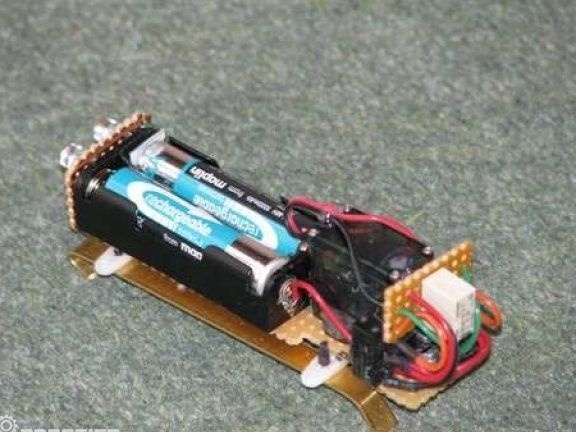
Carpet Crawler är en liten robot som tillhör BEAM-klassen. sådan robotar inkluderar omedelbart två sådana element som estetik, biologi, elektronik och mekanik. Tack vare denna strategi imiterar sådana robotar levande varelser så mycket som möjligt, ibland verkar det som om de kan tänka.
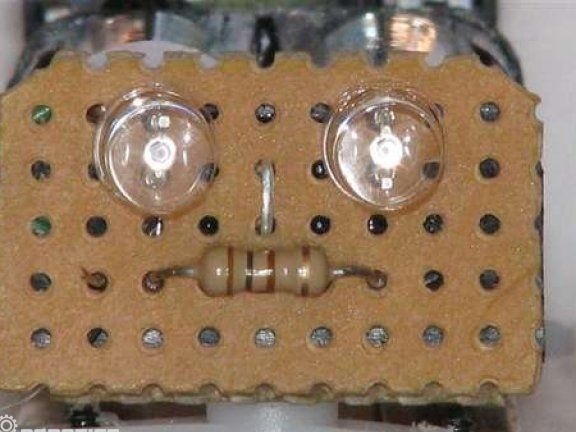
Som hjärna för sådana robotar används reläer sensorer och switchar och rörelser hemgjorda produkt på grund av servomotorn. AAA-batterier används som ström. Som ögon som brinner starkt installeras två lysdioder.
Material och verktyg för tillverkning:
- mässingsremsa som mäter 1/32 "x 1/4" x 8 ",
- två bitar av kopparremsor;
- M2 muttrar och bots;
- servomotor (Micro RC (7,5 g));
- två mikrobrytare (kan erhållas från gamla enheter);
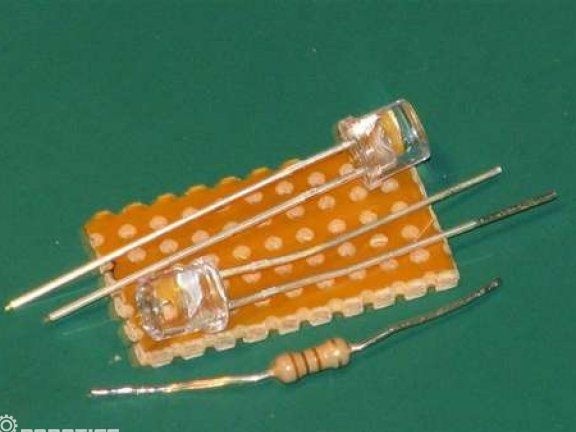
- två lysdioder (det är bäst att använda rött, eftersom vitt eller blått i detta fall kan fungera);
- ett 100R-motstånd (om lysdioderna är gula eller gröna, då 47R);
- två AAA-batterier och en hållare för dem;
- tunn ledning.




Tillverkningsprocess:
Första steget. Ändring av servomotorn
Servomotorn är utformad på ett sådant sätt att den under drift gör impulsiva rörelser. I det här fallet måste den göras om så att den fungerar vid rotation. Det finns två sätt att göra detta.
I det första fallet kan du spara hastighet och riktning från motorstyrning såväl som styrelektronik. Enheten kommer fortfarande att behöva inkommande pulser för att fungera.
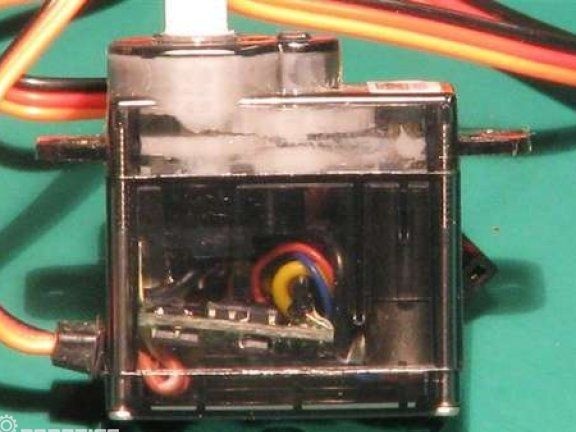
Författaren gick andra vägen. Det är nödvändigt att avskära växelns stoppelement. Då måste växlarna fodras upp, det kommer att vara svårt att sätta tillbaka dem om sekvensen går förlorad. Vid demontering måste servomotorns yta smörjas med silikonfett.
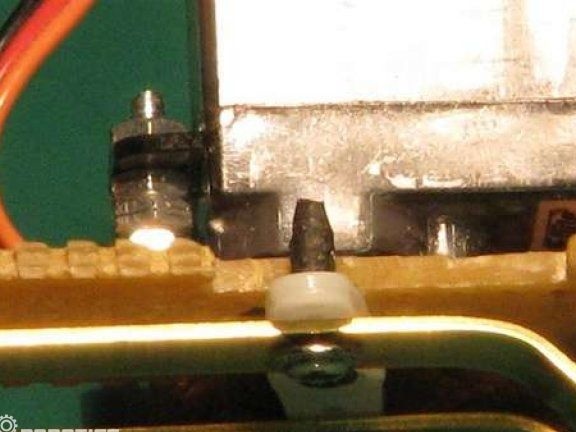
Bilden visar RSV-styrmekanismen som måste flyttas.

När du har tagit bort kortet måste den röda ledningen bytas till exakt den röda ledningen i motorn. Trådar ska försiktigt lindas med elektrisk tejp för att undvika kortslutning.

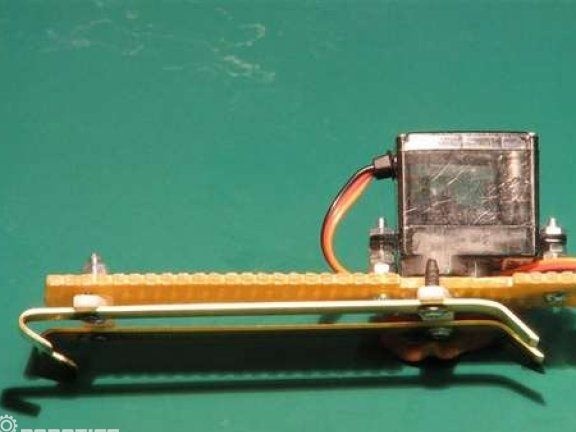
Steg två Skapa den mekaniska delen
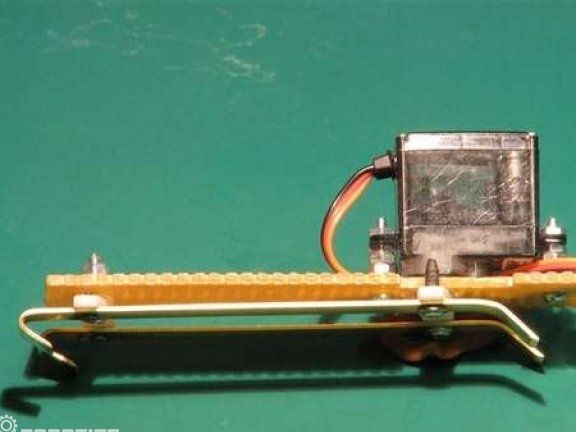
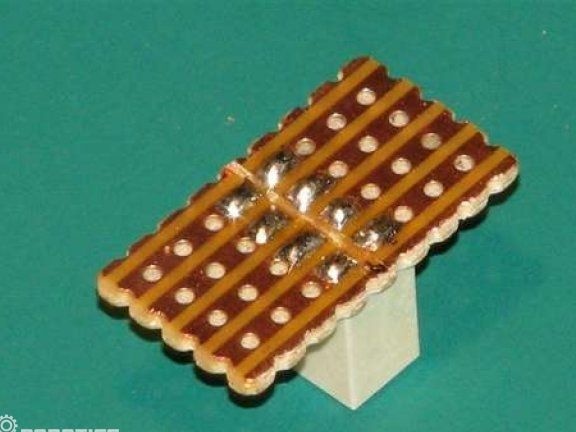
På arbetsbordet måste du borra flera hål och sedan installera reläet på batteriets baksida.För montering av servomotorn används 2 mm bultar.
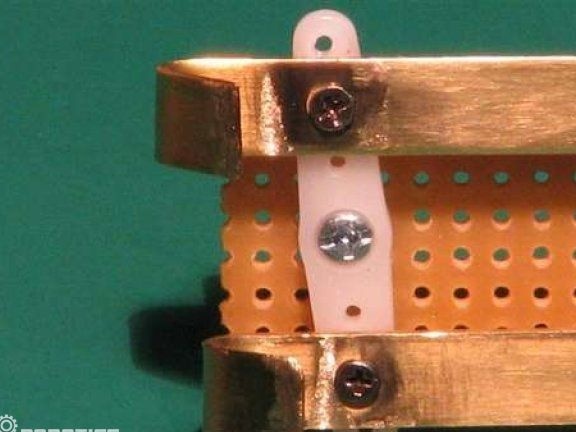
Robotens ben är gjorda av solida kopparplattor, för detta skärs de först i bitar med en viss längd och gör böjningar. Tack vare sådana avböjningar kommer roboten att hålla fast vid vägen och krypa. Fäst plattan med små skruvar.


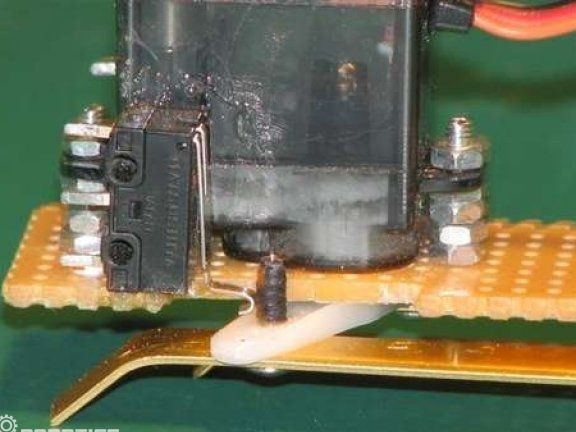
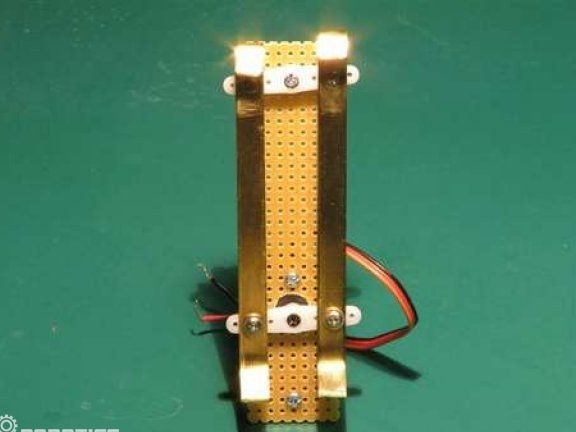
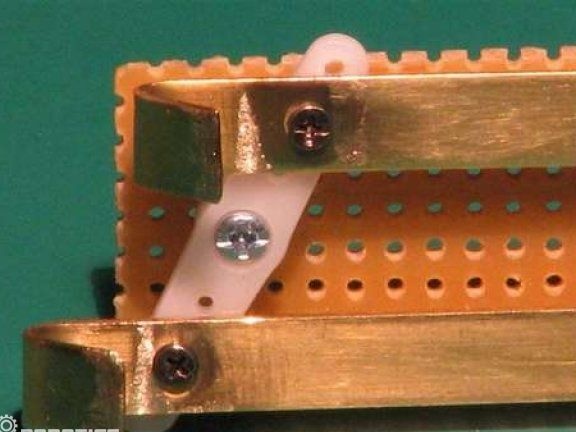
För att kontrollera benen måste du ställa in omkopplarna. De är fästa vid servomotorn med lim.
Steg tre Robot elektronisk krets
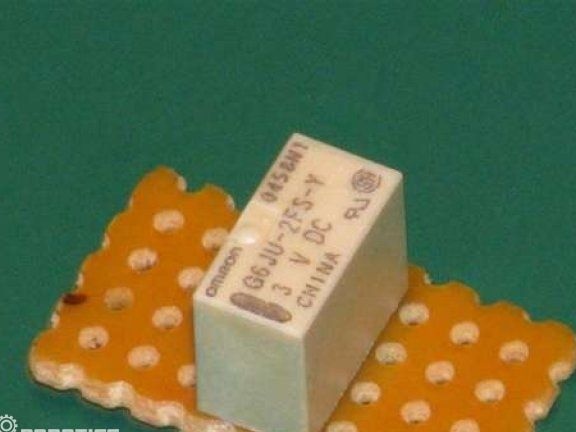
Huvudkomponenten i arbetet med hemmagjord kan betraktas som en reläspärr som fungerar när den kopplas bort från spolen. Reläet kommer att ändra rörelse, men det kommer att förbli på ett ställe tills nästa sväng.
Pulserna till spolarna kommer från två mikrobrytare, de slås på när antennens relä kommer att träffa omkopplaren.

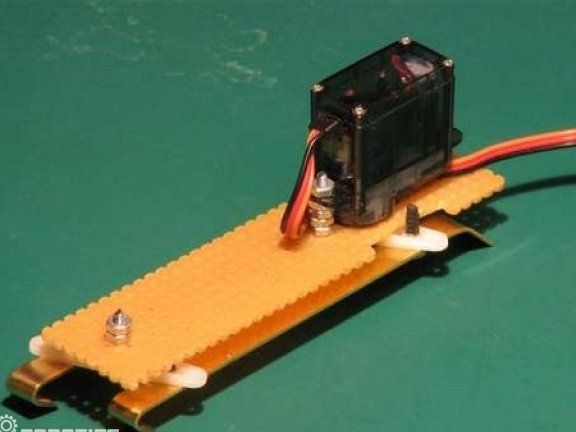
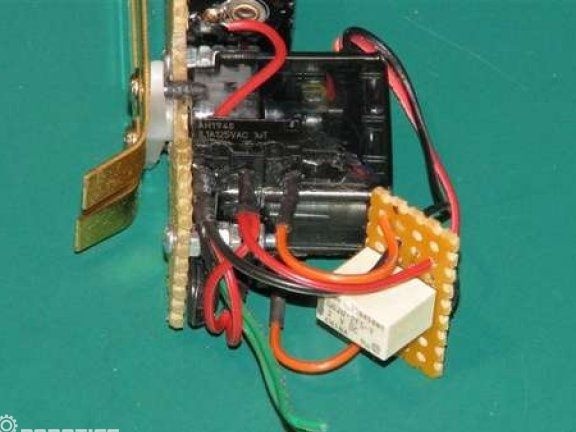
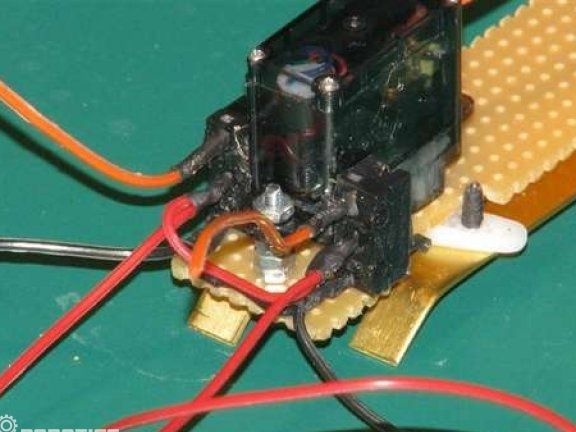
Steg fyra Montering av den elektroniska delen
Reläet är monterat på ett skrot på en platta, så det är lättast att ansluta. Hela processen för att ansluta elektronik visas på fotot.





Det är allt, nu är roboten klar. Det bästa av allt är att han verkar vara själv på mattan, eftersom den är utformad specifikt för sådana platser. Först ska roboten tända lysdioderna, och sedan kryper den långsamt längs golvet.