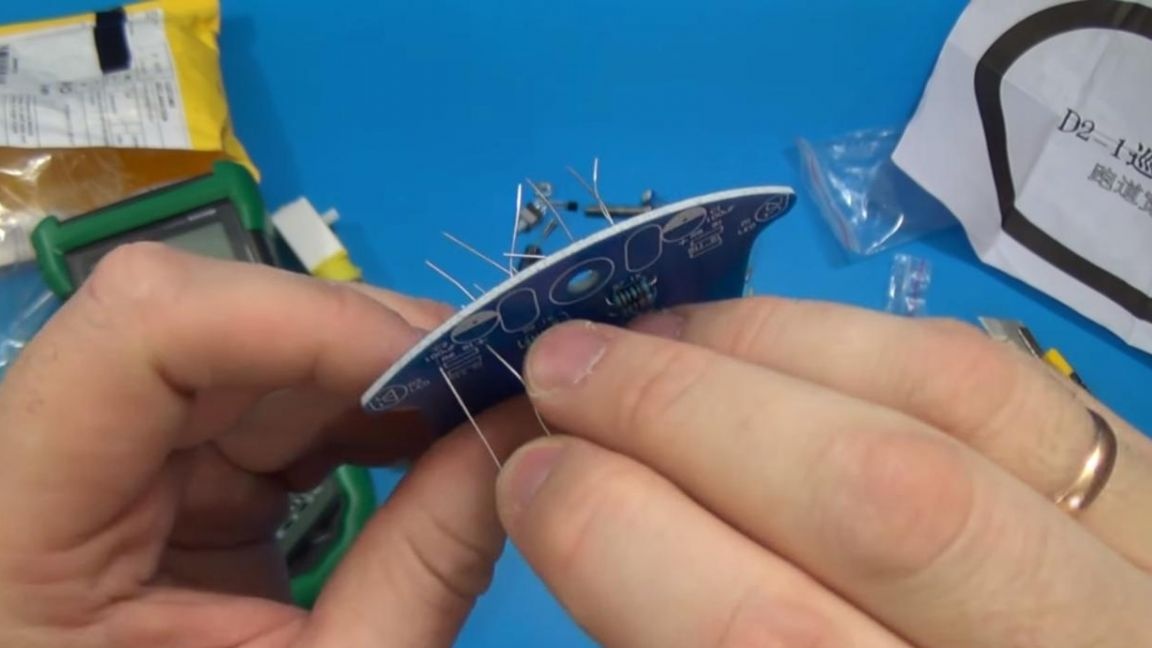
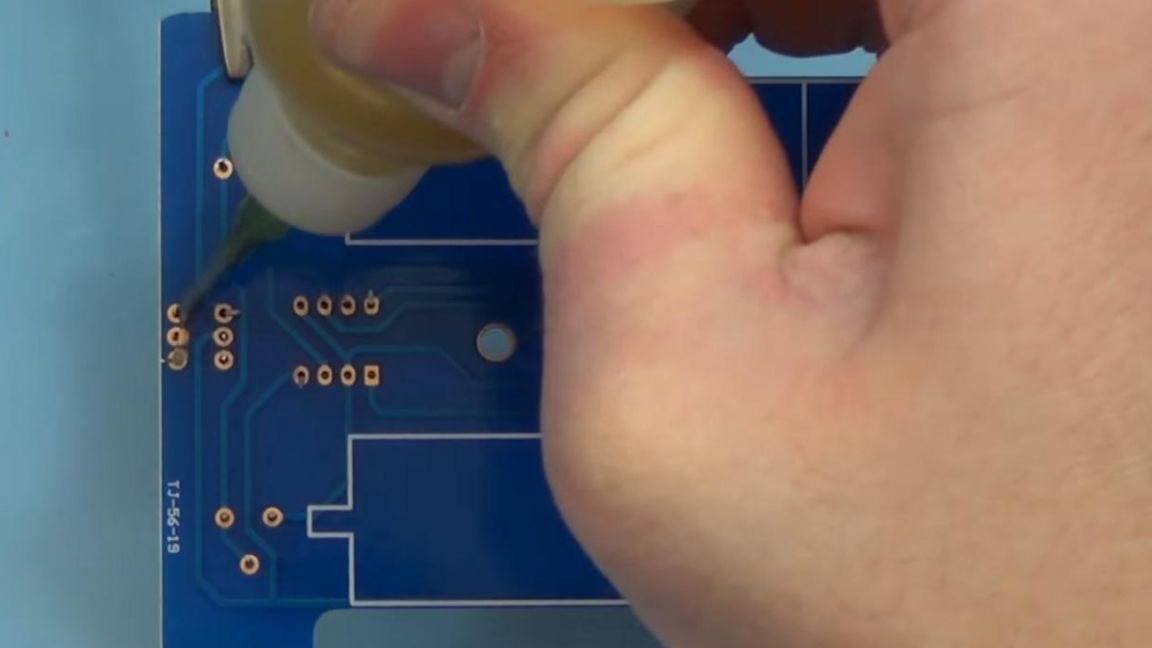
Det är dags att löda komponenterna som är placerade på brädet, fixa den i den tredje handlödanordningen, applicera flöde och löd, lätt mata lodet.
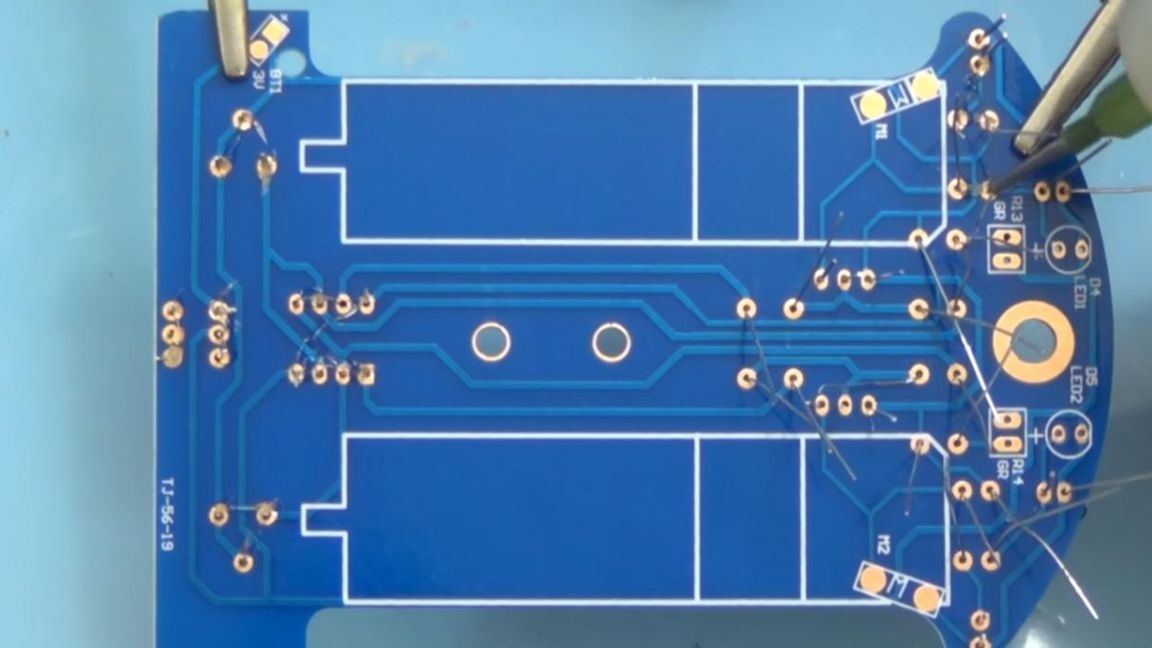
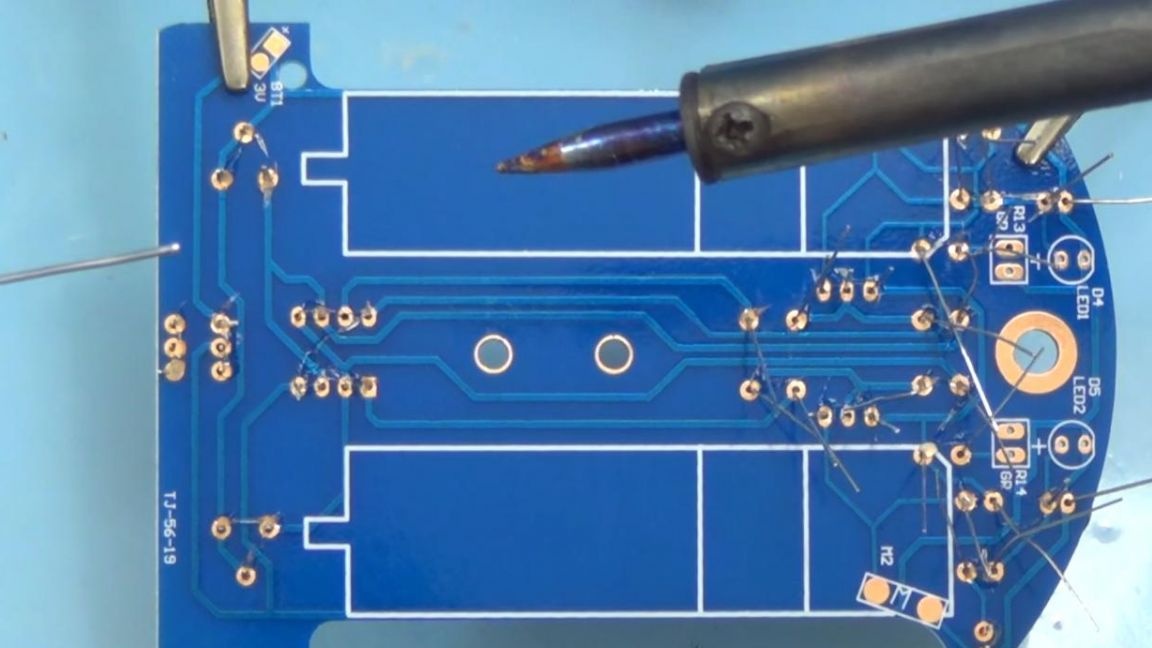
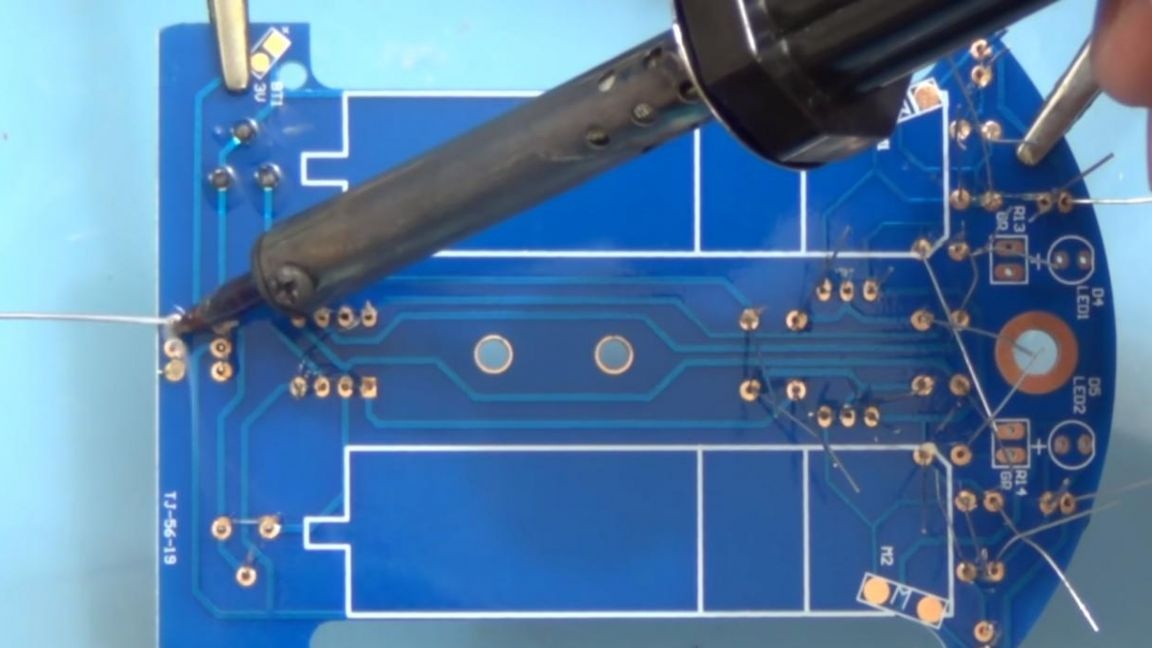
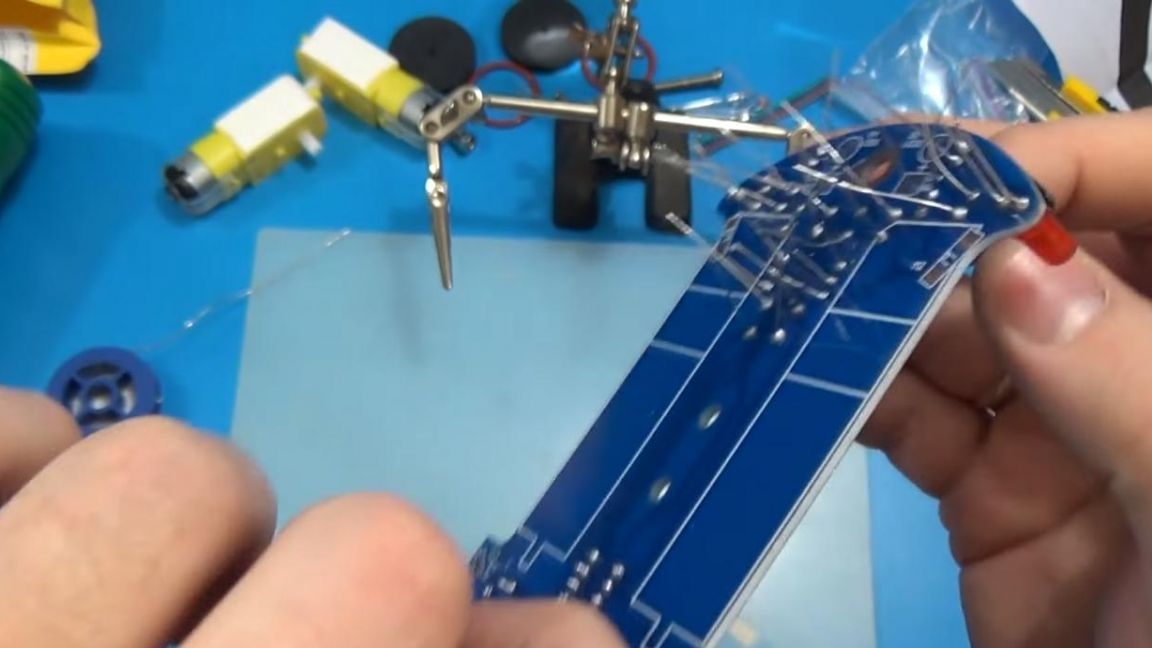
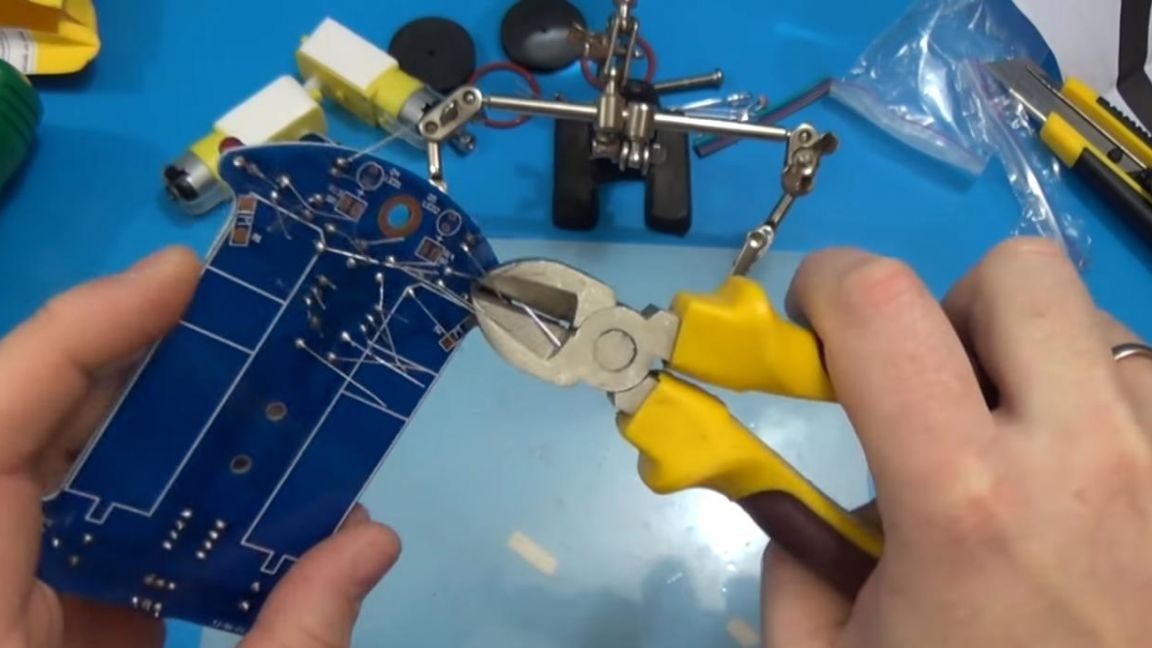
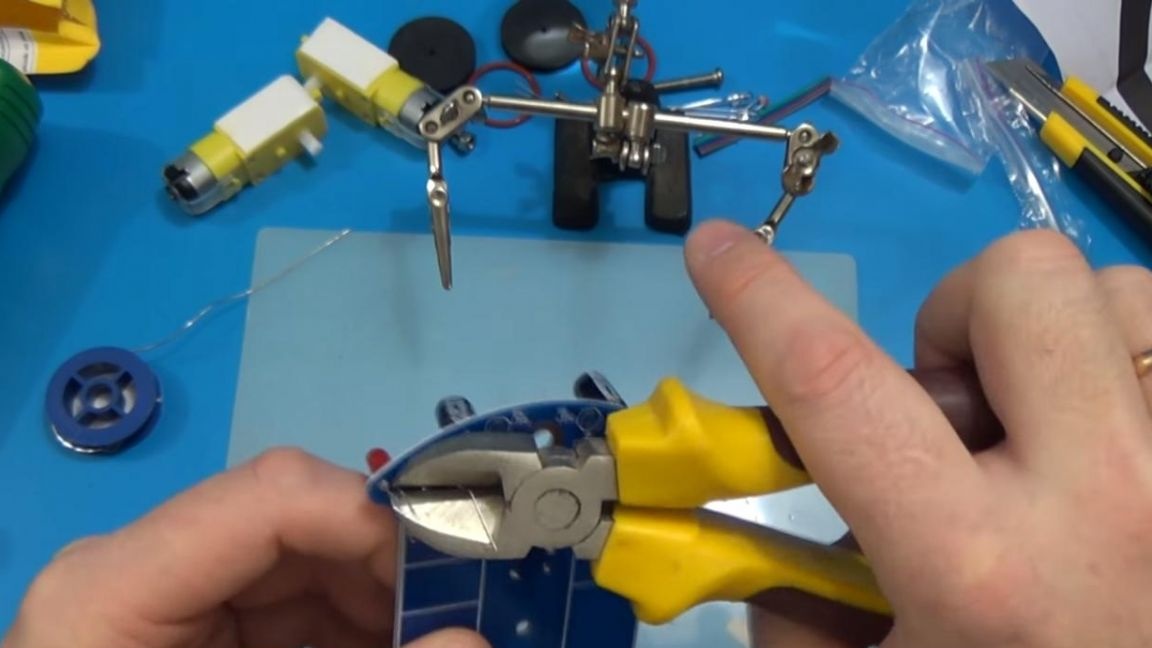
Efter lödning tar vi bort resterna av slutsatserna med hjälp av sidoskärare, men var försiktig med detta, eftersom det är enklast att riva av kontaktdynorna, såväl som spåren i detta skede.
Steg fem
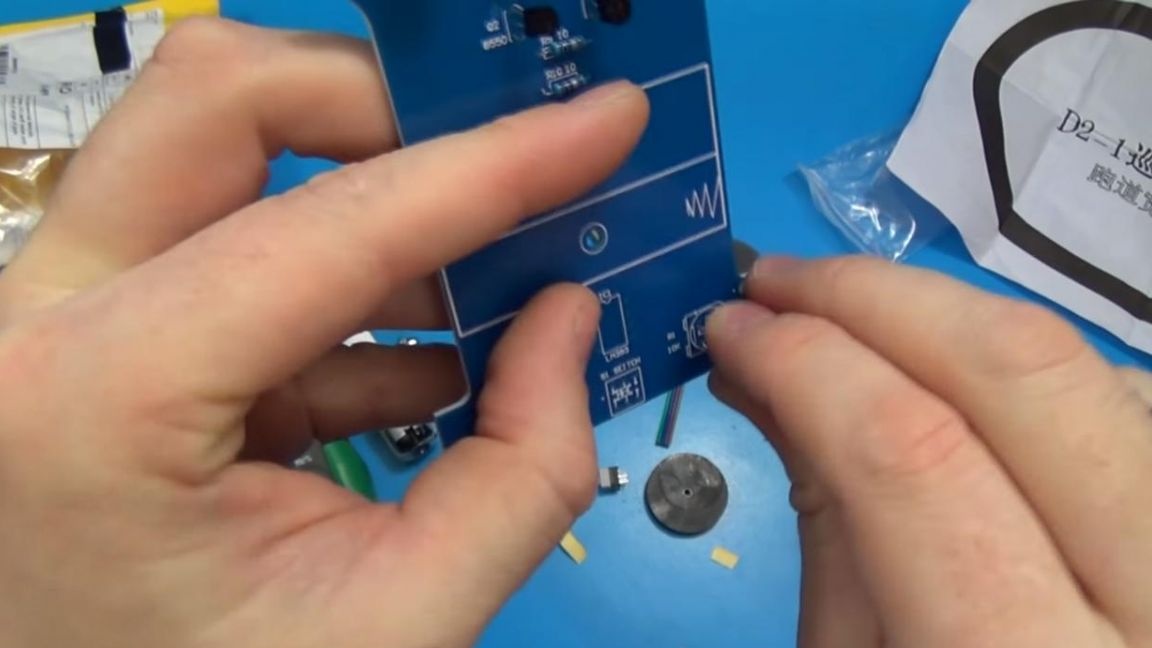
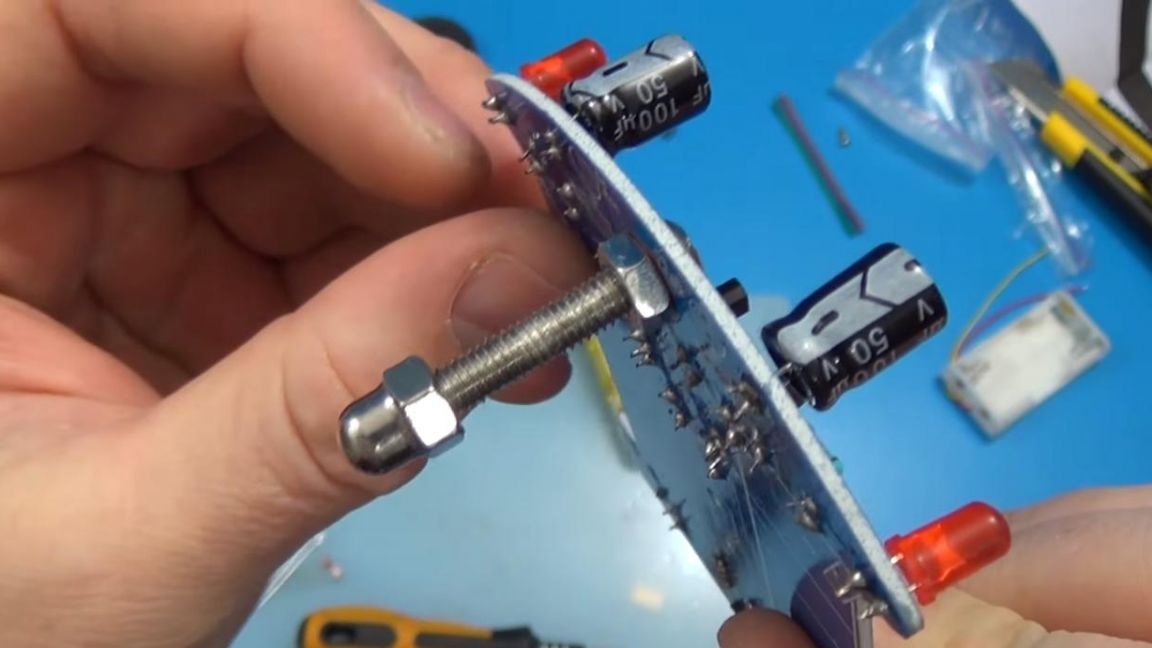
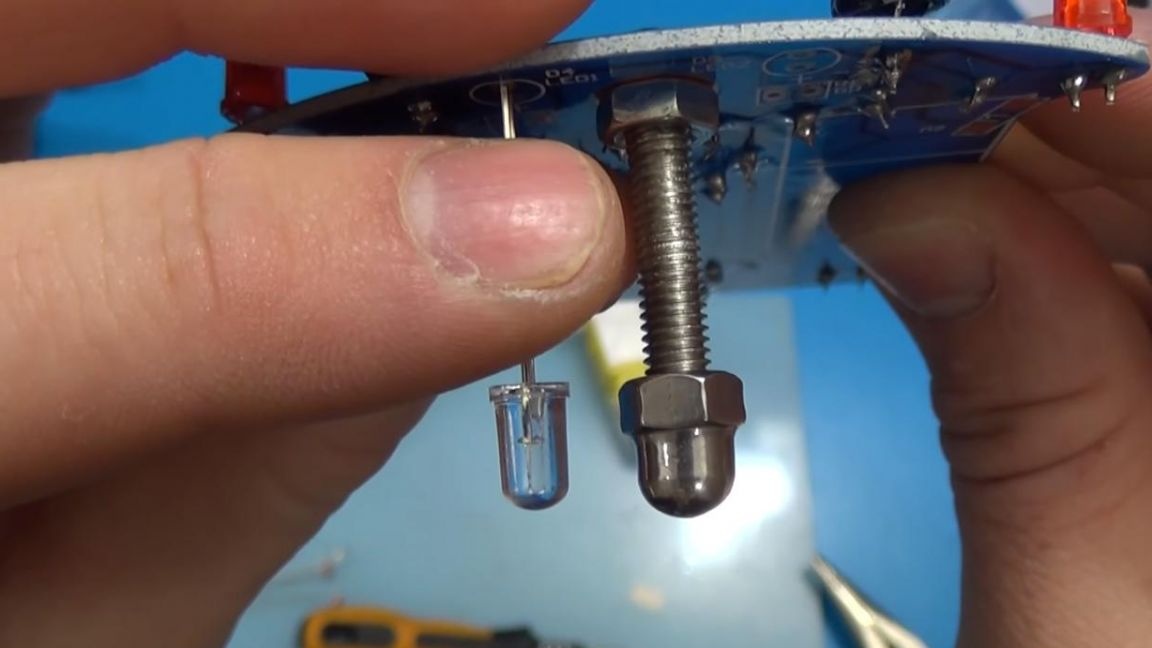
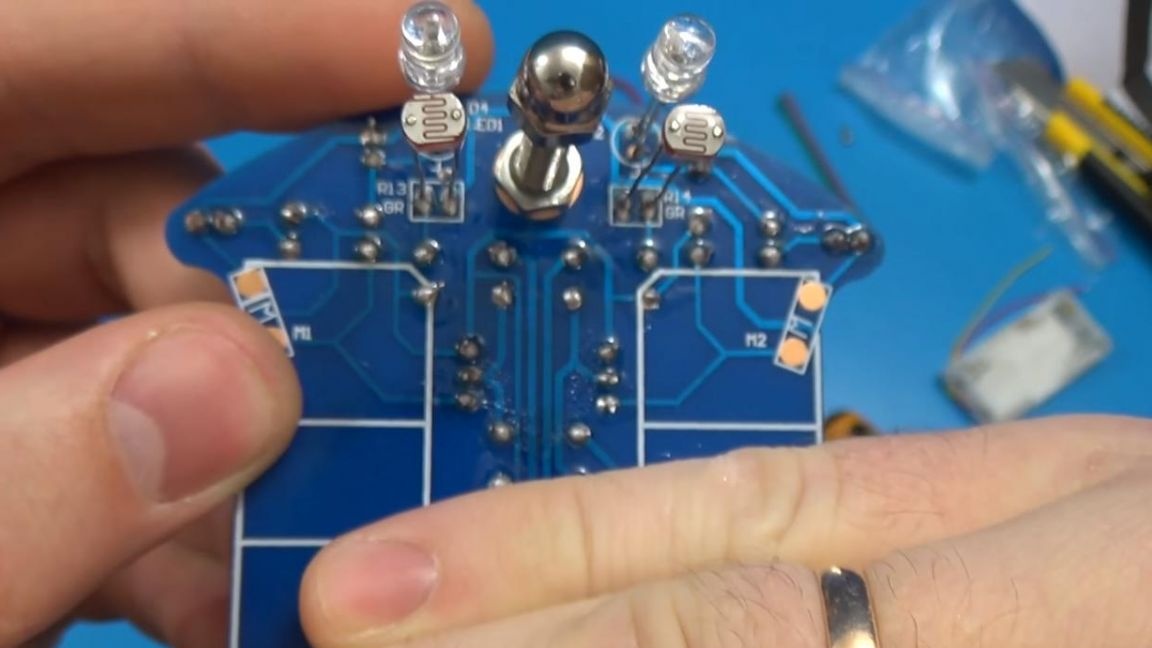
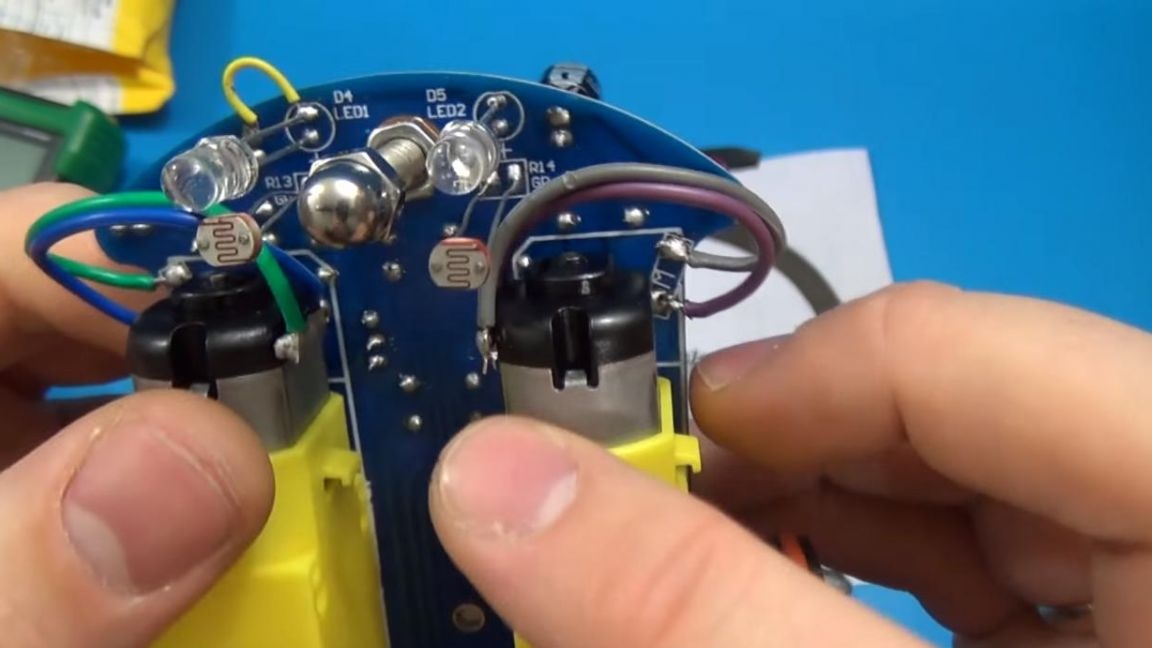
Nu fäster vi skruven på kortet och installerar vita lysdioder bredvid, deras avstånd ska vara 1-2 mm mindre än skruvförlängningen, detta kan tydligt ses på bilden, om detta inte observeras, kommer fotoresistorerna att fungera sämre eller inte fungera alls .

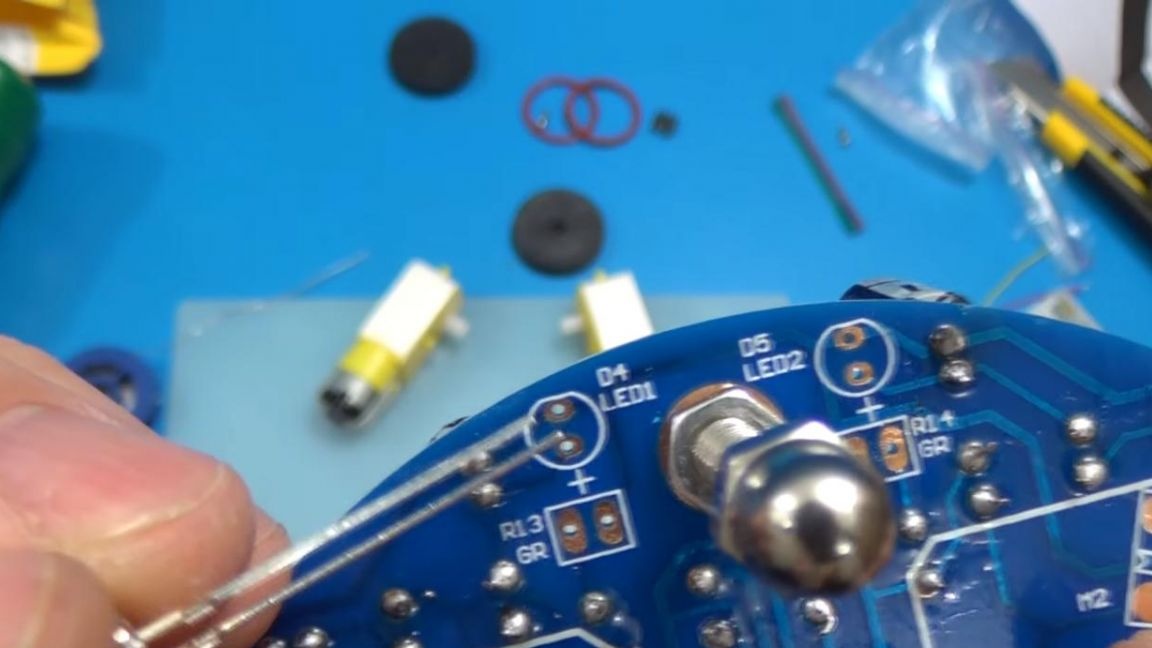
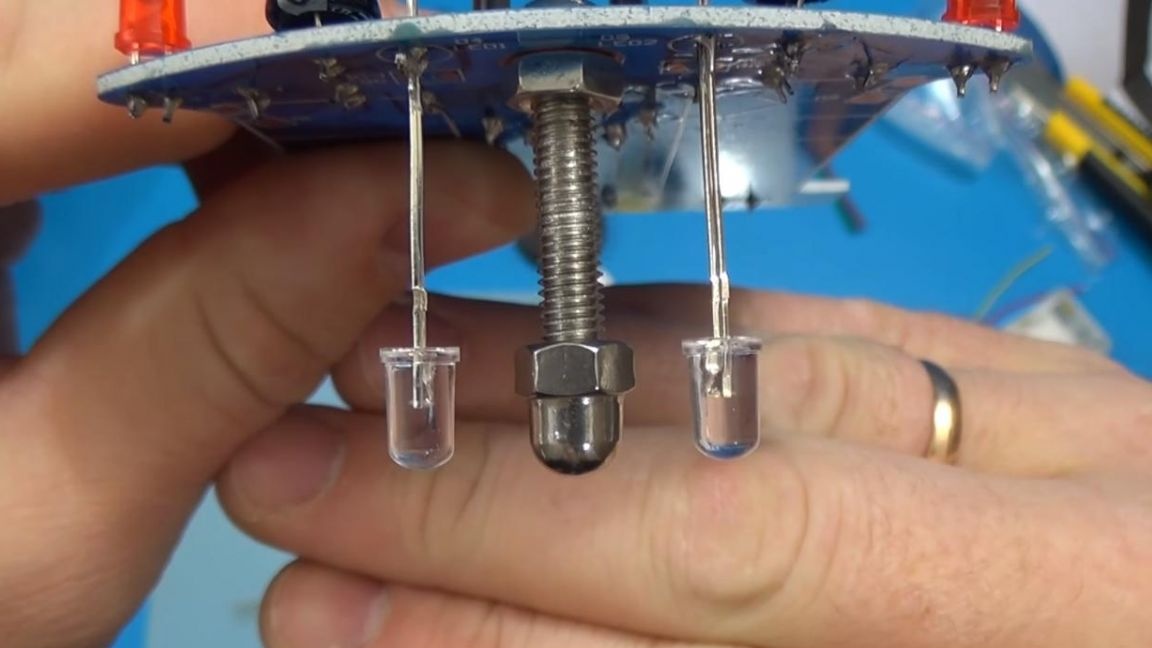
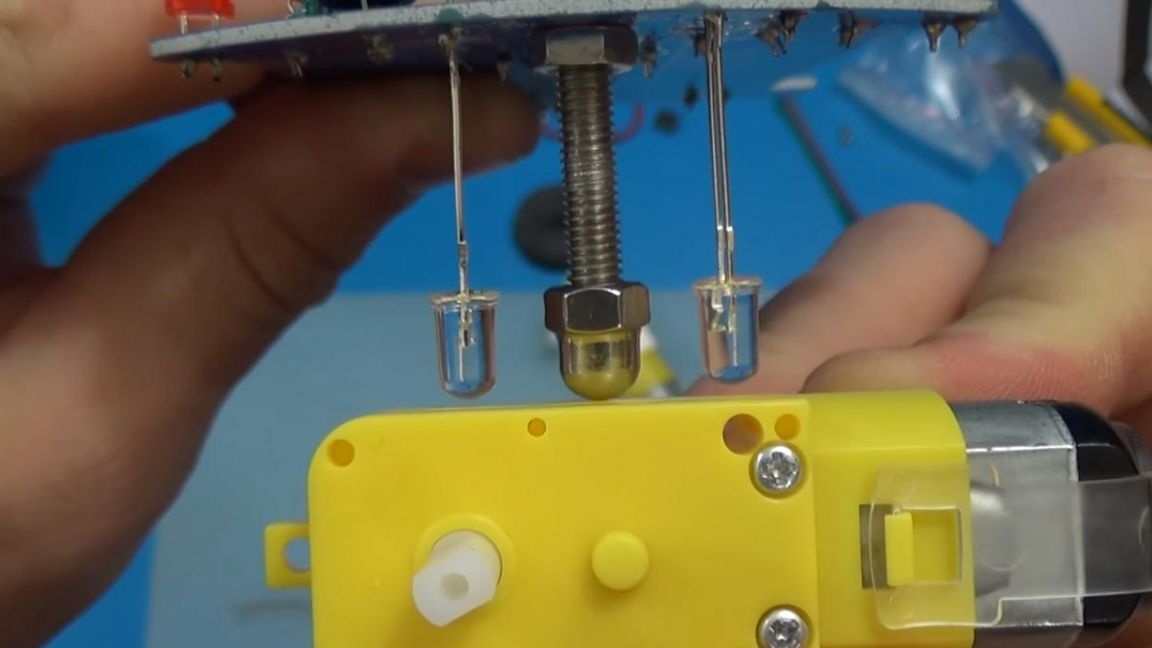
Bredvid bordet lödar vi fotoresistorerna på samma avstånd som lysdioderna.

Steg sex
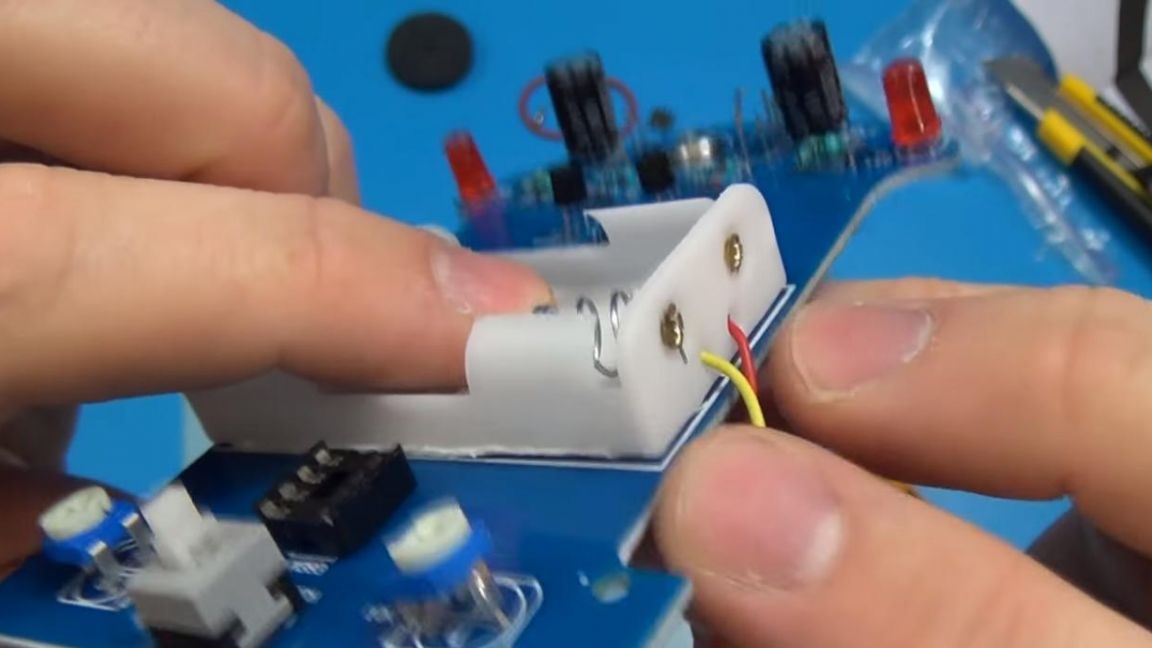
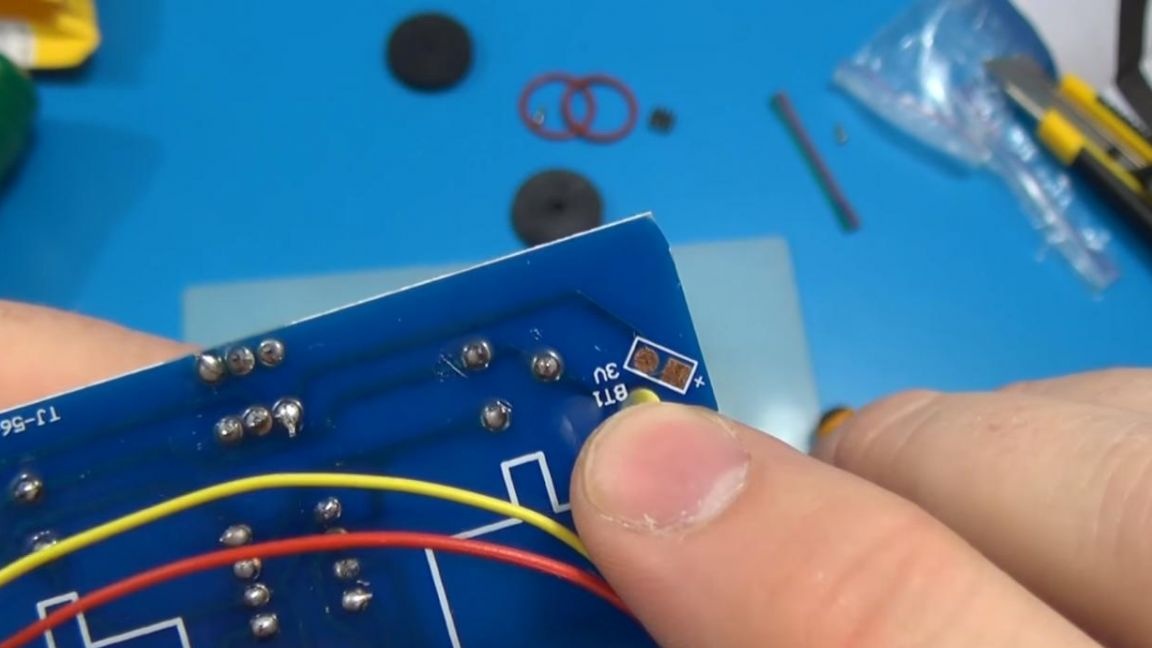
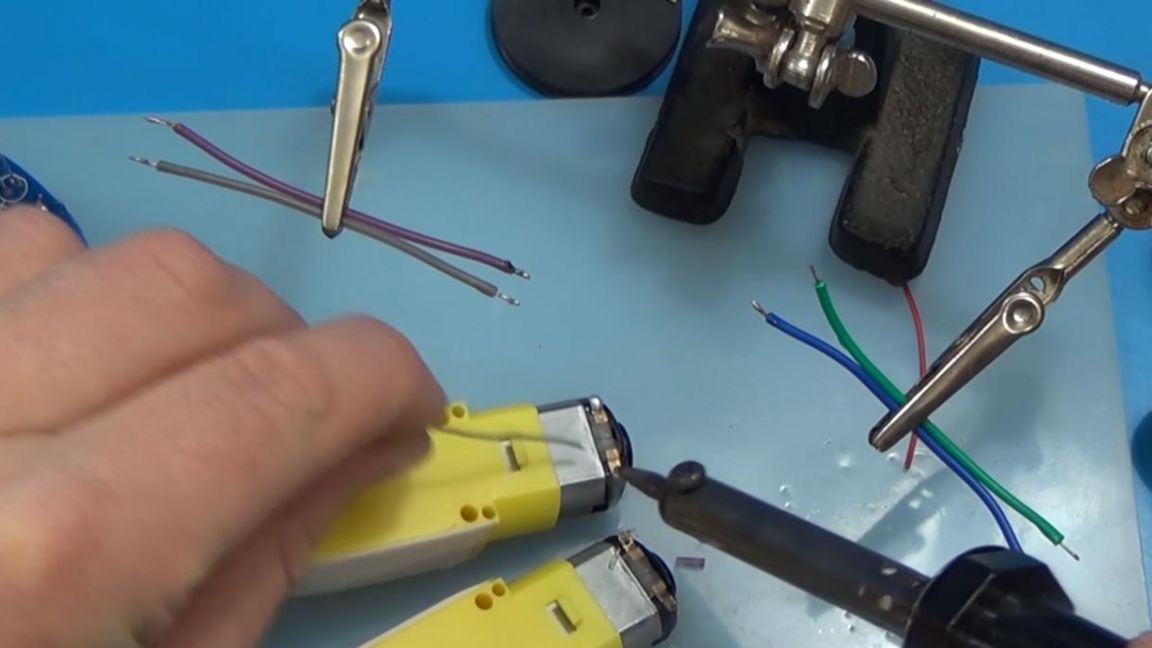
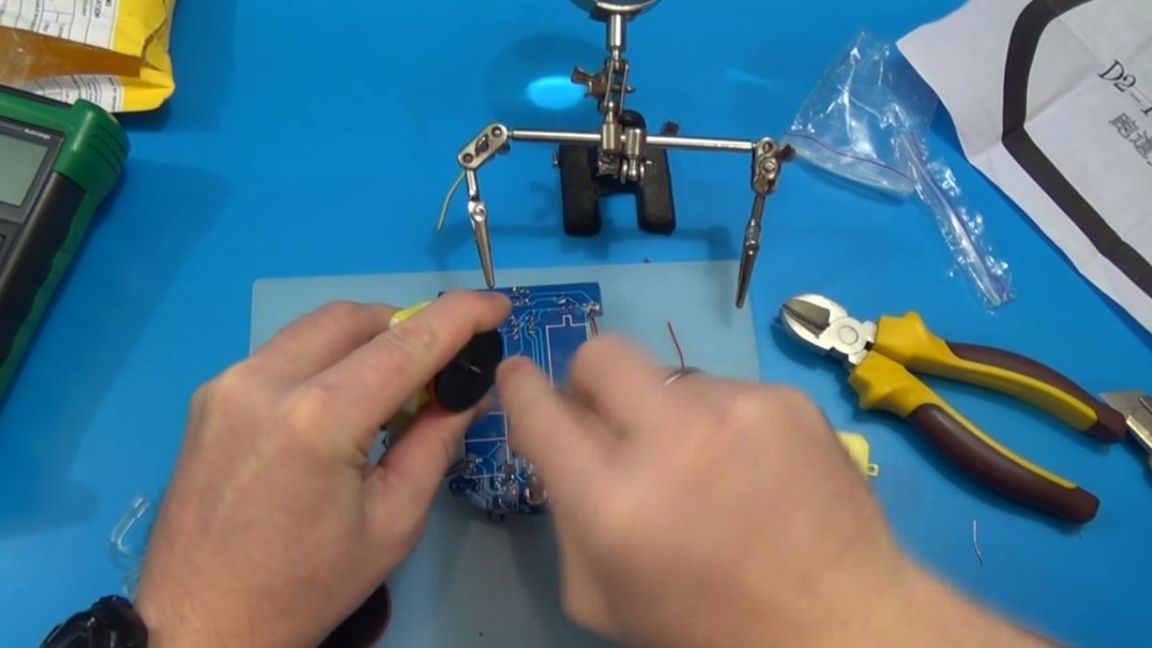
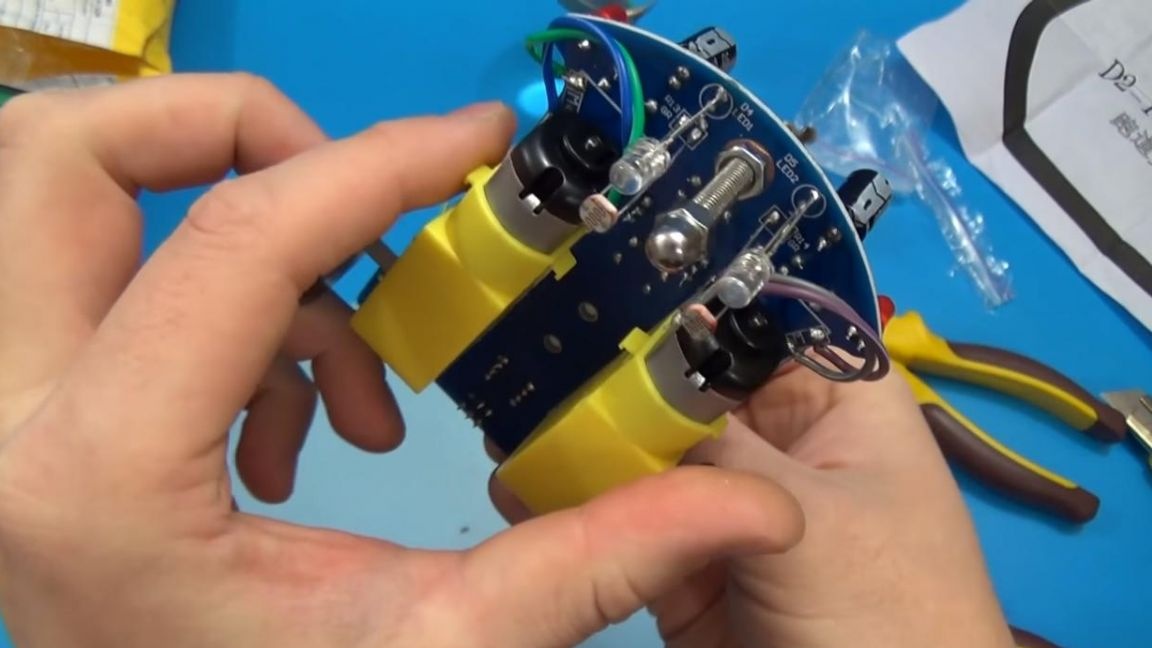
Sedan tar vi motorer med kugghjul, deras kontakter måste dras in och två trådar lödas till dem, vi limer också fodralet för att installera AAA-batterier och löd den gula tråden till minus och den röda ledningen till pluss, eftersom den är signerad på brädet.
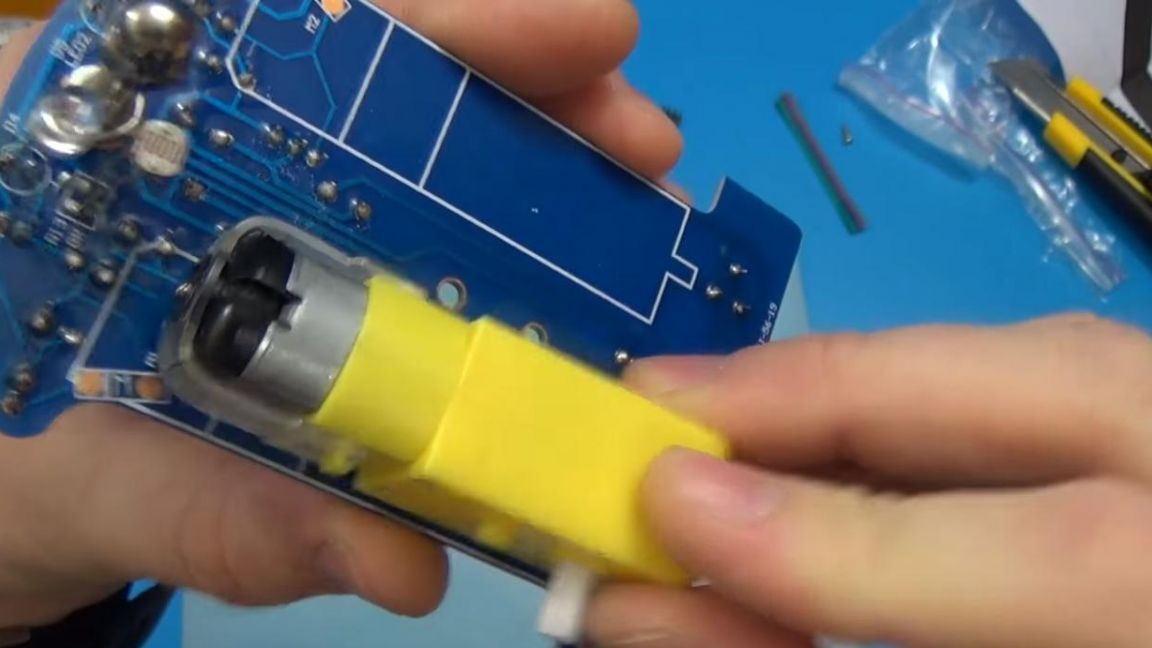

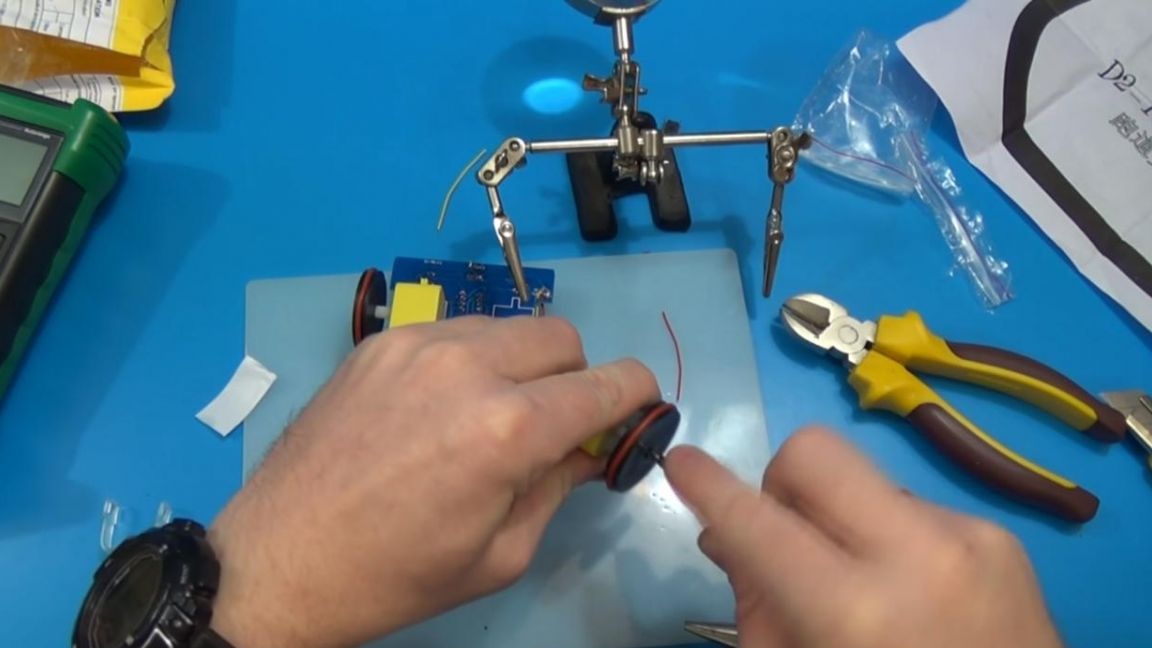
Innan du fäster motorerna måste du fästa hjulen på dem, som är fästa med en bult, och en gummidyna sätts på själva hjulet för bättre grepp.

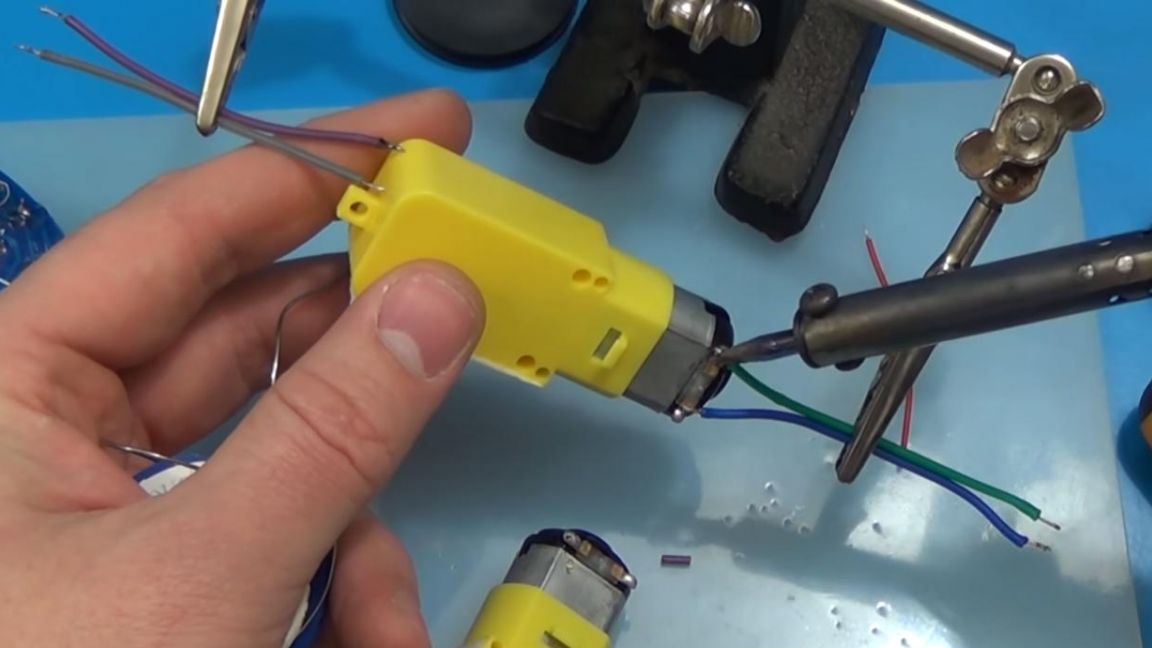
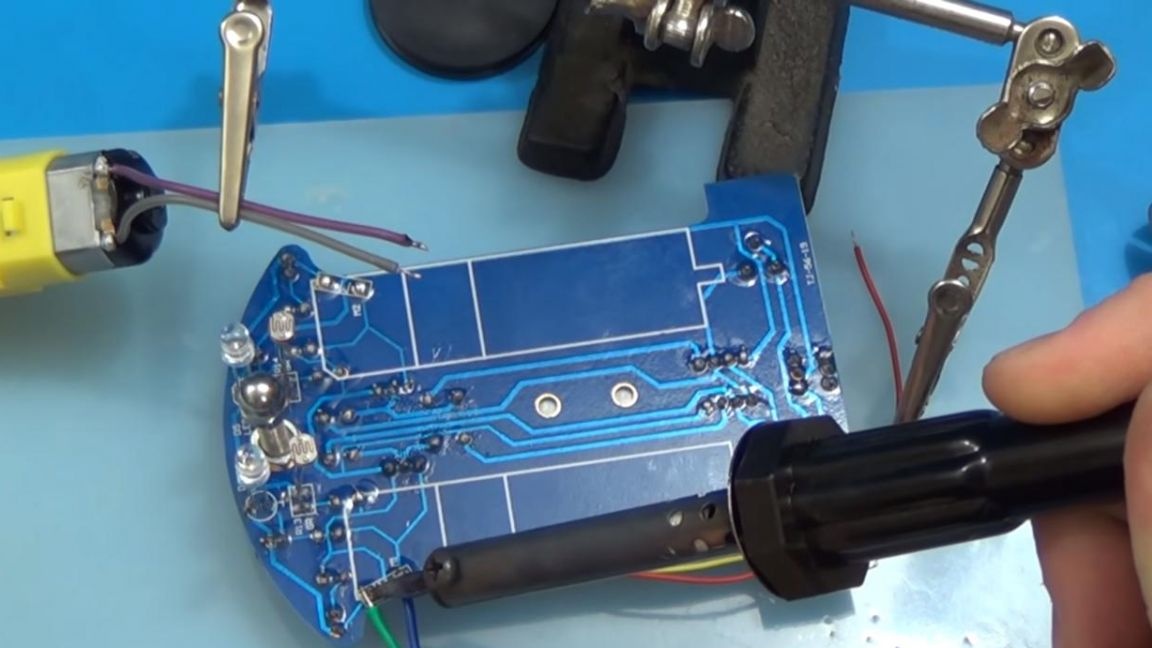
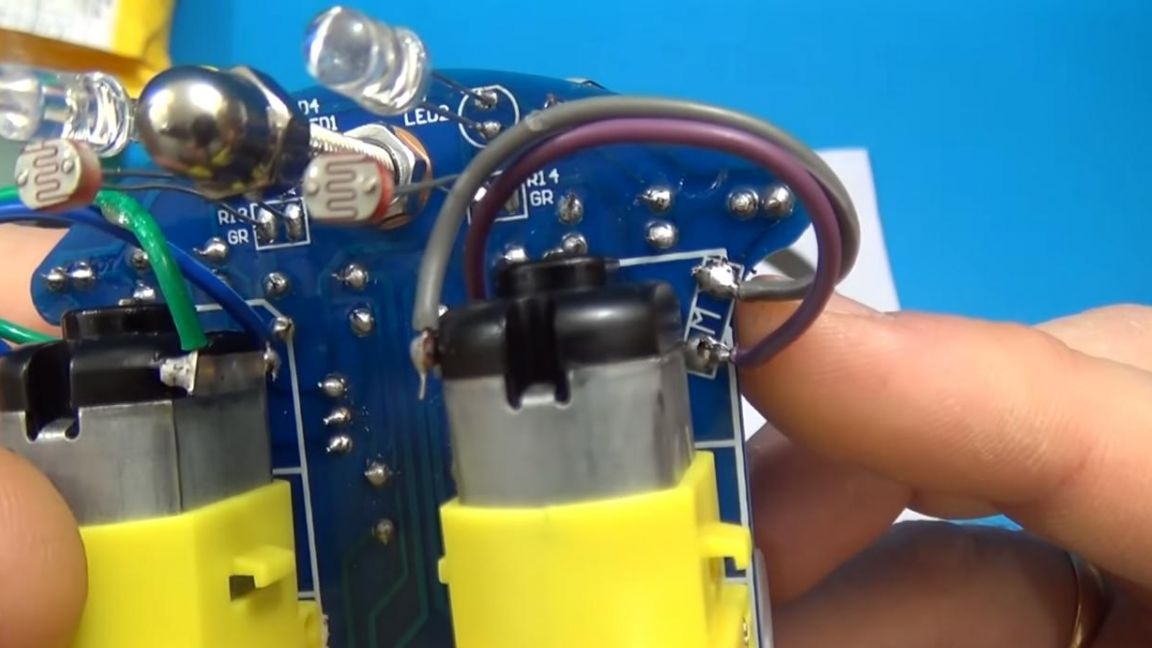
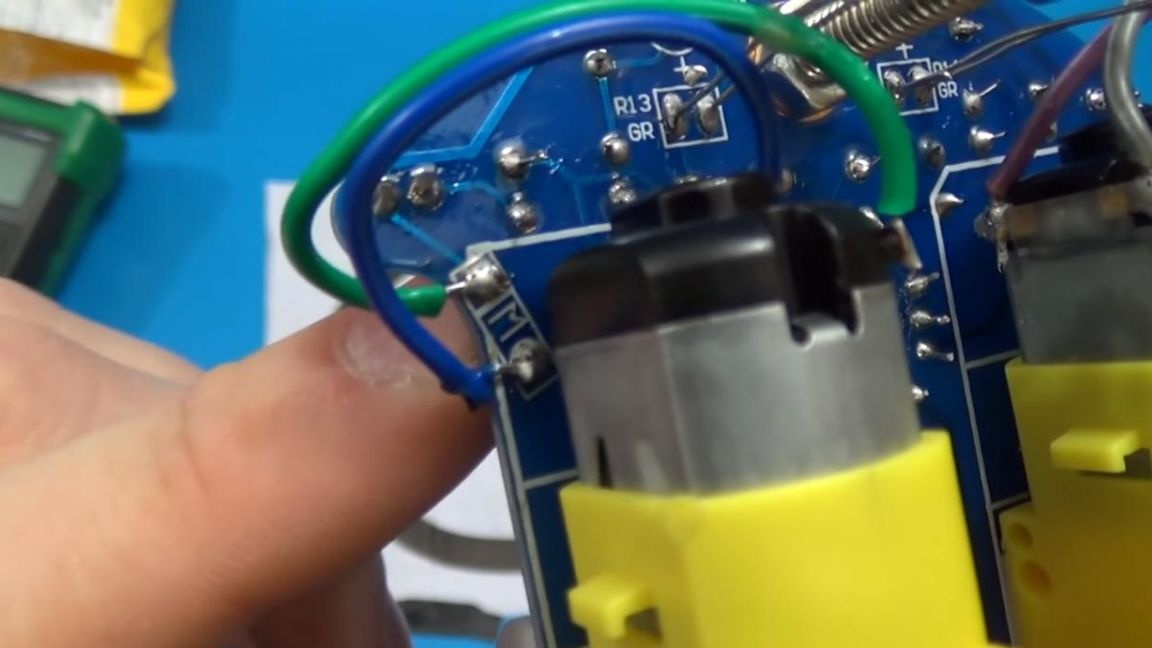
Vi löd trådarna från motorerna till kortet, tyvärr var är plus, och där minus inte anges här, men genom test och fel visade det sig att motorens toppkontakt måste anslutas till toppen på kortet med en tråd och ett lödkolv, med botten, respektive gör vi samma sak .
I slutet av monteringen återstår det att installera mikrokretsen på kortet på sin rättmätiga plats, kombinera nyckeln med kortet och sätt i batterierna, iakttagande av polariteten.

Sjunde steget.
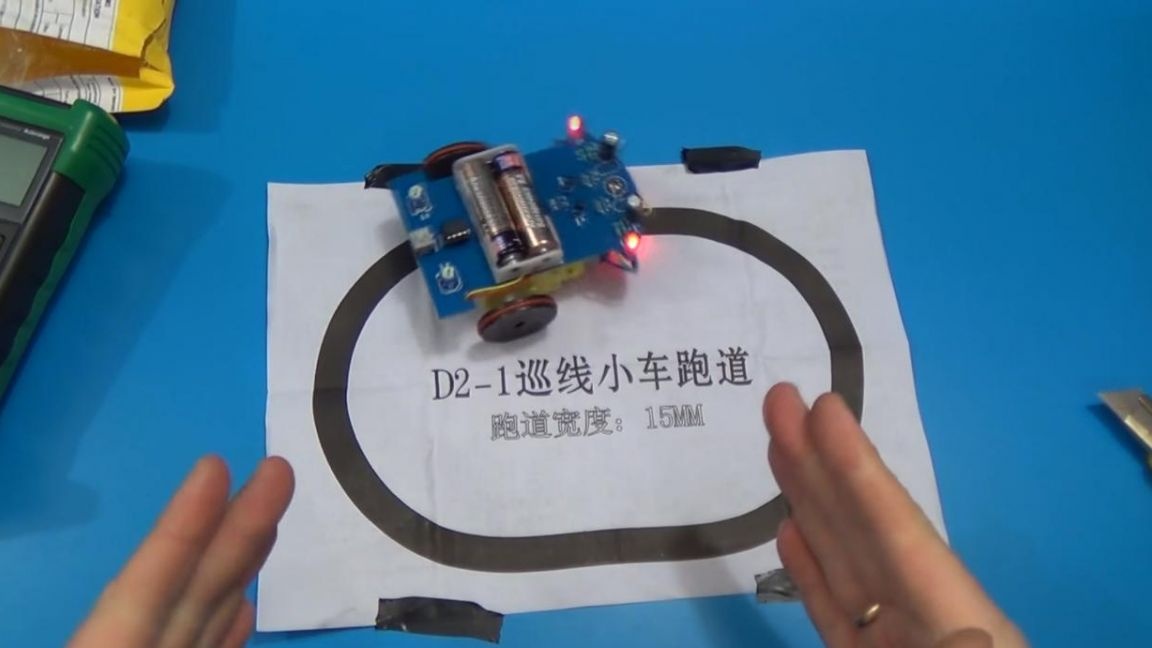
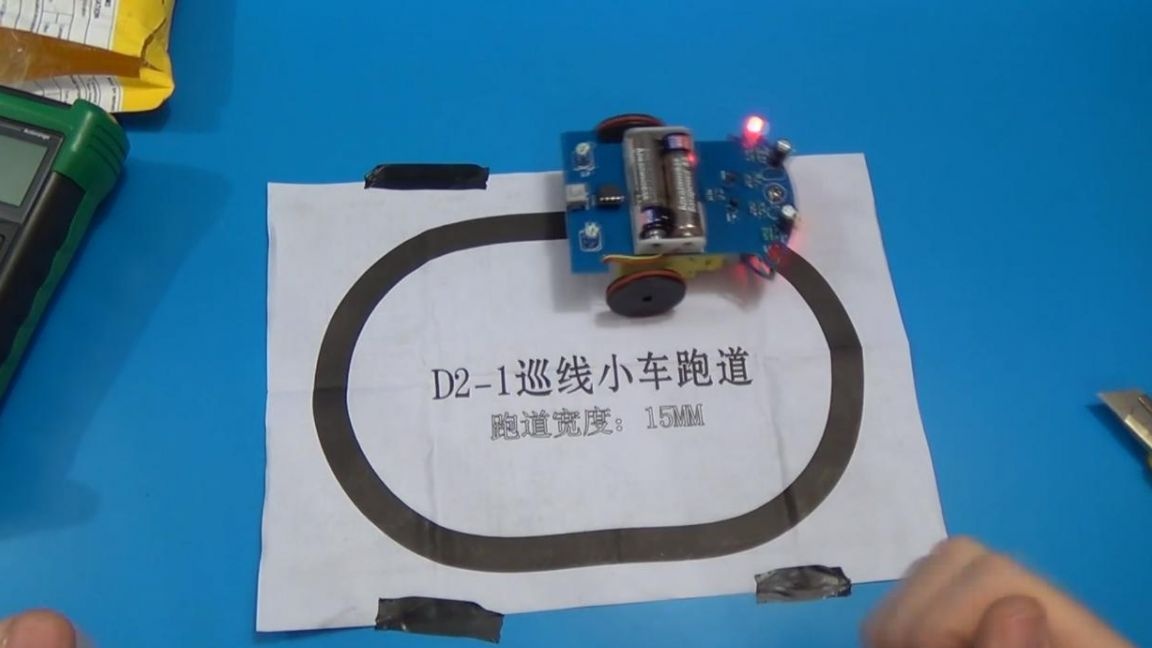
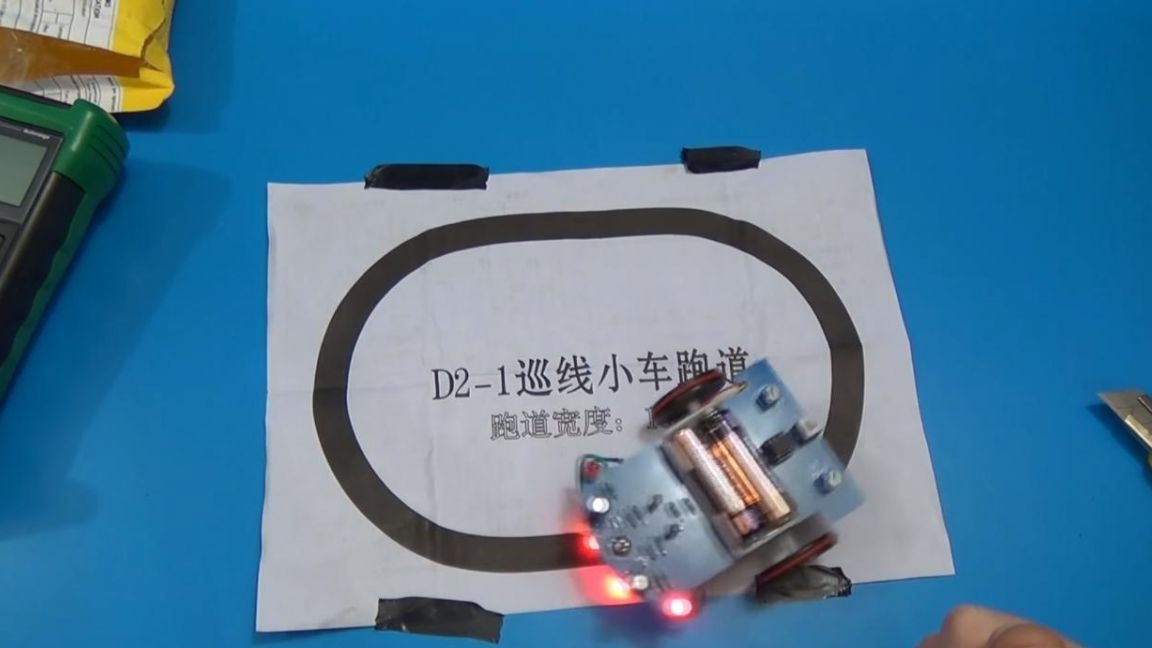
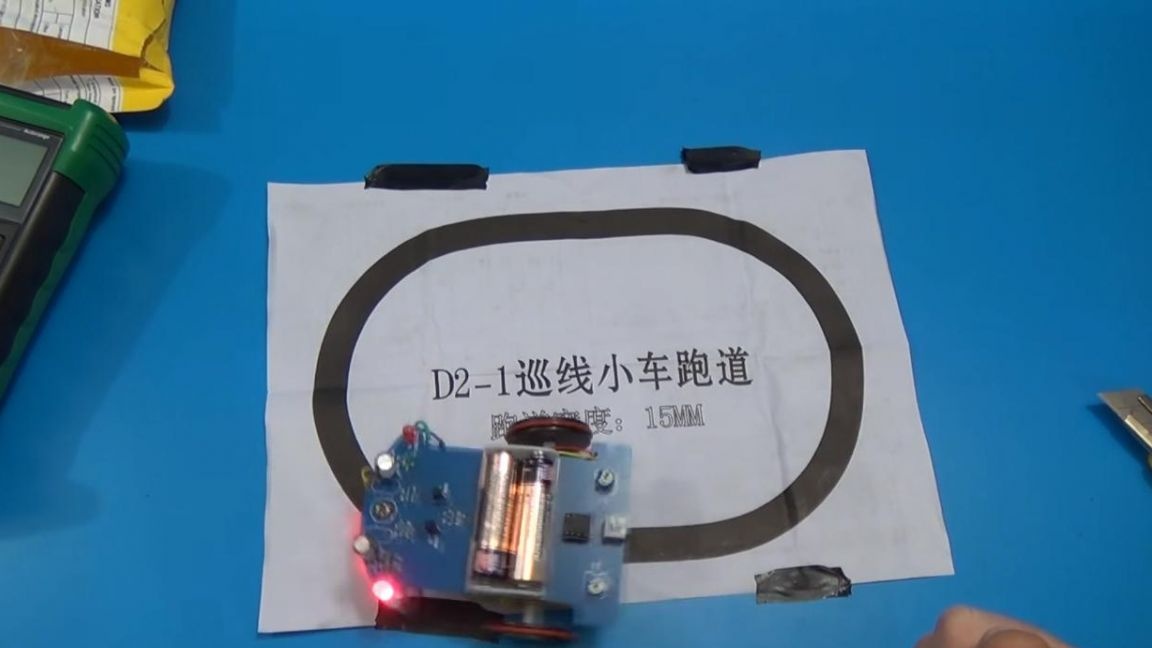
Så det är dags att testa denna robot, i satsen ingick instruktioner på baksidan av vilka en oval ritades med en linje med en bredd på 15 mm, vilket är det optimala värdet.
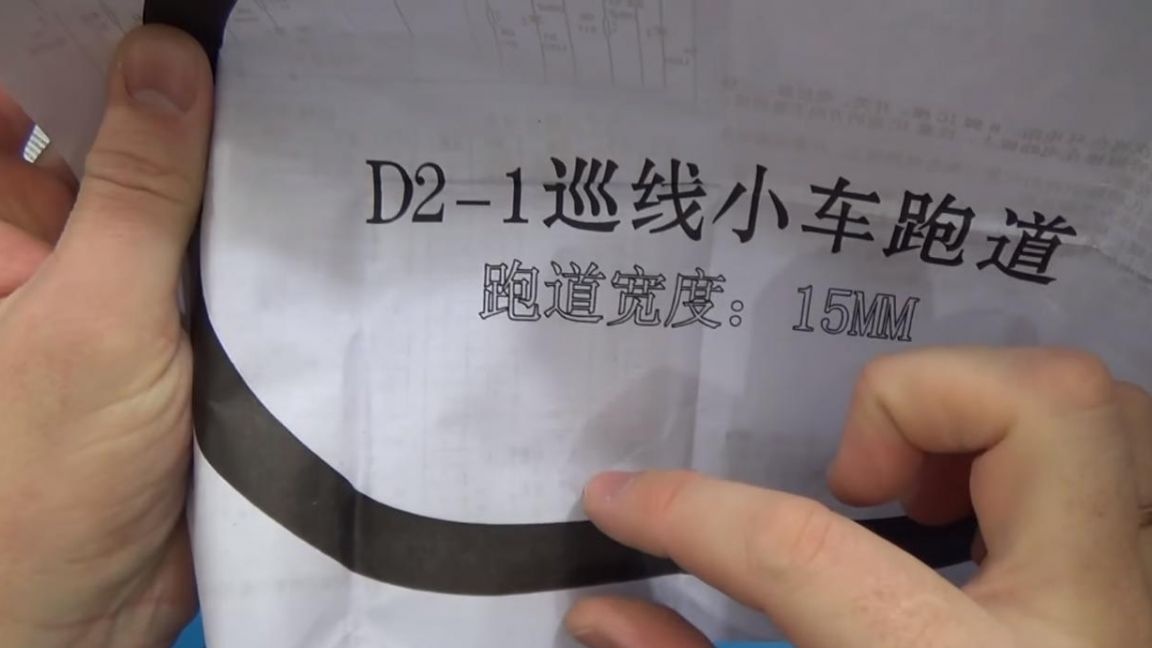
Tryck på strömbrytaren och roboten Jag gick, för hans korrekta funktion, linjerna bör inte vara vassa, det vill säga, han kommer inte att kunna göra vassa. Till exempel kan du göra ett spår med jämna svängar genom att applicera ett band med en bredd av 15 mm på en jämn beläggning.
Det är allt för mig, tack alla för er uppmärksamhet och kreativa framgång.