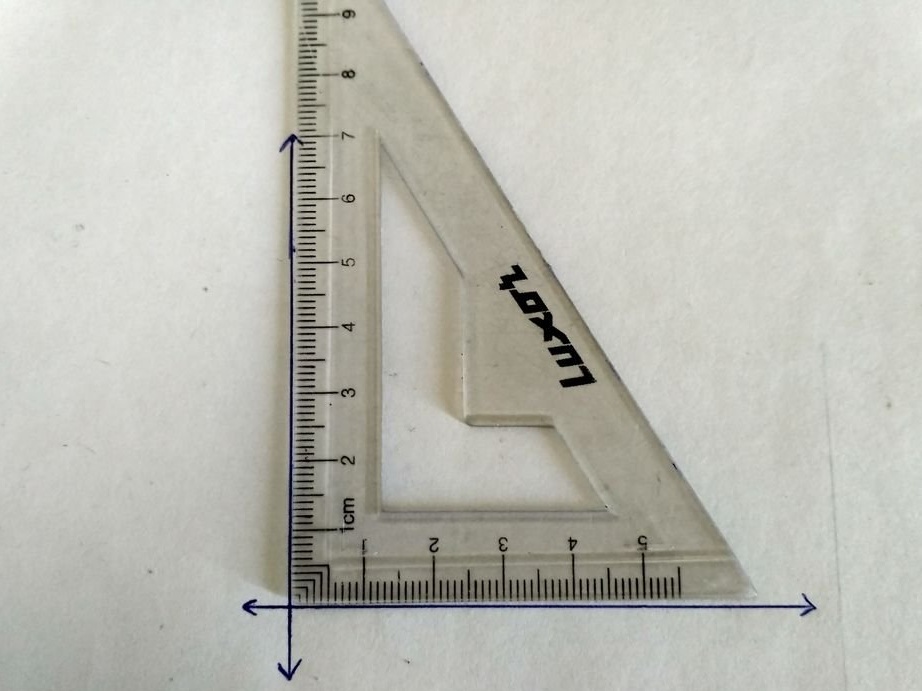

Guiden skapade en enhet som fungerar som en digital nivå + linjal + gradskiva + måttband. Enheten är liten nog för att passa i en ficka, och batteriet laddas enkelt med en telefonladdare.
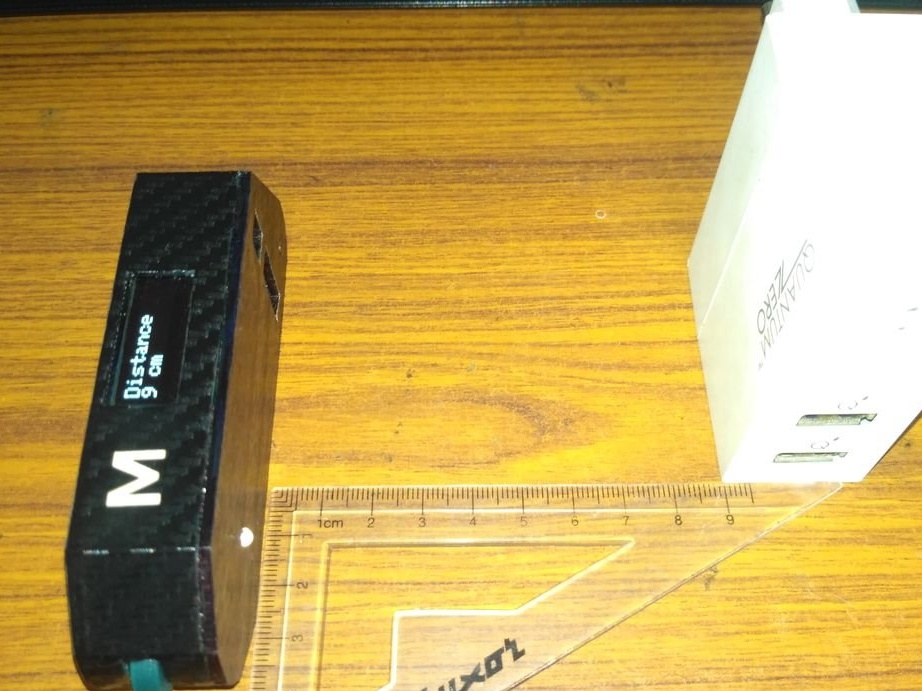
Denna enhet använder en accelerometer och en gyroskopsensor för att exakt mäta nivå och vinkel, en IR-sensor för icke-kontaktmätning av linjär längd från 4 till 30 cm, en sensor med ett hjul som kan rullas längs en krökt yta eller en krökt linje för att mäta längden på ett objekt.
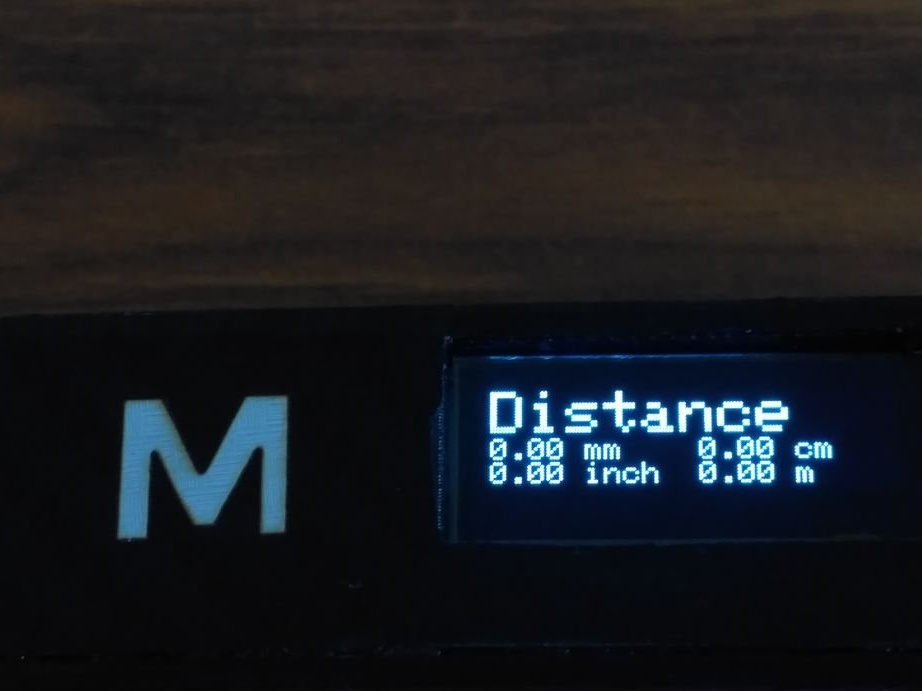
Navigering genom enhetens lägen och funktioner utförs med pekknapparna, betecknade M (läge), U (enhet) och 0 (noll).
M - val mellan olika typer av mätningar
U - för att välja mellan måttenheter mm, cm, tum och meter
0 - Återställ uppmätta värden till 0 efter mätning av avstånd eller vinkel.
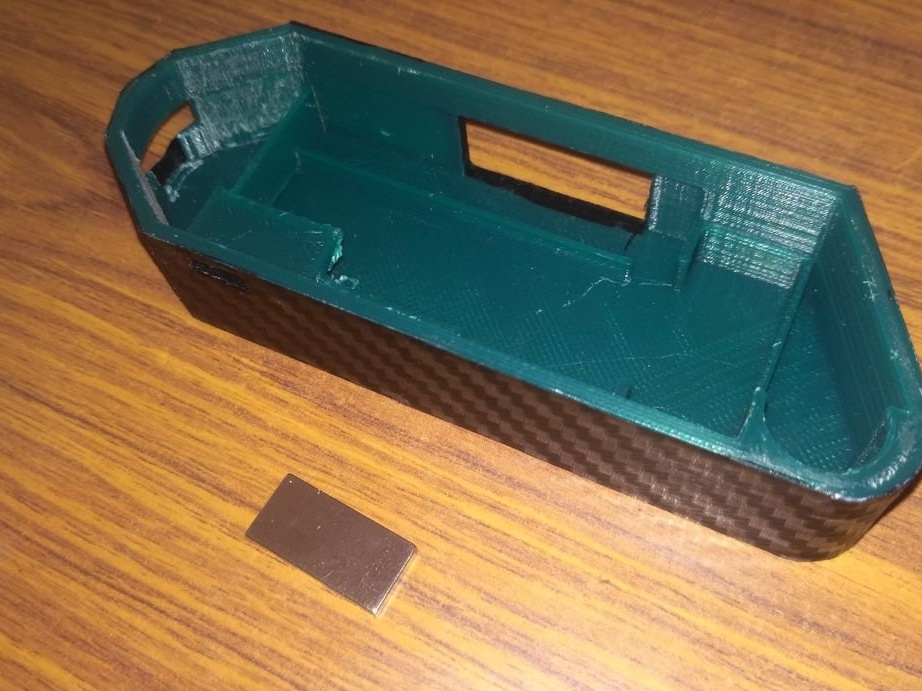
Enheten har en neodymiummagnet inbyggd i sin bas så att den inte glider och inte glider från metallytan som mäts.
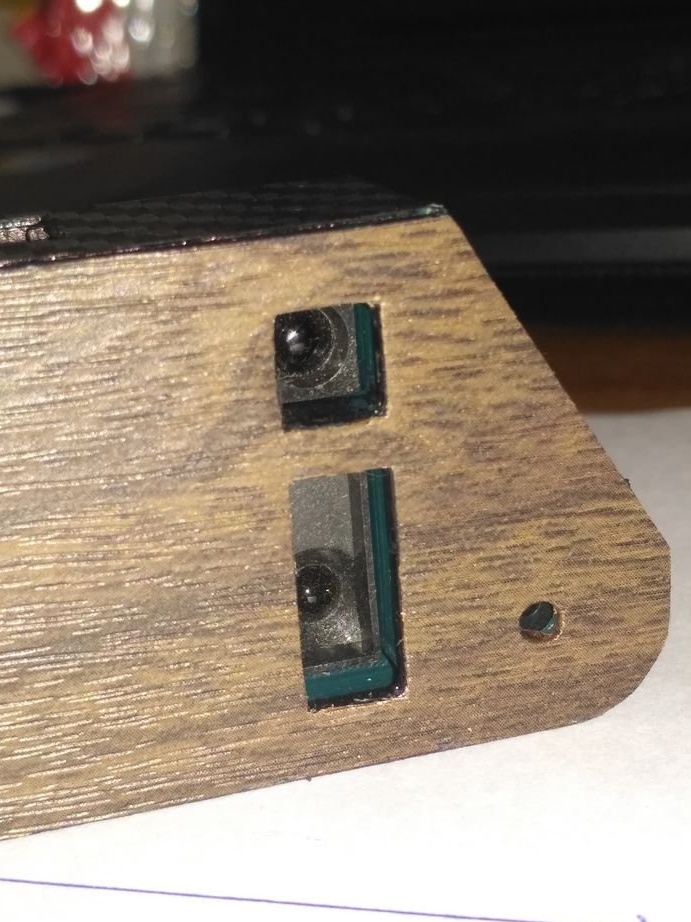
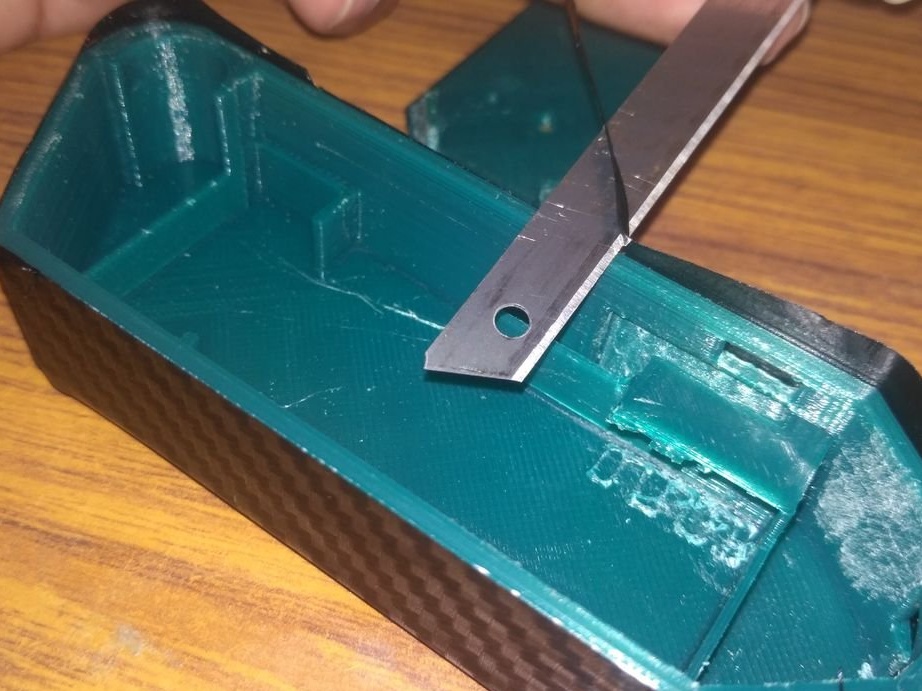
Väskan är utformad för att göra enheten så kompakt som möjligt.
Låt oss titta på en video med exempel på hur enheten fungerar.
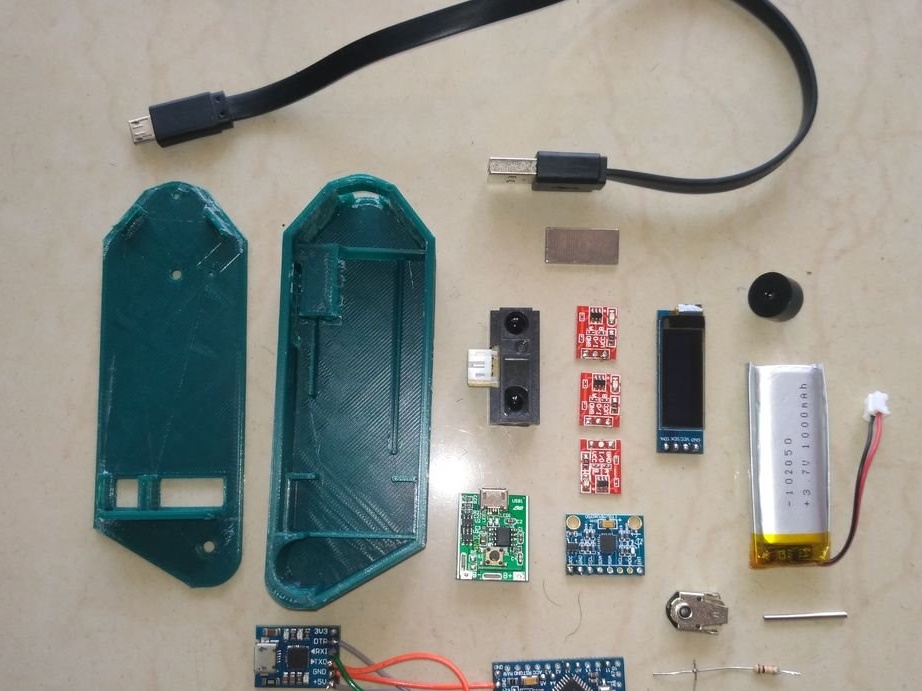
Verktyg och material:
-IR avståndsgivare Sharp GP2Y0A41SK0F;
- Modul MPU6050 accelerometer / gyroskop;
-Laddarmodul;
-Enkoder;
-128 X 32 OLED-display;
-Arduino pro mini ATMEGA328 5 V / 16 MHz;
-12 mm summer;
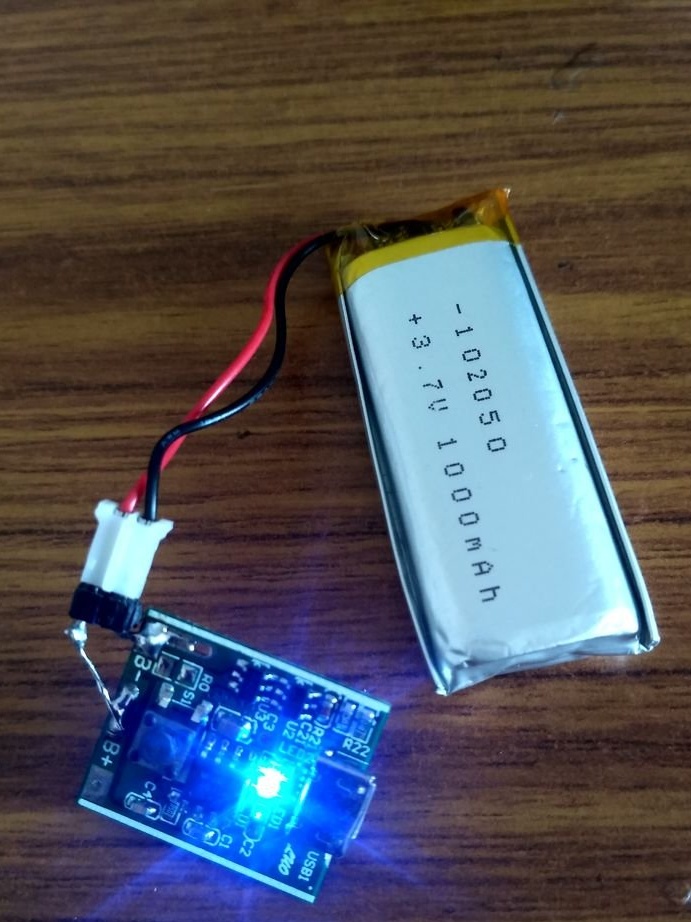
-3,7 V, 1000 mAh litiumpolymerbatteri;
- TTP223 peksknappsmodul - 3 st .;
- Neodymmagnet 20x10x2 mm;
-Convertergränssnitt CP2102;
Emaljerad koppartråd;
-Resistorer 10K - 2 st;
- Stålstång 19 mm lång med en diameter på 2 mm;
-LED LED;
-Vinylfilm;
- Micro USB-kabel;
- sax;
-Nozh;
- pincett;
-Pistolen;
-Super-adhesiv;
-Lödningstillbehör;
-Laser skärare;
- 3D-skrivare;
-Kusachki;
- Avfallspapper;

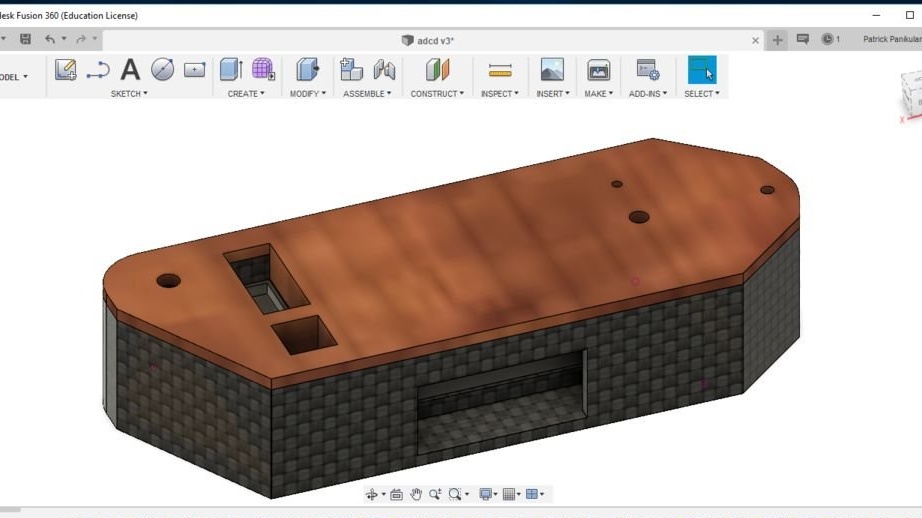
Steg ett: Fallet
Först skriver guiden ut ett fall på en 3D-skrivare. Filer för utskrift kan laddas ner nedan.
BODY.stl
LID.stl
wheel.stl
Det limmar fodralet med vinylfilm, som tidigare slipat ytan.







Steg två: Schema
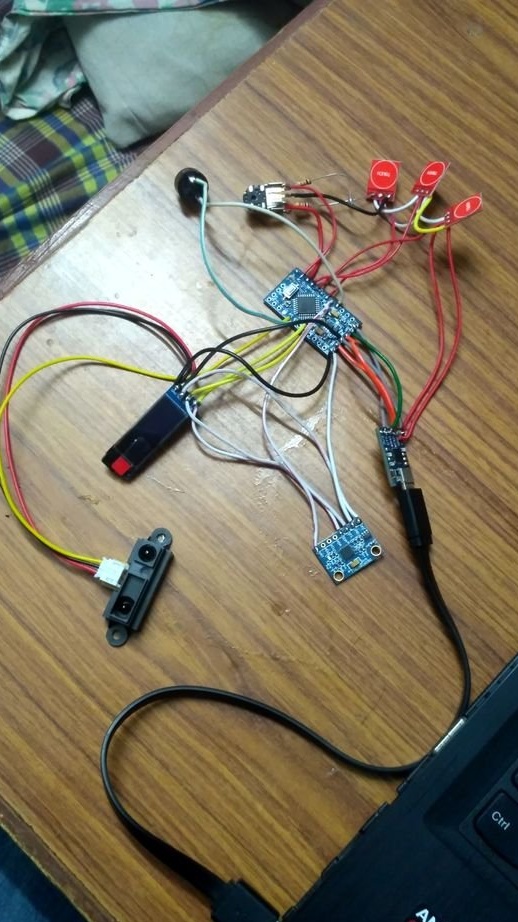
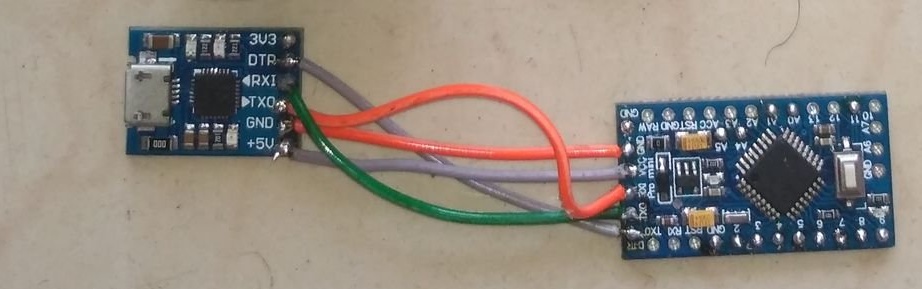
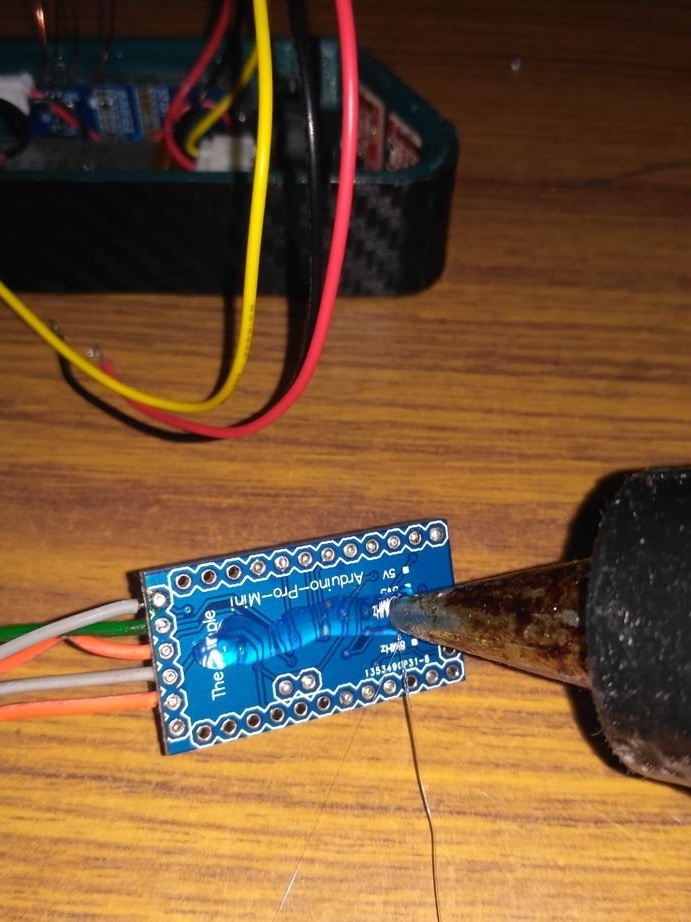
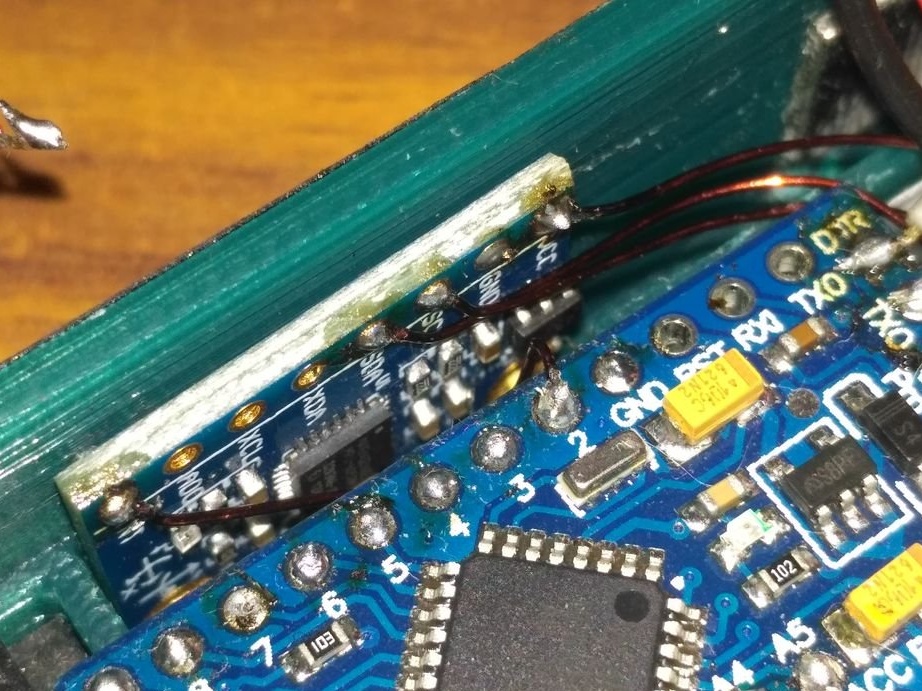
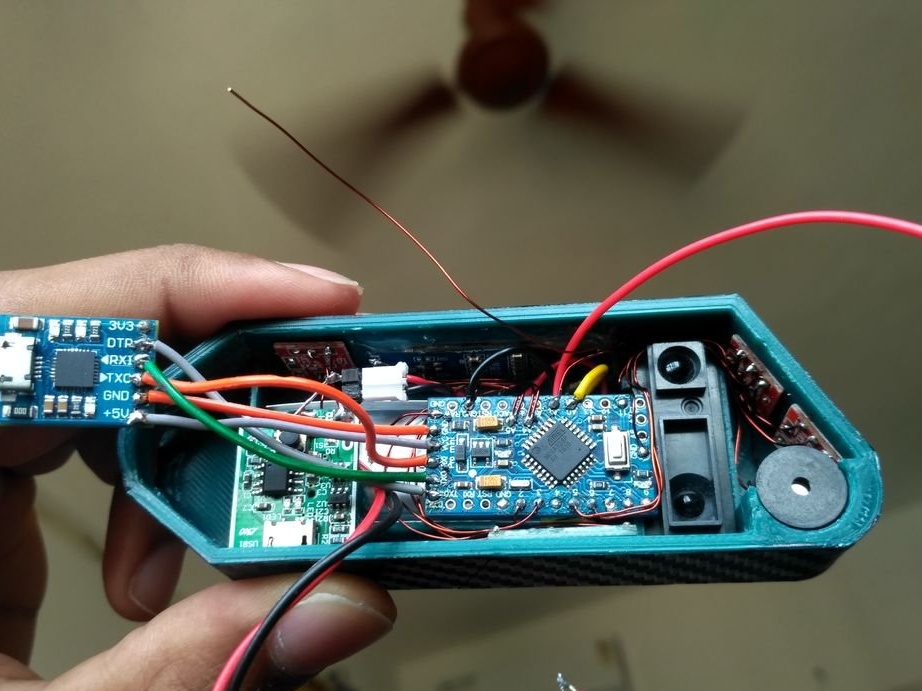
skillnad Arduino nano, pro mini kan inte programmeras direkt genom att ansluta en USB-kabel. Därför måste du först ansluta en extern USB till pro mini-omvandlaren för att programmera den. Det första fotot visar hur dessa anslutningar ska göras.
Vcc - 5V
GND - GND
RXI - TXD
TXD - RXI
DTR - DTR
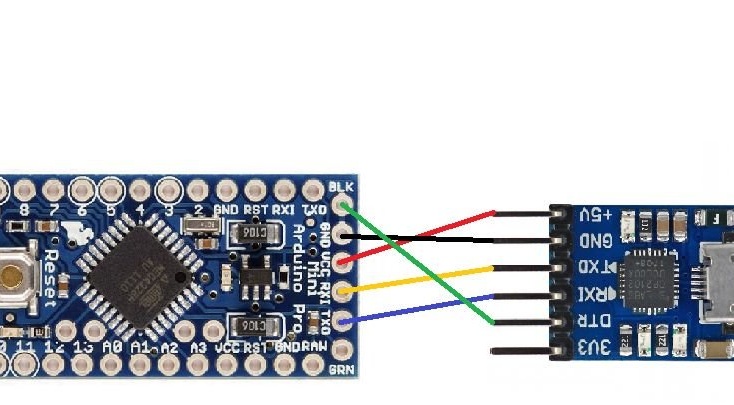
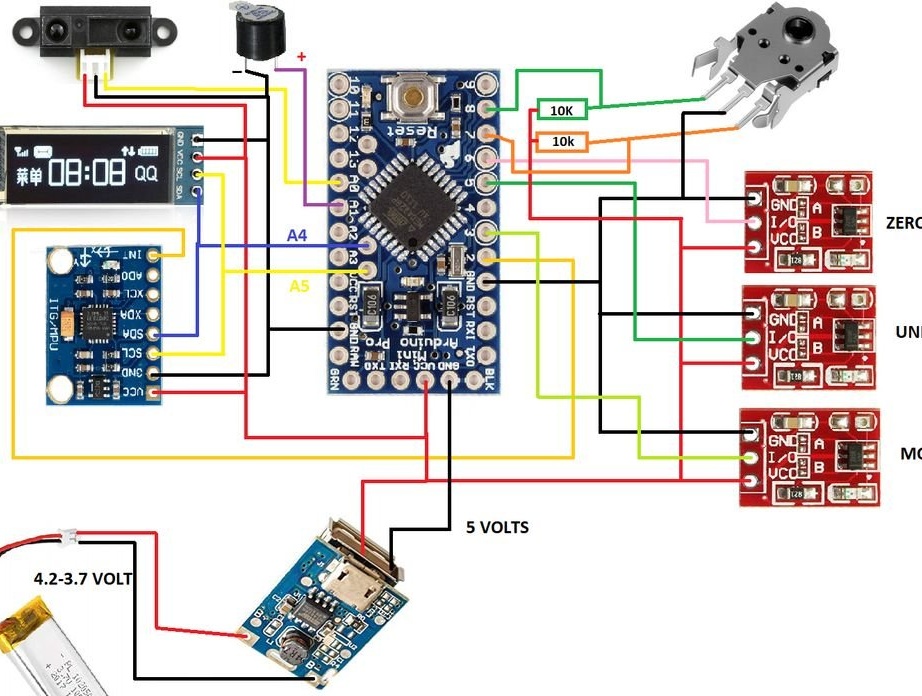
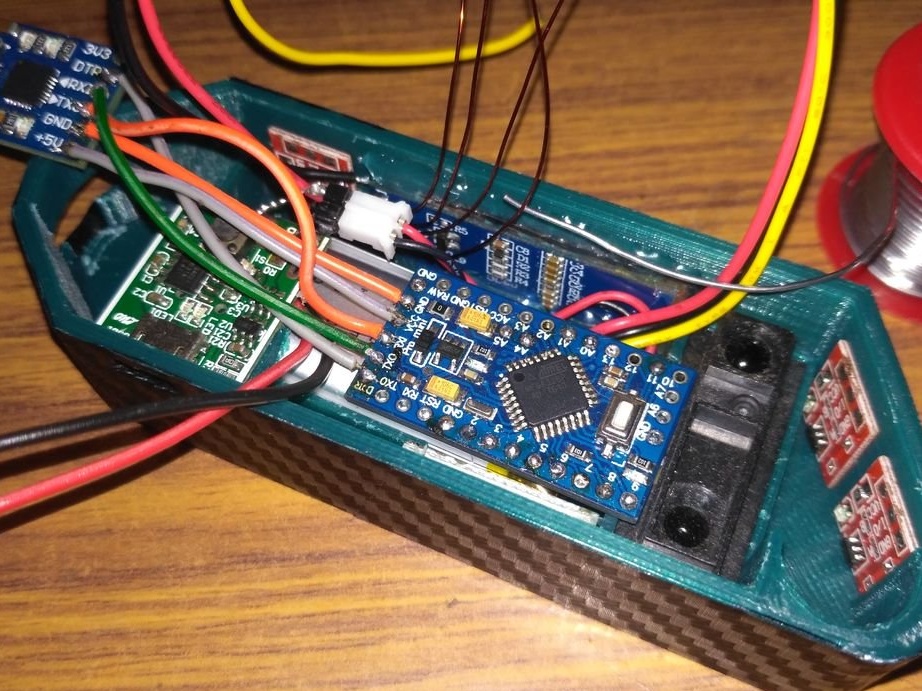
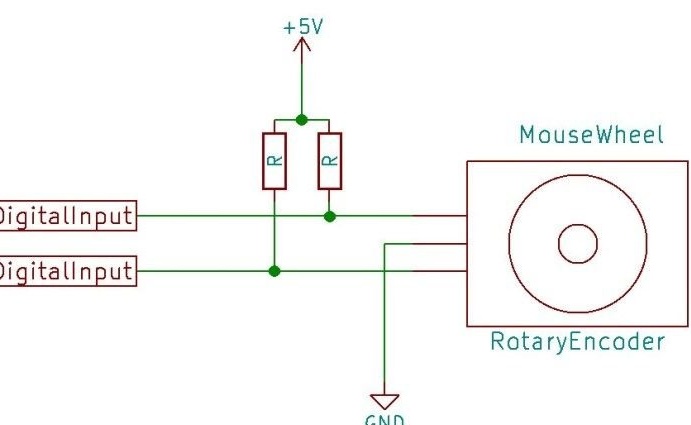
Den andra bilden visar det kompletta kretsschemat för detta projekt.
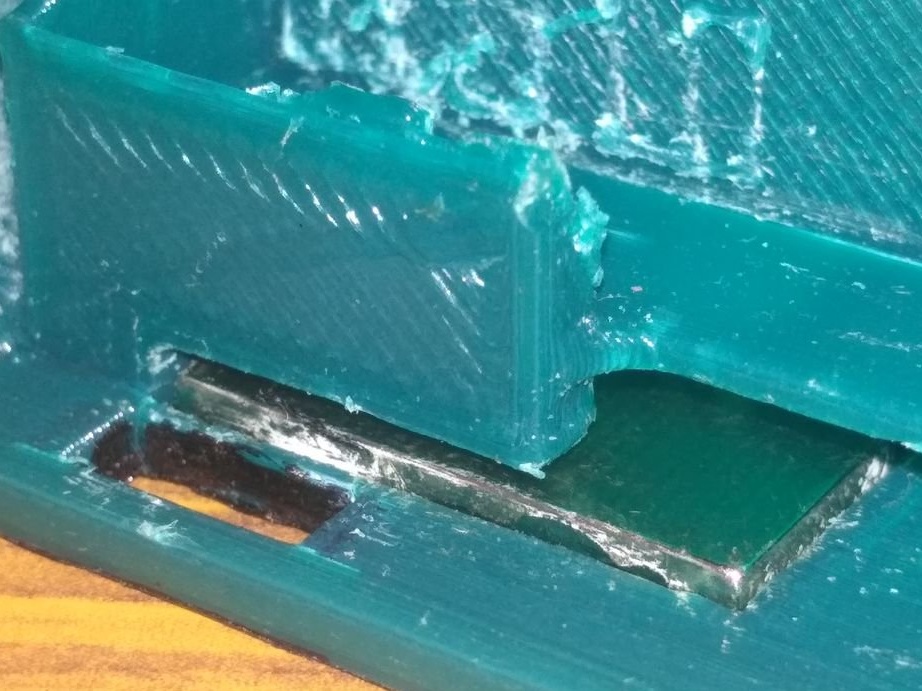
Steg tre: Magnet
Limma magneten på kroppen.

Steg fyra: Sensorinställning
För att minska storleken är IR-sensorn och kodaren avstängd.






Steg fem: Visa
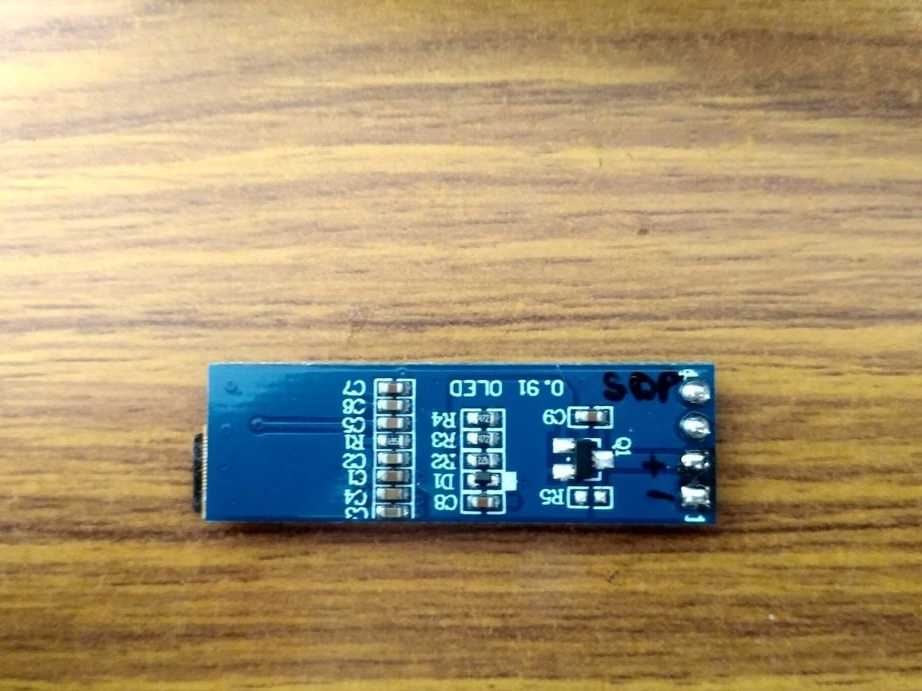
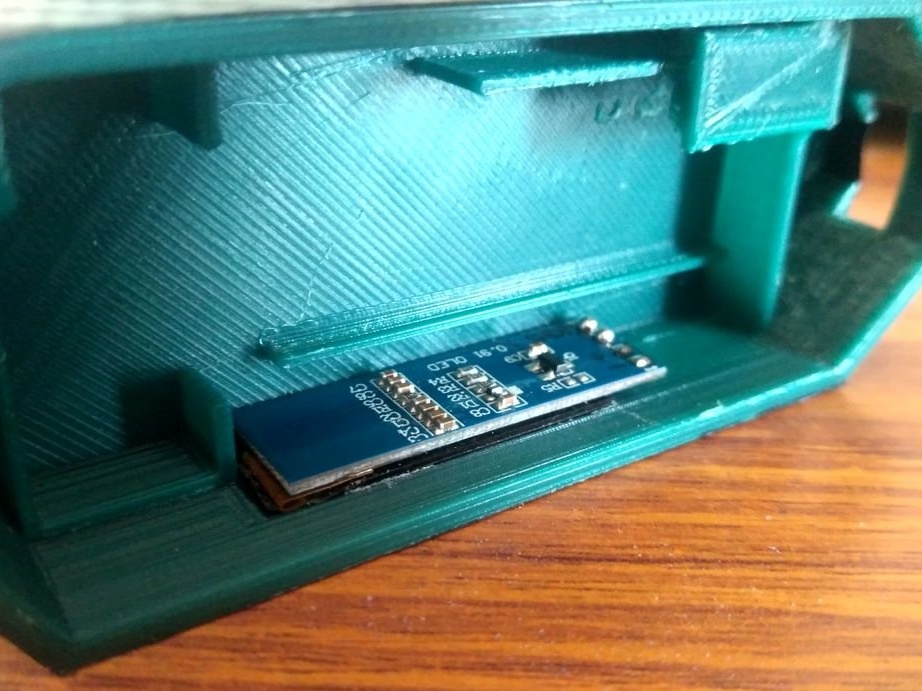
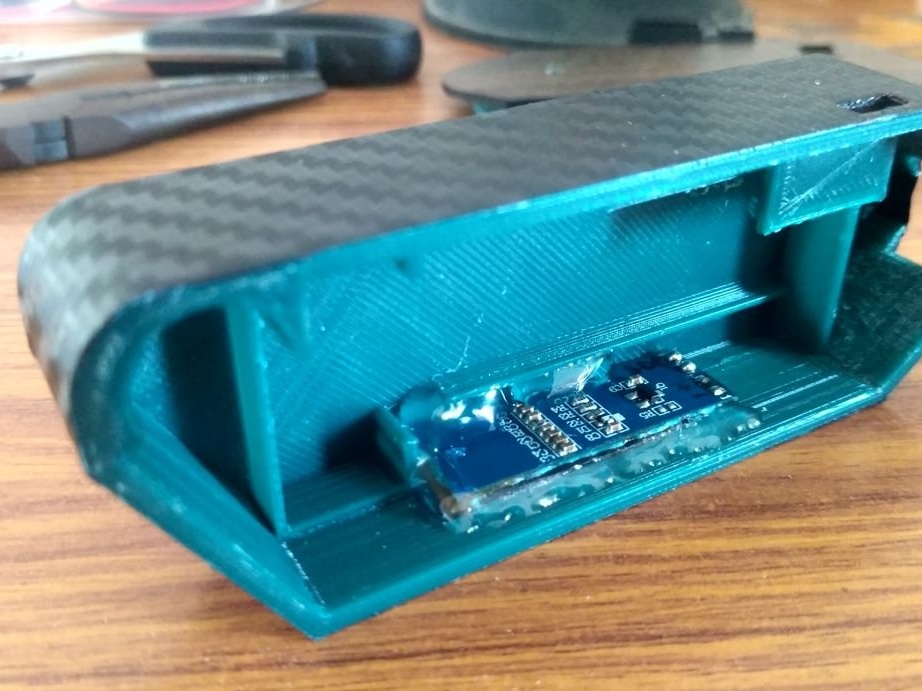
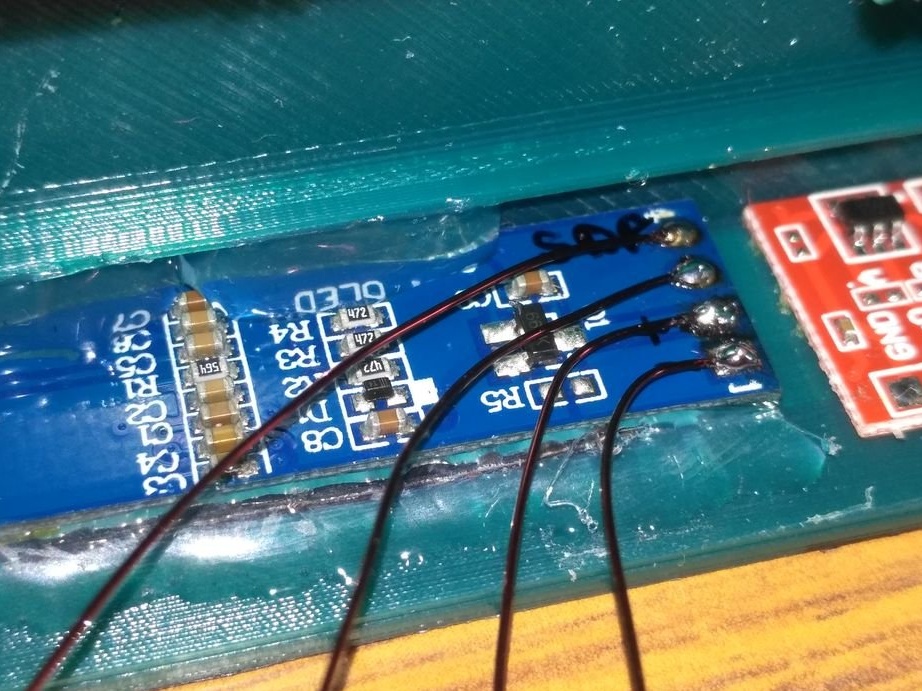
Markerar namnen på kontakterna på baksidan av OLED-skärmen så att du därefter kan göra rätt anslutningar. Ställer in OLED-displayen till rätt position, som visas i den andra figuren. Fixar skärmen med hett lim.

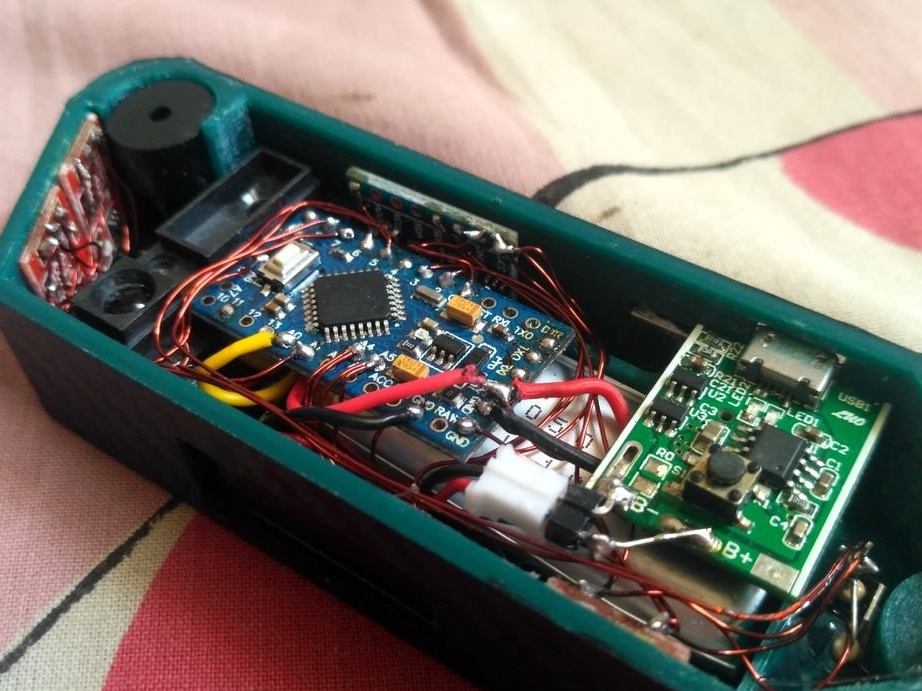
Steg sex: Moduler
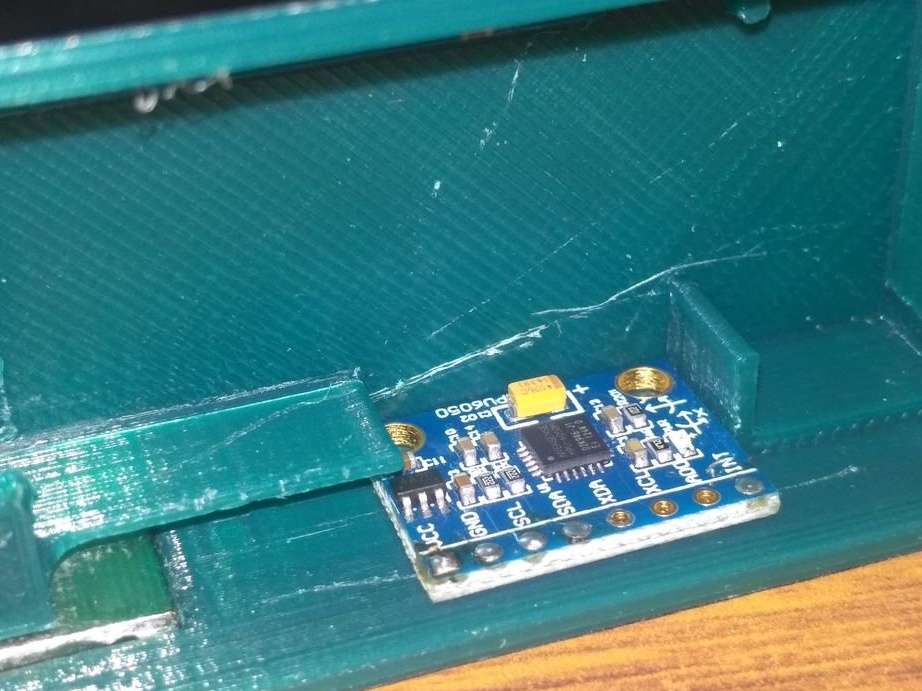
Limer sensormodulen och MPU6050.


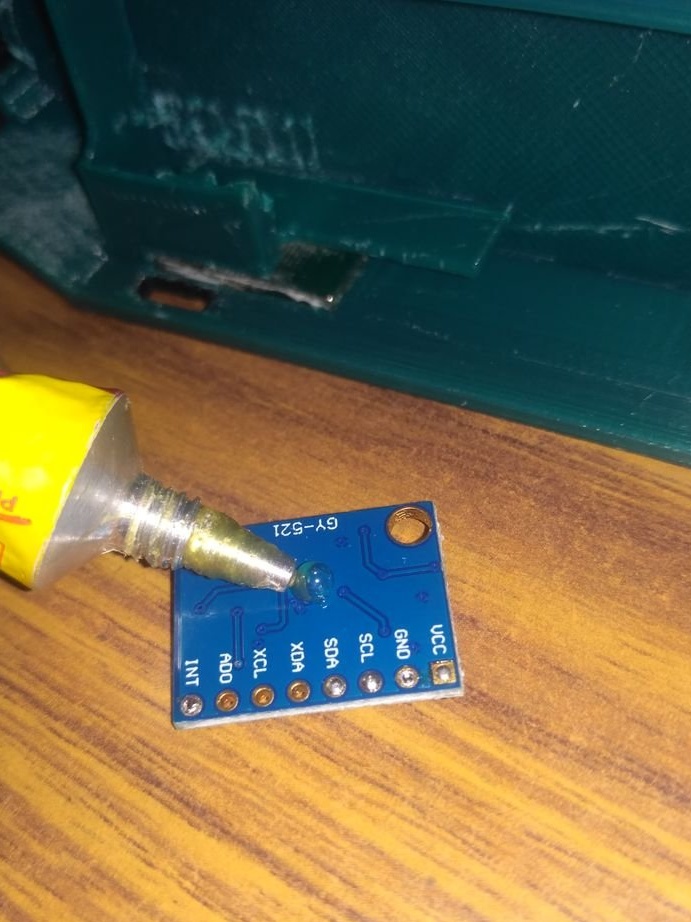
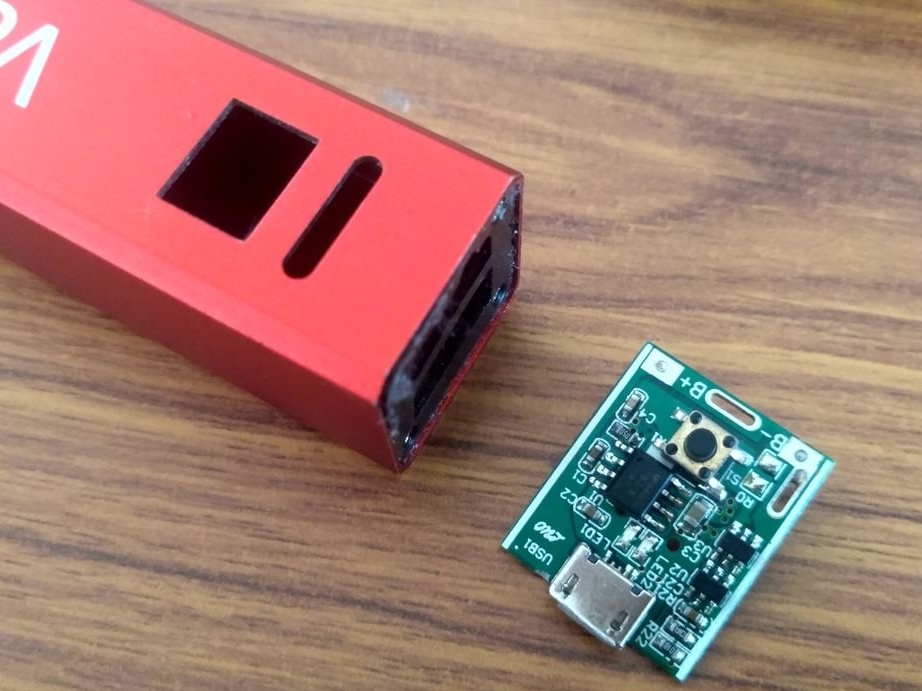
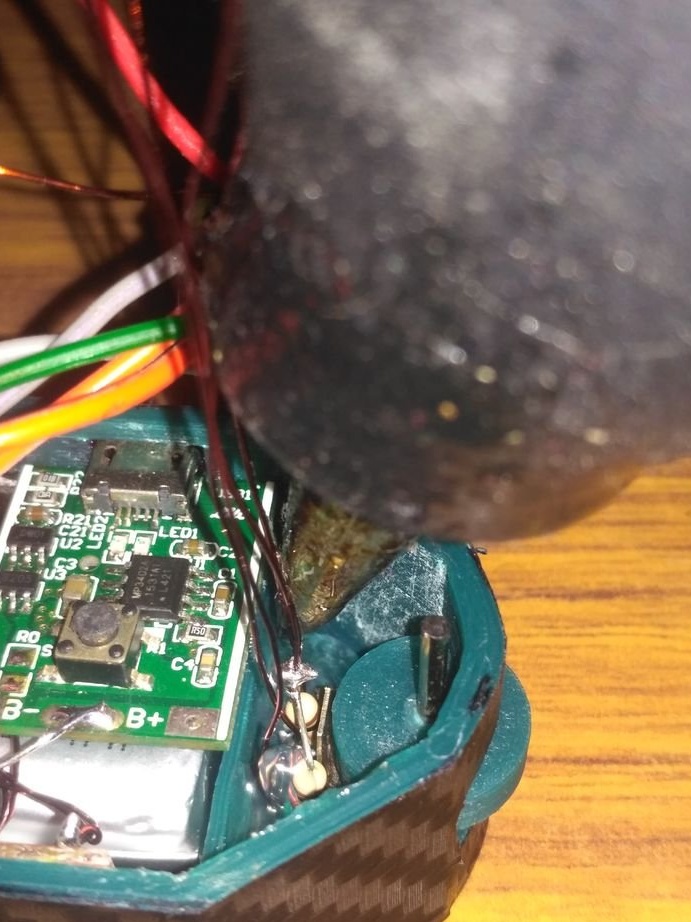
Sjunde steg: laddningsmodul och batteri
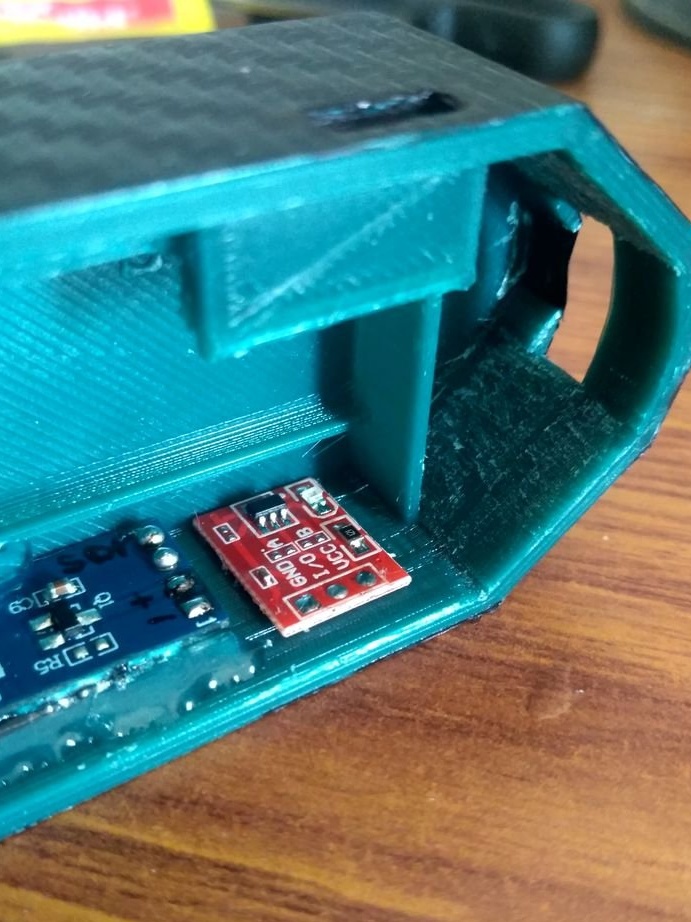
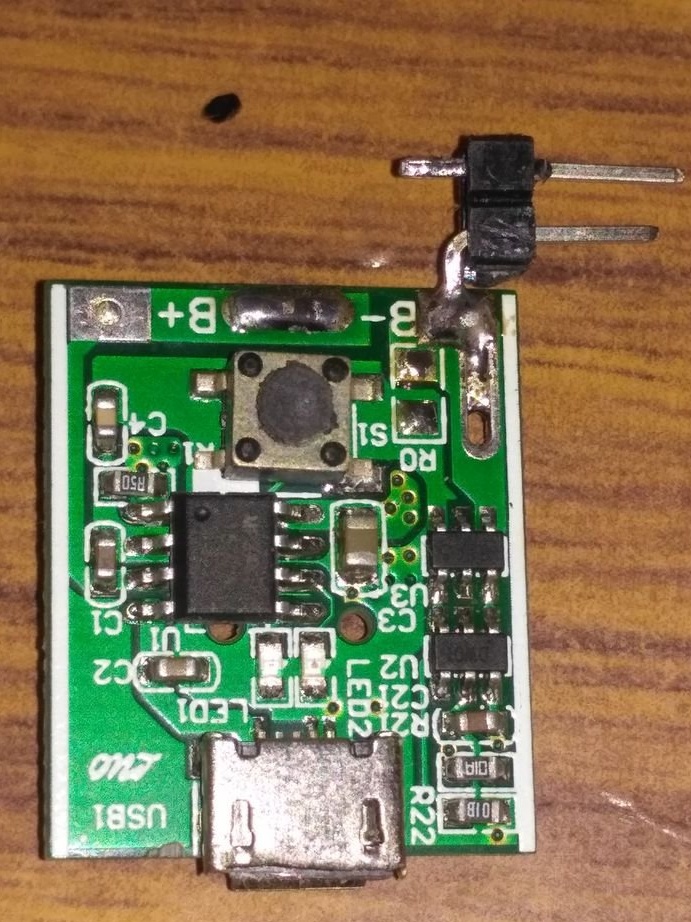
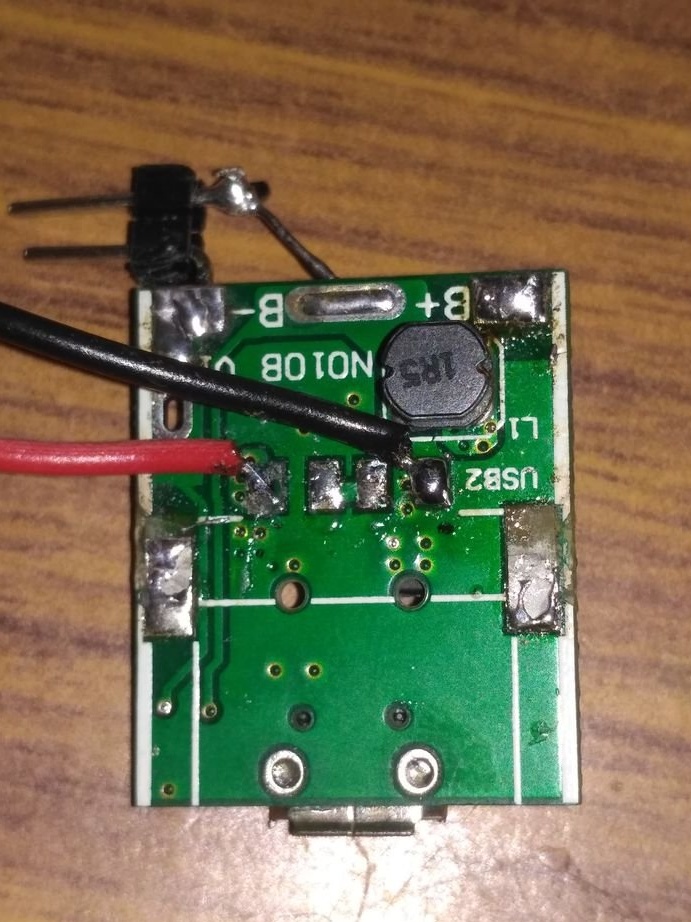
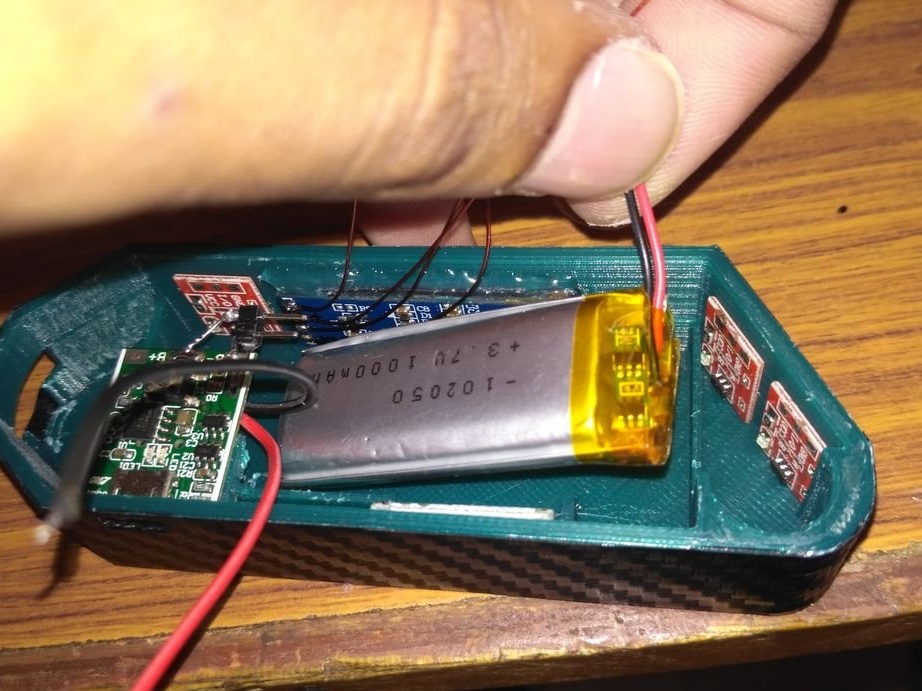
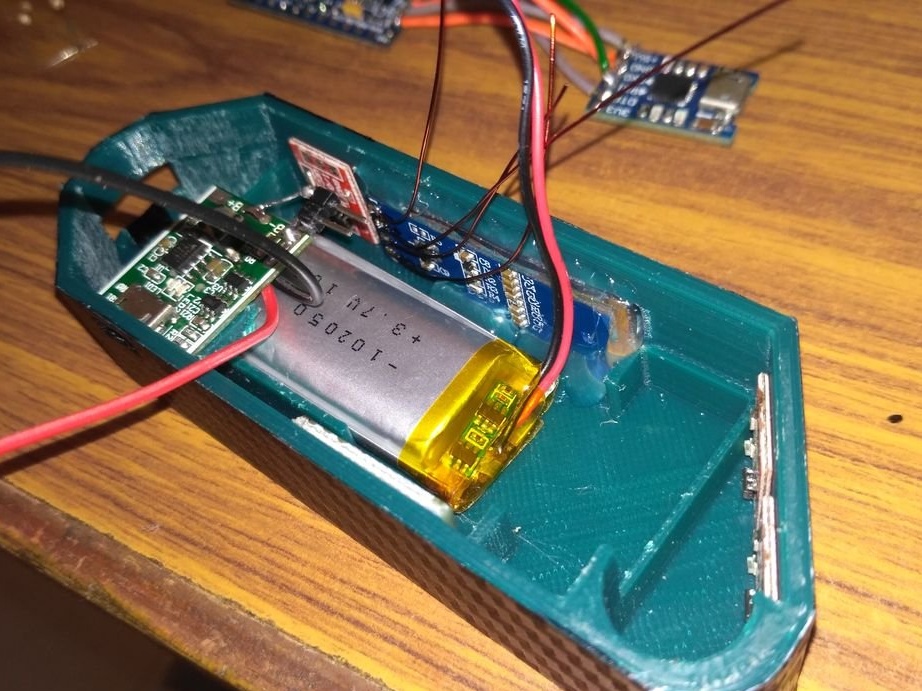
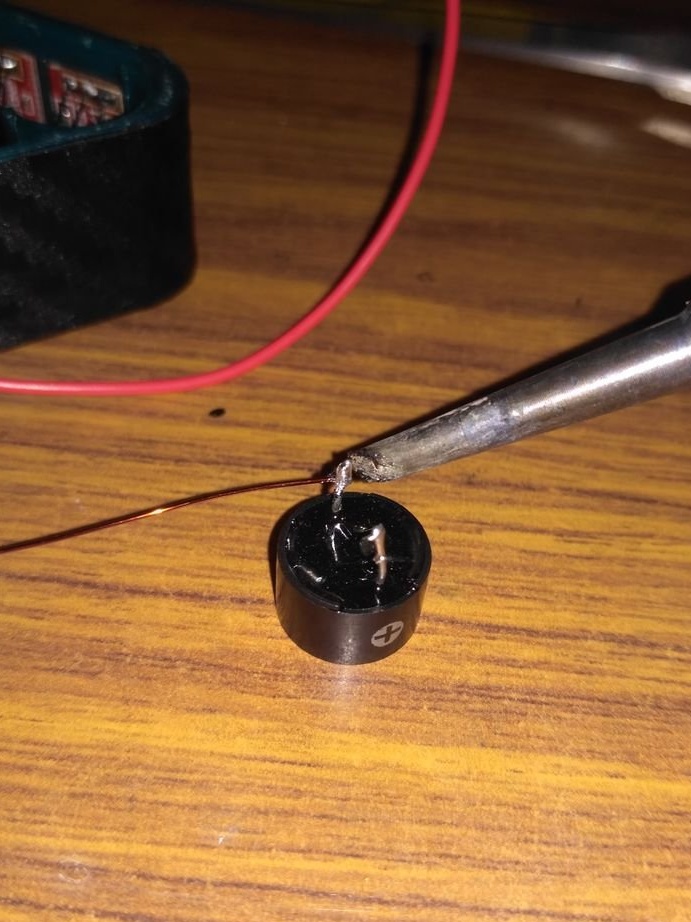
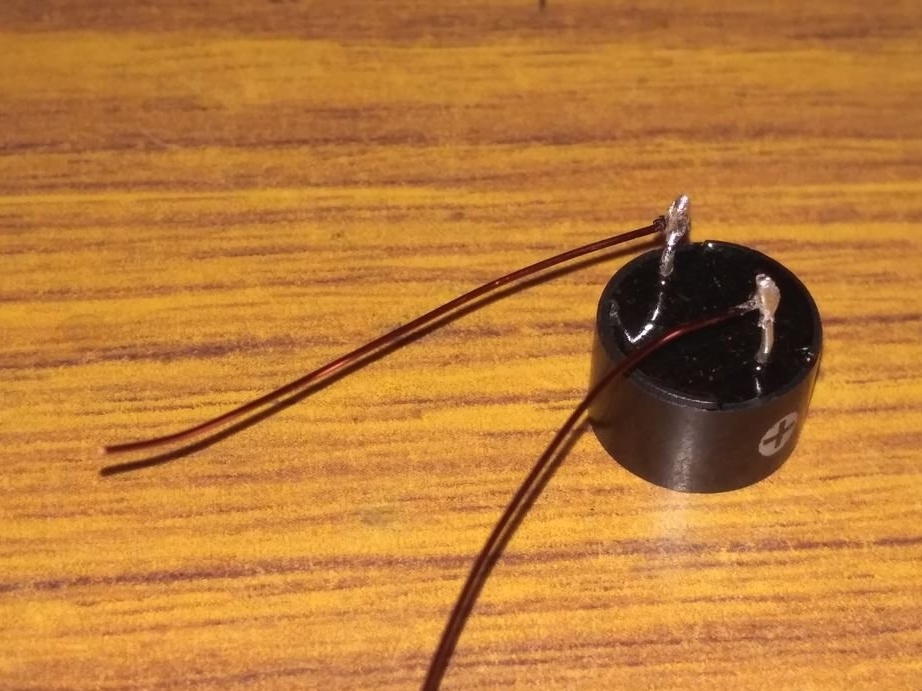
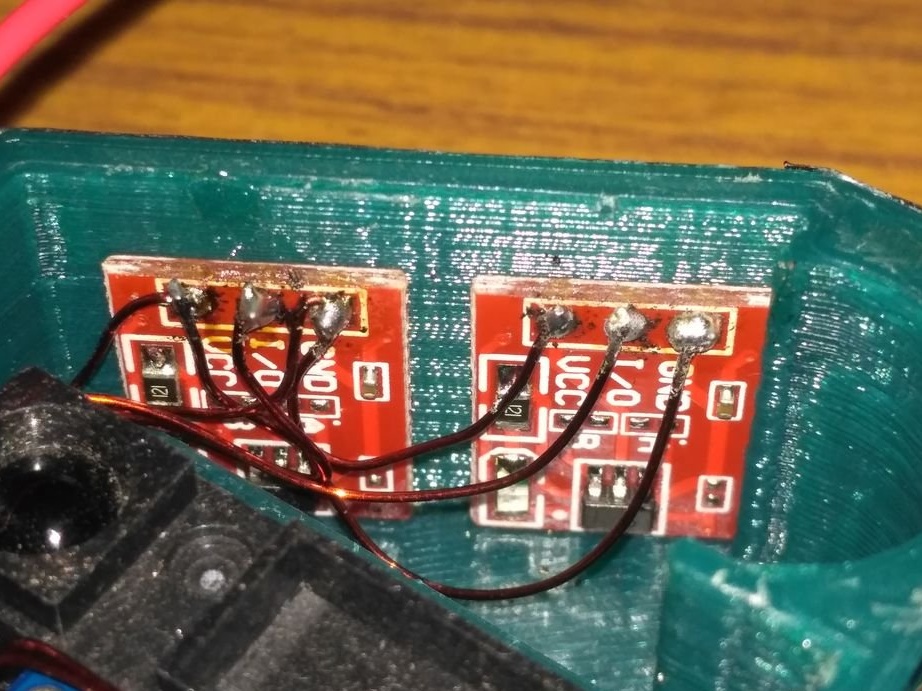
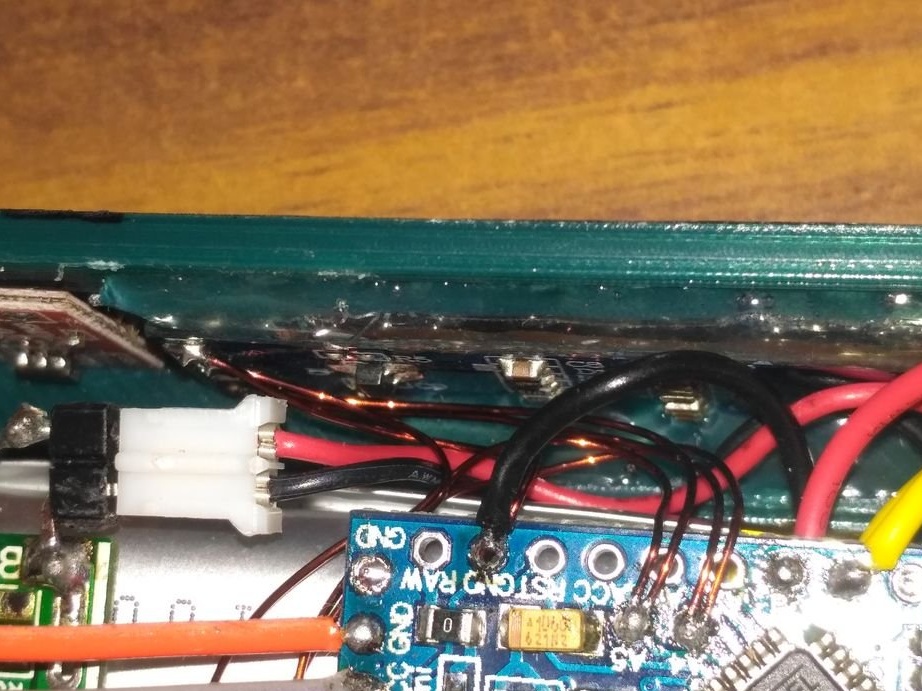
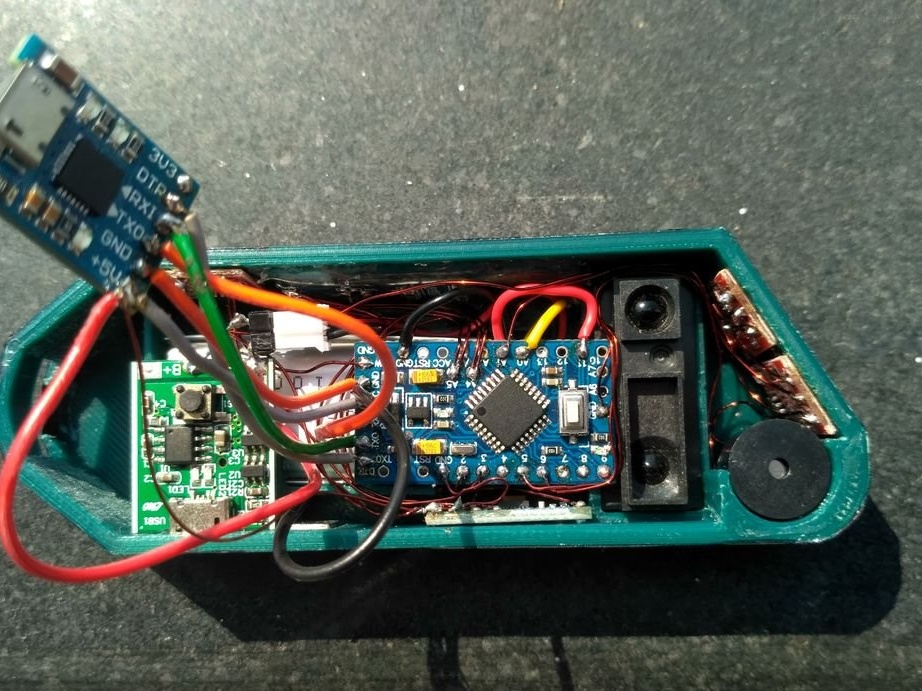
Denna modul har både en batteriskyddskrets och en boostkonverterare 5 V, 1 A. Den har också en på / av-knapp som kan användas som strömbrytare. USB-uttaget på modulen togs bort med hjälp av ett lödkolv och de två trådarna löddes till + 5 V-terminalerna och marken, som visas på det fjärde fotot.
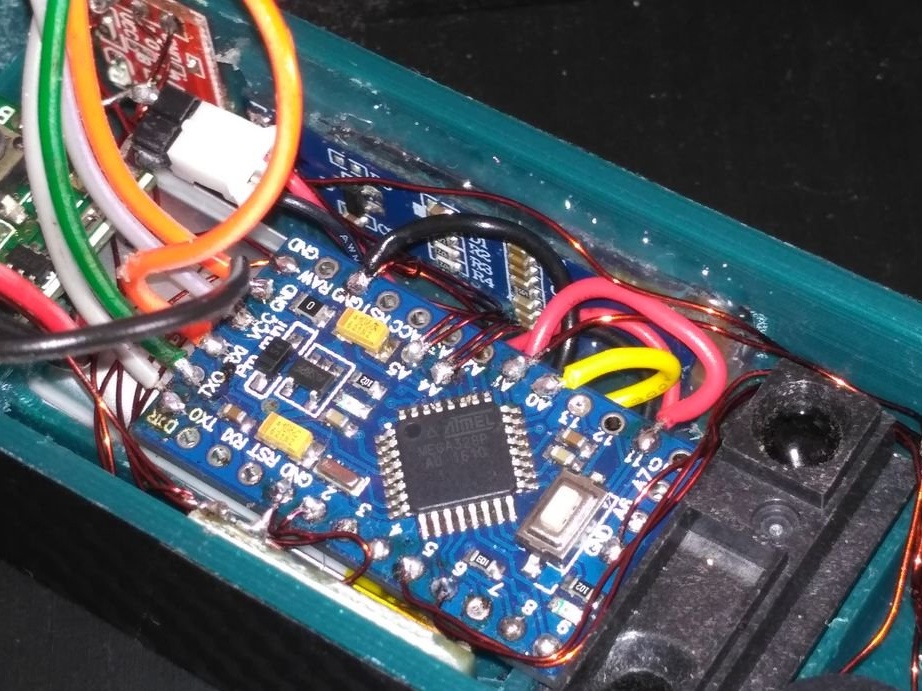
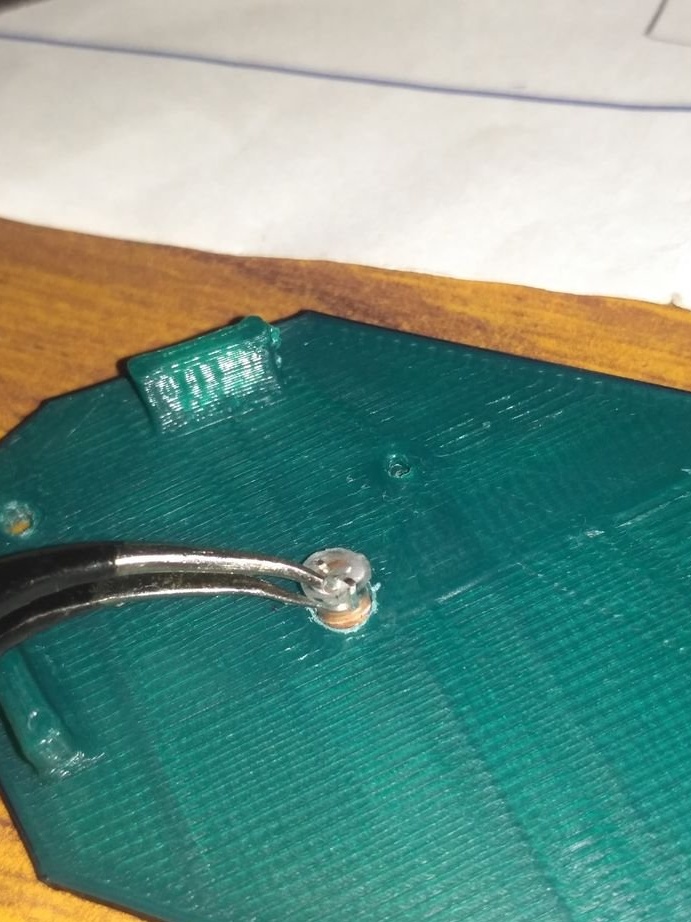
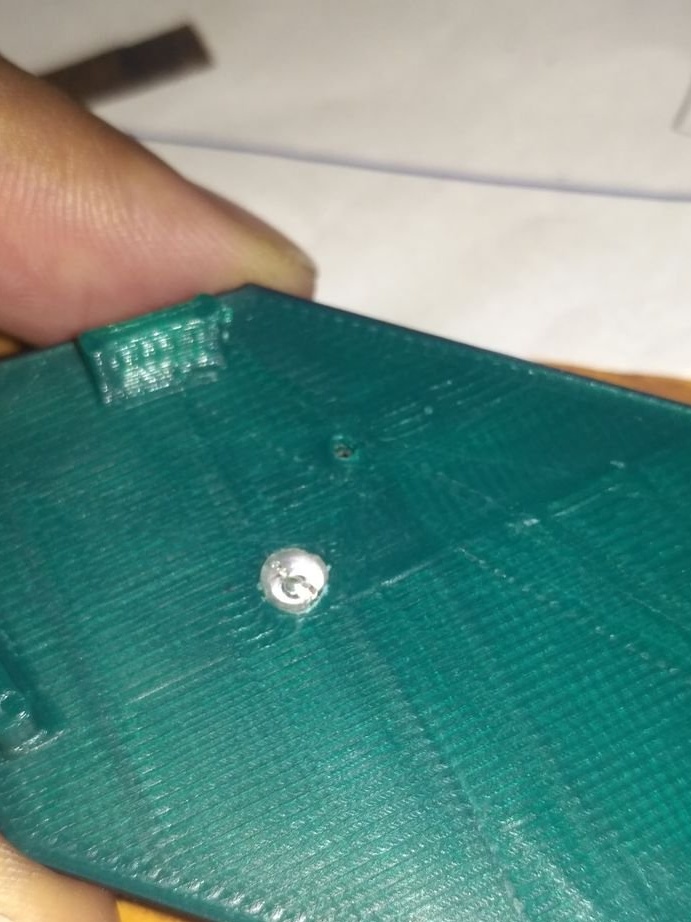
Därefter måste du löd de två kontaktanslutningarna till B + och B-, som visas på de två första fotona, och kontrollera sedan om modulen fungerar med batteriet.
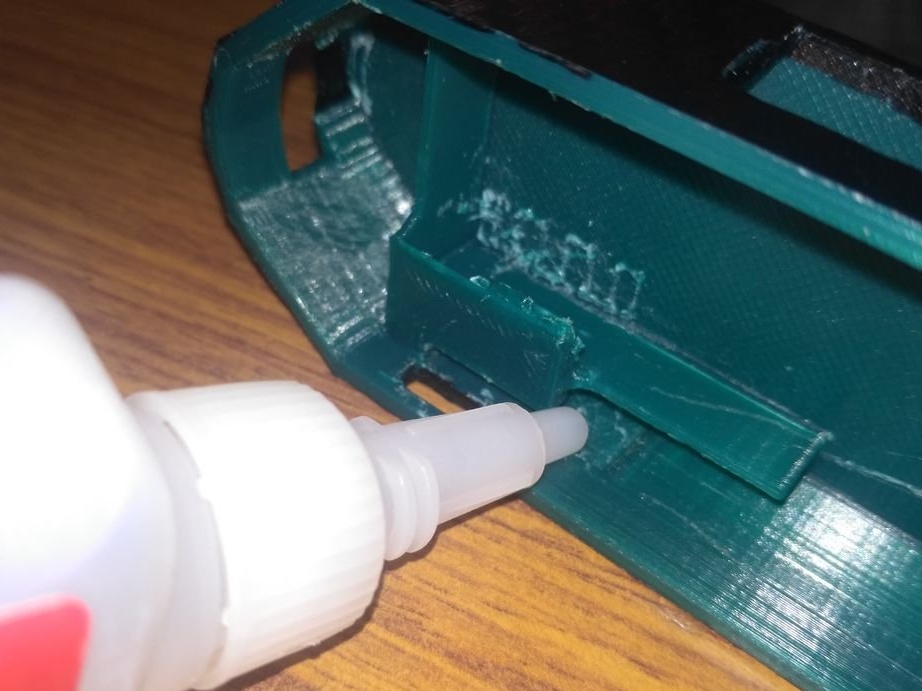
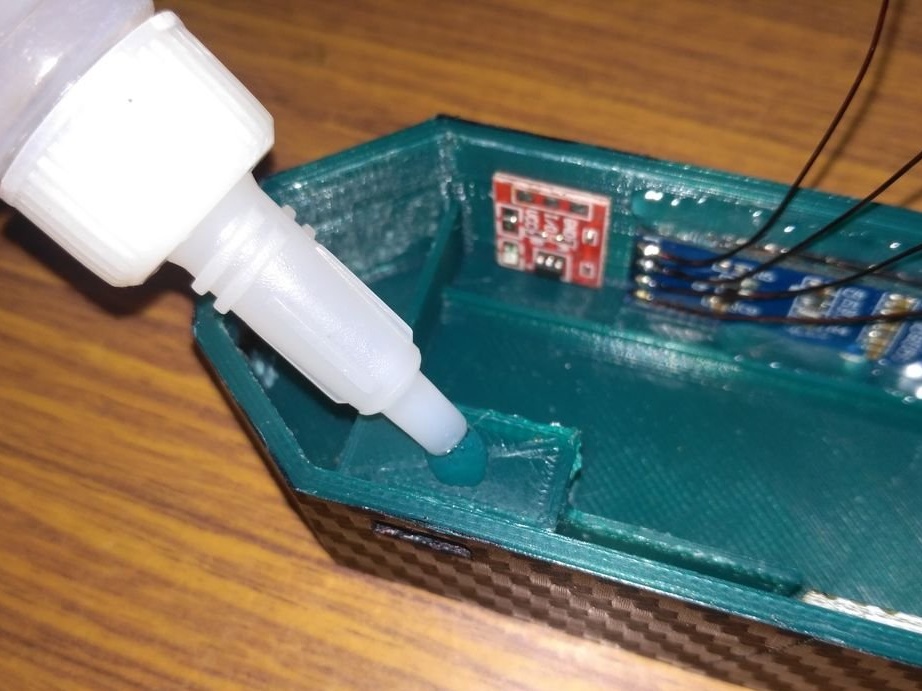
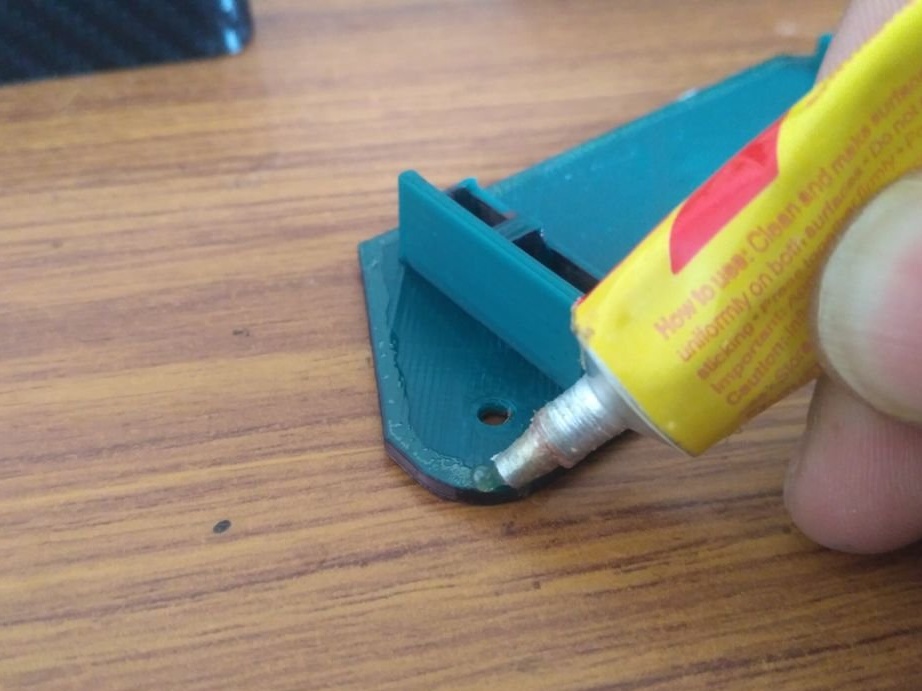
Nu måste du applicera lim på plattformen som tillhandahålls för modulen och placera modulen noggrant och se till att laddningsporten och hålet är exakt installerade i hålen.

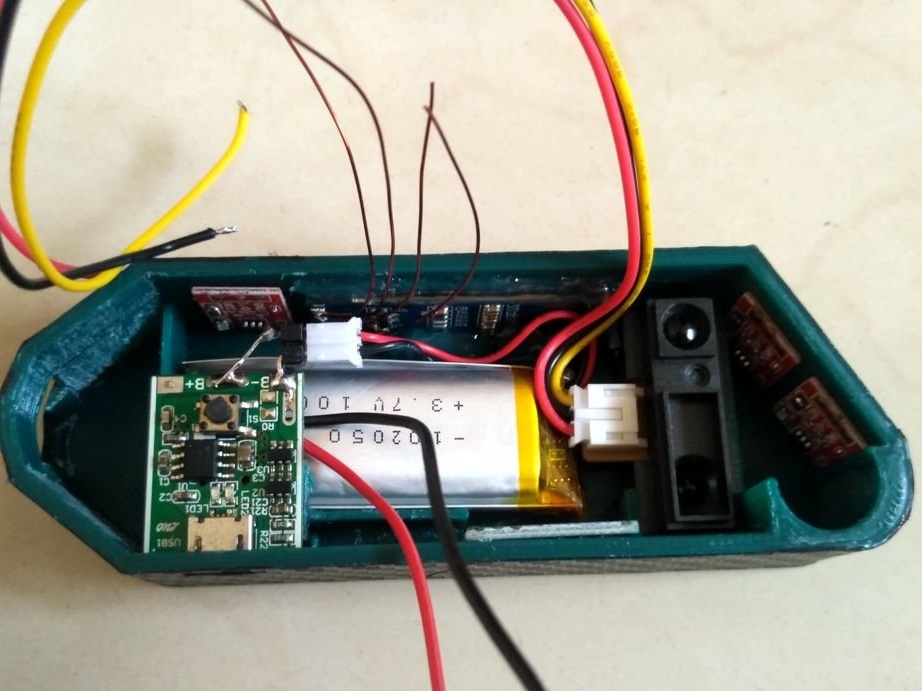
Steg åtta: Installera batteri och IR-sensor
Lödtrådar till displaystiften. Installerar batteriet och IR-sensorn.

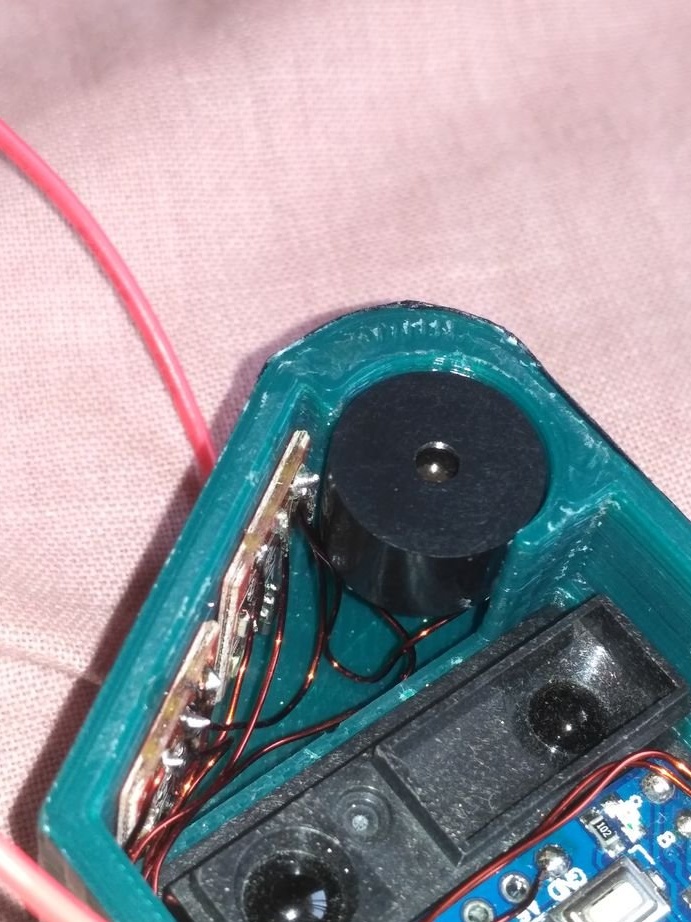
Steg nio: summer och laddningsmodul
Enligt schemat monteras den laddningsmodulen och summern.

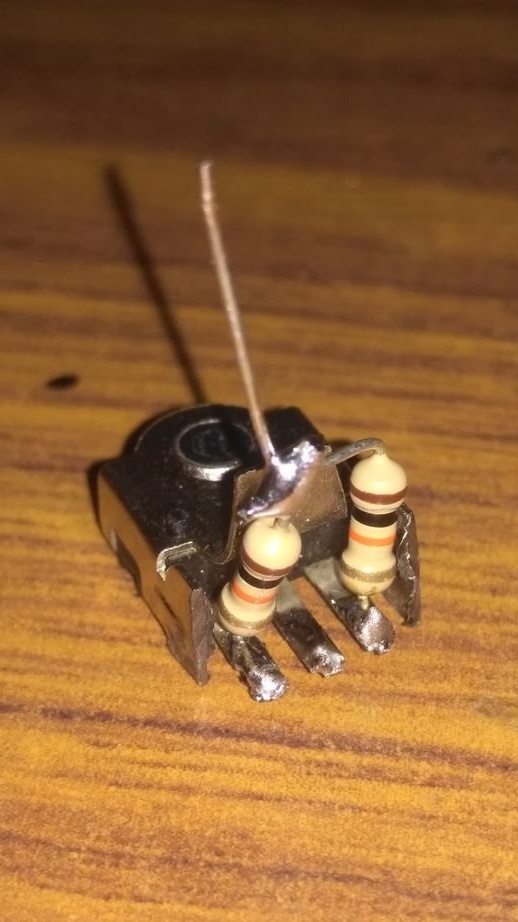
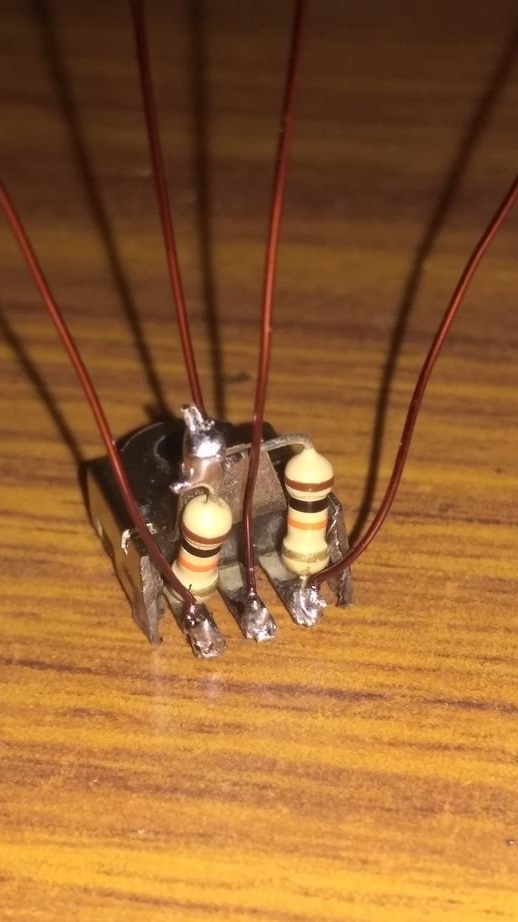
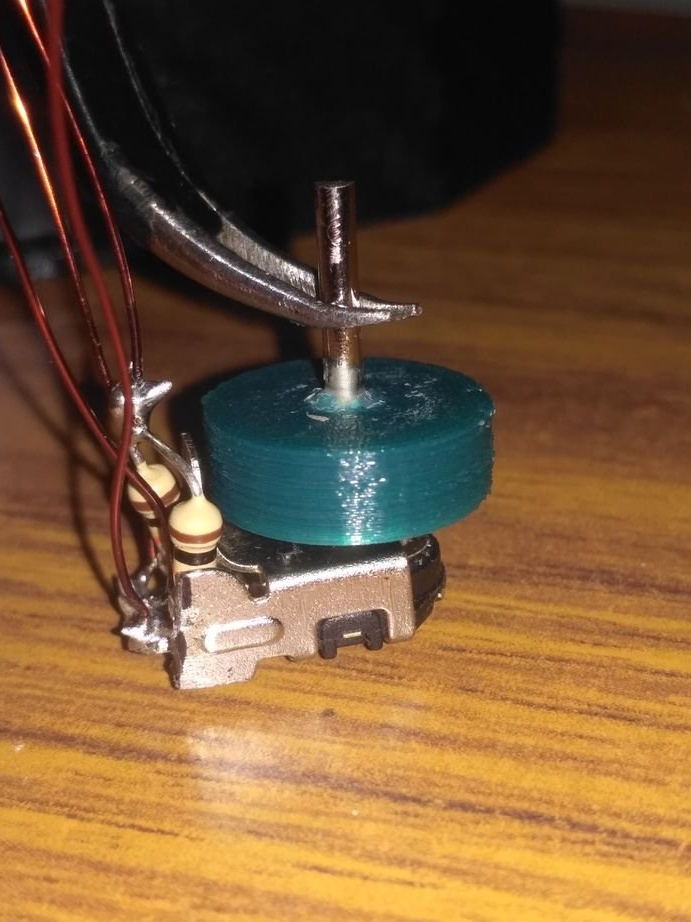
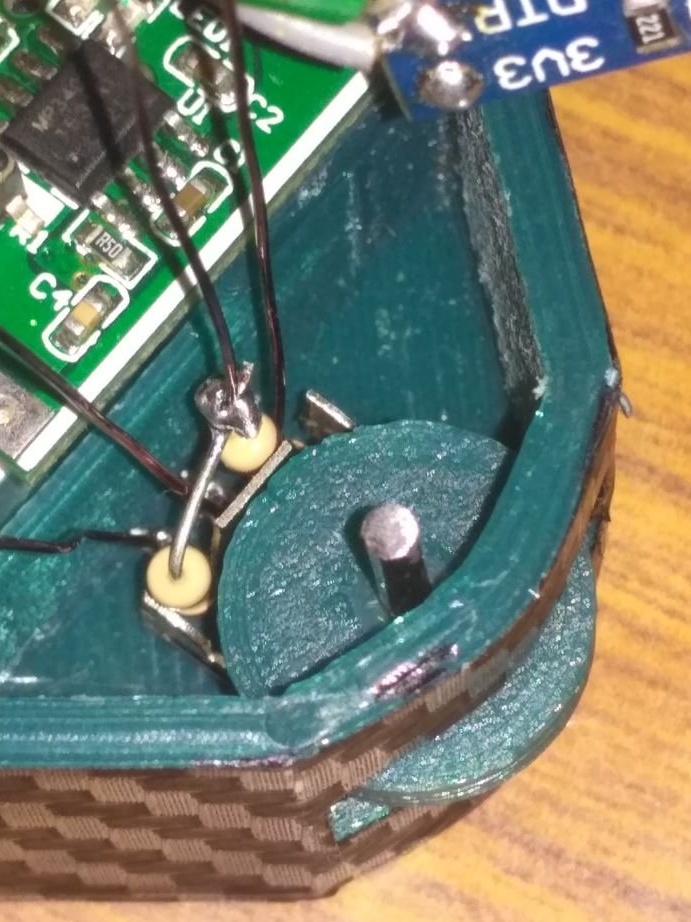
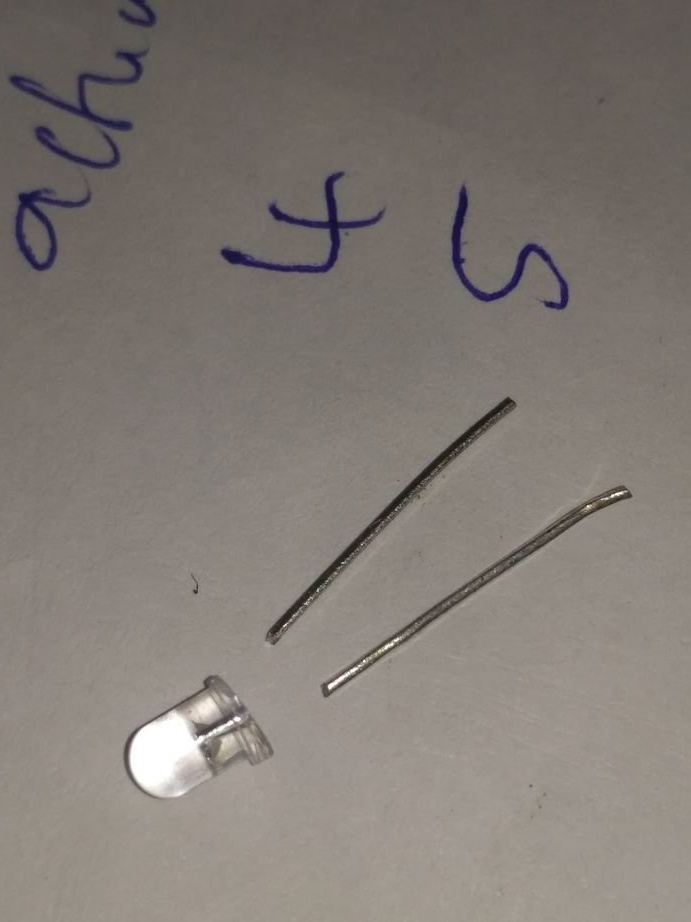
Steg tio: kodare
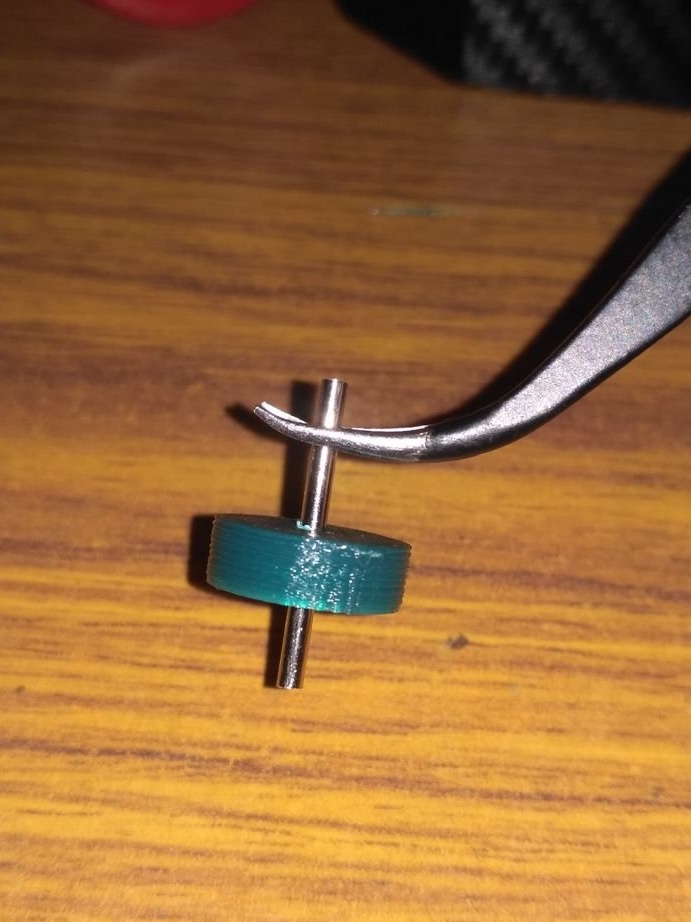
Enligt schemat monteras kodaren. Sätt i stålaxeln i kodaren och hjulet. Den använder superlim för att fixa axeln och hjulet. Installerar en kodare med ett hjul inuti huset.




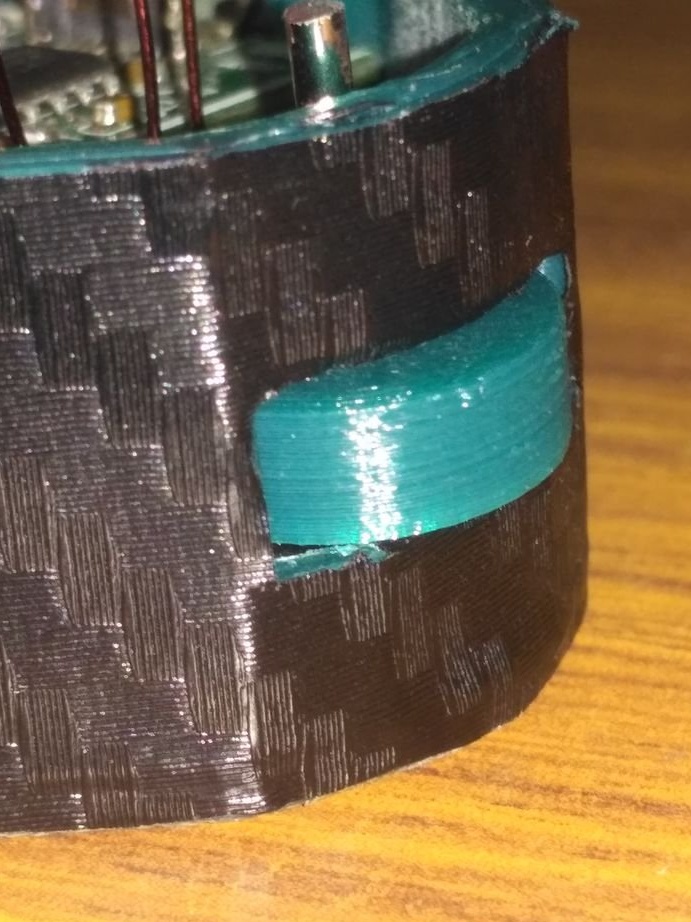
Steg elva: Installation
Fixar sensormoduler. Enligt kretsen monteras ledningarna. Under installationen är det nödvändigt att se till att ledningarna inte faller under hjulet och inte täcker IR-sensoröversikten.


Steg tolv: Ladda ner kod
Laddar kod och bibliotek.
final_code.ino
Adafruit_SSD1306-master.zip
Adafruit-GFX-Library-master.zip
SharpIR-master.zip

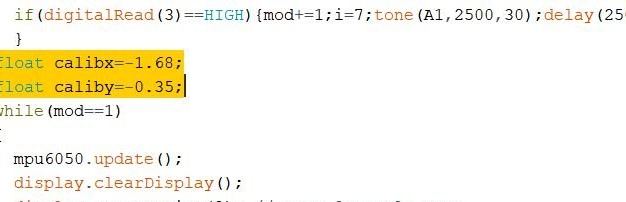
Steg Tretton: Kalibrering
Först kalibreras gyroskopet. Eftersom MPU6050-accelerometer / gyroskopmodul helt enkelt är limmad på kroppen kan det hända att den inte är helt platt. För att korrigera detta fel utförs därför följande steg.
1. Anslut enheten till datorn och placera den på en plan yta.
2. Växla till LEVEL-läget på enheten genom att trycka på “M” -knappen och skriva ner X- och Y-värdena.
3: Tilldela dessa värden till variablerna "calibx" och "caliby" i koden.
4: Ladda ner programmet igen.



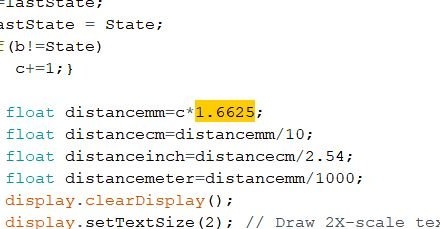
Beräknar nu avstånd per hjulvarv.
Antal steg per varv av kodaraxeln, N = 24 steg
Hjuldiameter, D = 12,7 mm
Hjulomkrets, C = 2 * pi * (D / 2) = 2 * 3,14 * 6,35 = 39,898 mm
Därför kördes avståndet per steg = C / N = 39.898 / 24 = 1.6625 mm.
Steg fjorton: Testa
Innan hushöljet installeras testar det sensorer, laddningsmodul, knappar, display.



Steg femton: Knapp- och målmontering
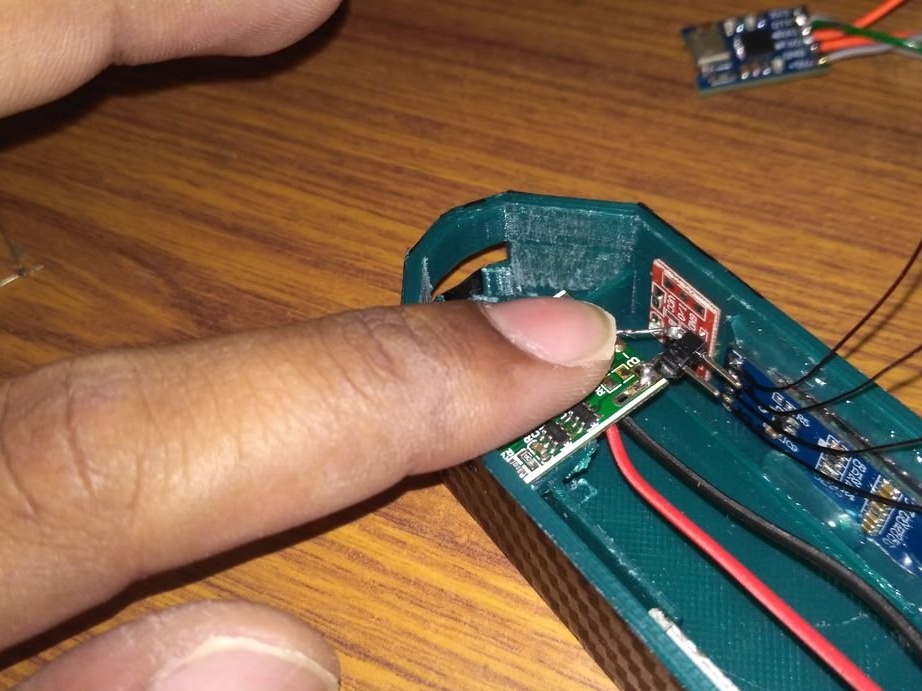
Strömbrytaren på laddningskortet är kort och befälhavaren, klippa benen, ställer in en extra LED som trycker på knappen.



Limmar två halvor av kroppen.





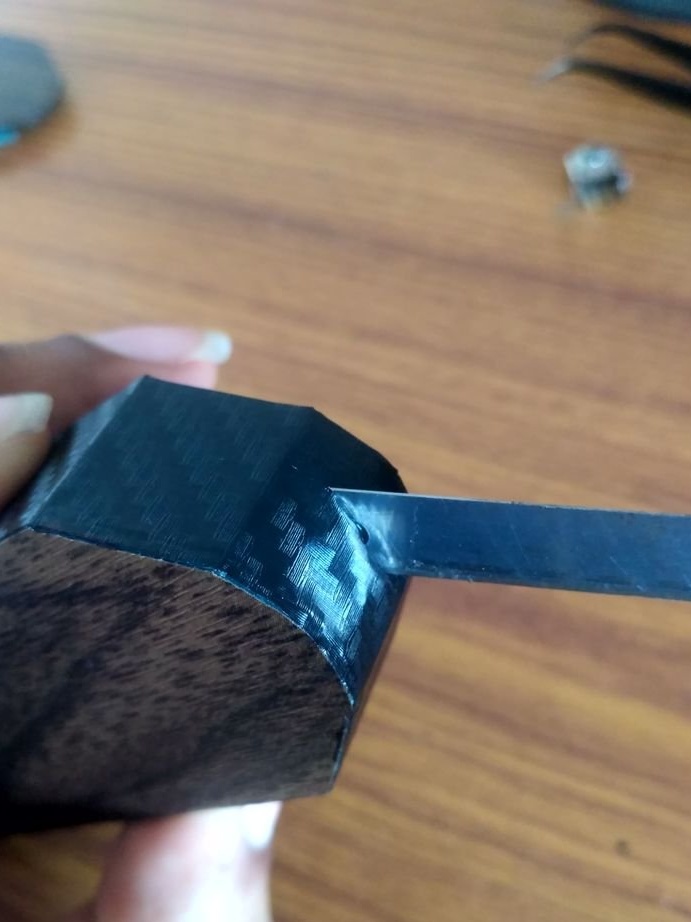
Steg sexton: markera knapparna
Bokstäverna klipptes på en laserskärare och limmades sedan på kroppen.




Allt är klart, det återstår bara att testa enheten i drift.