Hans gång är mycket lik en riktig kackerlacka. När det går, svänger det lite och klarar sig säkert framåt. Kackerlackan har ett minimum av komplexa delar och är mycket lätt att tillverka.
1.Videotest
Videon visar en mekanisk kackerlacka från olika vinklar under dess drift och rörelse.
2. Egenskaper och funktioner.
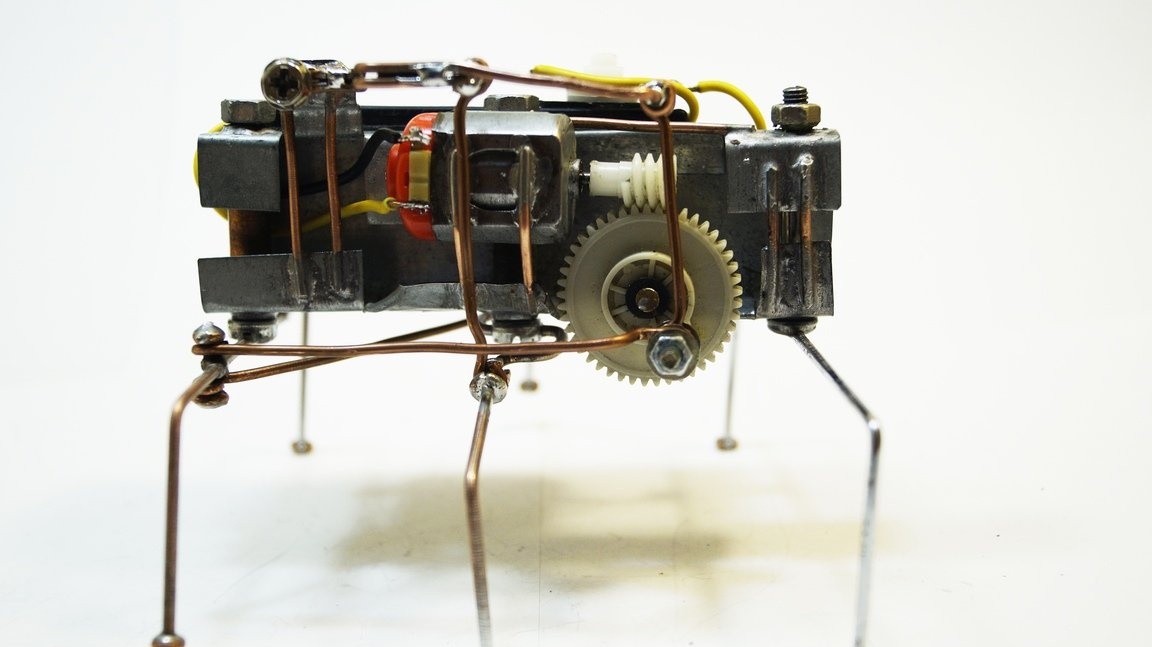
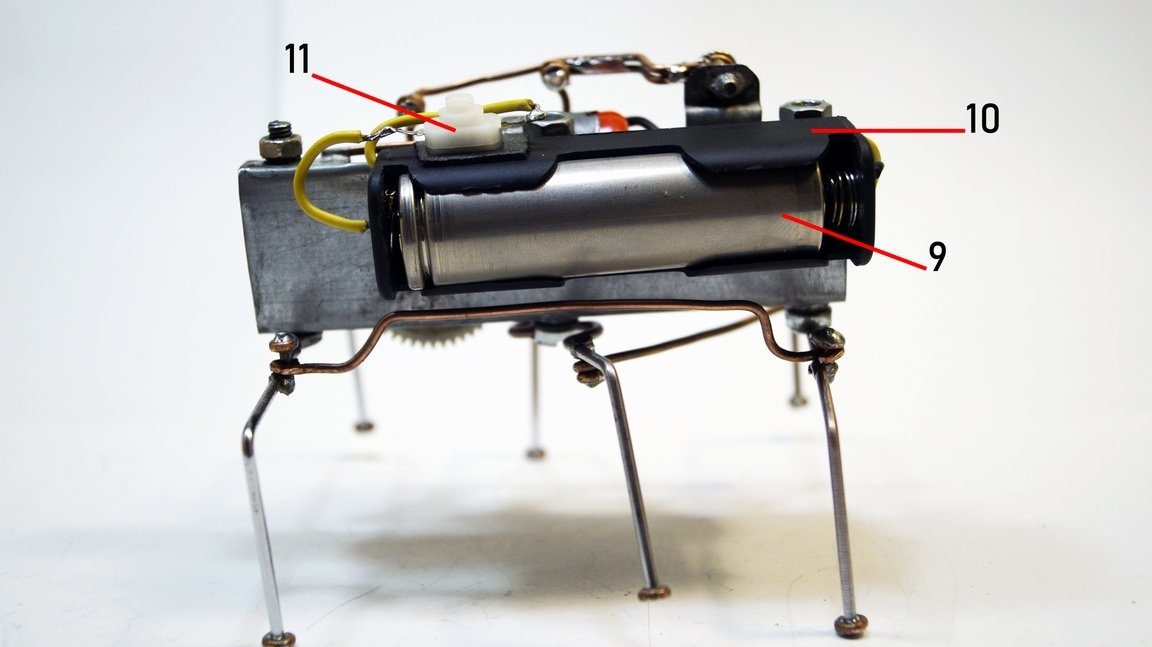
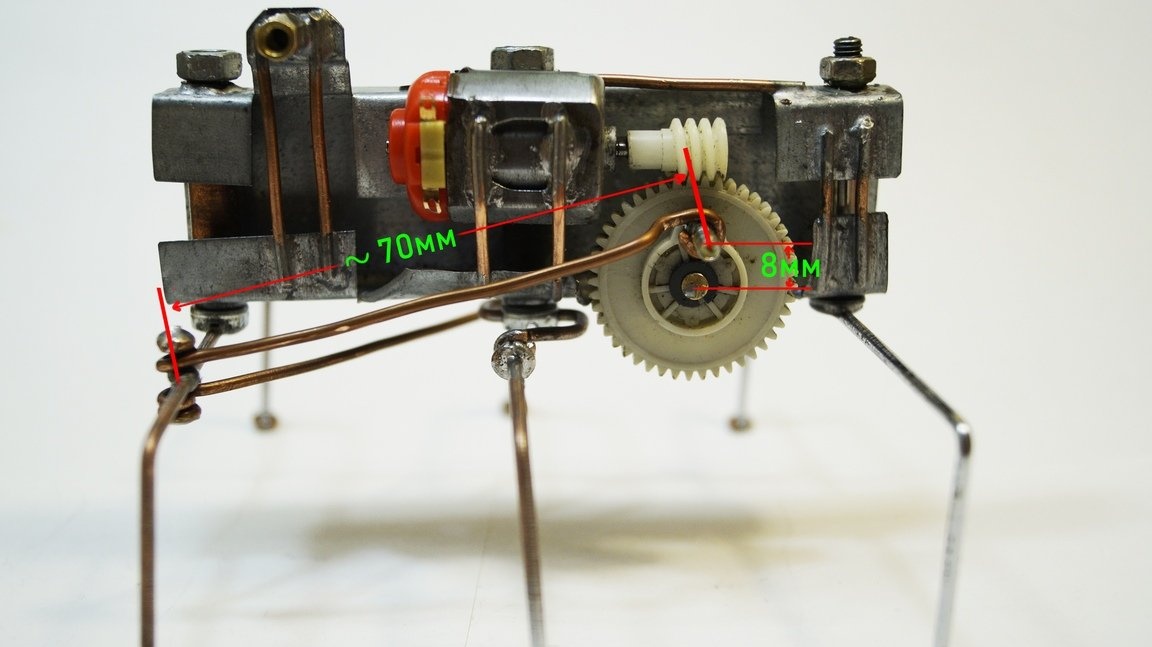
På ett foto 1. Den mekaniska kackerlackan visas, från sidan. På ett foto 2. Ovanifrån visas.
Foto 1.
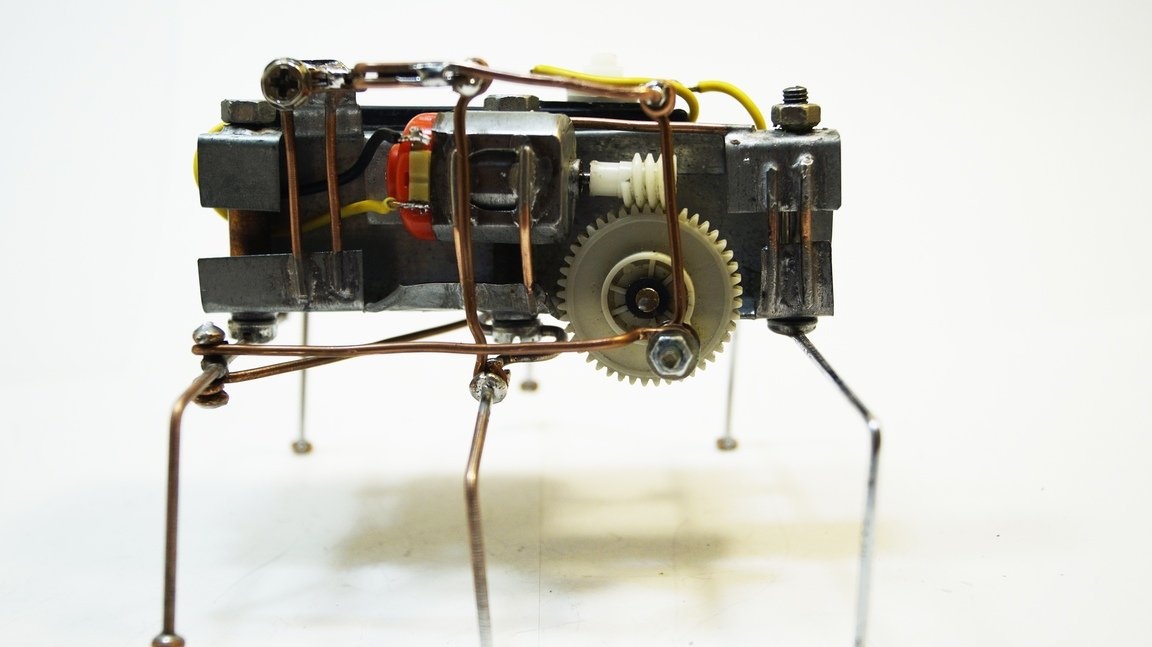
Foto 2.
Construction. Som en ram användes profilen ppn-2 30X20. Motorn och andra fogar monterades genom lödning. Tackar på en kackerlacka är fästa med M6-bultar. Strömbrytaren och batterifacket är limmade på dubbelsidig tejp. Som en dragkraft för att driva benen på en kackerlacka användes en kopparkabel med en sektion på 2,5 mm.
MOTOR OCH KRANER. Motorn och vevaxeln är lödda till ramen på POS-61, lödningssyra ZnCl (zinkklorid). För att öka vridmomentet och minska storleken användes en maskutrustning.
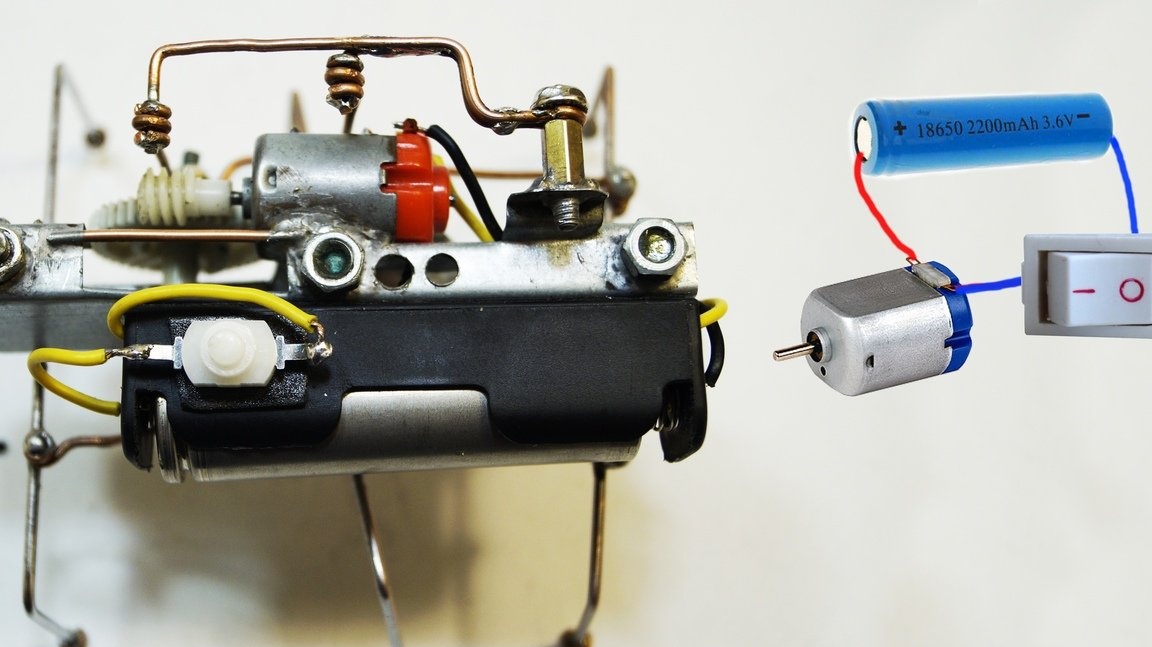
STRÖM. Ett batteri från 18650 användes som robotens kraft. Strömkällan är 3,7V.
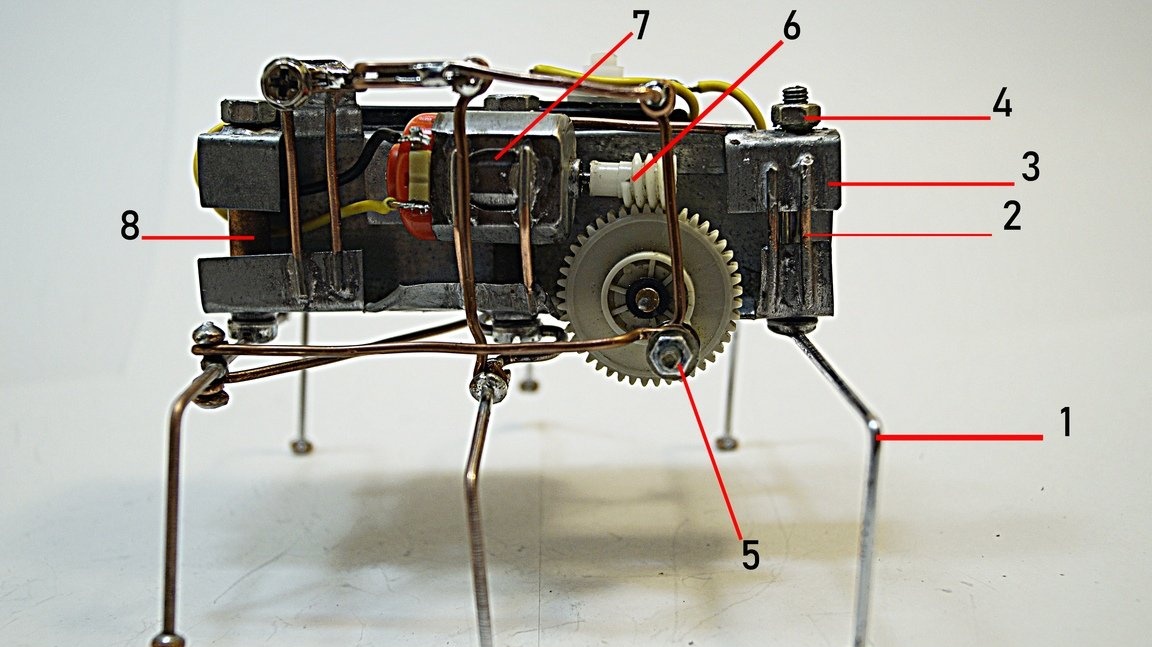
ROBOT DESIGN DETALJER
1. Tassar på en kackerlacka.
2. Förstyvningen.
3. Ramen.
4. Axlarna på tassarna på en kackerlacka.
5. Vevmekanism.
6. Maskdrev.
7. Elmotor F130 5 V.
8. Kackerlackotassens hylsaxel.
9. Batterityp 18650, 3,7 V.
10. Batterifack.
11. Strömbrytare.
3. Principen om arbete.
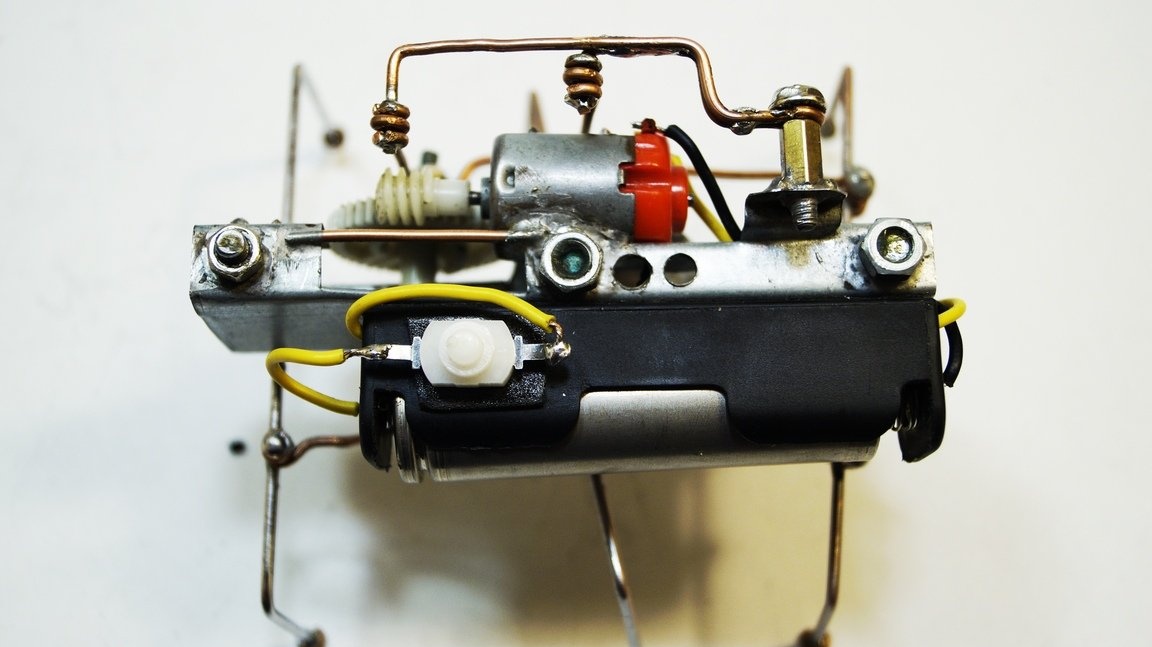
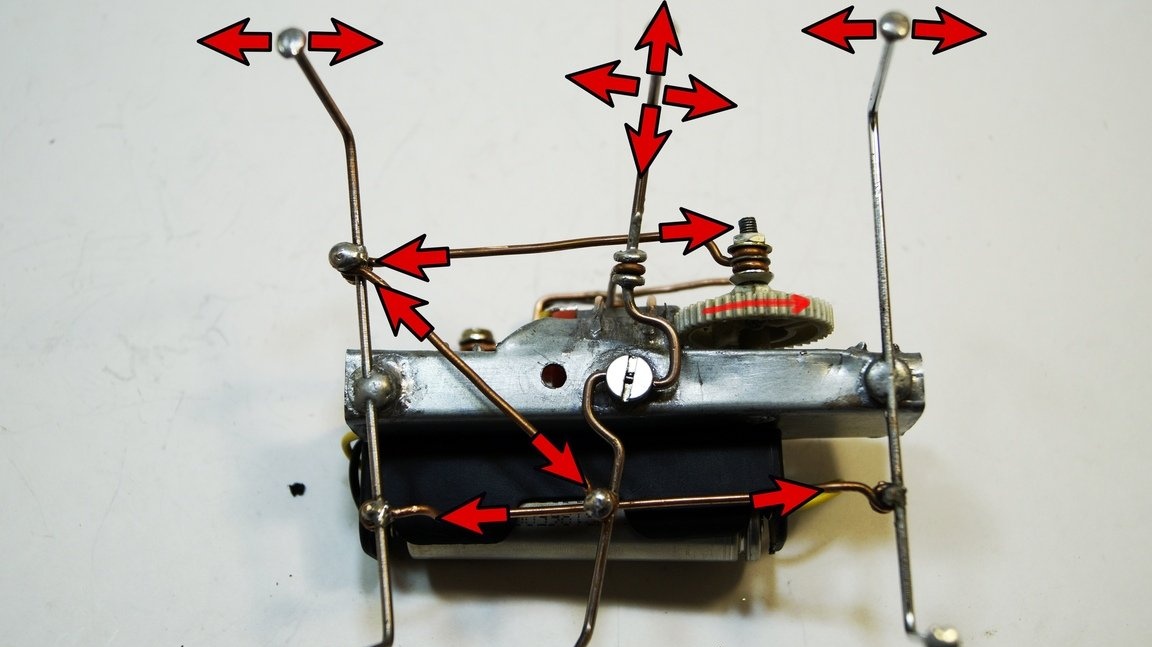
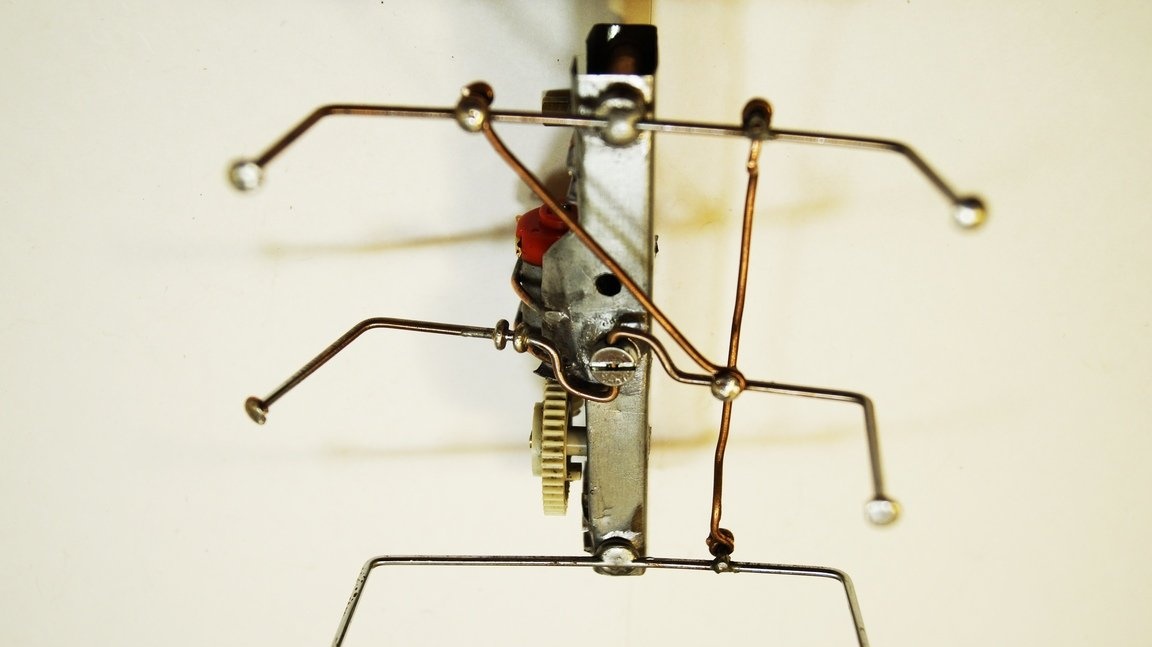
På ett foto 3. 4. Principen om arbete för mekaniska delar av en kackerlacka visas. Det är värt att komma ihåg att robotens främre och bakre ben rör sig horisontellt och mellanbenen rör sig vertikalt och horisontellt.
Kraft matas till elmotorn genom nyckeln, motorn roterar vevmekanismen. Vevet driver framtassen genom dragkraft respektive från framtassen, tryckkraften skjuter den bakre tassen (de rör sig synkront). Det mittersta benparet är anslutet till det första paret tvärs (de rör sig i antifas).
För att flytta det mittre löparet vertikalt är en spak monterad ovanför motorn, som är i rörelse från vevmekanismen.
Foto.3
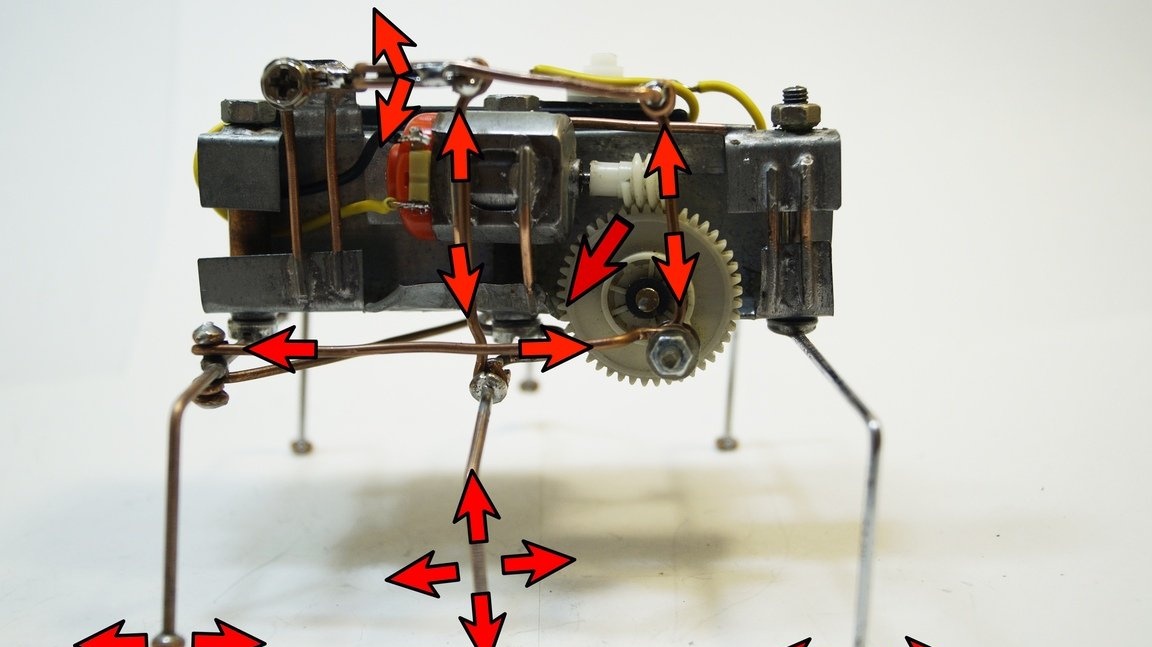
Foto.4
4. Material och verktyg.
1. Lödjärn 50W.
2. Batterifack.
3.Prysoy POS-61.
4. En koppartråd med en sektion på 2,5 mm.
5. Lödning av syra ZnCl (zinkklorid)
6. Elmotor F130 5V.
7. Sax för metall.
8. Maskdrivning.
9. Tång.
10. Stålrör, diameter 80 mm.
11. Uppladdningsbart batteri 18650.
12.Profile PPN-2 30X20.
Och också: (strömbrytare, dubbelsidig tejp, monteringsledning)

5. Monteringsanvisningar.
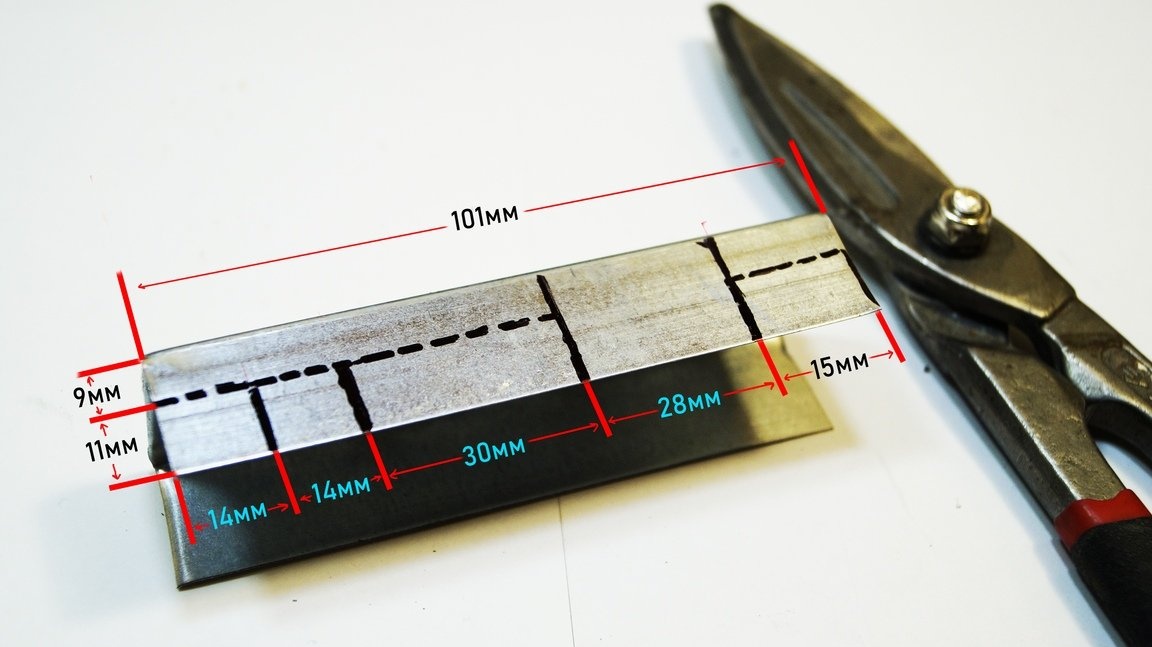
1. Ta en kackerlackaram.
Rita markeringen på profilen som anges i foto 5.
Foto 5.
Med hjälp av saxar för metall skärs och böjs vi arbetsstycket med en tång som visas på foto 6. Markera den undre delen som anges i foto 6. Böj profilen med en tång som på foto 7.
Foto 6.
Foto 7.
2. Elektrisk motor och vevaxel.
Nästa steg är att löda den elektriska motorn till ramen. Motorn innan lödning måste demonteras. Vi översvämmer motorhuset och ramen med en lödkolv Photo 8.
Vi löd elektromotorns och ramen ihop och värmer delarna väl med en lödkolv, pressar dem mot varandra Foto 9. !!! VAR SÄKER, DETALJER VÄRMA MYCKET VARMT
Foto 9.
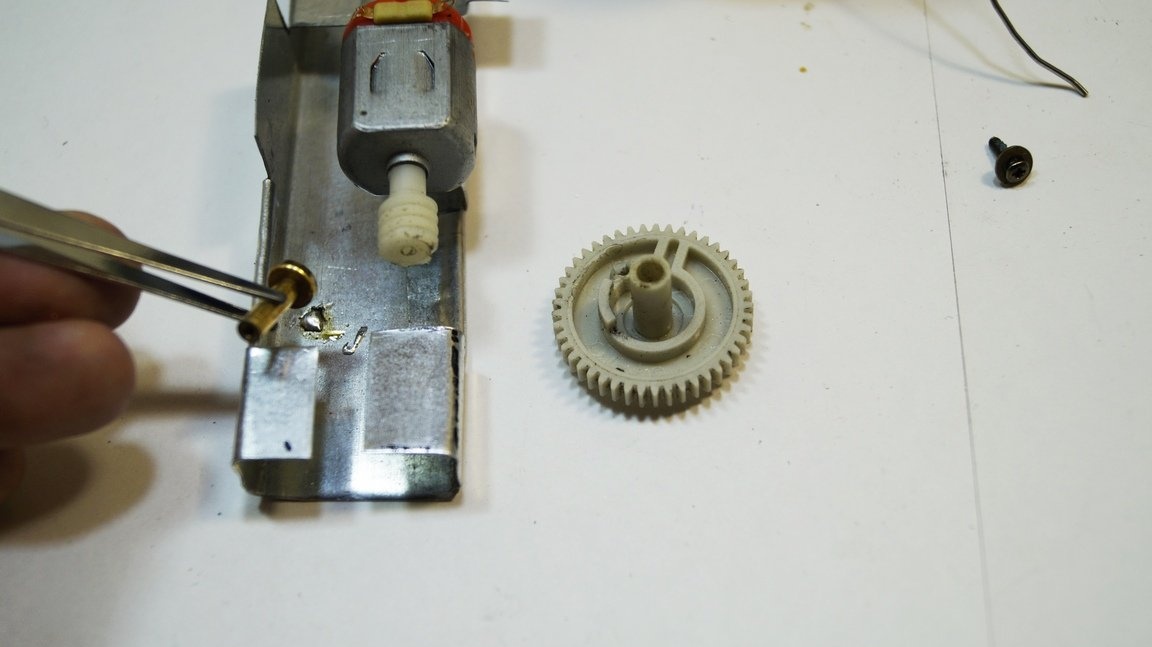
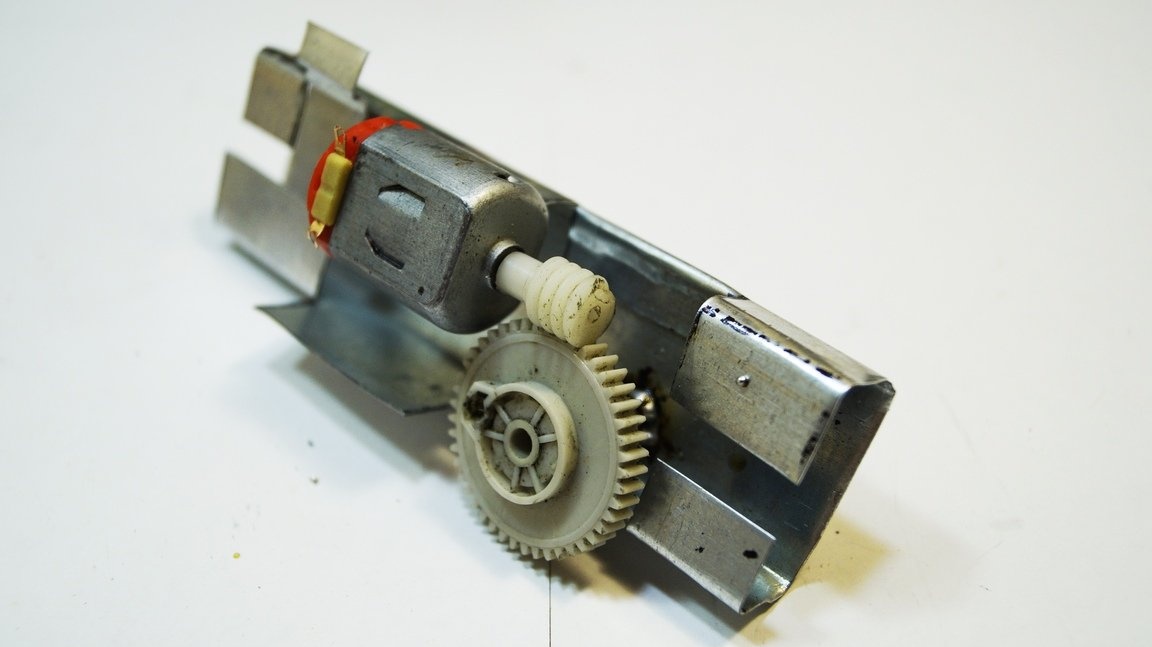
Sätta tillbaka elmotorn. Vi lödar vevaxeln på plats, detta görs experimentellt. Snäckväxeln ska vara väl monterade, växlarna ska inte vara sneda. Foto 10.11.
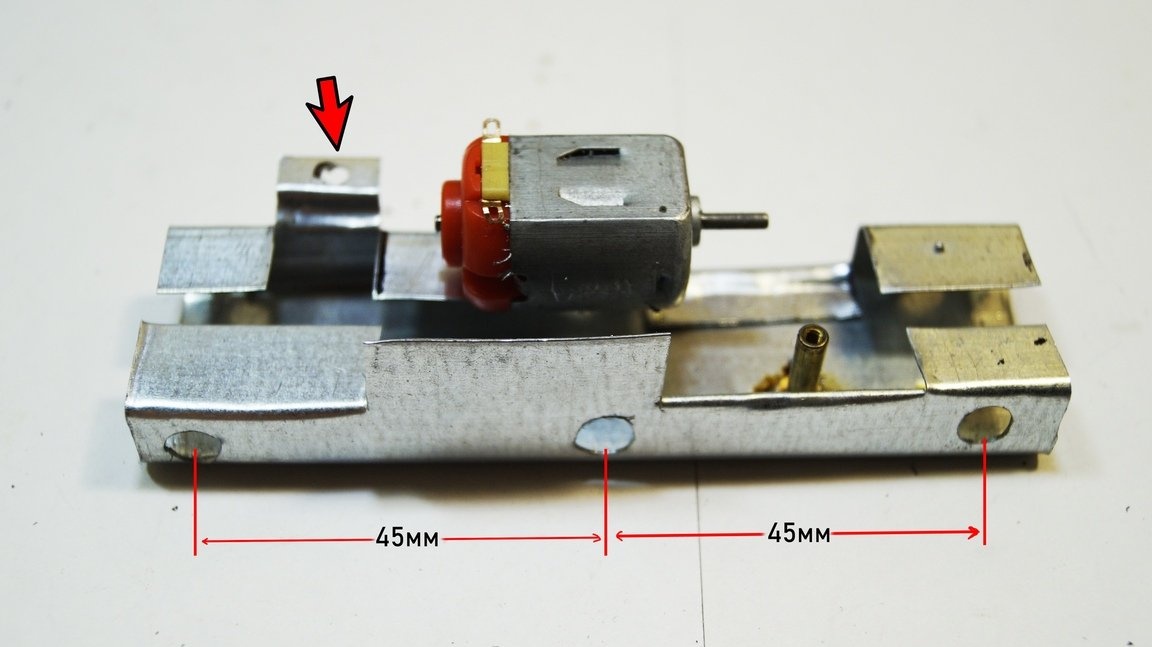
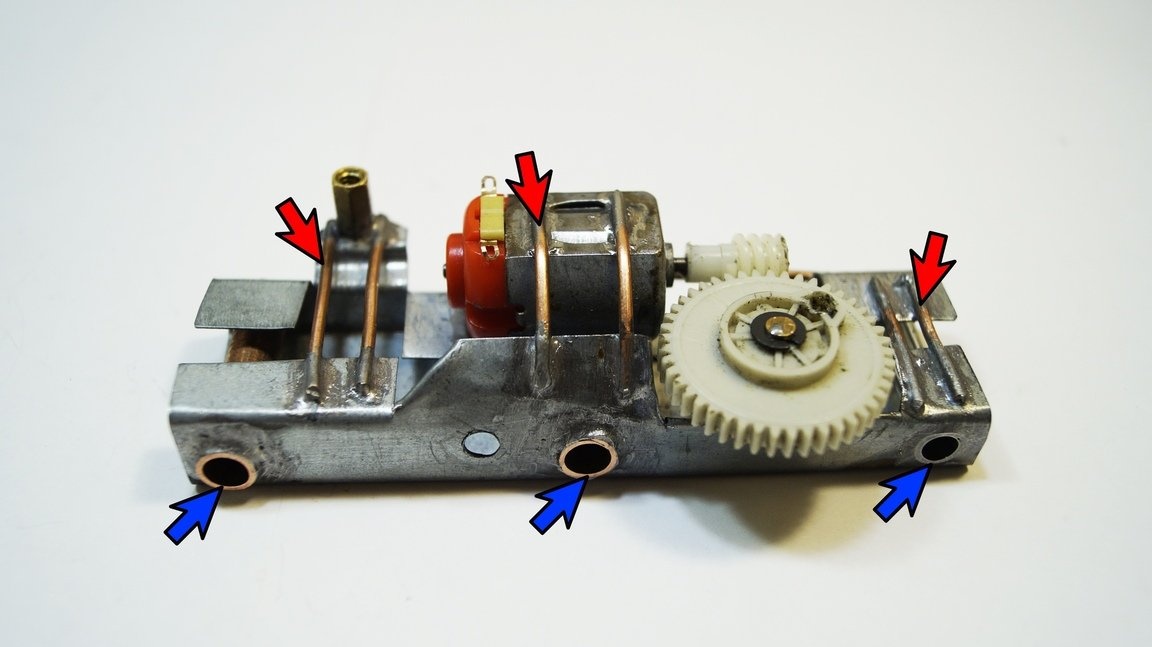
3. Hål för benen på en kackerlacka.
För att fästa kackerlackotassarna på ramen måste du borra hål med en 8 mm borr. Vi borrar ett hål i örat bakom elmotorn med en 3,2 mm borr
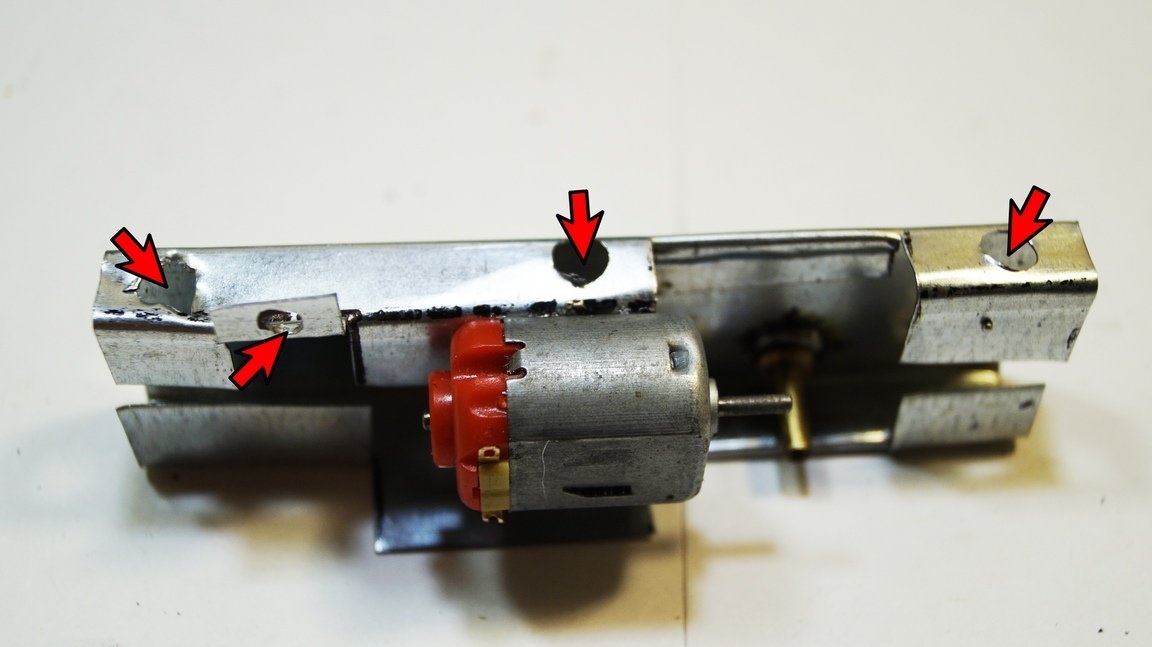
Vi löd också en mutter i örat bakom elmotorn. Spaken som är ansvarig för att lyfta de mittre tassarna längs den vertikala axeln kommer att fästas på denna mutter
För att stärka ramkonstruktionen löddes förstyvningar med en 2,5 mm koppartråd.
8 mm bussningar löddes också till fästpunkterna för kackerlackotassarna Foto 15.
4. Tassar på en kackerlacka.
En metalltråd med en diameter på 3 mm användes som kackerlackotassar, den lödas till huvudet på M6-bult. Foto 16. Det mellersta paret av kackerlackatassar görs annorlunda, ett hål borras i bulthuvudet längs trådens diameter. Tråden är böjd i form av bokstaven “S”, vilket gör att kackerlackans ben kan röra sig vertikalt.
Foto 16.
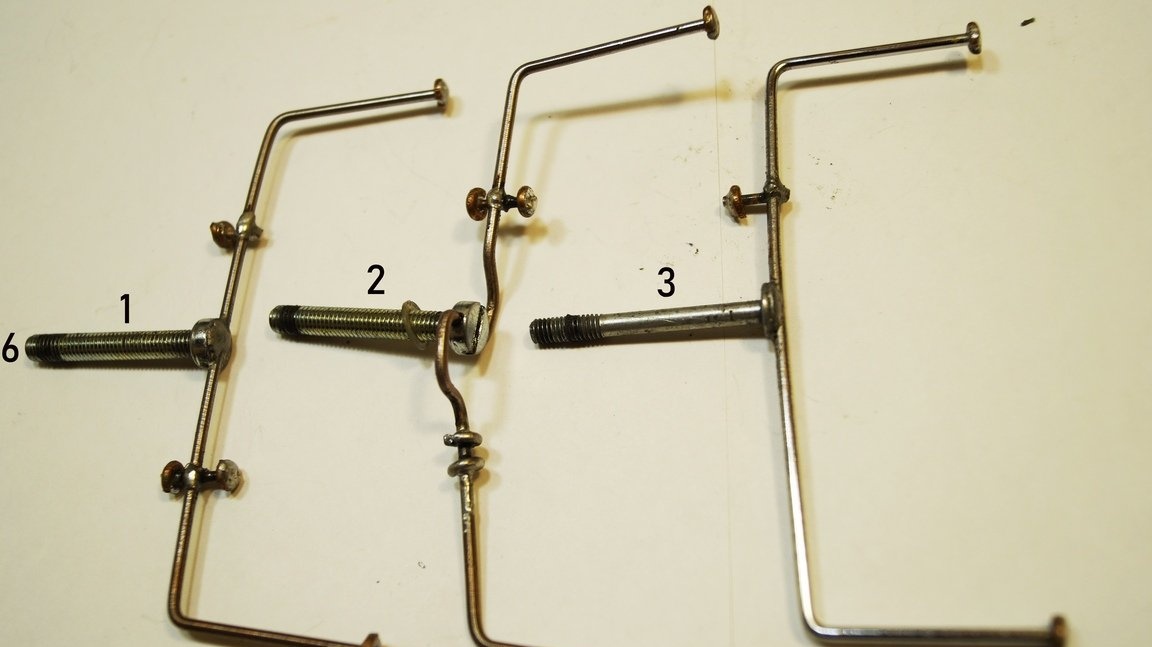
Foto 17.

För att fästa stavarna lödas en koppartråd med en 2,5 mm lång sektion 12 mm lång till kackerlackans tassar, kopparringar lödas till dess ändar. Stängerna är gjorda av koppartråd med ett tvärsnitt på 2,5 mm, måtten är ungefärliga, det är tillrådligt att böja tråden så att det i framtiden finns möjlighet att justera längden på Foto 18.
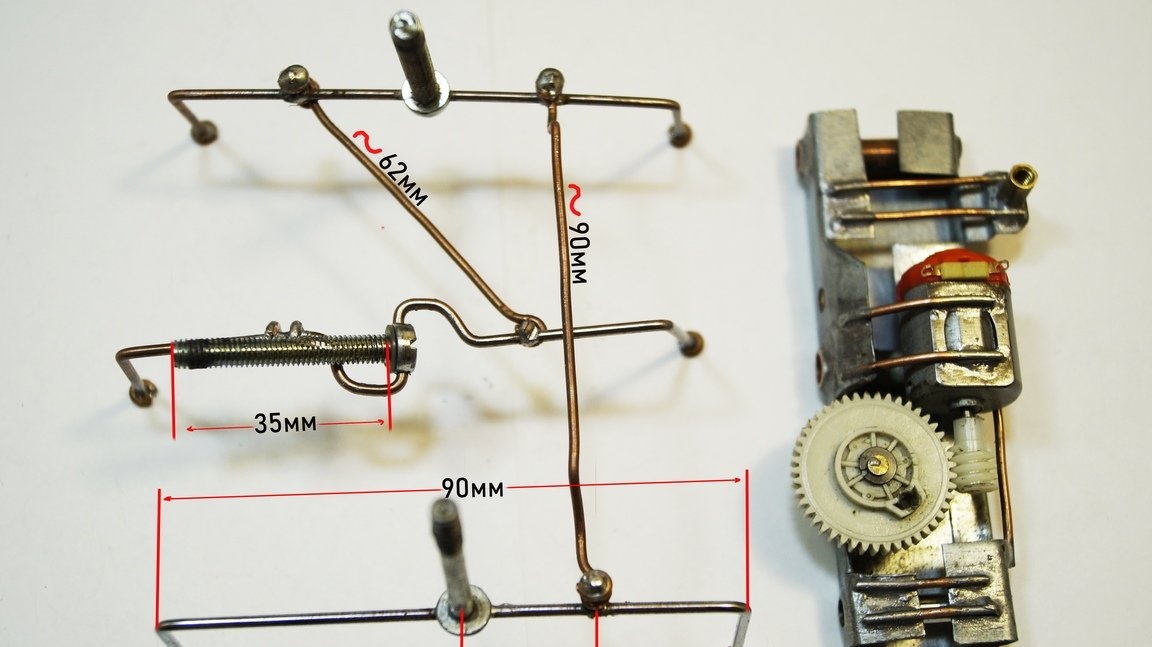
Foto 19 visar en vy nedifrån med tassar monterade på ramen.
Vi upprättar dragkraft från vevmekanismen till kackerlackans framben. Vi gör ett tryckkraft med en nedkant för förmågan att justera den. Vevradie 8mm Foto 20.
Vi gör en spak för att flytta de mellersta tassarna vertikalt från koppartråd Foto 21.22.
Detta fullbordar den mekaniska delen av kackerlackan.
Foto 21.

Foto 22. Tassarnas placering i vevaxelns nedre läge visas.
Foto 22.

5. Den elektriska delen.
Limma batterifacket på en dubbelsidig tejp på kackerlackaramen. Limma på strömbrytaren på batterifacket. Vi lödar alla element i Foto 23.
Roboten - kackerlackan är klar !!!