

När toppen roterar, förvandlas dess kinetiska energi gradvis till värme och snart stannar den. hemgjorda produkt, som föreslagits av författaren till Instructables under smeknamnet HowToEngineer, kompenserar för friktionsförluster på grund av energiförsörjningen från utsidan. Spinntoppen snurrar kontinuerligt tills det stör användaren själv och han stänger av enheten.
Anordningens driftprincip är baserad på interaktion mellan magneter:
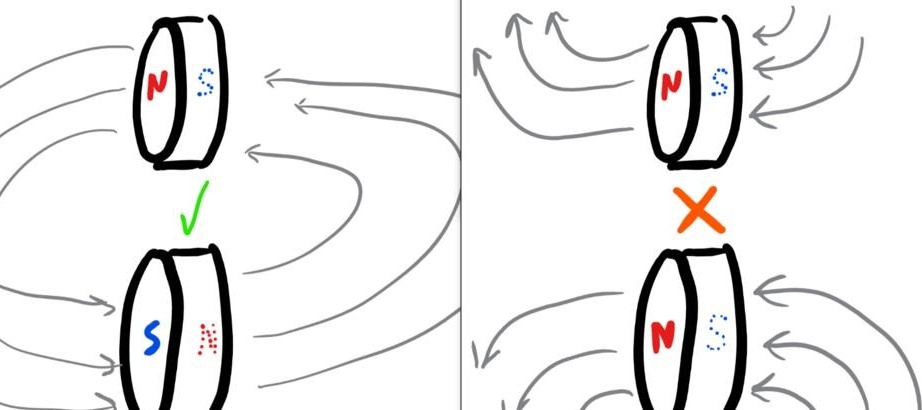
Utanför - en magnet murad i en topp, inuti - en magnet på en skiva som drivs till rotation av en elmotor. Läsare som föreslog att flera elektromagneter används i designen, växelvis påslagen av Arduinokommer att bli besviken. Eller vice versa, de är glada om de anser att detta är över-engineering. Regulatorn för den elektriska motorens rotationshastighet är ett trådmotstånd.
Följande är några detaljer om enheten: en strömbrytare, en tråd (obligatorisk) variabel motstånd (betyg från 25 till 100 ohm är lämplig), en elmotor, en tunnsträngad tråd, precis under allt detta är två magneter, och runt ... en galge. Var inte förvånad, det är väldigt bekvämt att göra toppen av toppen. Om du biter en mycket liten bit ståltråd från den kan du till och med använda den vidare för det avsedda syftet.

Naturligtvis utan verktyg kan du inte. Och om du har en 3D-skrivare och en tvåkomponent epoxiharts finns det jobb för dem.

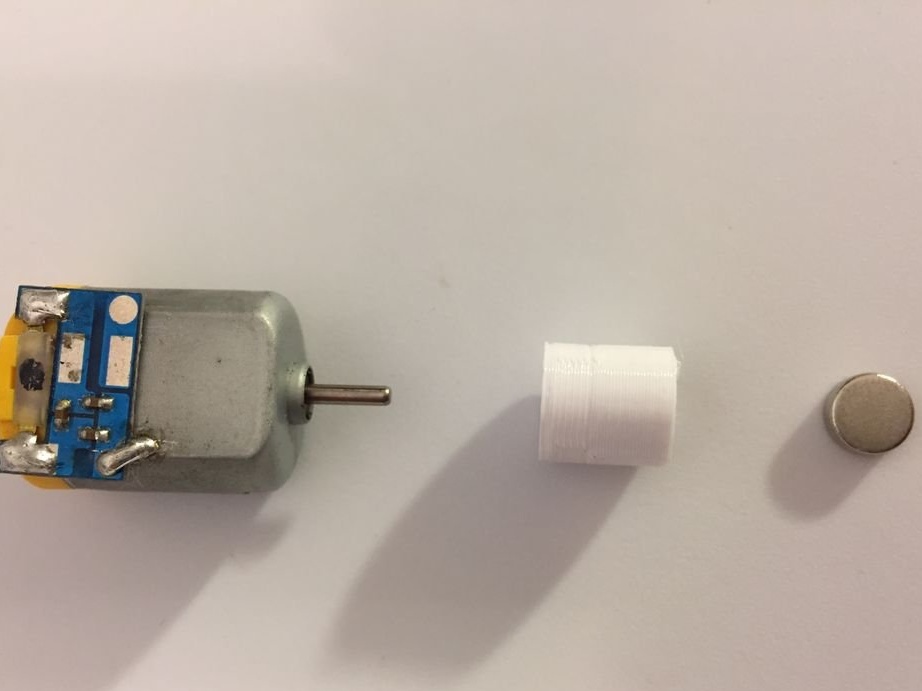
Efter att ha utvecklat alla 3D-tryckta delar laddar guiden upp två arkiv, varav en innehåller alla filer i FreeCAD-formatandra - alla STL-filer. Sedan samlar den den elektriska delen av enheten:

Fäst en magnethållare på motoraxeln, i vilken magneten är monterad, och limmar den med epoxi. Medan den torkar bör det inte finnas några föremål i närheten som kan locka magneten och därigenom dra den ut ur adaptern. Harts får inte tillåtas komma in i motorlagret - det kan inte rotera. Polariteten måste väljas så att motorn roterar medsols när den ses ovanifrån. Om du är vänsterhänt - moturs.
Installerar allt i fallet, nästa foto visar hur exakt magneten finns i adaptern. Det blir också tydligt vad man ska göra med en motorfäste och en adapter om det inte finns någon 3D-skrivare. Handtaget för det variabla motståndet kan tas med alla lämpliga, färdiga eller hemmagjorda.

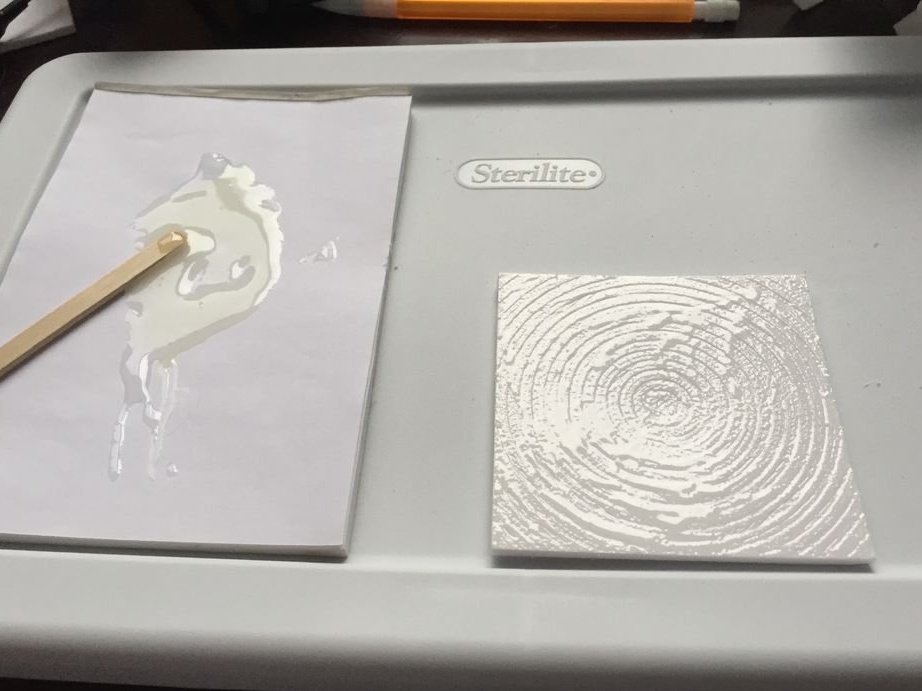
Ytan på vilken den roterande toppen roterar omedelbart efter 3D-utskrift är inte lämplig för detta. Befälhavaren polerar det, applicerar ett epoxylager, härdar det, polerar det igen och applicerar ett andra lager. Efter härdning erhålls en slät yta.
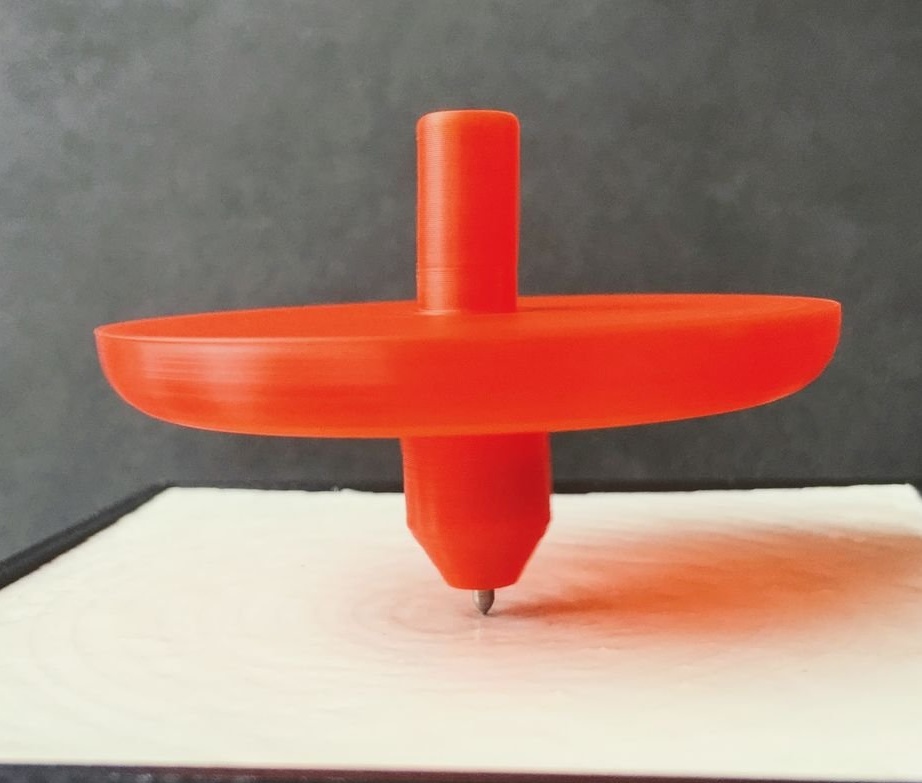
Den färdiga delen stänger fodralet och enheten är klar:

I 3D-tryckta toppar (de kan också tillverkas på annat sätt) installeras magneter, täcker dem med cylindrar och tätningar:
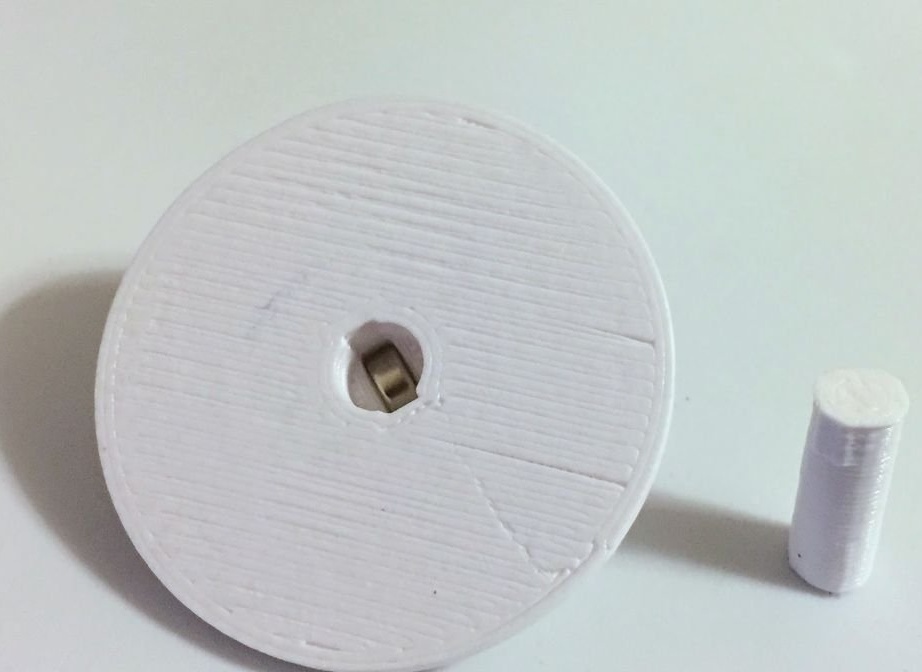
En av de två topparna har redan en plastspets. Du kan använda det direkt, men det blir snabbt tråkigt - du måste slipa det. För den andra toppen, kapar kaparen en liten bit ståltråd från galgen:

Vässar den, borrar ett hål i toppen, klistrar in den resulterande spetsen där:
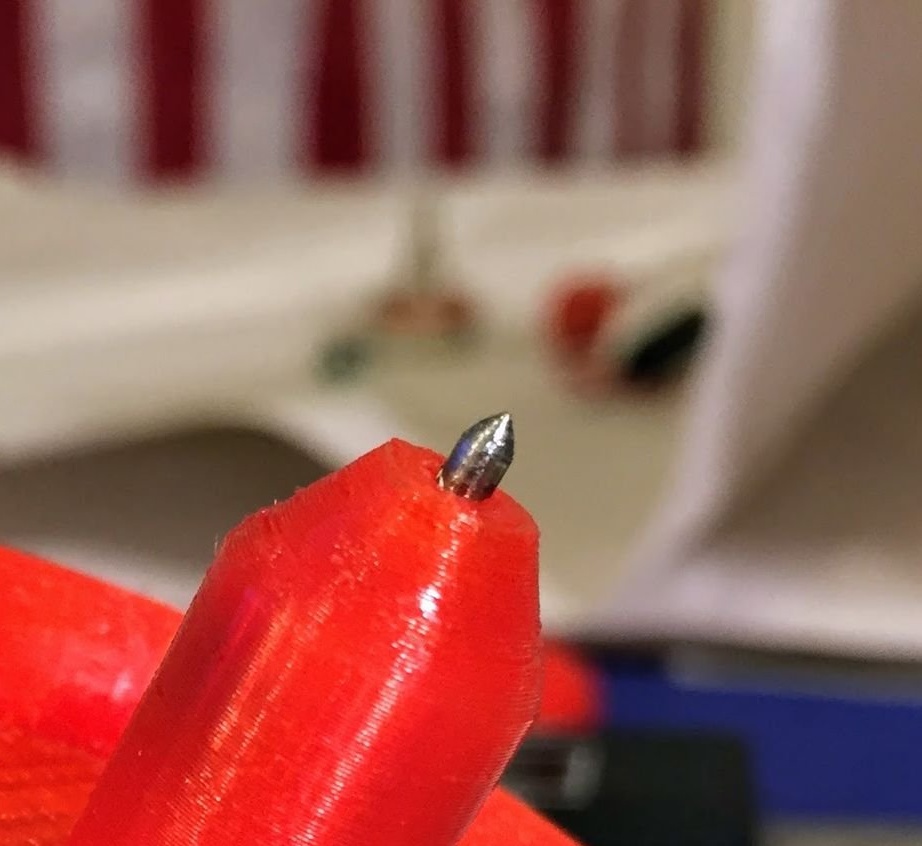
Båda snurrarna är redo:

Om ytan för toppens rotation inte skapas med 3D-utskrift, utan på något annat sätt, och det visar sig vara omedelbart slät, måste den slipas och beläggas med epoxi som beskrivits ovan i alla fall. Annars kommer det att slitas ut snabbt från inverkan av en metallspets. I vilket fall som helst är det nödvändigt att tillhandahålla möjligheten att lirka den här delen och ta bort den för att komma åt batterifacket.
Befälhavaren vrider det variabla motståndet till ett minimum, sätter toppen på ytan, lossar toppen, slår på kraften, roterar försiktigt det variabla motståndet tills friktionen i lagren är övervunnen - motorn börjar rotera. Den ökar hastigheten något och minskar sedan tills motorvarvtalet sammanfaller med toppens hastighet. Det är synkroniserat med motorn, det kommer att märkas av en kraftig ljudändring. Nu kan du öka hastigheten till önskad. Den roterande toppen roterar tills enheten är avstängd, eller tills batterierna / ackumulatorerna har laddats ut, borstarna, motorlagren är slitna och den första toppen har också en spets. Alla fel är enkla att fixa och allt fungerar igen. Du kan också tillhandahålla en ingång för en 5 V PSU och en pulsstabilisator för att konvertera denna spänning till 3,3 V, och även använda en PWM-regulator istället för ett variabelt trådmotstånd.