

Projektet inleddes i februari 2015. först roboten linjen för "Antei" var "Domovenok" - en robotborste. Senare dök upp "Antei 1".
Anteya-plattformen är ett fall som är utrustat med en styrenhet Arduino Uno, sensorer och instrument för olika funktioner. Antei kan också bli en dammsugare, en hushållskombinera, en vakthavende robot etc.
Men huvuddelen av Antey är avskiljningen av "myror" som rör Antey.
Principen för drift av vårt komplex hämtades från naturen själv. Varje sk myr kan röra sig oberoende men kan också utföra kollektivt arbete. Samtidigt kan de inte bara lyfta en belastning som är mycket tyngre än vikten utan kan också flytta otroligt stora laster för dem.
Var och en av vår myra är utrustad med en vibrationsmotor. Detta är en ganska outforskad form av framdrivning. Fördelarna är uppenbara. För det första är denna typ av framdrivning mer ekonomisk i energiförbrukning. För det andra är den kompakt till skillnad från andra typer av motorer, men den ger anständiga prestanda.
Vi fick reda på att varje "myra" med en vikt på 8 gram. kan dra 89 g., vilket indikerar att han kan bära vikt 11 gånger sin egen.
Sedan Antei skapades har det varit en fråga om antalet vibrationsmotorer, hur de är belägna på robotens plattform och från vad myrbenen (en tandborste eller gummiben) bör göras. Många alternativ har testats.
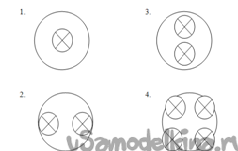
Men det beslutades att etablera 2 rader med 3-4 myror på gummiben på varje sida av plattformen, medan de måste vara i en styv koppling med varandra.
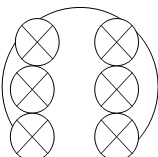
I denna utföringsform uppnås en säker framåtrörelse, och när vissa motorer stängs av utförs en svängning till sidan.


Vår Antey
