


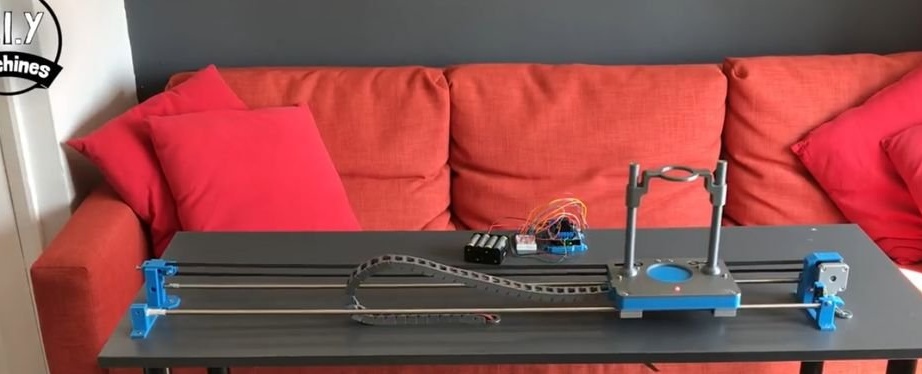
I den här artikeln kommer guiden att berätta hur han skapade en robotbartender kontrollerad av en smartphone.
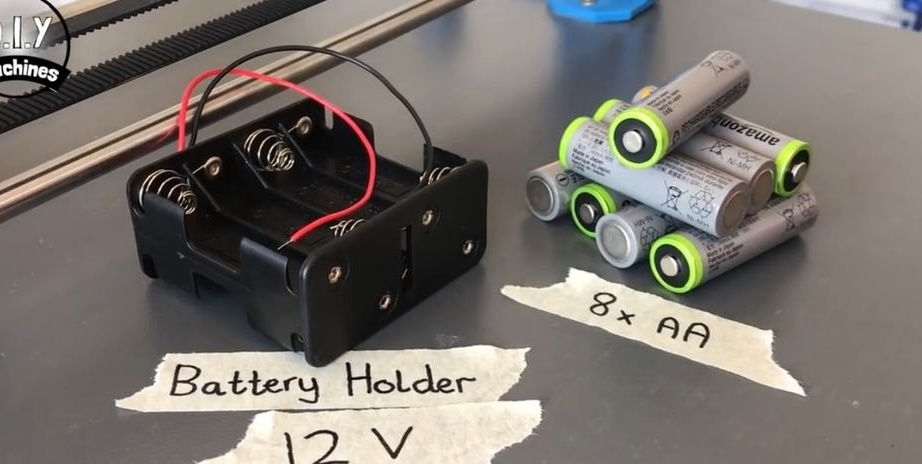
Enhetens funktioner: arbete på Arduino, överkomligt pris, Bluetooth-kontroll från alla apparater, autonomi (arbete med 8 AA-batterier).
För att bygga en sådan enhet använde befälhavaren följande
Material och verktyg:
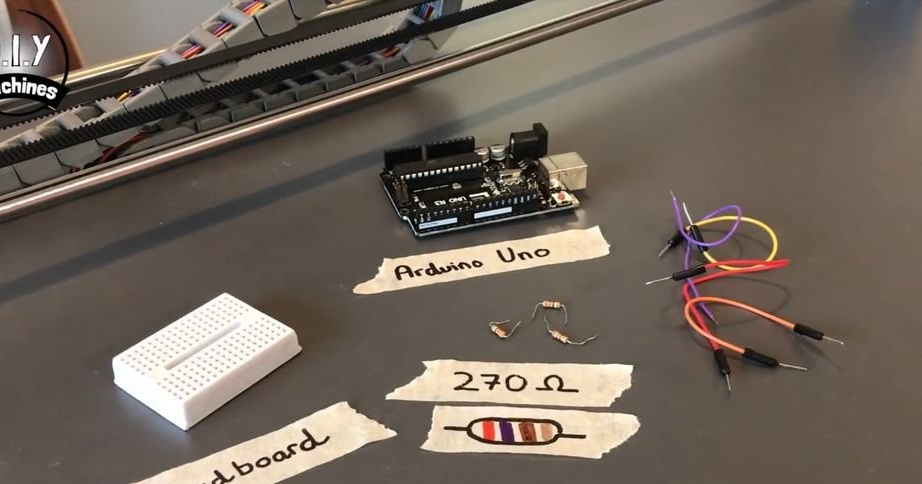
-Arduino uno;
-Drivmotor L293D;
- kontaktomkopplare;
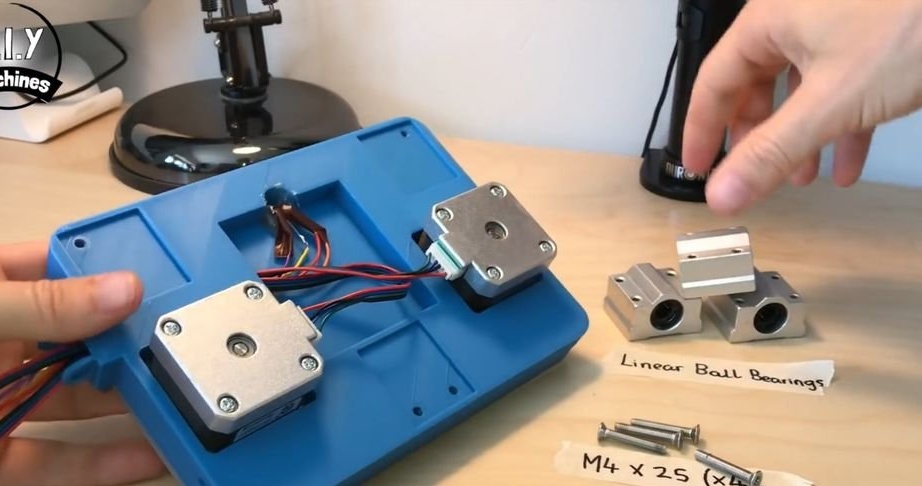
-Linära lager;
-Stappmotor;
-Bälte och remskiva (version 2m);
-Bälte och remskiva (version 5m);
-HM10 Bluetooth-modul;
-En skruvmejsel;
-Krepezh;
-Nozhki;
-Tabell topp;
-3D-skrivare;
-Metallstänger;
- skruvmejsel;
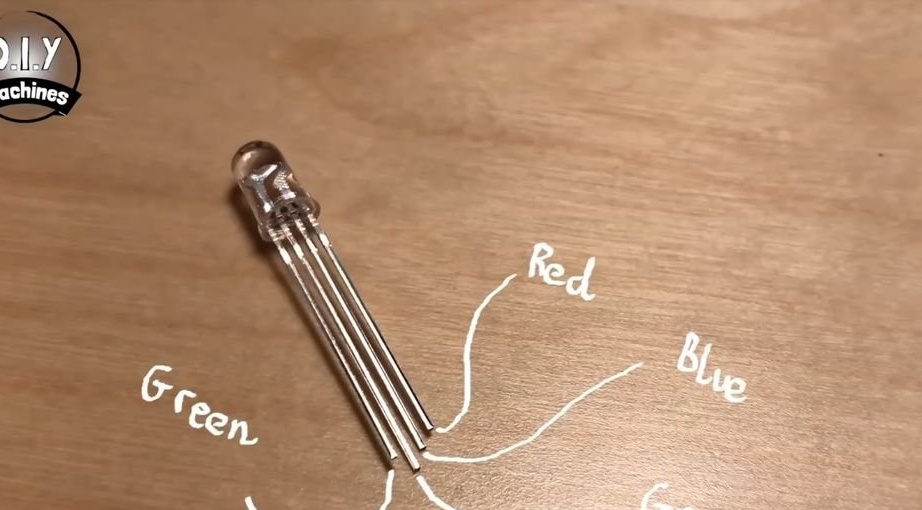
- RGB LED;
seeing-;
-Lödningstillbehör;
-Izolenta;
-Pistolen;
-Batterifack;
-Konnektory;
Knappcellsbatterier;
-Dator med mjukvara;
- Hållare för flaskor;
-Den ventil;
-Flaska;
Steg ett: tabellen
Först samlar befälhavaren bordet. Bordstorlek 120 * 45 cm. Skivbordets tjocklek 18 mm.


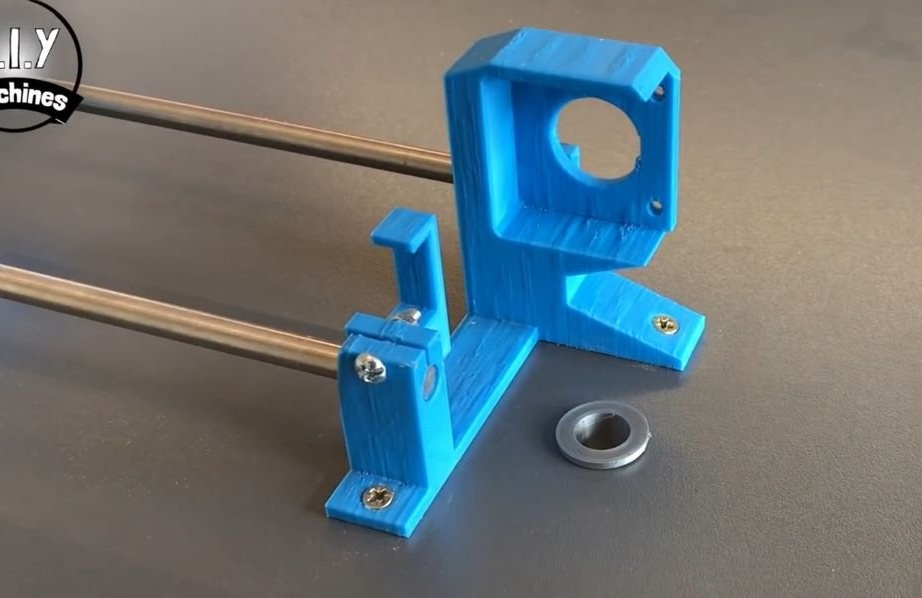
Steg två: Spännare
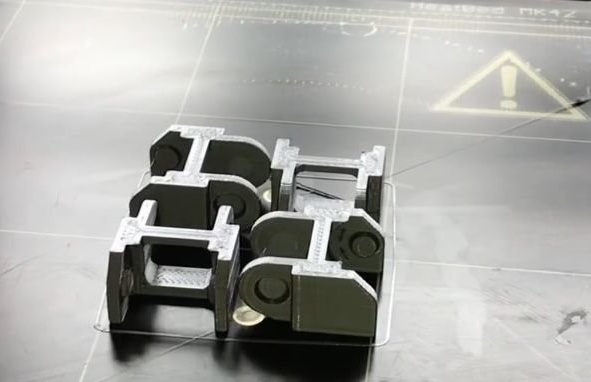
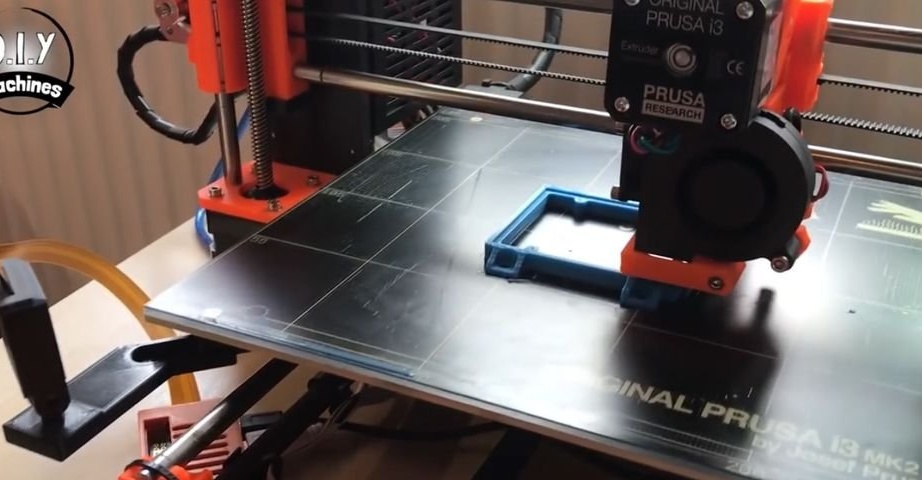
Filer för utskrift av delar kan laddas ner nedan.
3D-utskriftsfiler.
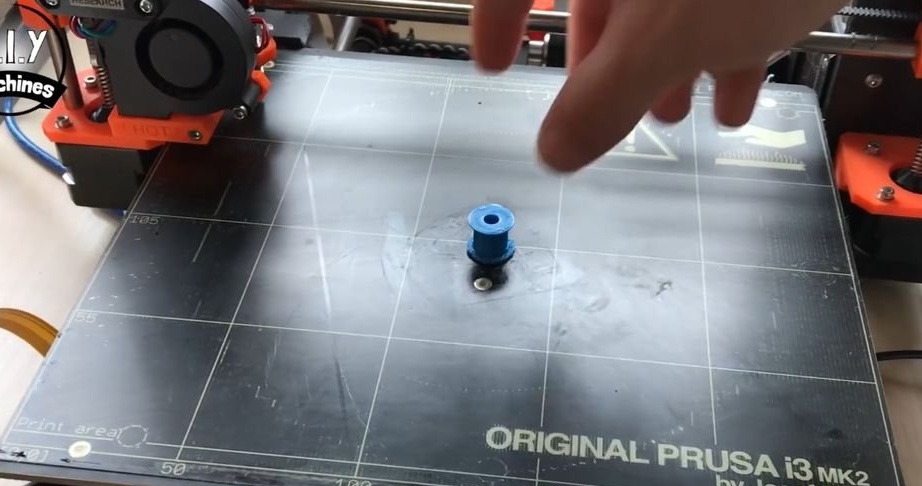
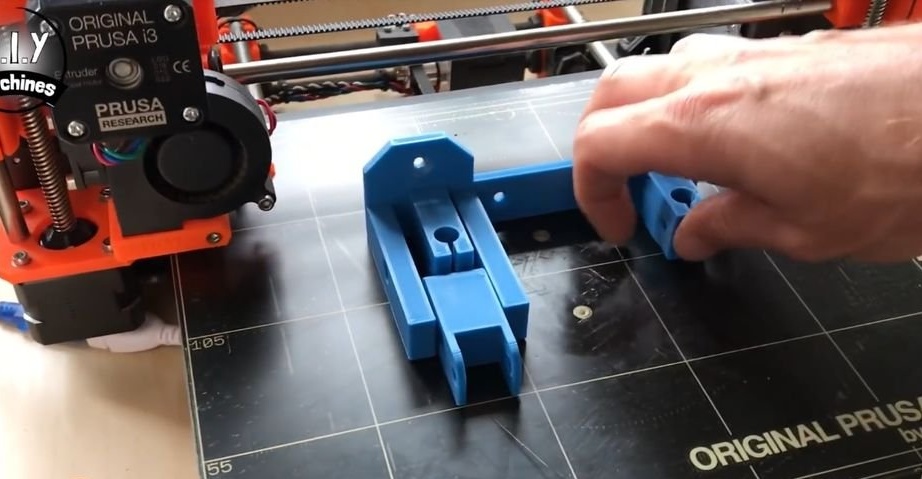
Nu kommer det att vara nödvändigt att skriva ut de två första detaljerna "idler.stl" och "Rod_Clamp_V5.stl".
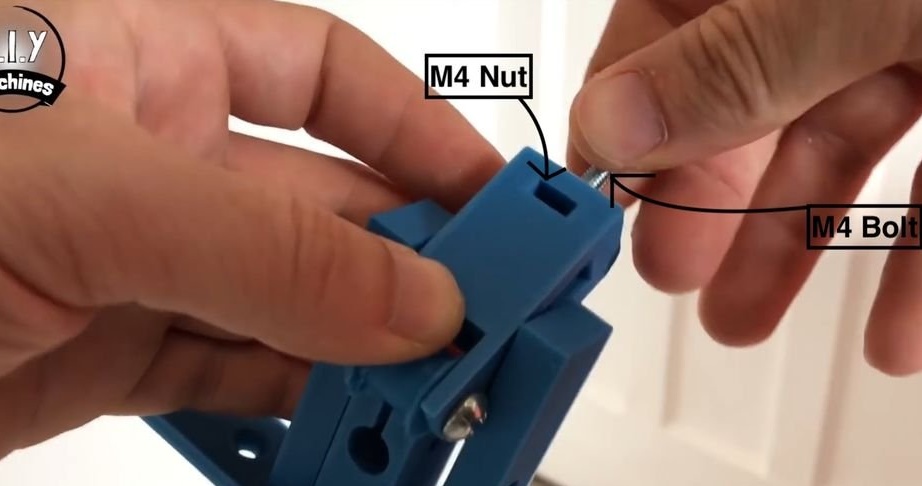
Efter tryckning är det nödvändigt att fästa spännrullen på spindelklämman med en lång M4-bult och mutter. Stark fastspänning är inte nödvändig, eftersom rullen måste rotera fritt.
Sedan fästs de två delarna ihop.
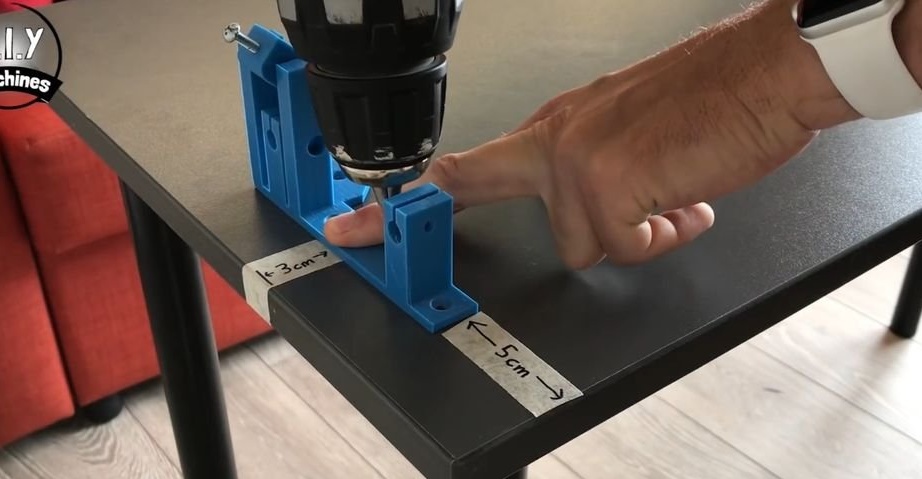
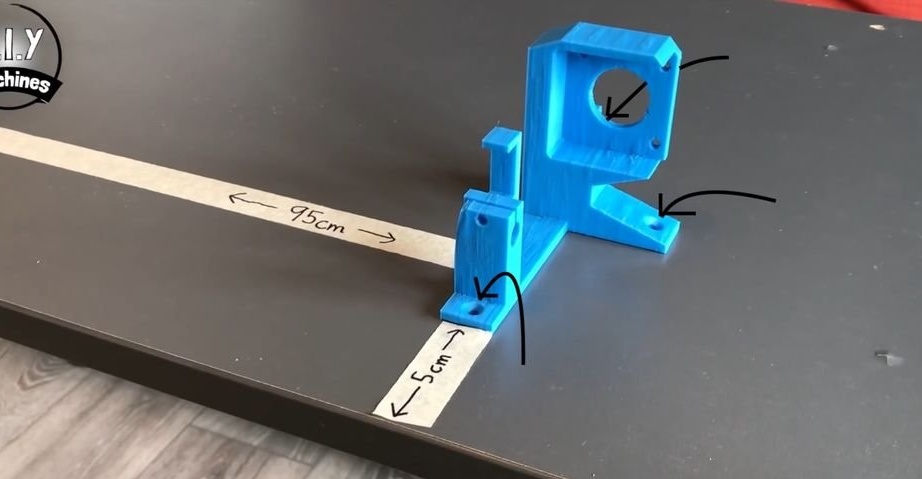
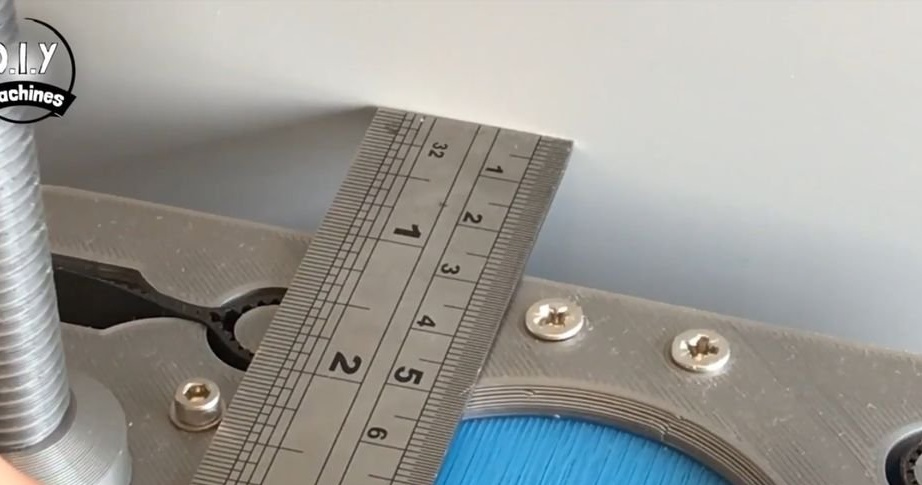
Markerar på ett bord 3 cm från den vänstra korta änden och 5 cm från framkanten och drar åt sträckaren.

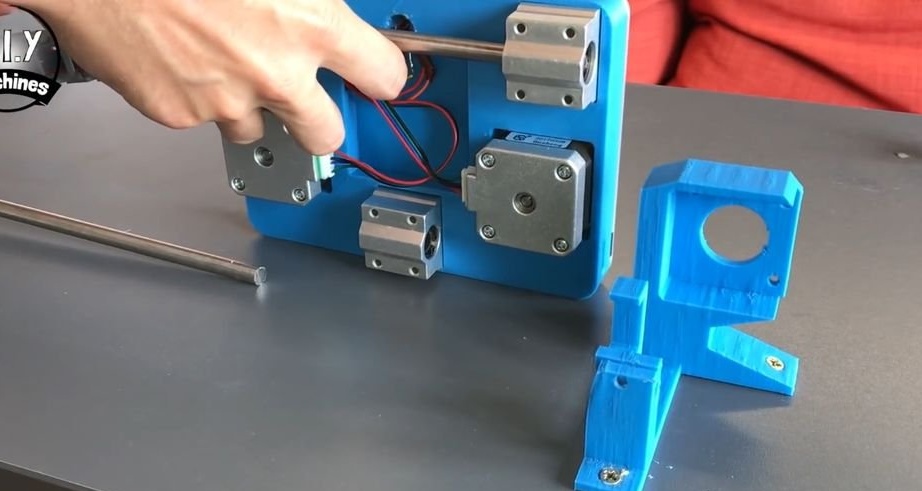
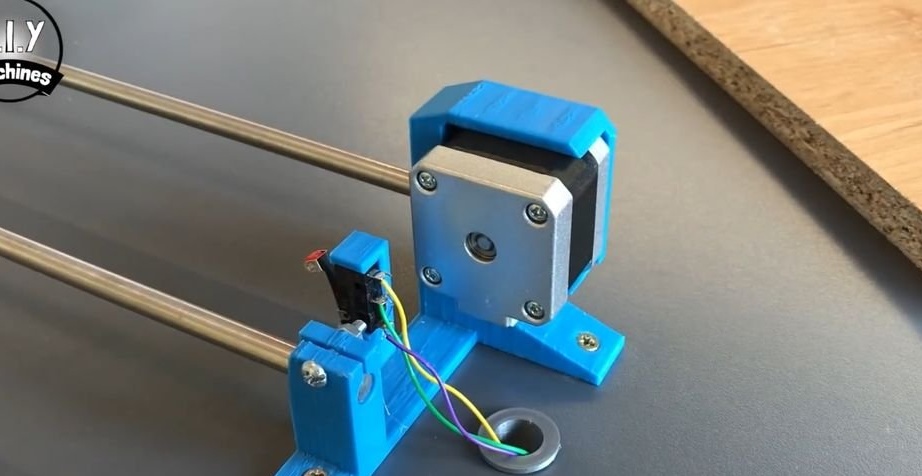
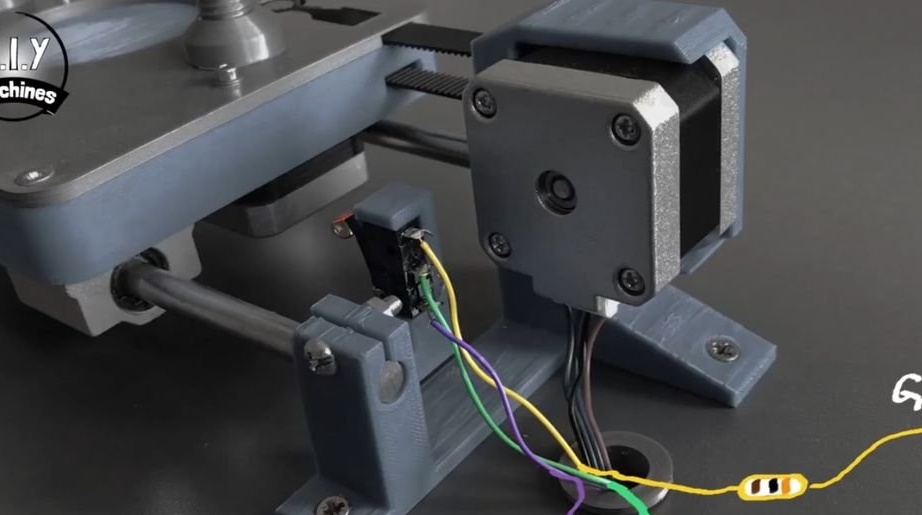
Steg två: Motormontering
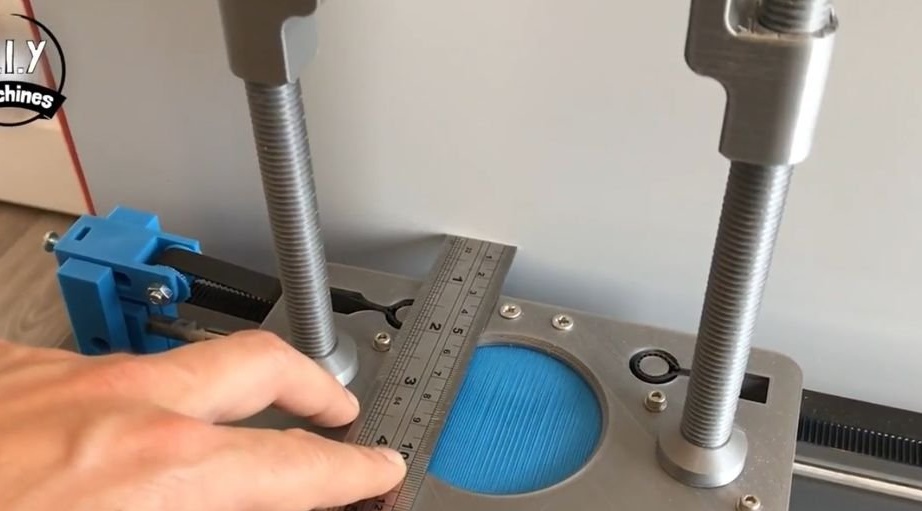
Skriver ut motorfästet, filen "X_Axis_Motor_Mount.stl". Fästs på bordsskivan på ett avstånd av 95 cm från sträckaren och 5 cm från bordets kant.
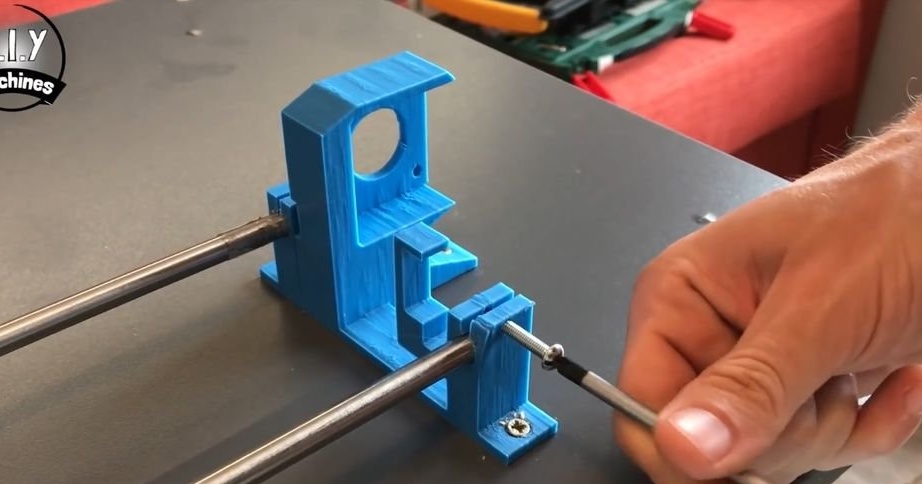
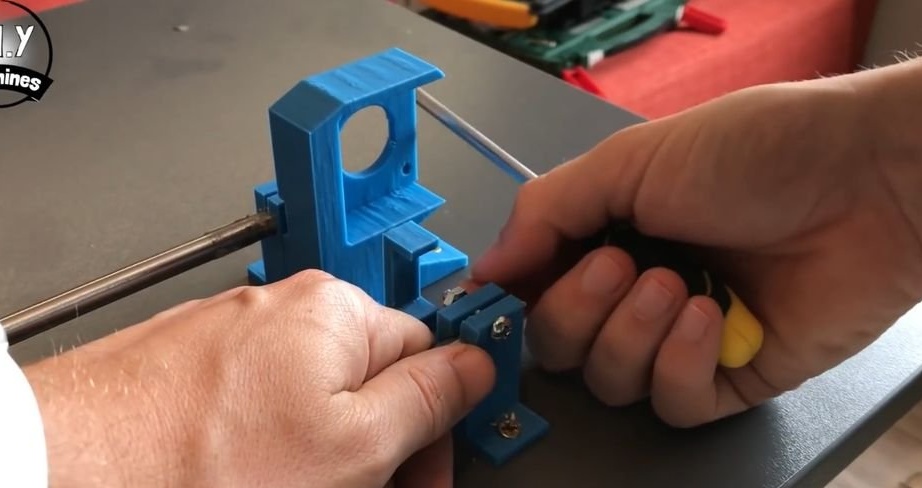
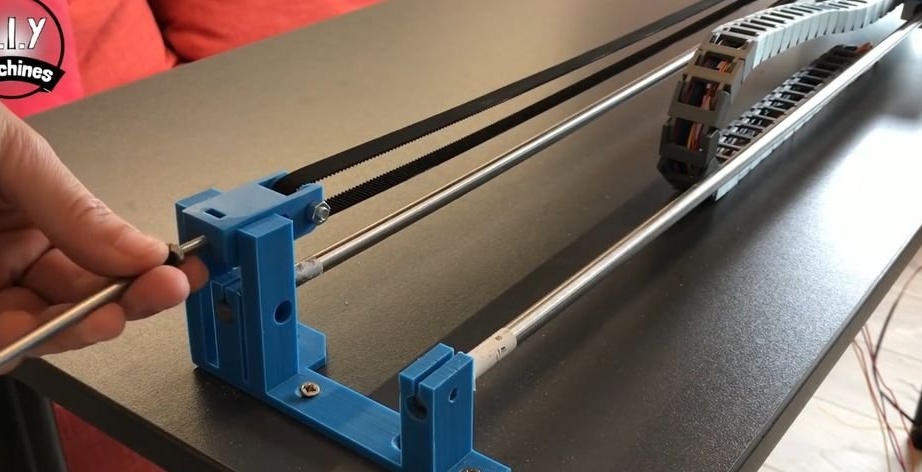
Steg tre: Guider
Ställer guider. Längden på stavarna är 1 meter.
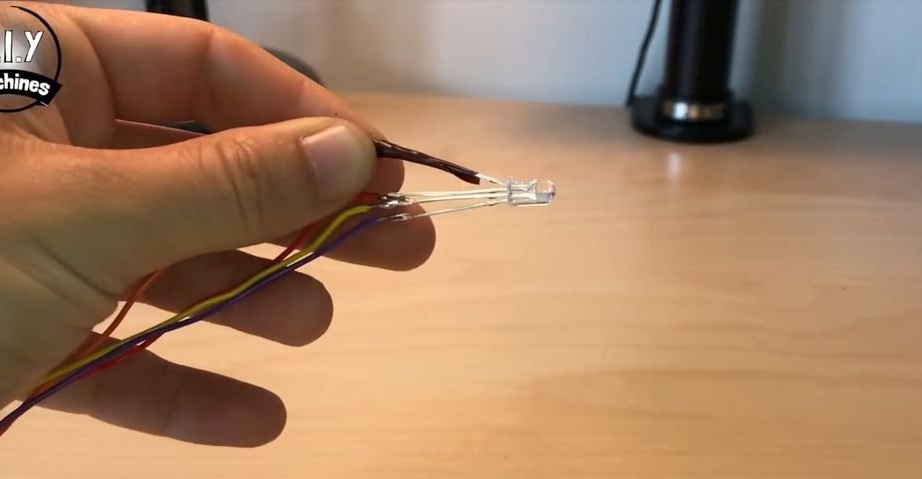
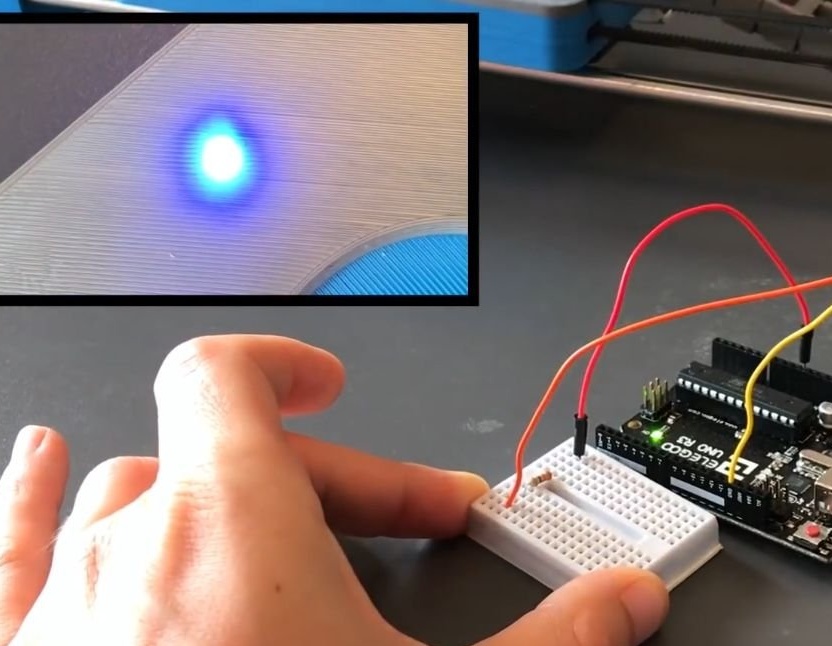
Steg fyra: LED
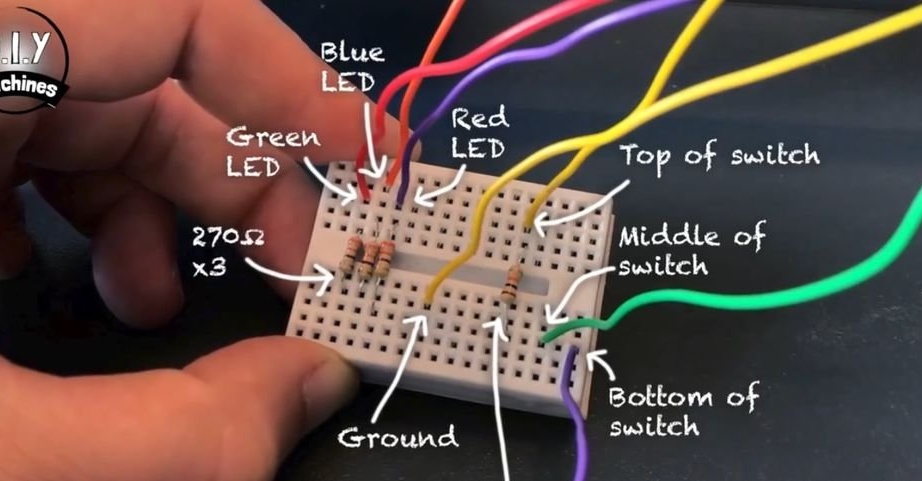
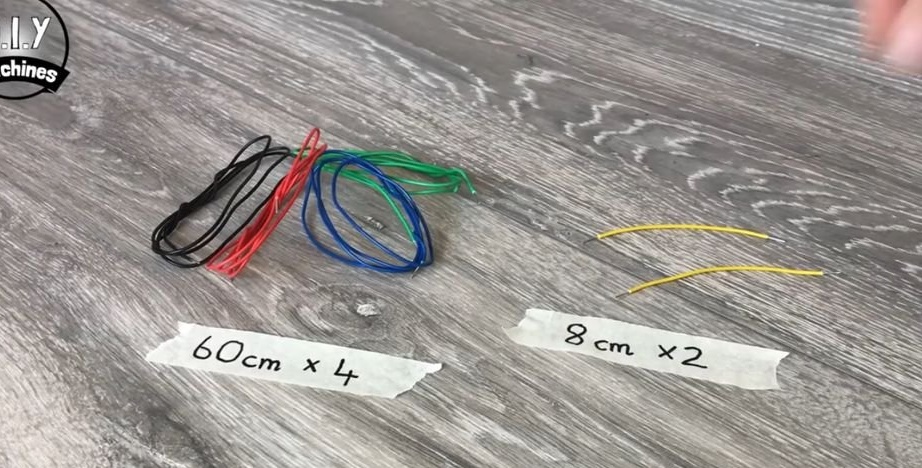
Befälhavaren kommer att använda RGB-LED för indikering. Löd 180 cm trådar i olika färger till varje ben. Korsningen isolerar.




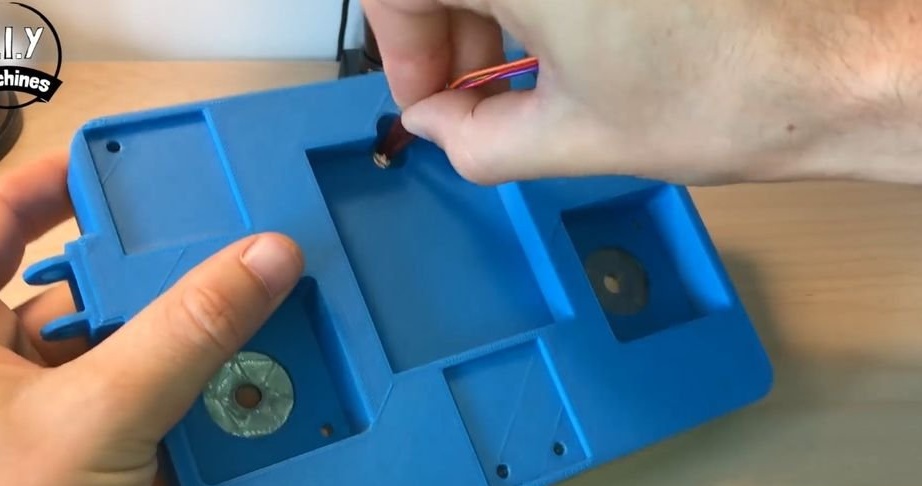
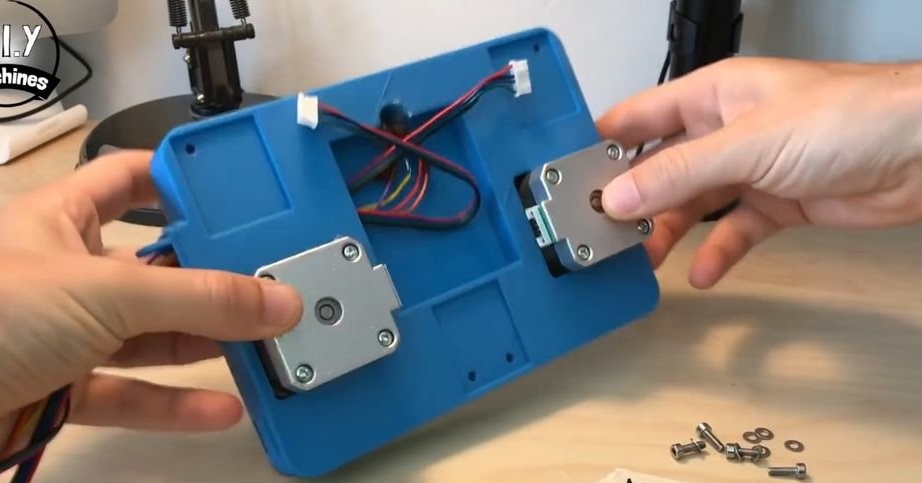
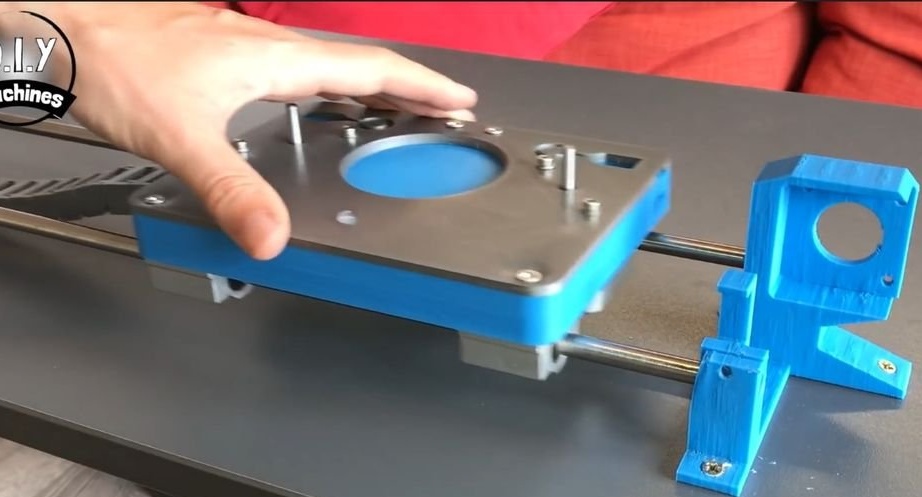
Steg fem: plattform
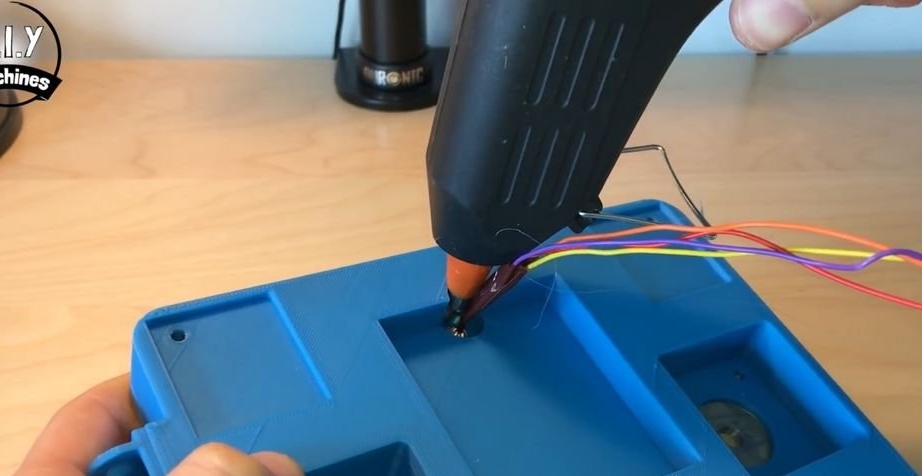
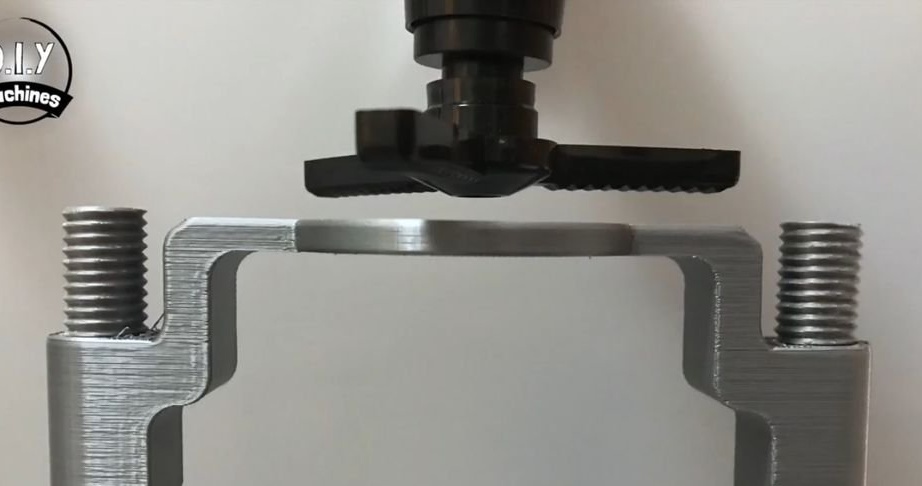
Skriver ut delen 'slider_base_v3.stl'. Fixar en LED. Installerar stegmotorer.
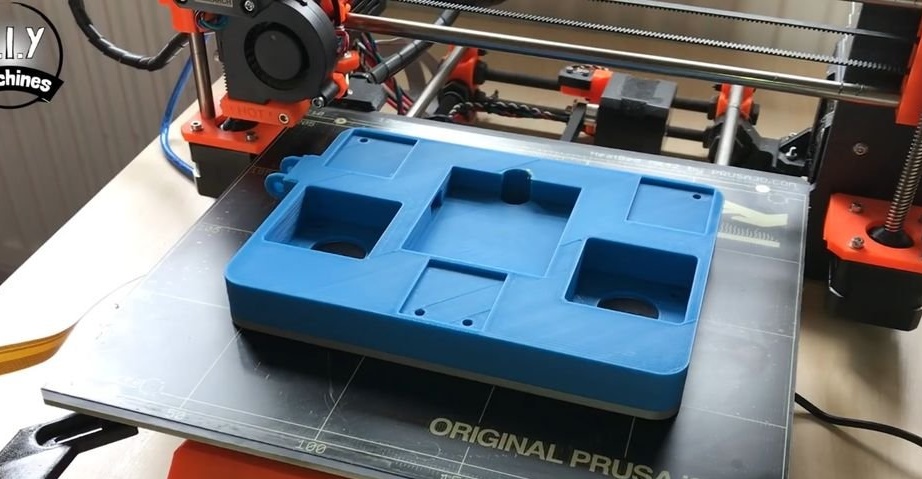

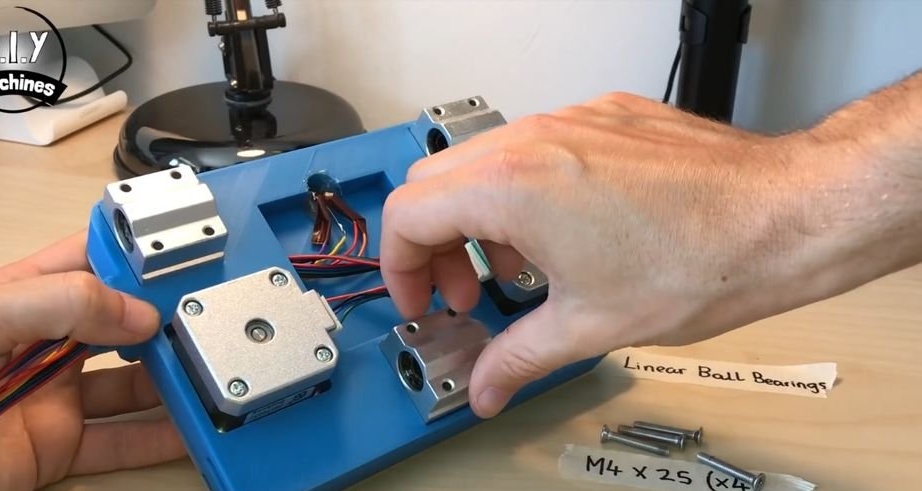
Installerar linjära lager.
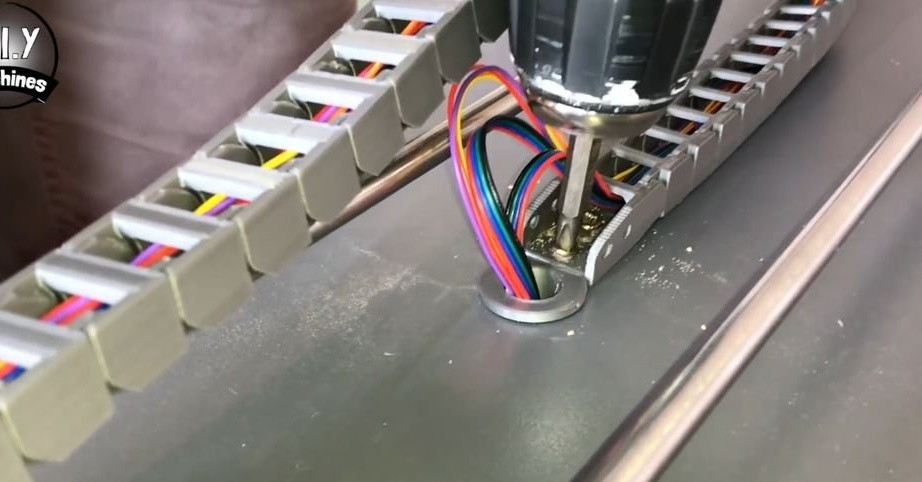
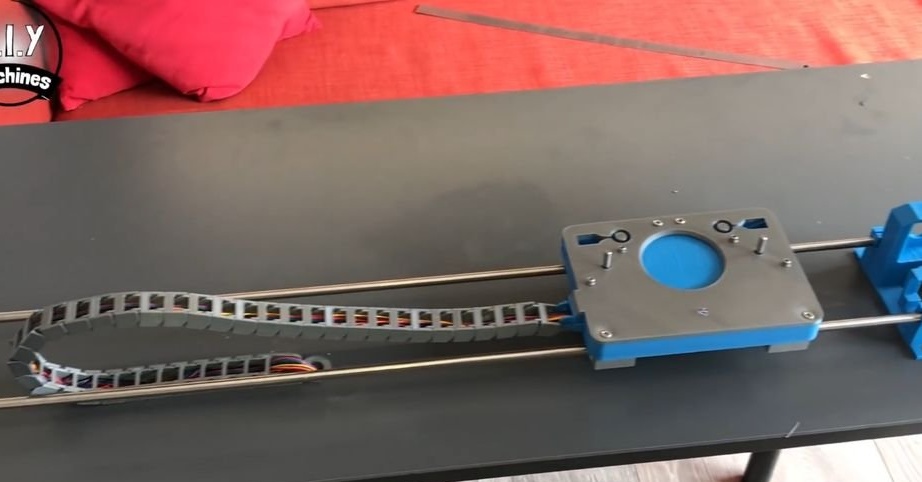
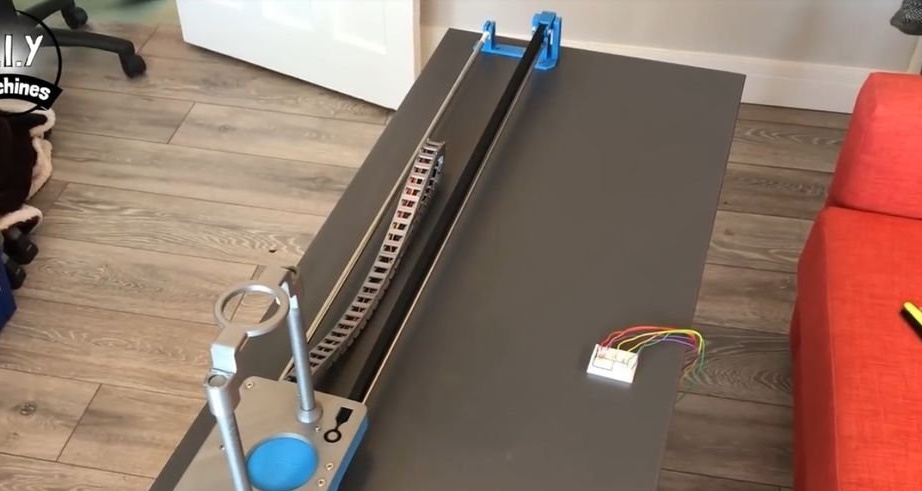
Steg sex: Kabelkanal
Kabelskanalen för enheten består av separata segment anslutna i en enda krets.Inuti kretsen läggs ledningar. Kedjan är rörlig och böjer vid behov. Kedjesegment skrivs också ut på skrivaren.


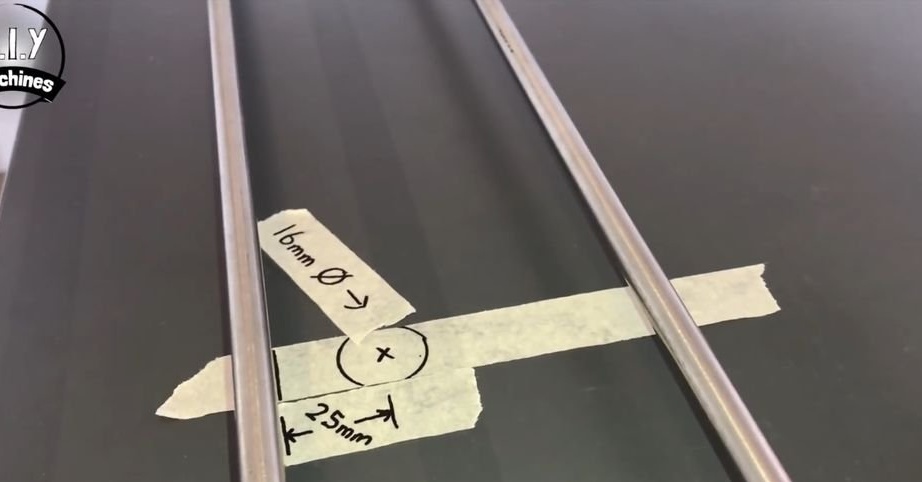
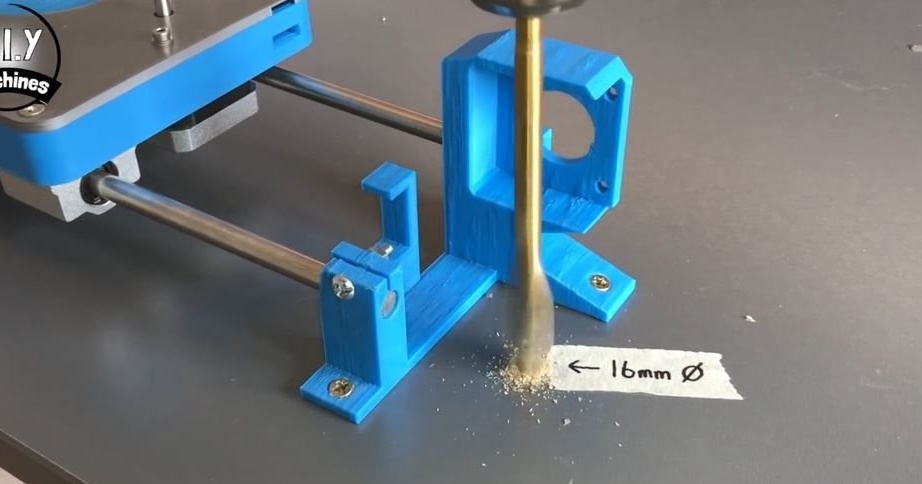
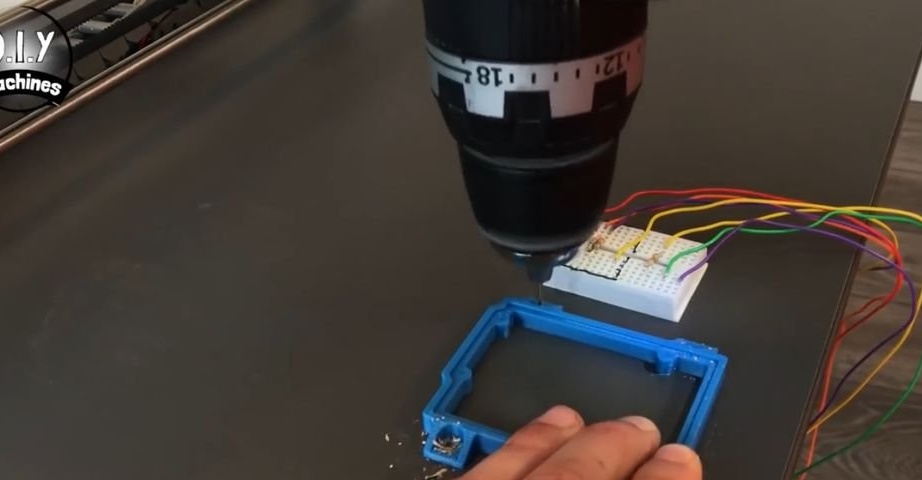
Borra ett hål på 16 mm på ett avstånd av 25 mm från ytterledaren och 47 cm från sträckaren. Sätt i hylsan "Table_Tidy.STL" i hålet. Fäst kabelkanalen ena änden på plattformen, den andra på bänkskivan bredvid hylsan. Sträcker ledningar.



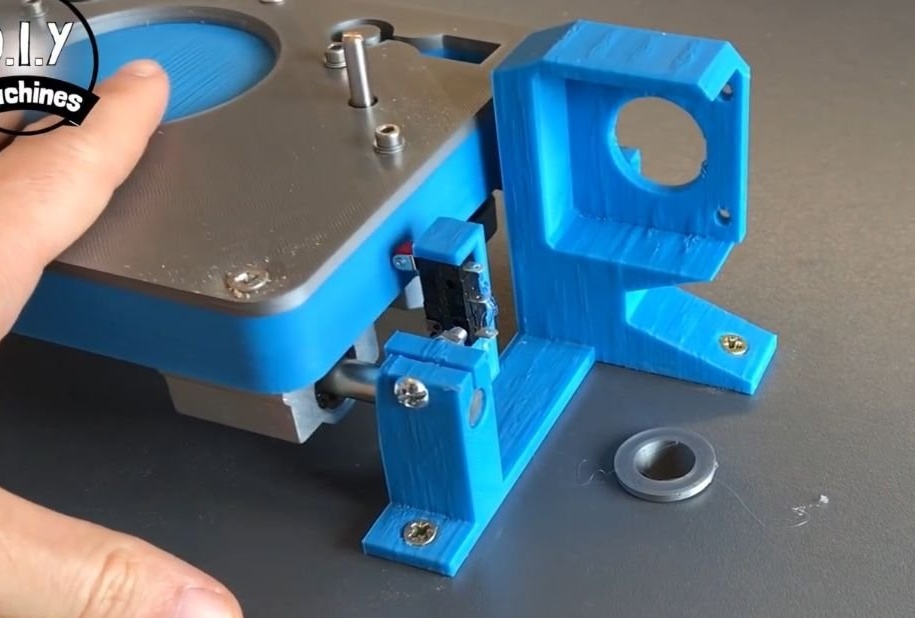
Sjunde steget: växla
Bredvid motorfästet borras ytterligare ett 16 mm hål. Sätt i en hylsa i den. Fäst trailern på fästet. Löd till sina kontakter för 1 meter tråd.

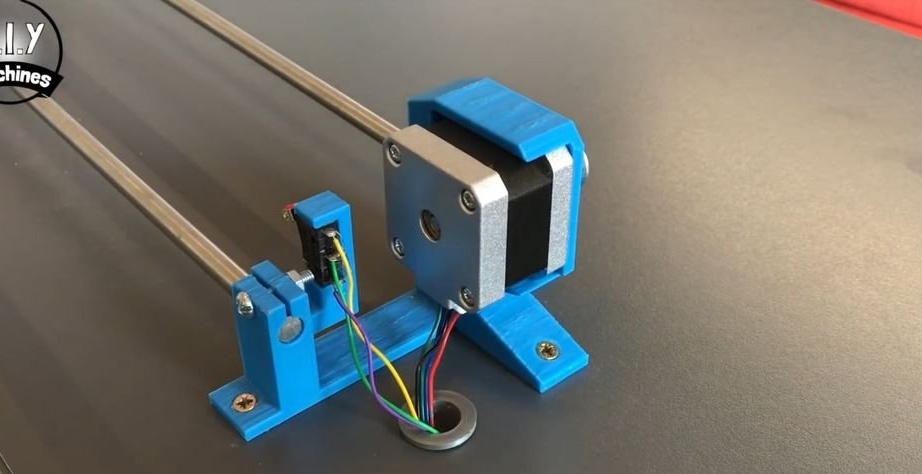
Steg åtta: X-axel motor
Säkrar motorn att montera.

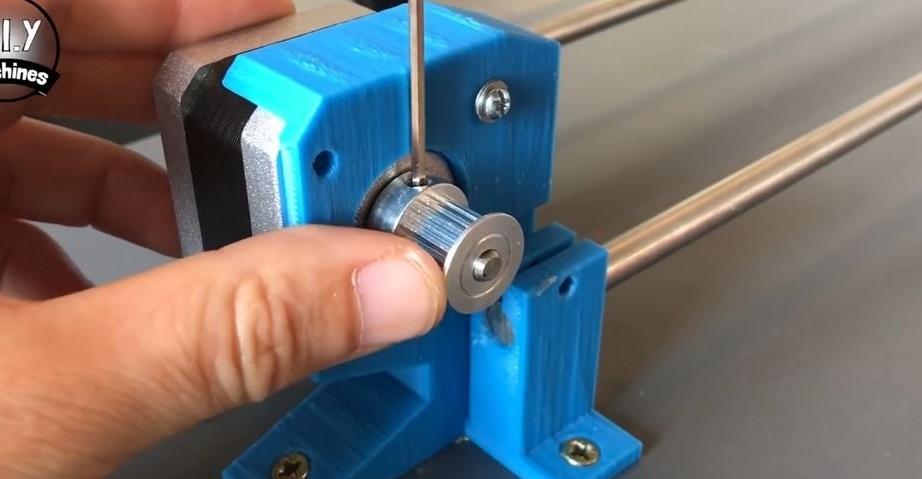
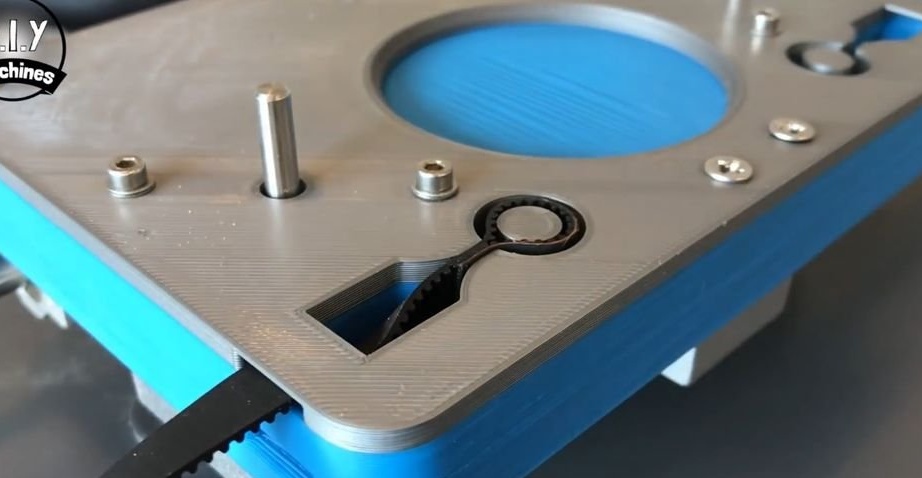
Steg nio: bälte
Fäst remskivan på motoraxeln. Fäst bältets ände på plattformshållarna. Drar bältet genom remskivan och genom spännrullen. Fäst den andra änden till hållarna. Om nödvändigt kan remspänningen justeras genom att dra åt eller skruva loss skruven.







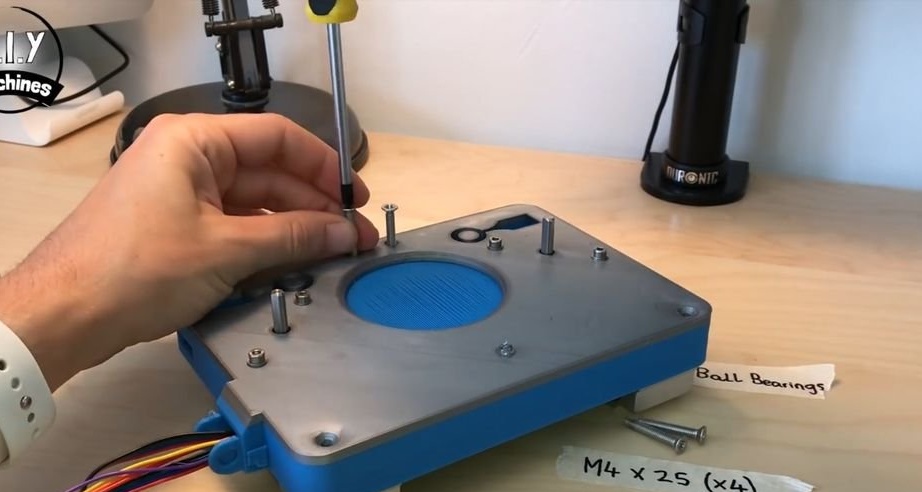
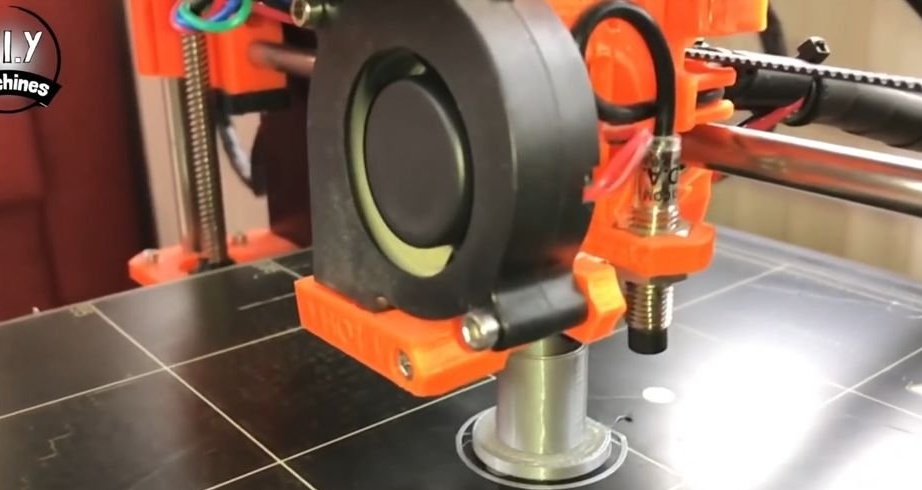
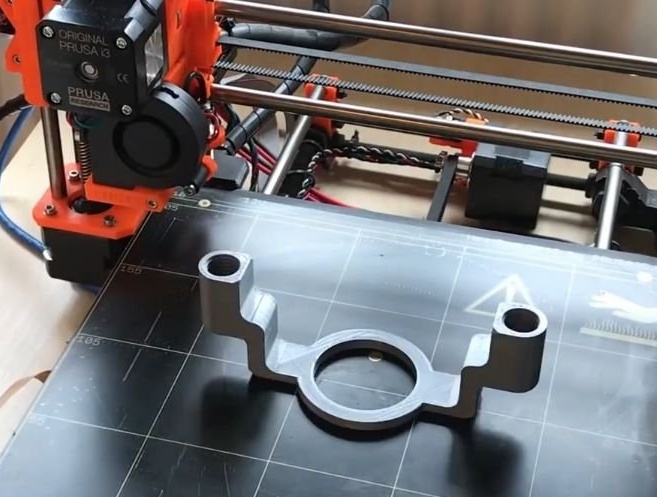
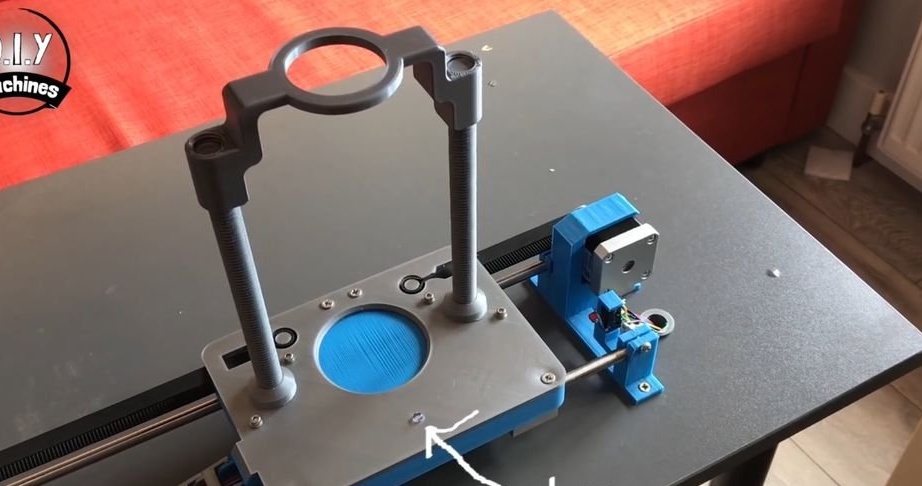
Steg tio: kopphållare
Skriver ut två gängade stavar main_rod2.3.STL och hållare Dispenser_Paddle_V2.STL. Fästs på en plattform.



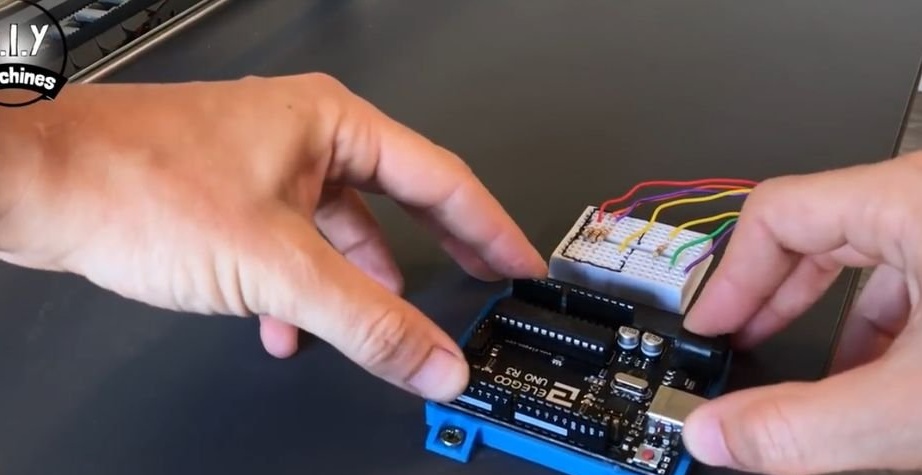
Steg elva: indikator, släpvagn, brödskiva
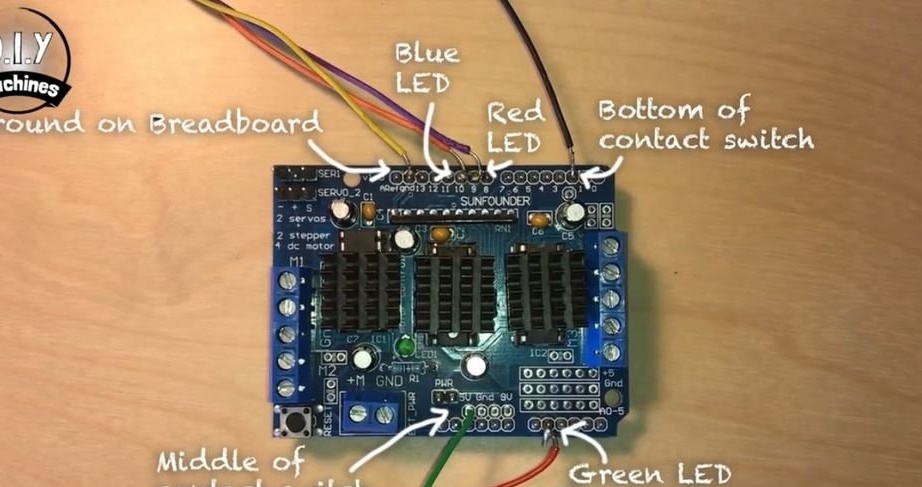
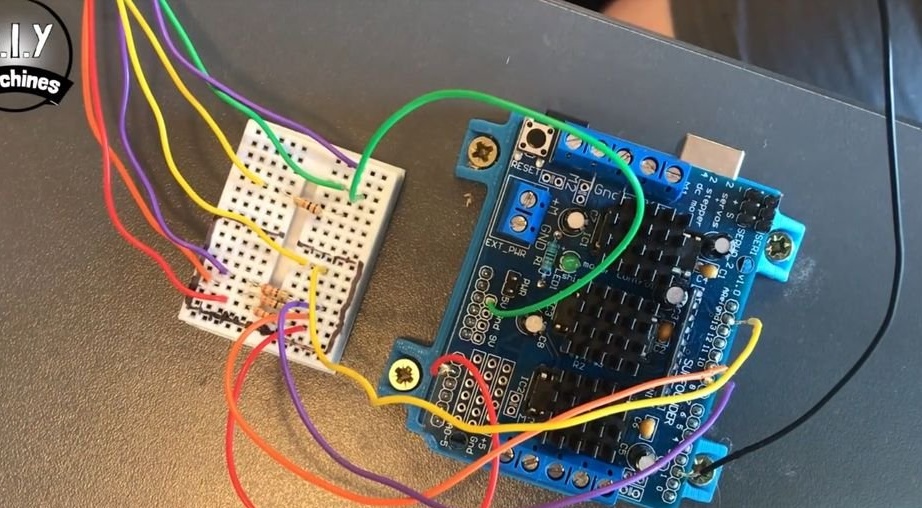
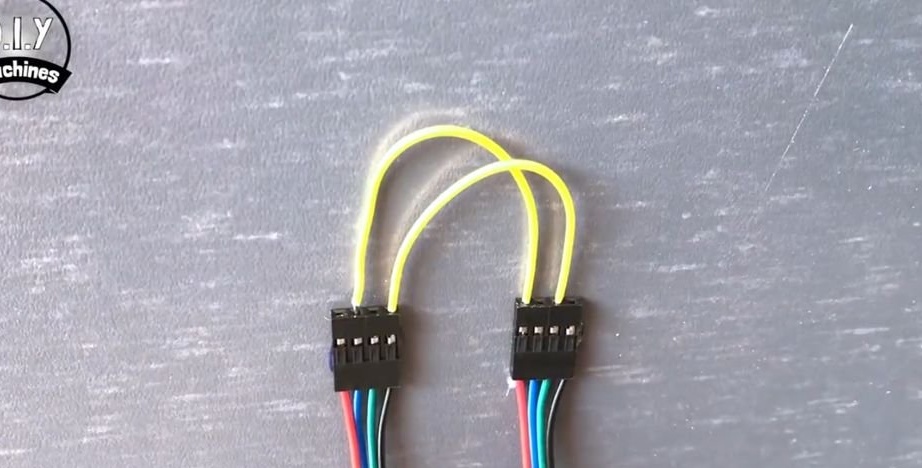
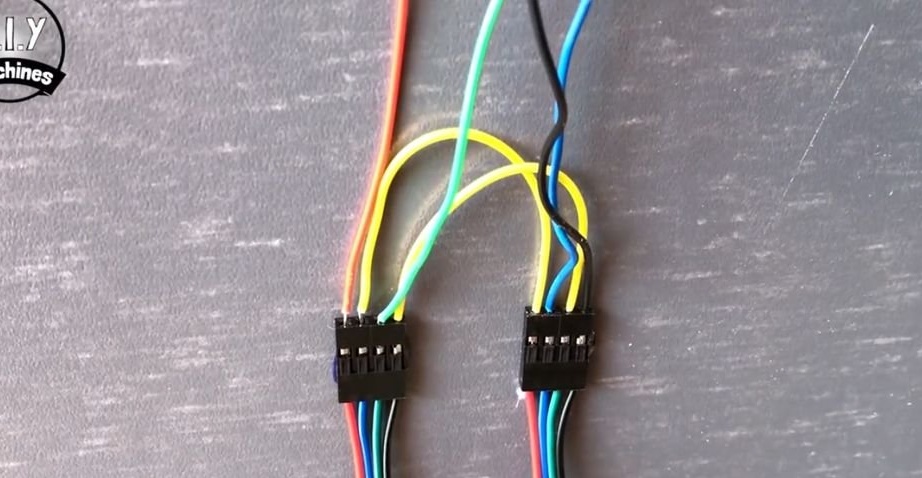
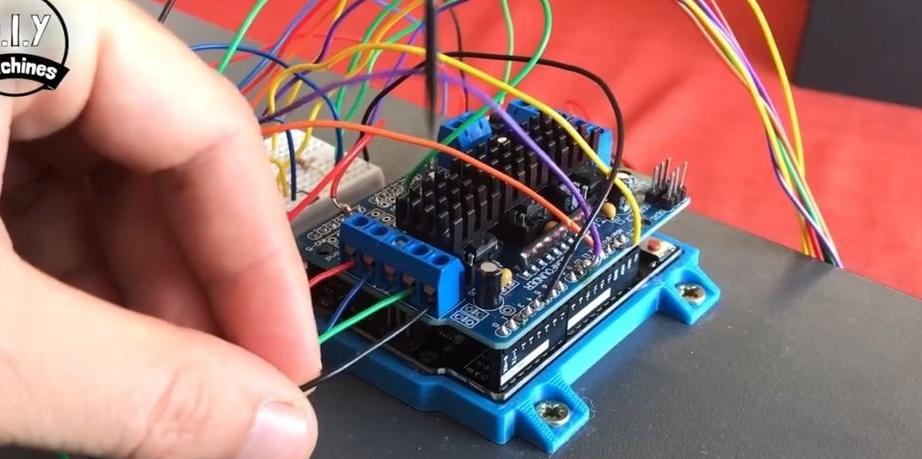
RGB LED, har fyra ben. Ett ben är vanligt och tre i färg. Befälhavaren tar ytterligare fyra ledningar, var och en cirka 15 cm långa, och säljer dem enligt följande (med LED-glödets färger) till motordrivmodulen:
Röd till stift D9
Blå till stift D10
Grön för stift A1
Katoden till GND-stiftet.
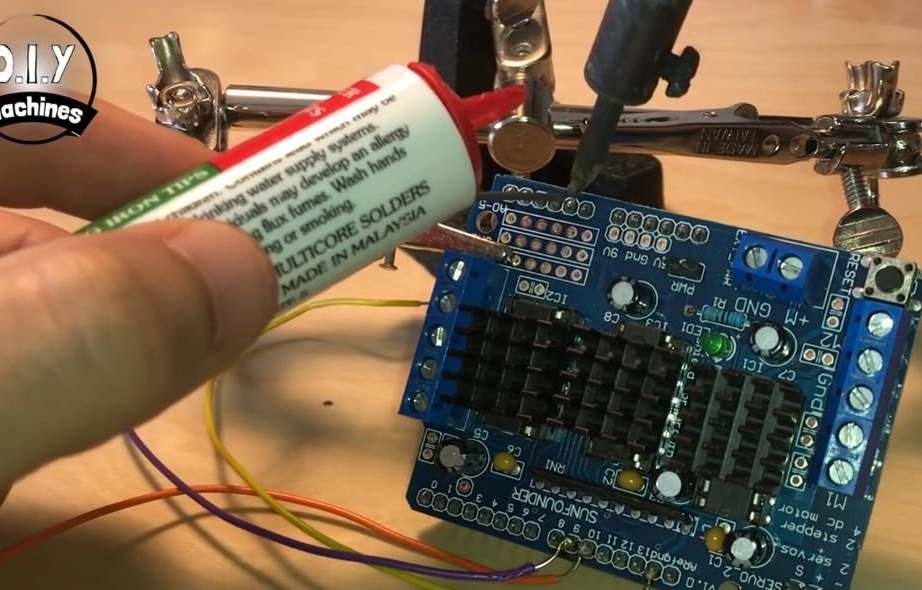
Den ansluter trailern: den övre kontakten är GND, den mellersta kontakten är 5 V, den nedre kontakten är utgång nr 2.
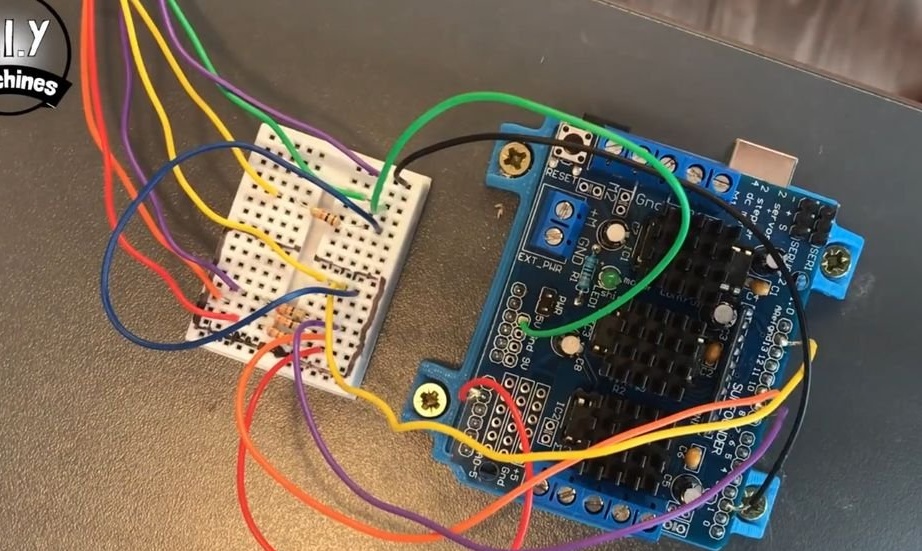
Därefter monteras allt på en brädskiva (se bild). Fäster brädet vid bordet.
Steg tolv: Arduino
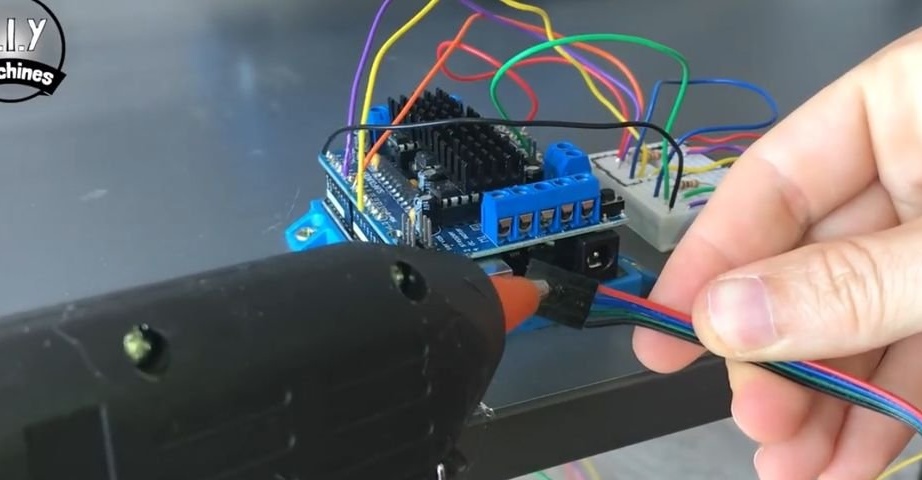
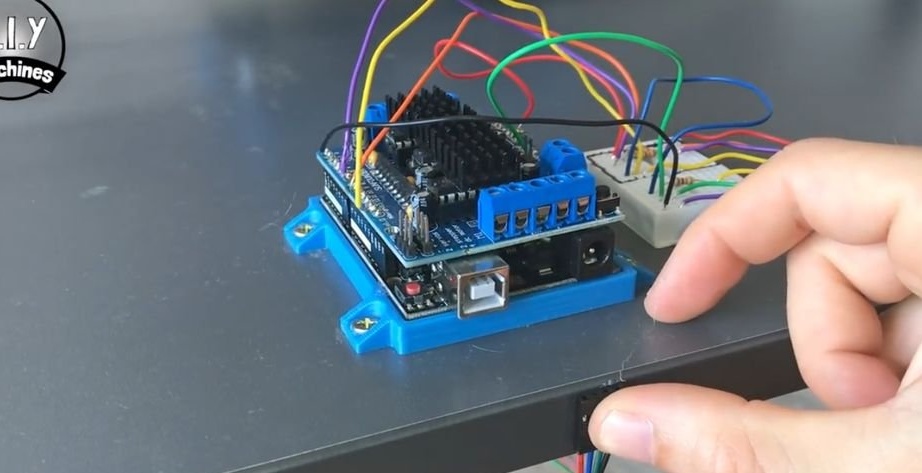
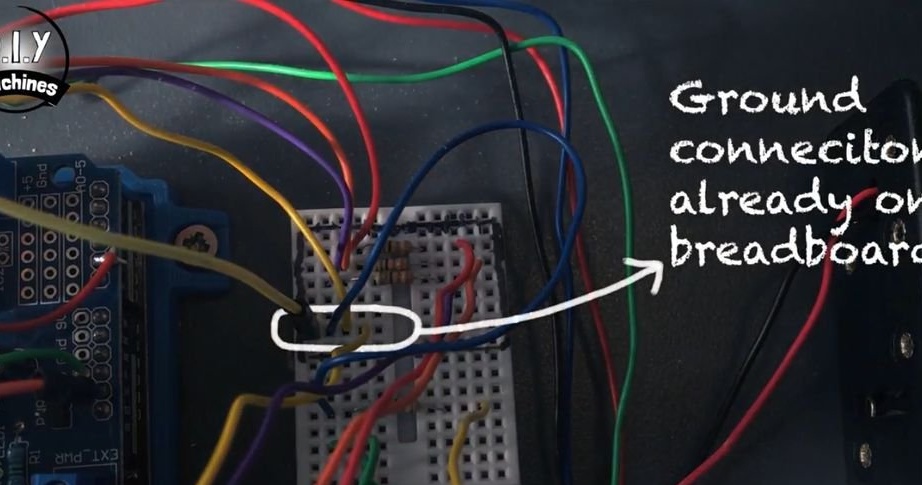
Skriver ut monteringsplatta för Arduino. Fäst plattan vid bordet. Fästs på en platta med Arduino. Installerar en motordrivrutinmodul på Arduino.
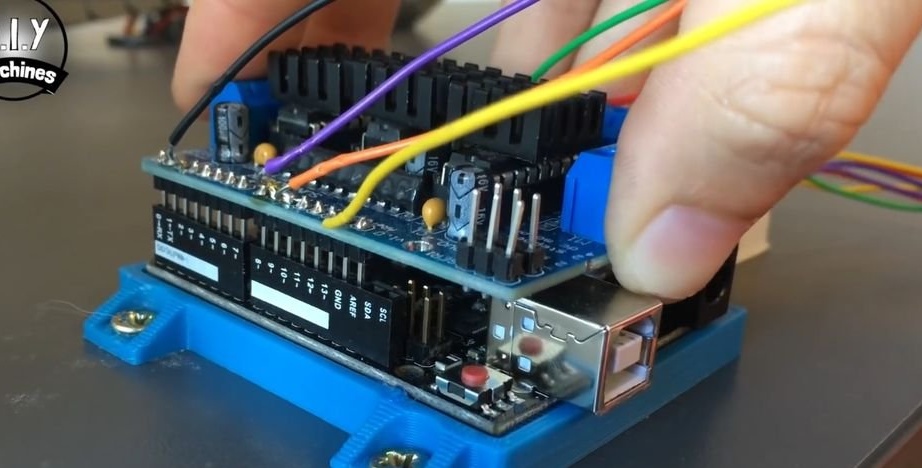
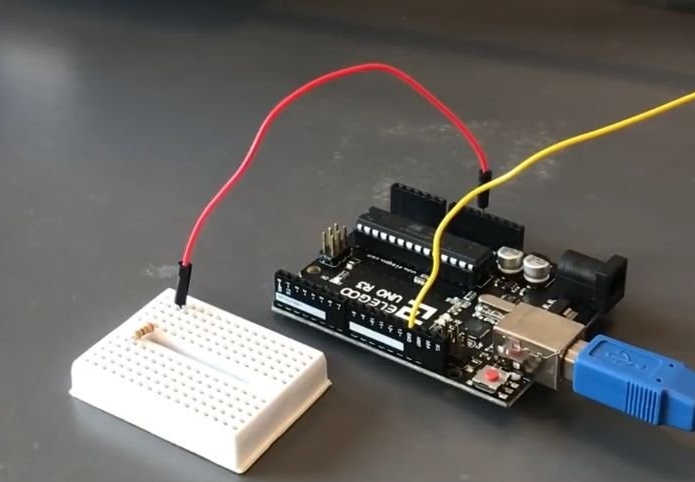
Ansluter ledningarna från föraren till brödskivan, som på bilden.
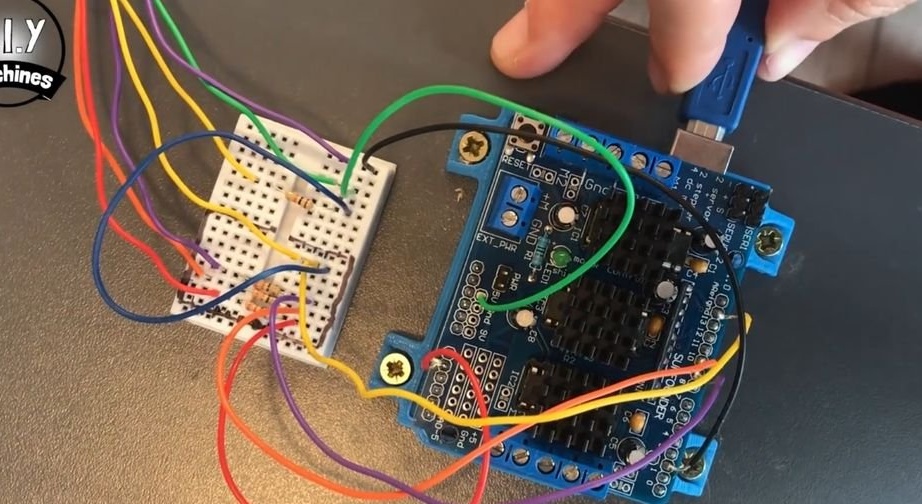
Steg tretton: Ladda ner kod
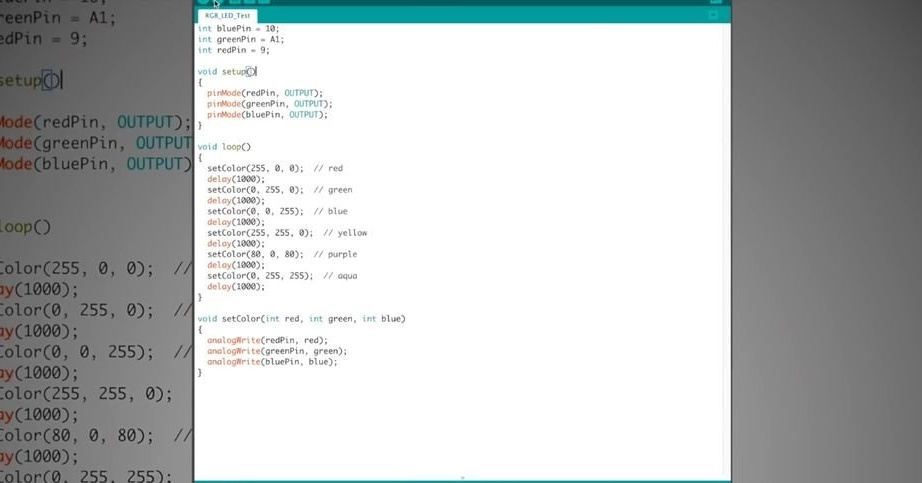
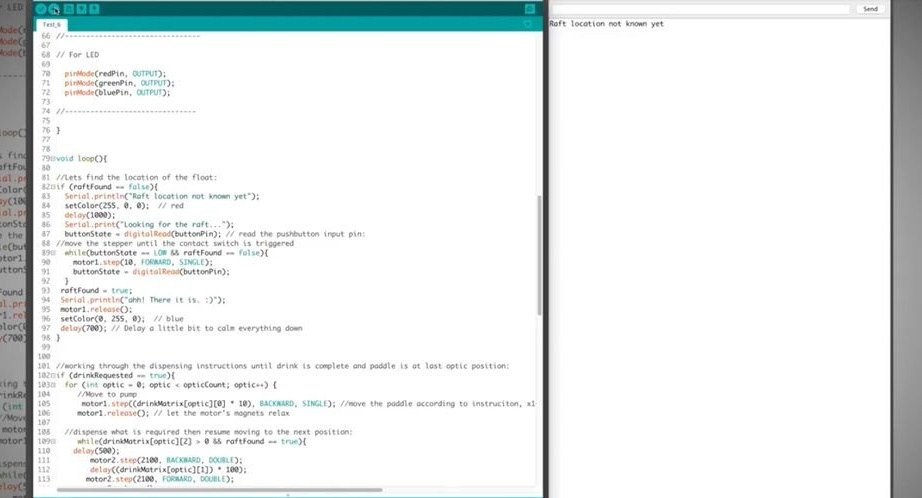
Ansluter Arduino till en dator och laddar ner koden. Koden kan hittas här.
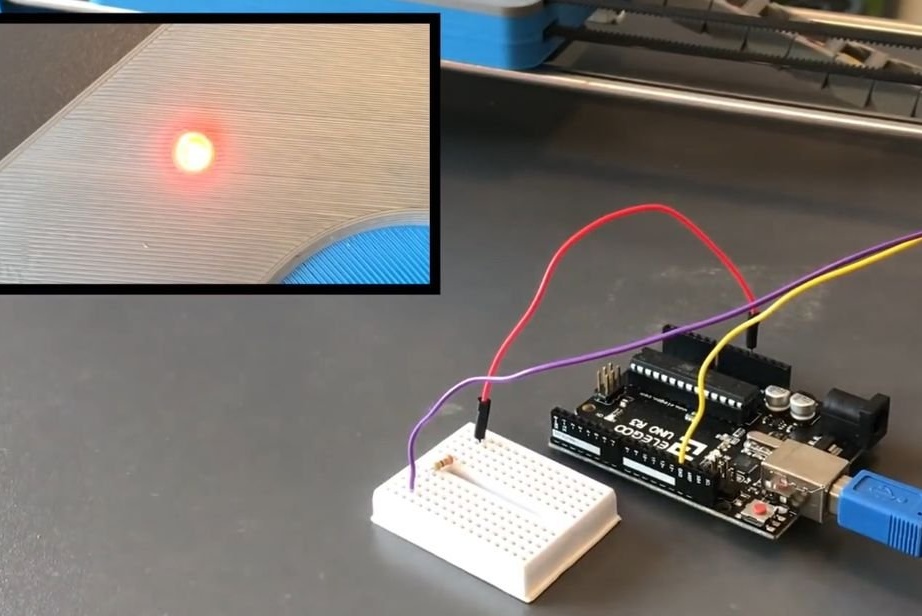
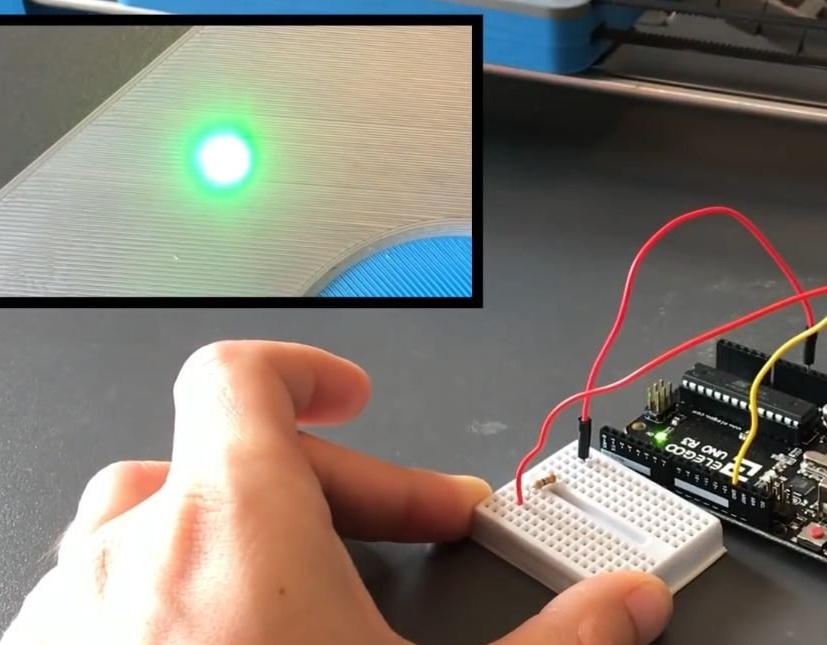
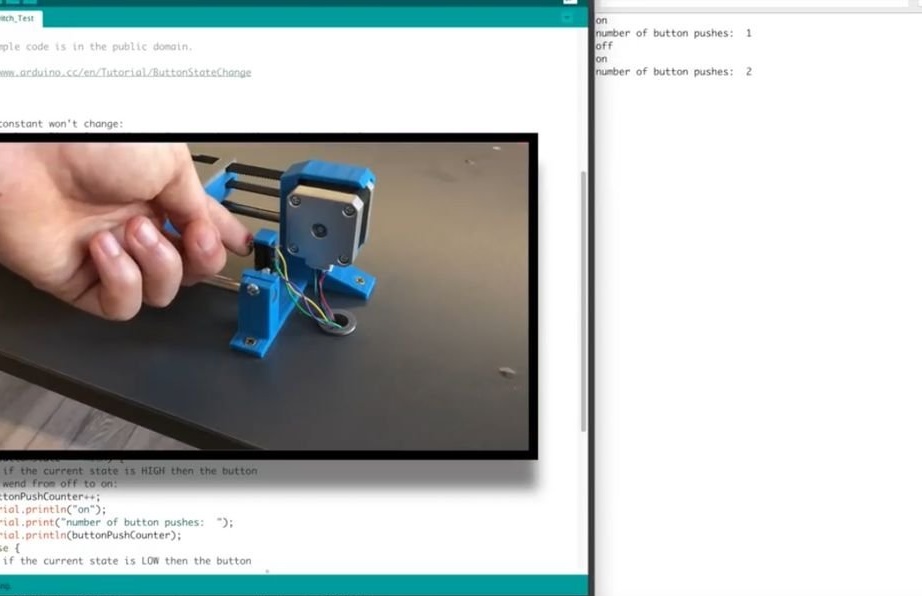
Kör LED-testkoden. Lysdioden ska lysa i olika färger.
Följande skript att ladda ner är "Contact_switch_test". Så snart den laddats bör varje tryck på gränslägesbrytaren visas på monitorn.

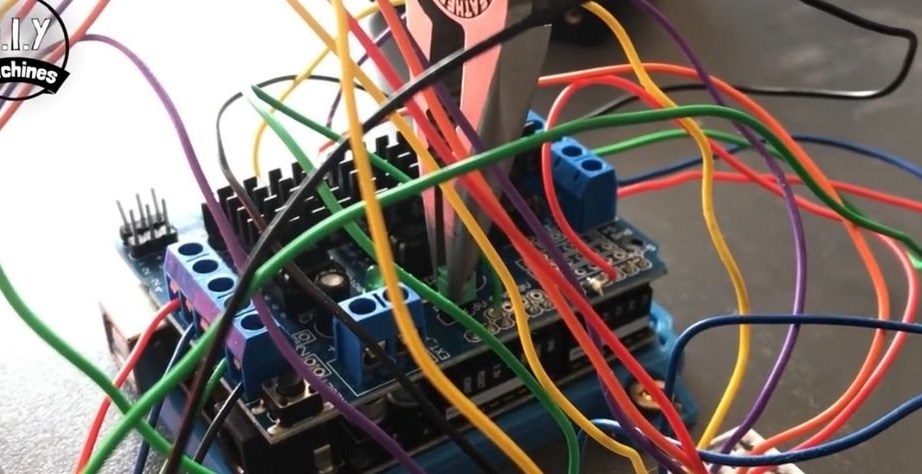
Steg fjorton: ansluta X- och Z-motorerna
Säkrar kontakten som kommer från motorn X genom brödskivan på bordet. Ansluts till drivrutiner.
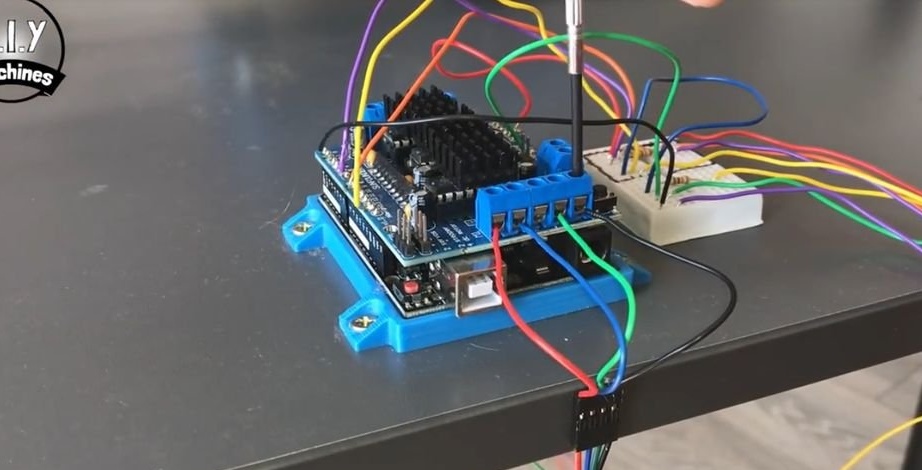
Ansluter Z-axel stegmotorer.
Steg femton: Batterifack
Tar bort en bygel i en modul. Ansluter batterifacket.
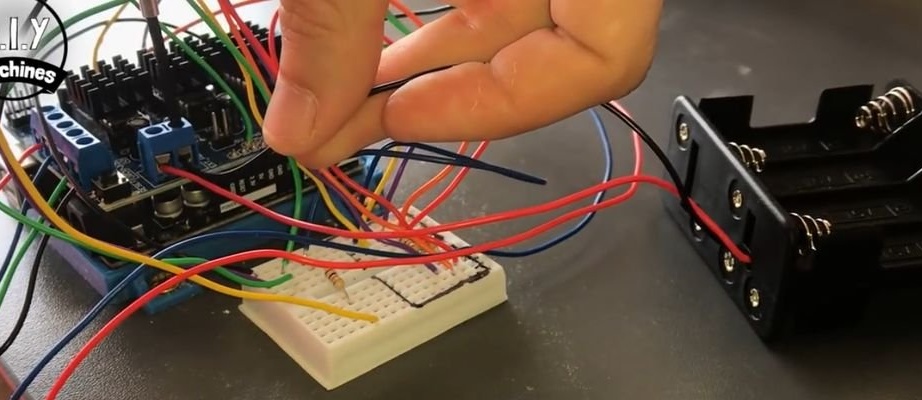
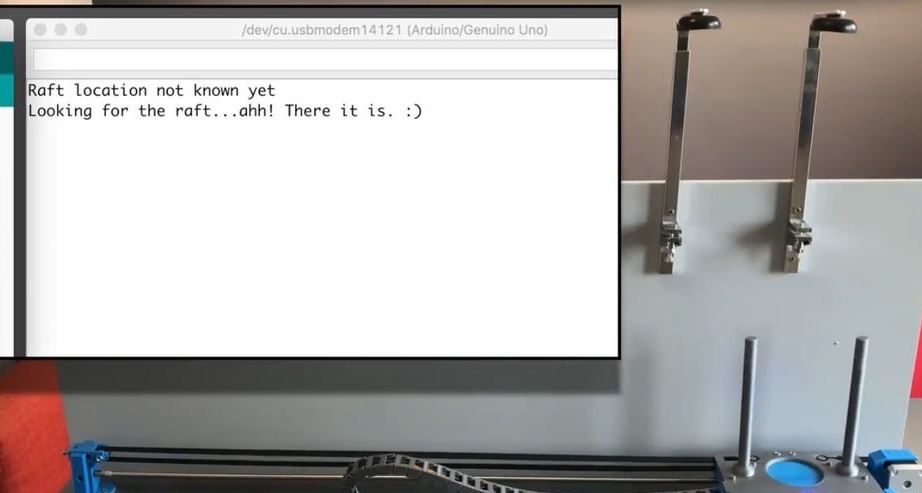
Nu kan du köra "test 1". Den röda lysdioden ska tända och plattformen ska nå gränslägesbrytaren. Då lysdioden blir grön.
Steg sexton: flaskhållare
Med hjälp av konsoler säkras MDF: s bakvägg.




Flyttar plattformen ytterligare 1 cm från gränslägesbrytaren. Riknar in glashållaren och säkerställer flaskhållaren med utmataren (tyvärr gav master inte en beskrivning för tillverkning eller köp av hållaren). Nästa. hållare fästs var 12 cm.



Steg sjutton: kod, kalibrering, test
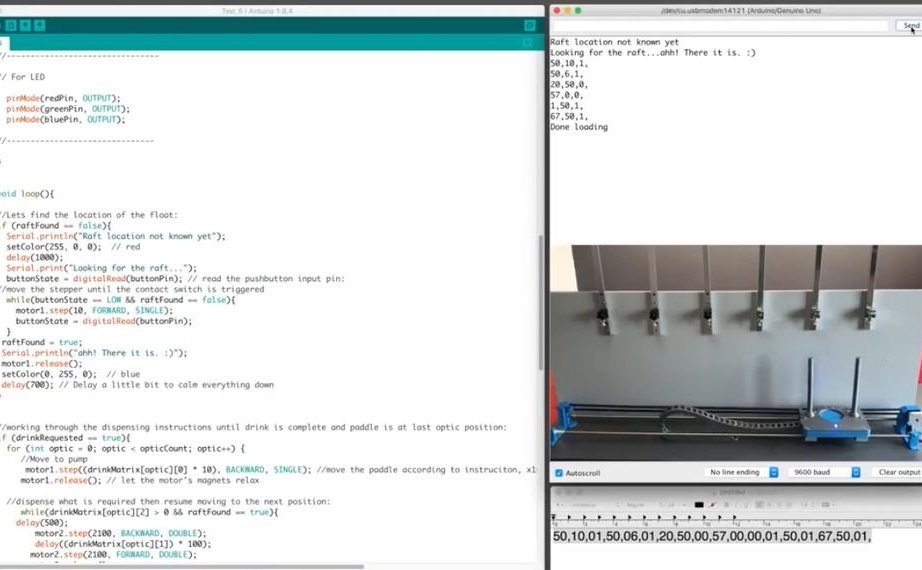
Laddar huvudkoden kl https://www.thingiverse.com/thing:2478890
Följande värden ställs in i inställningen: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Befälhavaren har sex automater. I inställningarna finns det sex grupper om tre, där den första siffran är avståndet från gränslägesbrytaren, den första dispensern, den andra dispensern, etc., den andra siffran är den tid då drycken hälldes i glaset, den tredje är antalet hälla. Alla dessa värden kan ändras efter behov.


Den första drinken som enheten tillagade var gin och cola. För att jämna ut trycket i flaskan med cola måste du göra ett hål. Sedan ställer in guiden de nödvändiga parametrarna.



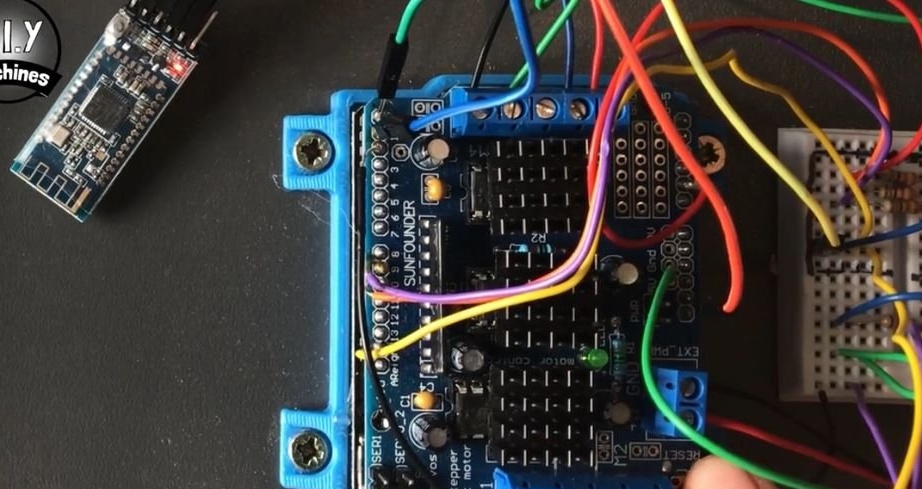
Steg arton: Bluetooth-modul
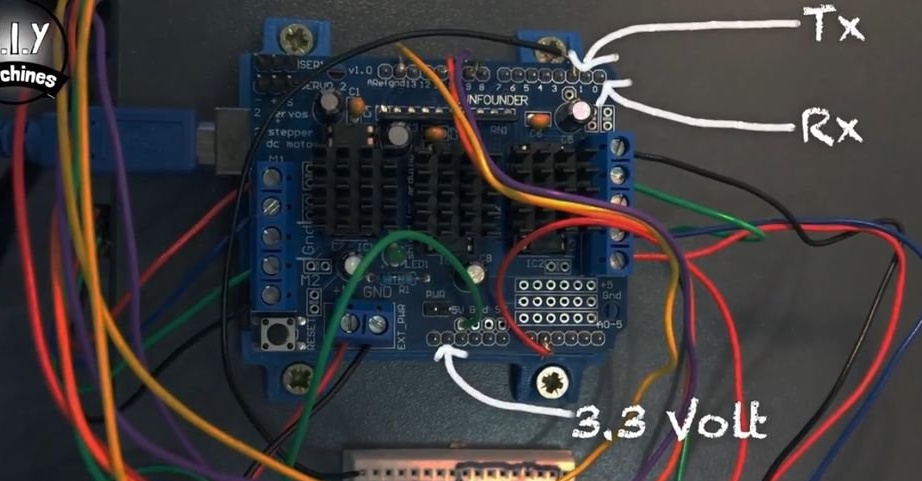
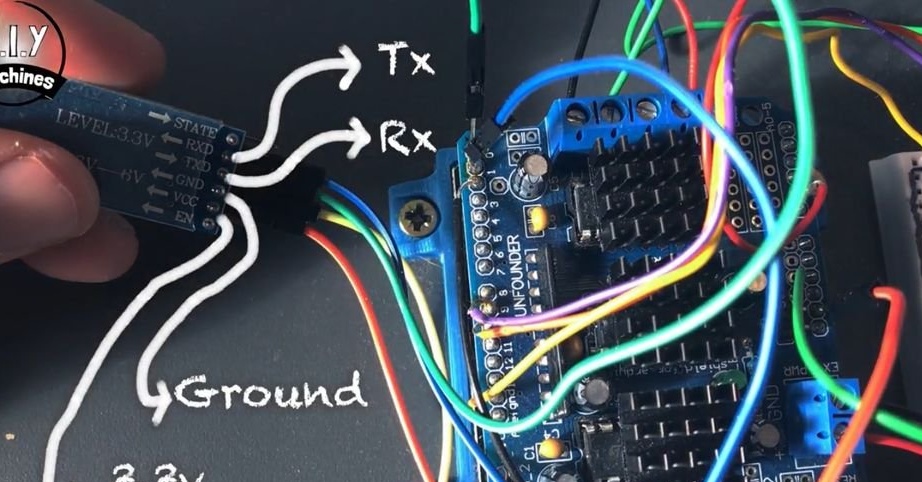
För att kontrollera bartendern från gadgeten installerade befälhavaren en Bluetooth-modul. Modulen ansluts enligt följande.
HM10 -> Arduino Shield
RXD ------> TX
TXD -------> RX
GND ------> Mark
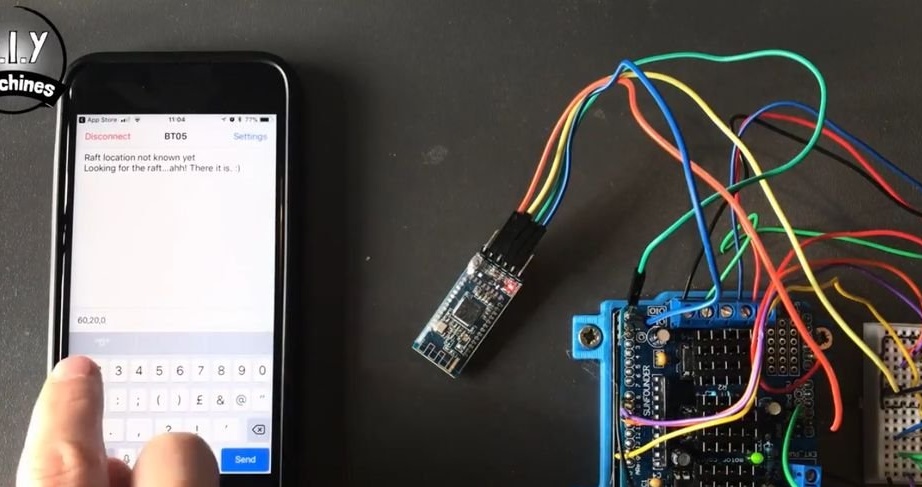
VCC ------> 3,3V

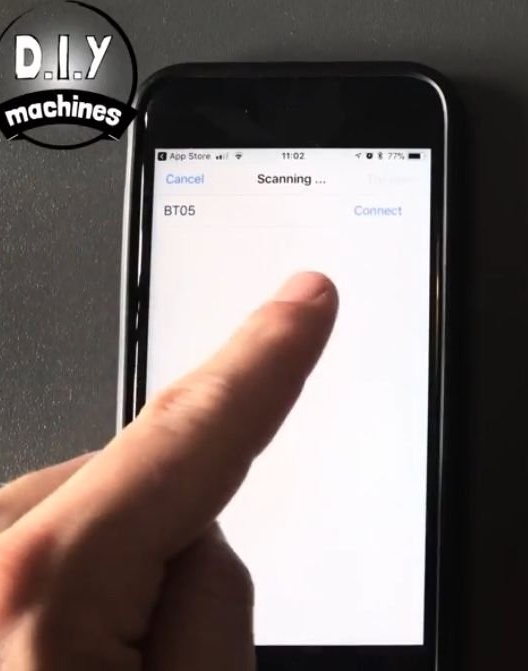
Befälhavaren har en smartphone som kör iOS. För detta system laddar han ner “hm10 bluetooth serial lite” från applikationsbutiken. Sedan upprättar den anslutningar och anger inställningar.

Allt är klart och för mer fullständig information några videor.