


Så låt oss komma igång. Först måste du bestämma om komponenter och kretsar. Kretsens driftprincip är enkel: en svag signal från mikrofonen förstärks och skickas till den Arduino analoga stiftet. Som förstärkare kommer jag att använda en operationsförstärkare (komparator). Det ger en mycket högre förstärkning jämfört med en konventionell transistor. I mitt fall kommer LM358-chipet att fungera som denna komparator, det kan hittas bokstavligen var som helst. Och det kostar ganska billigt.
Om du inte kunde hitta LM358 kan du i stället sätta någon annan lämplig driftsförstärkare. Till exempel stod komparatorn som visas på fotot på förstärkarkortet för den infraröda mottagarsignalen i TV: n.

Låt oss nu titta på sensorkretsen.
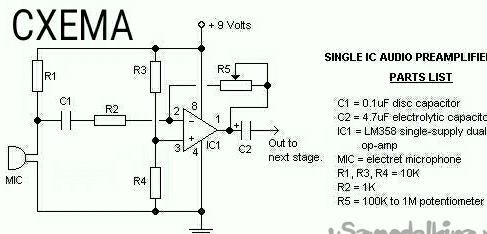
Förutom den operativa förstärkaren behöver vi några lättare tillgängliga komponenter.
Den vanligaste mikrofonen. Om mikrofonens polaritet inte visas, titta bara på dess kontakter. Minus en går alltid till fallet, och i kretsen är den följaktligen ansluten till "marken".

Därefter behöver vi ett motstånd på 1 kΩ.
Tre motstånd på 10 kΩ.

Och ytterligare 100 kΩ motstånd är 1 MΩ.
I mitt fall används ett 620 kOhm-motstånd som det "gyllene medelvärdet".
Men helst måste du använda ett variabelt motstånd med rätt betyg. Som visas av experiment ökar dessutom en större klassificering bara enhetens känslighet, men mer "brus" visas.

Nästa komponent är en 0,1 uF kondensator. Det är märkt "104".

Och en annan kondensator, 4,7 uF.
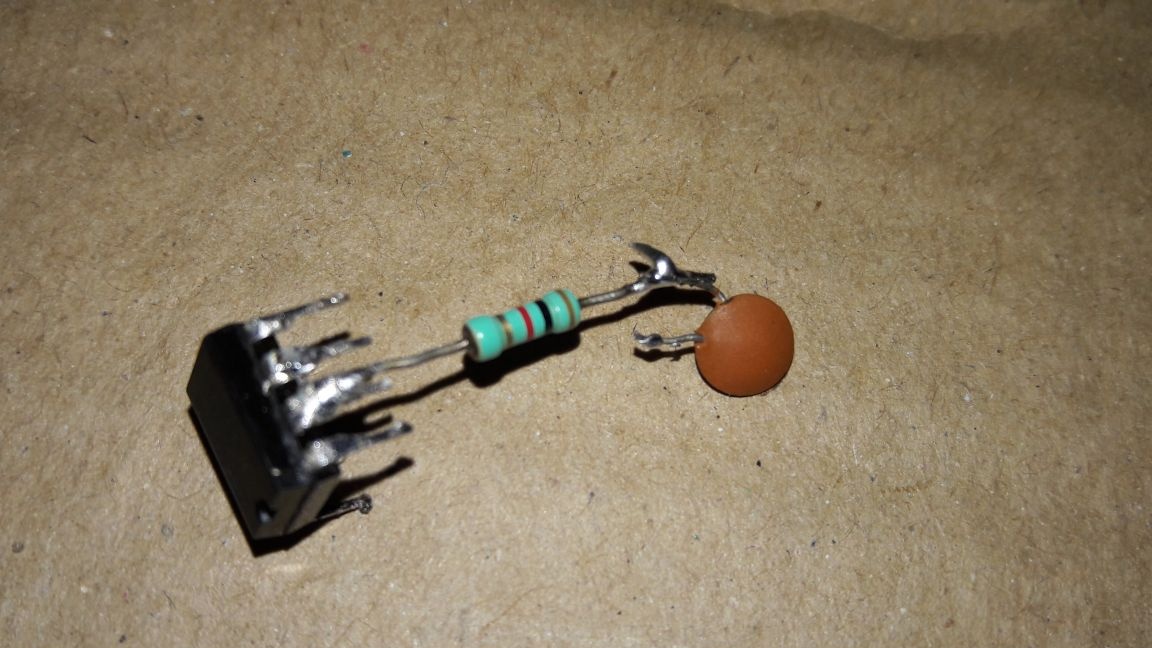
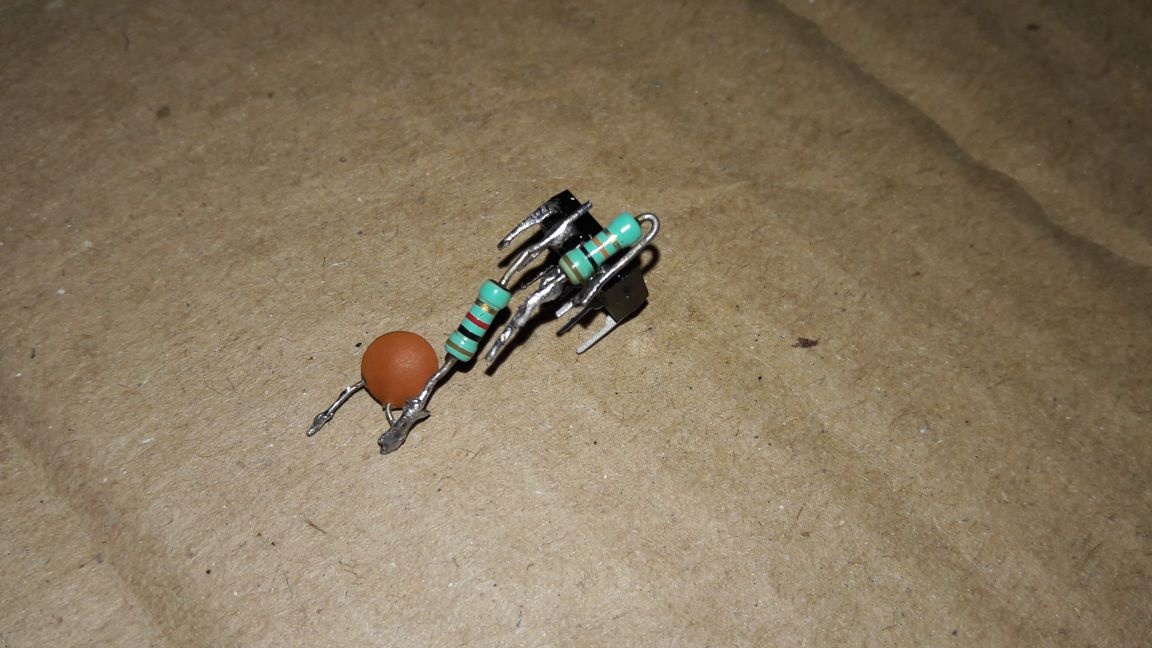
Nu passerar vi till mötet. Jag monterade kretsen med en monterad installation.








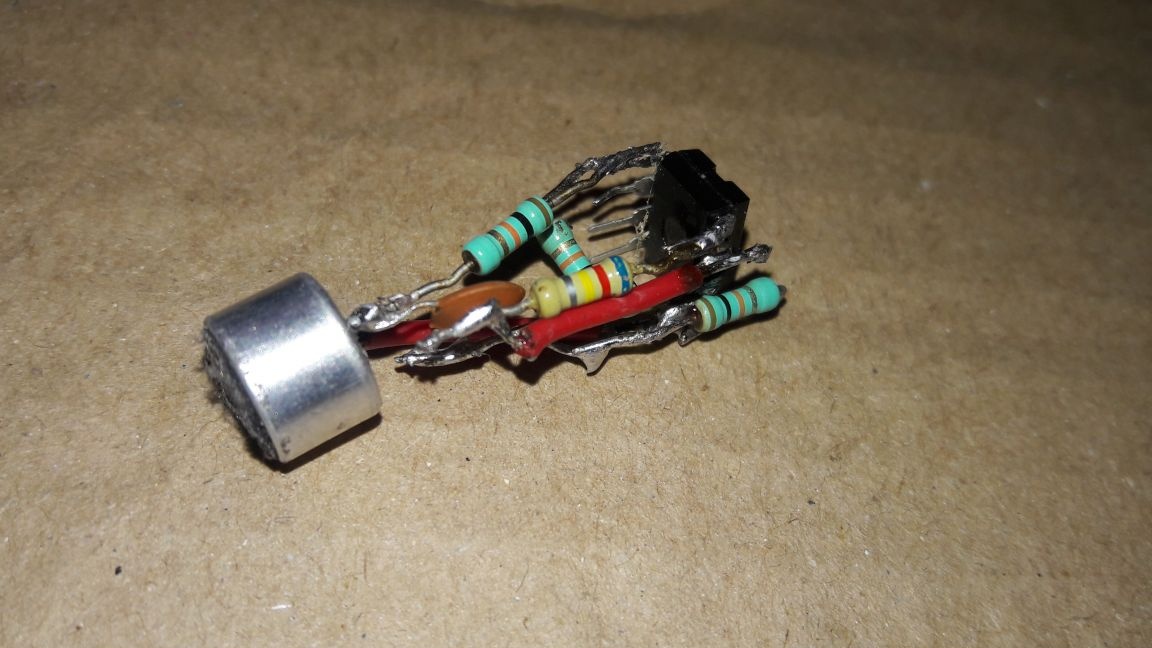

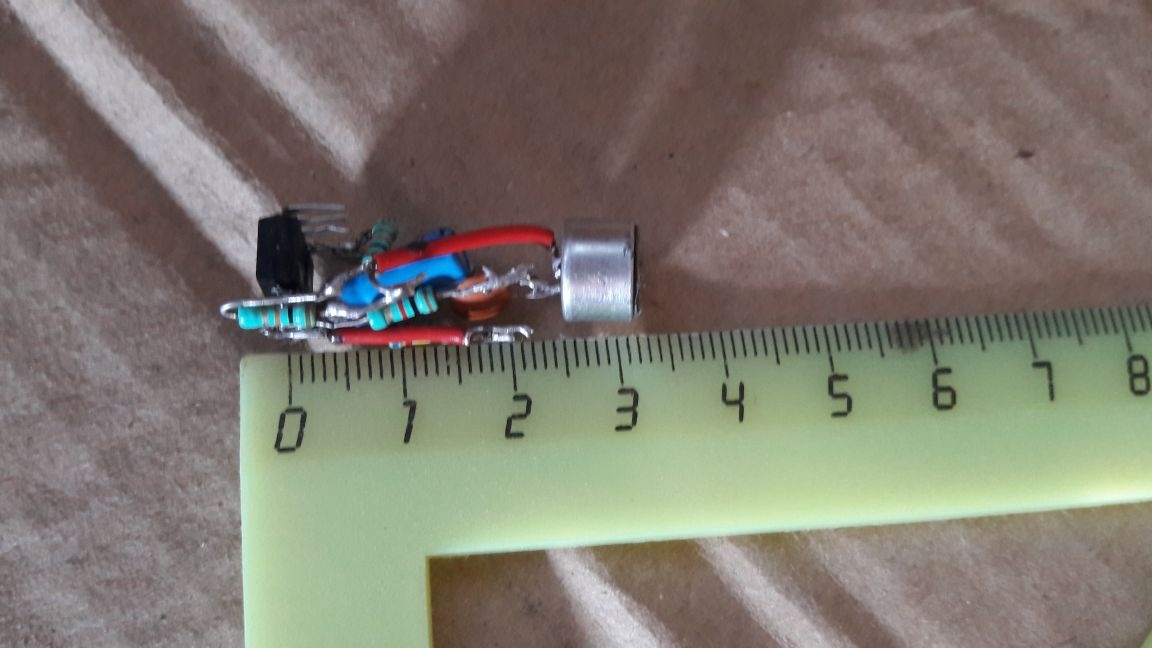
Församlingen slutförd.Jag installerade kretsen i ett hölje som jag gjorde av en liten plaströr.
Vi fortsätter med att testa enheten. Jag ansluter den till styrelsen Arduino UNO. Vi flyttar in i Arduino-utvecklingsmiljön och öppnar AnalogReadSerial-exemplet i avsnittet Grunder.
ogiltig installation () {
Serial.begin (9600); // anslut seriell anslutning på 9600 baud
}
void loop () {
int sensorValue = analogRead (A0); / * läs värdet från den analoga nollstiftet och spara det i variabeln sensorValue * /
Serial.println (sensorValue); // mata ut värdet till porten
fördröjning (1); // vänta ett millisekund för stabilisering
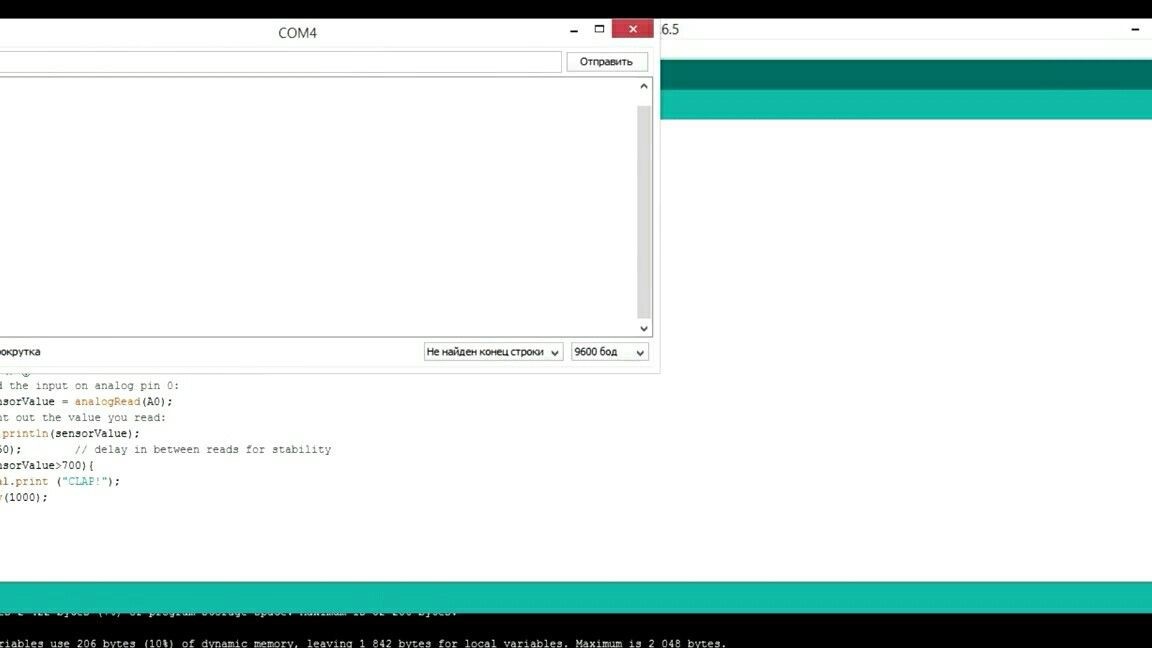
}Innan vi laddar in på kortet ändrar vi fördröjningen med 50 millisekunder och laddar den. Efter det gör vi en testbomull och följer indikationerna. Vid tidpunkten för klapp hoppar de, försöker komma ihåg detta värde ungefär och återgå till skissen.
Lägg till ett par rader i skissen.
if (sensorValue> X) {
Serial.print ("CLAP");
fördröjning (1000);
}I stället för "X", sätt in samma värde, ladda och klappa igen. Så fortsätt tills du hittar det optimala svarvärdet. Med ett överskattat värde uppfylls villkoret endast med bomull på mycket nära avstånd. Med ett lägre värde, kommer villkoret att vara uppfyllt vid minsta brus eller ljudet från steg.
Med rätt val av motståndet R5 kan denna sensor också förvandlas till en digital och kan användas i hårdvaruavbrott. Potentialen i denna design är enorm, på grundval av det kan du montera ett gäng olika projekt, och dess enkelhet gör enheten tillgänglig för alla.
Sammanfattningsvis föreslår jag att titta på en video där allt visas tydligt. Kalibreringsprocessen och montering av den enklaste bomullsomkopplaren förklaras också mer detaljerat.
Jag hoppas att du gillade det. Jag önskar er en lyckad församling!