Idag vill jag dela min nästa homebrew kvist. Det är baserat på Lego och Arduino. För kontroll kommer vi att använda en fjärrkontroll med en 433 MHz-sändare. Den här gången ville jag göra en tävling en bil. Låt oss börja:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- 433 MHz radiokommunikationsmodul
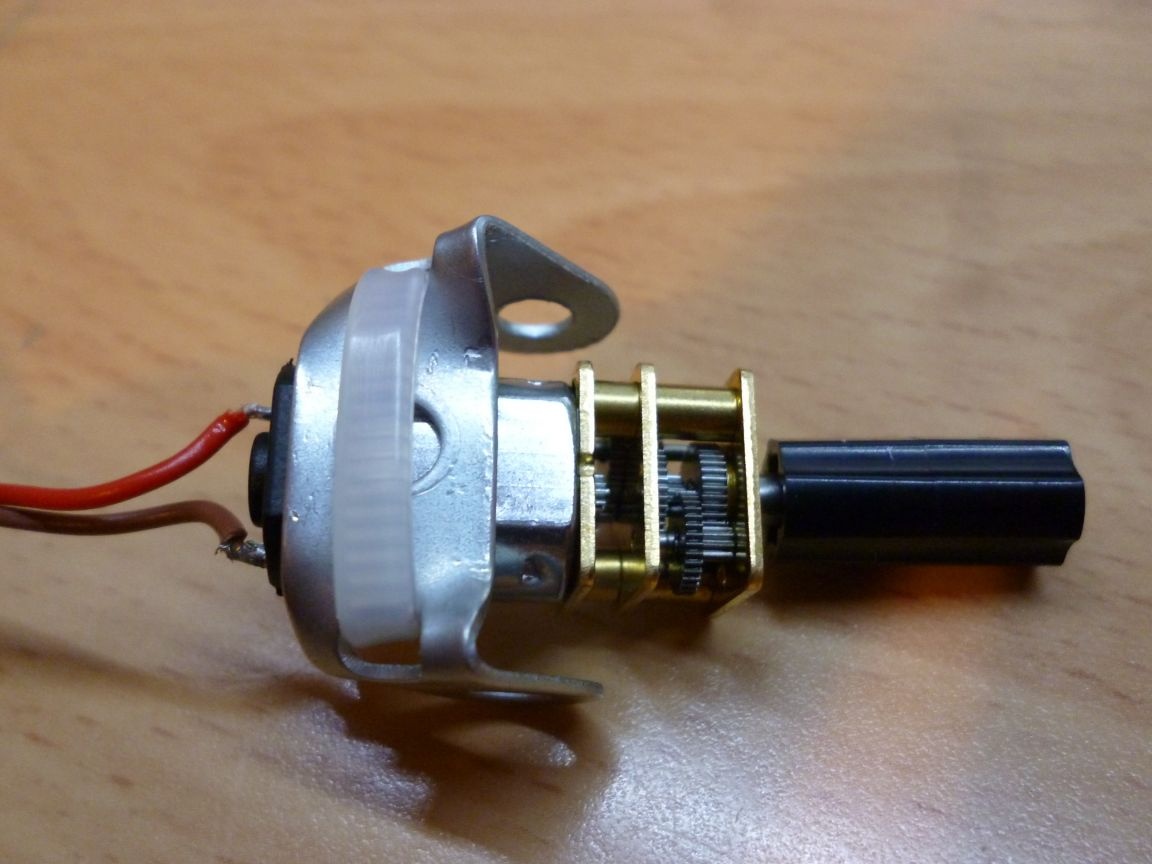
- Motordämpare 200 varv per minut med en axeldiameter på 3 mm
- 2 lysdioder
- 2 motstånd 150 ohm
- Kondensator 10v 1000uF
- 2 enkra radskammar PLS-40
- 2 PBS-20-kontakter
- Induktor 68mkGn
- 6 NI-Mn 1,2v 1000mA-batterier
- Anslutning pappa-mamma två stift till tråd
- Homutik
- Trådar i olika färger
- lödning
- Rosin
- lödkolv
- Bultar 3x40 och muttrar och brickor för dem
- Bultar 3x20
Steg 1 montera fallet.
Det är nödvändigt att montera vår maskin enligt Lego-instruktion 42022 det andra alternativet med viss förfining. Vi utför alla åtgärder från sidan 3 till 6. Vi behöver inte en växelmekanism. Lego-motorn behöver inte heller monteras. Men du behöver motorfästen samlade på sidorna 14-19, med undantag för växlar och axlar. Därefter samlar vi allt från sidorna 20 till 74, med undantag för spaken på sidan 25.
Steg 2 mekanisera kroppen.
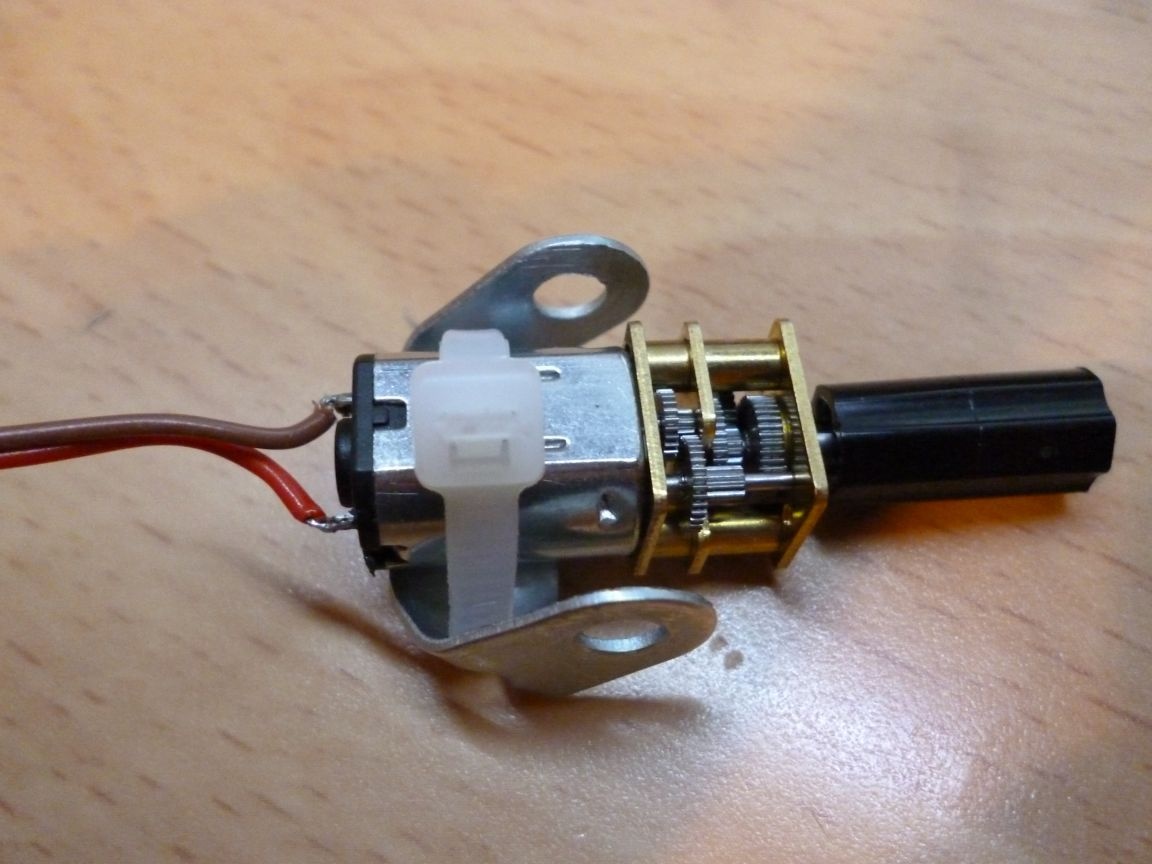
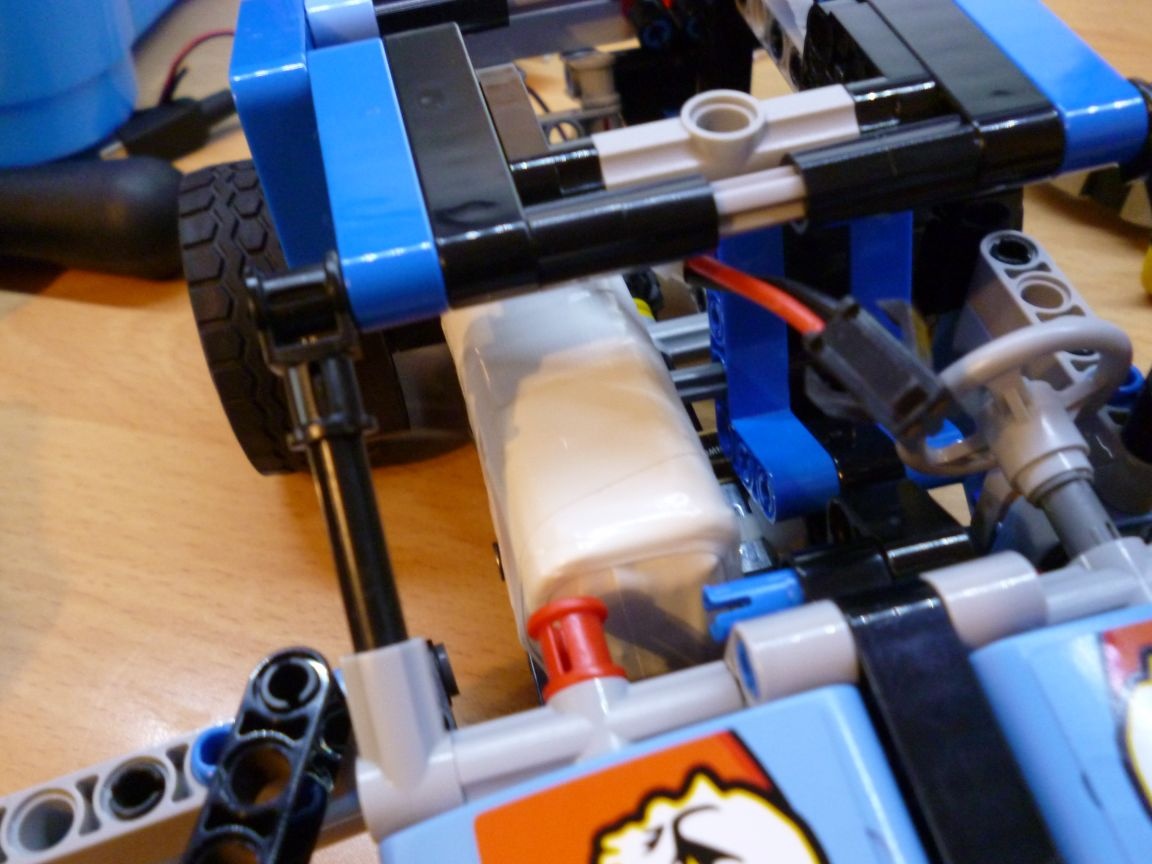
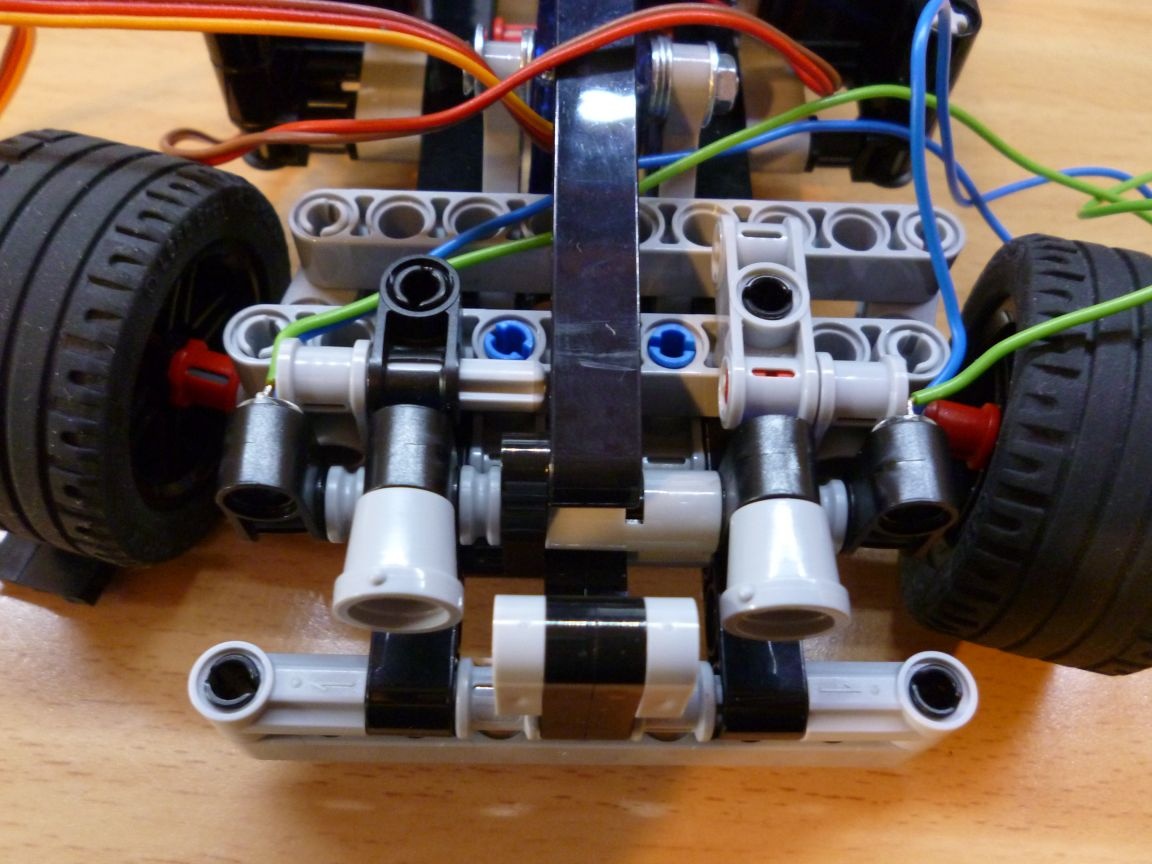
Sätt igång vår modellen det kommer att finnas en växelmotor med en hastighet på 200 varv / minut. Kan användas med ett annat växelläge. Men enligt min mening är detta det bästa alternativet. Vid 100 rpm - för långsamt, 300 rpm - det finns inte tillräckligt med kraft och motorn är mycket varm. Sätt på kopplingshylsan “Legovskaya” på växelmotorns axel och säkra den mot att vrida matchen med en trim. För att fixa vår motor på modellen är det nödvändigt att böja delen från metallkonstruktorn med bokstaven "P" och fästa växelmotorn på plattan med en klämma. Resultatet bör vara följande:
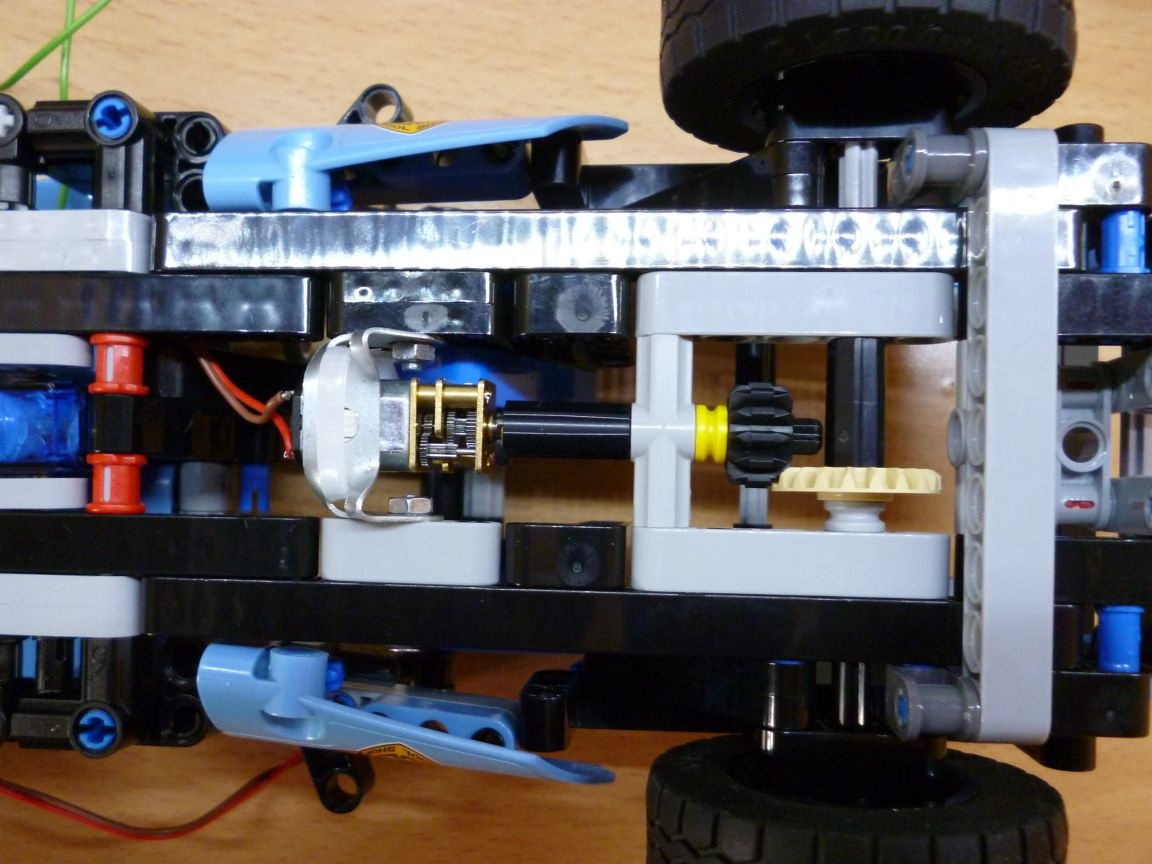
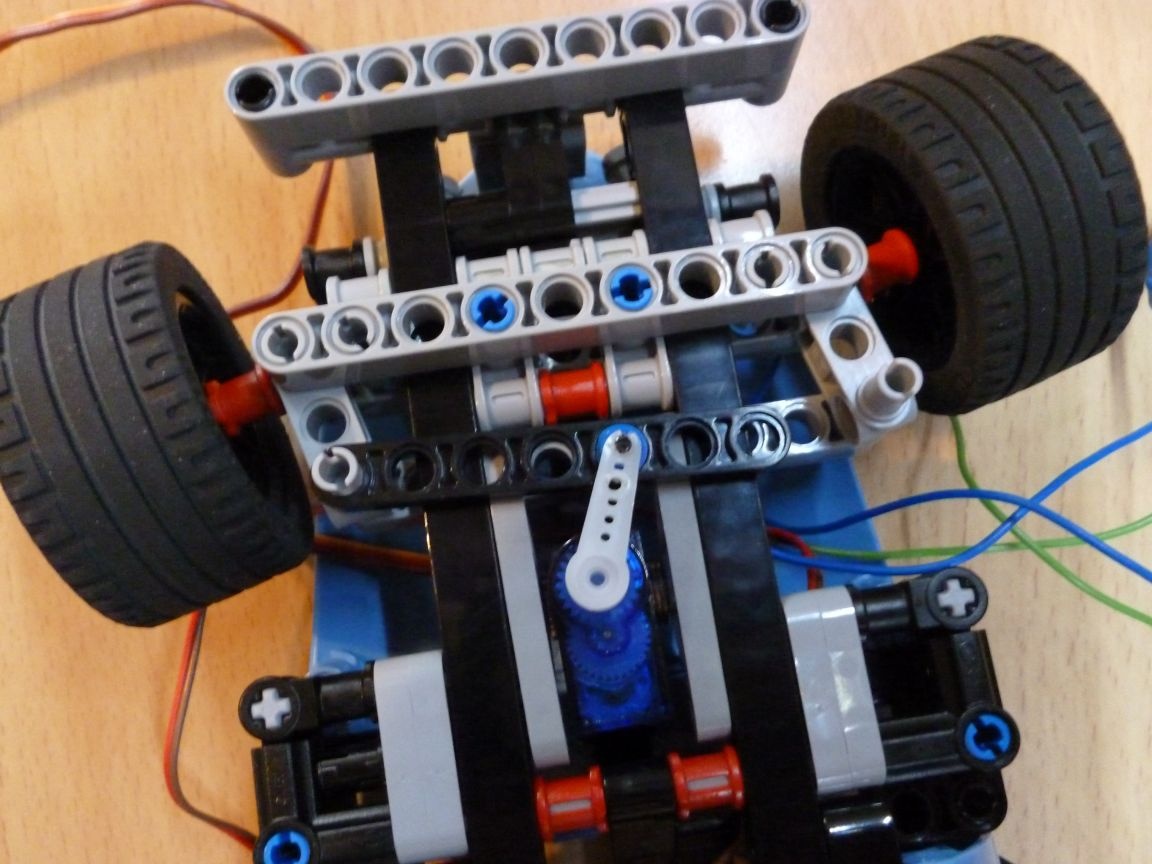
Med hjälp av 3x20 bultar fäster vi vår motor till modellen. Dra inte åt för mycket! Annars kan du skada Lego-konstruktordelar. På modellen ser det ut så här:
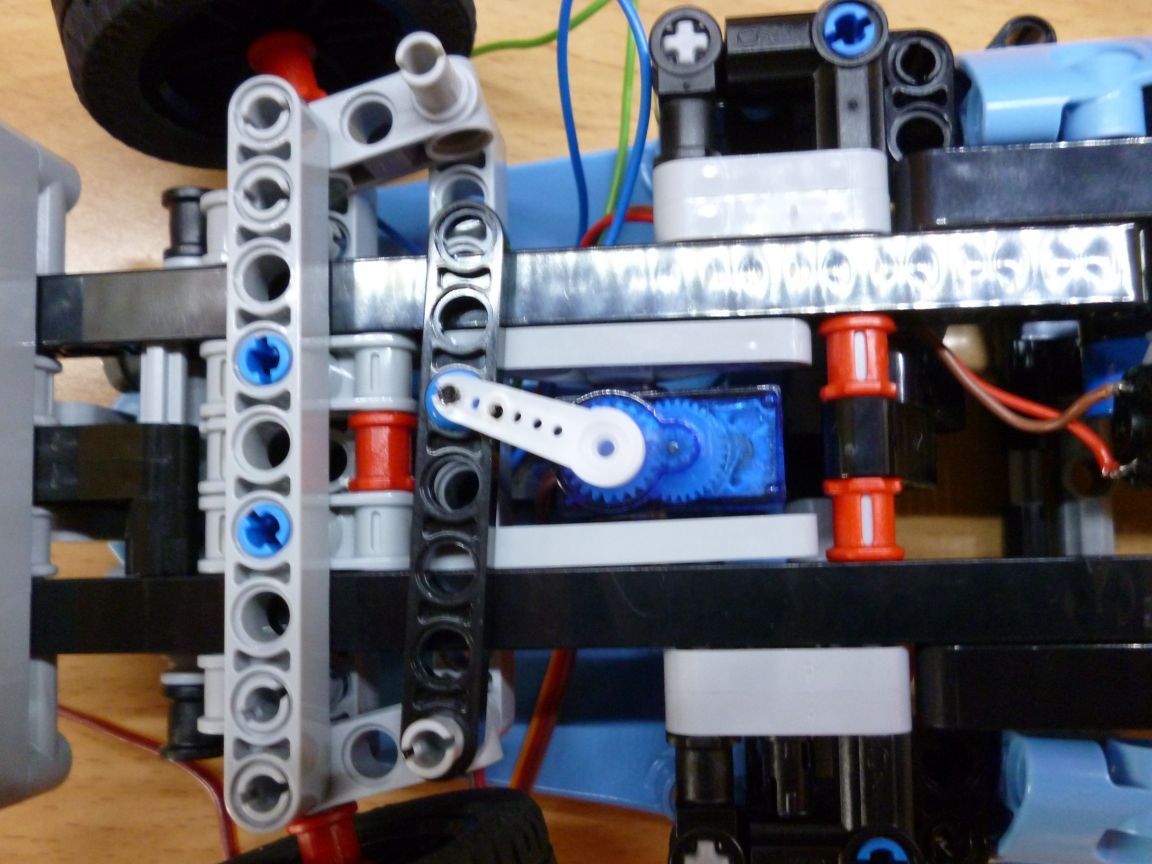
Ta en svagt modifierad servo SG-90 för att ta svängen. Fodralet måste borras noggrant för att inte röra vid de inre delarna, det genomgående hålet med en diameter på 3,2 mm eller helt enkelt klippas med en papperskniv.

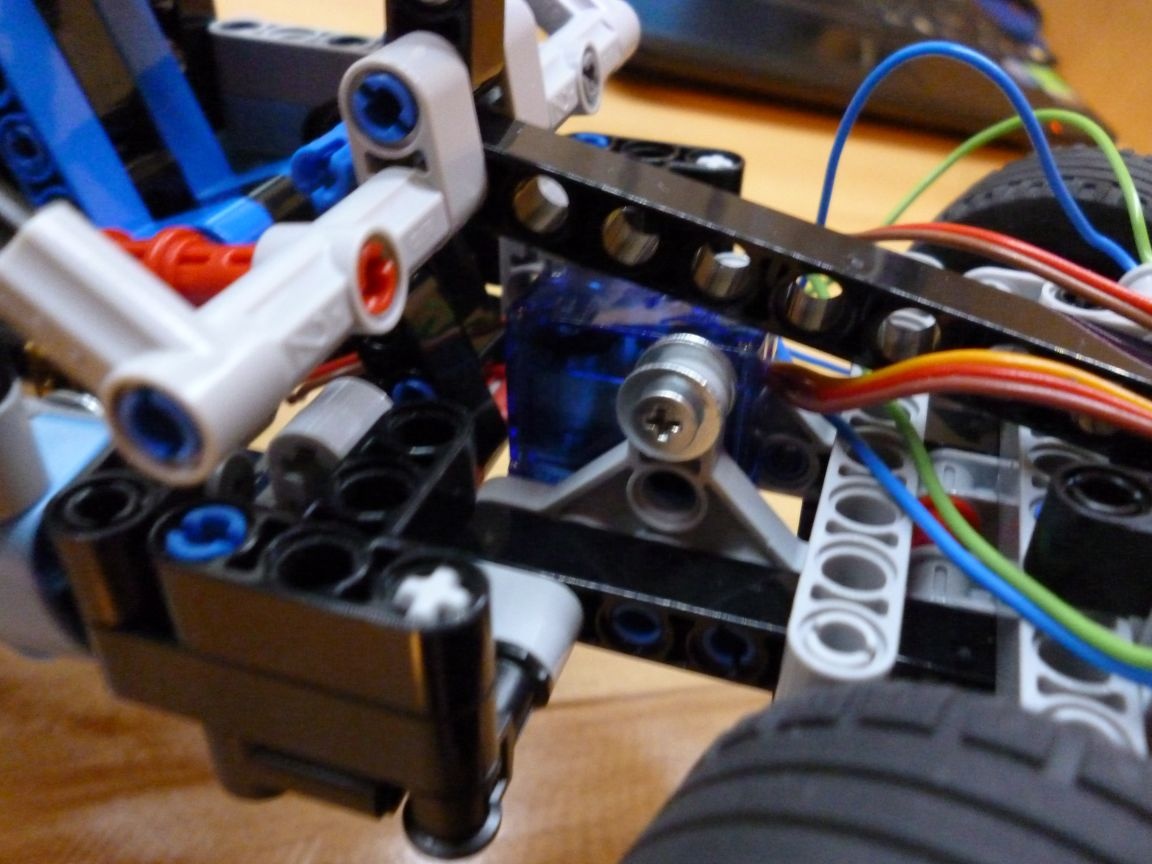
Vi sätter in en bult i det gjorda hålet och på kanterna sätter vi på triangulära plattor och fixerar med muttrar. Vi sätter spaken på servoaxeln och fäster delen på Lego-spaken. På en skrivmaskin ser det ut så här:
Steg 3 är en elektriker.
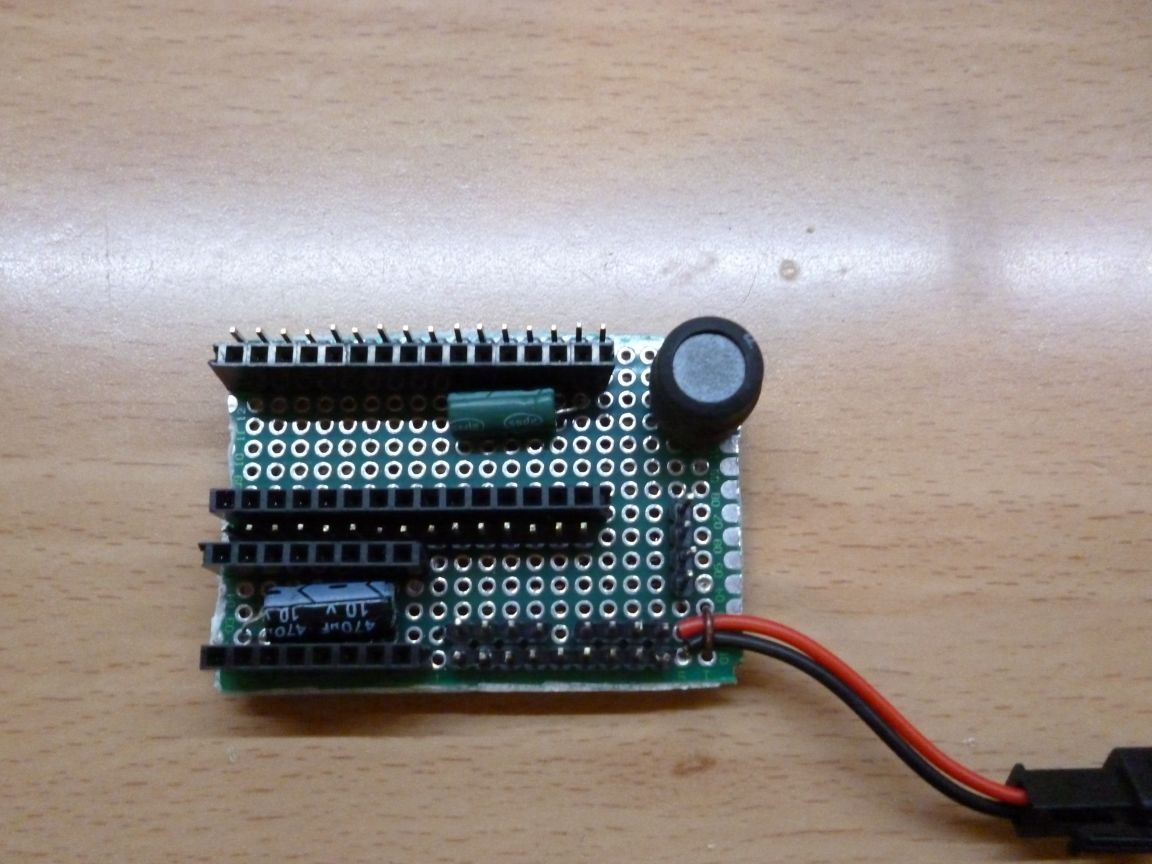
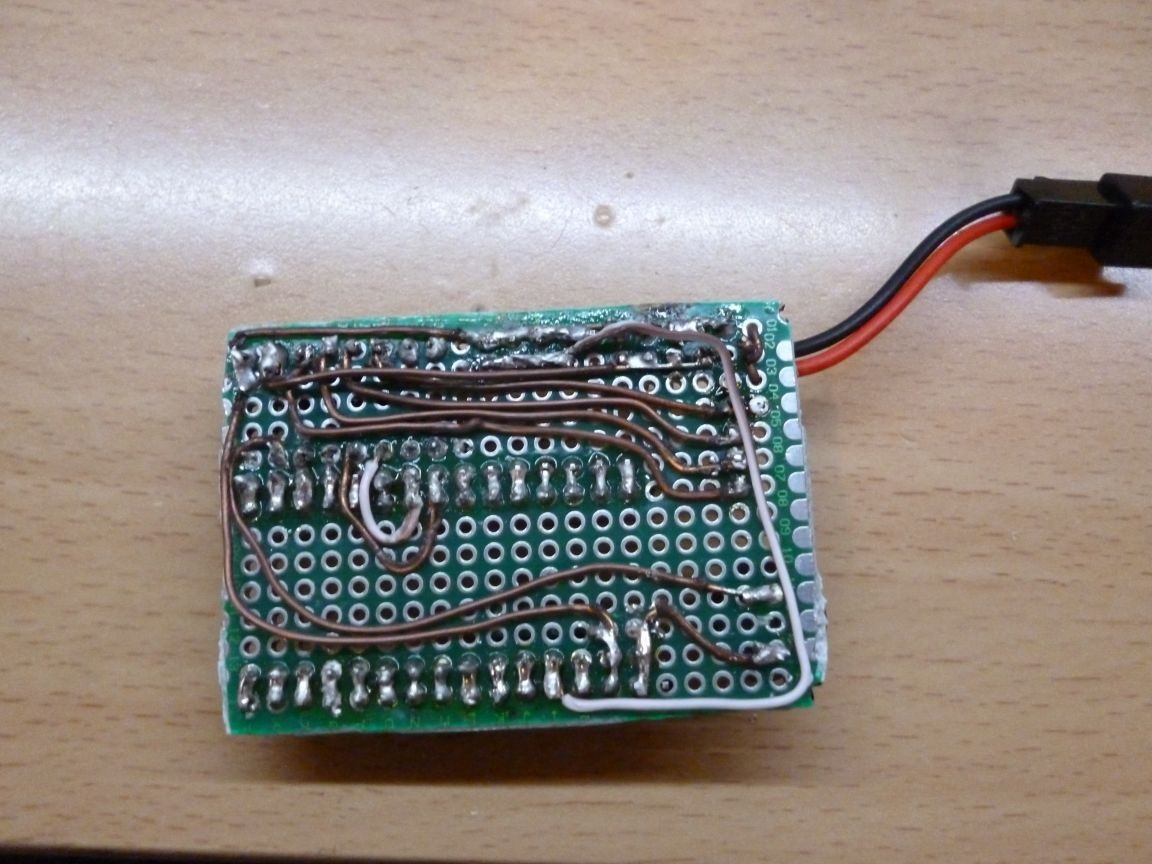
Lödkolv i handen och gå. All elektronik kan monteras helt enkelt genom att ansluta monteringsledningarna. Men detta är obekvämt, eftersom det kräver mycket utrymme. Dessutom finns det stor sannolikhet för kontakt av dålig kvalitet. Därför är det bättre att löda allt på kretskortet enligt följande schema:
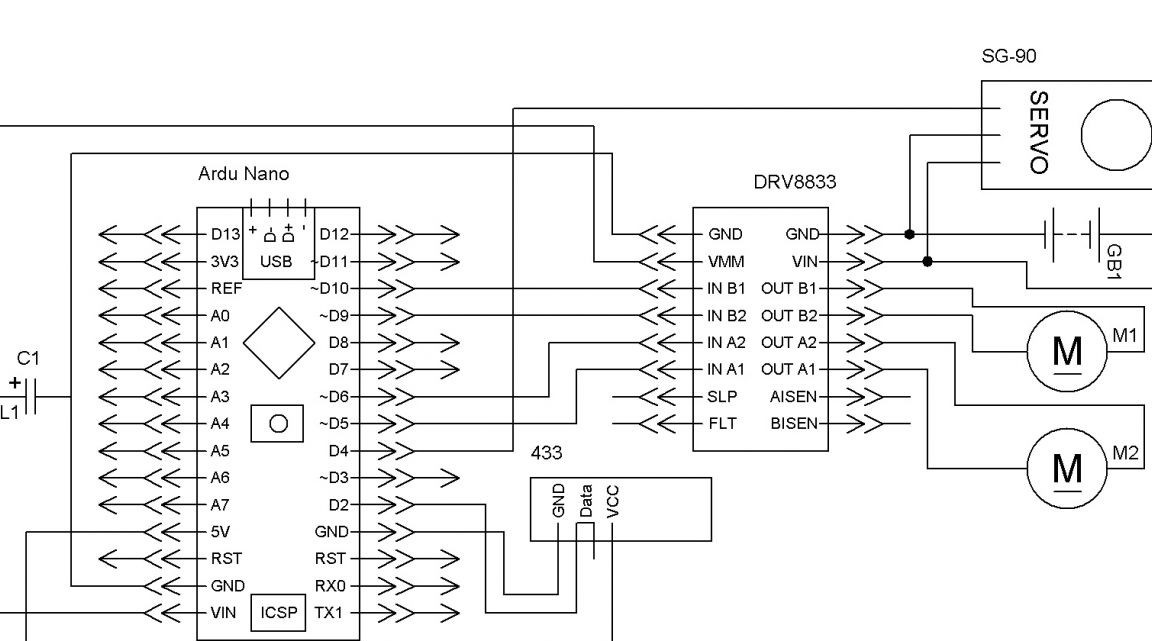
Jag får lite tydlighet: du kan ta valfri lågeffektkondensator, du kan också hitta en induktor av vilket slag som helst, detta är nödvändigt för att stabilisera spänningen på mikrokontrollern. Antennen måste lödas till mottagaren. Jag fick följande:
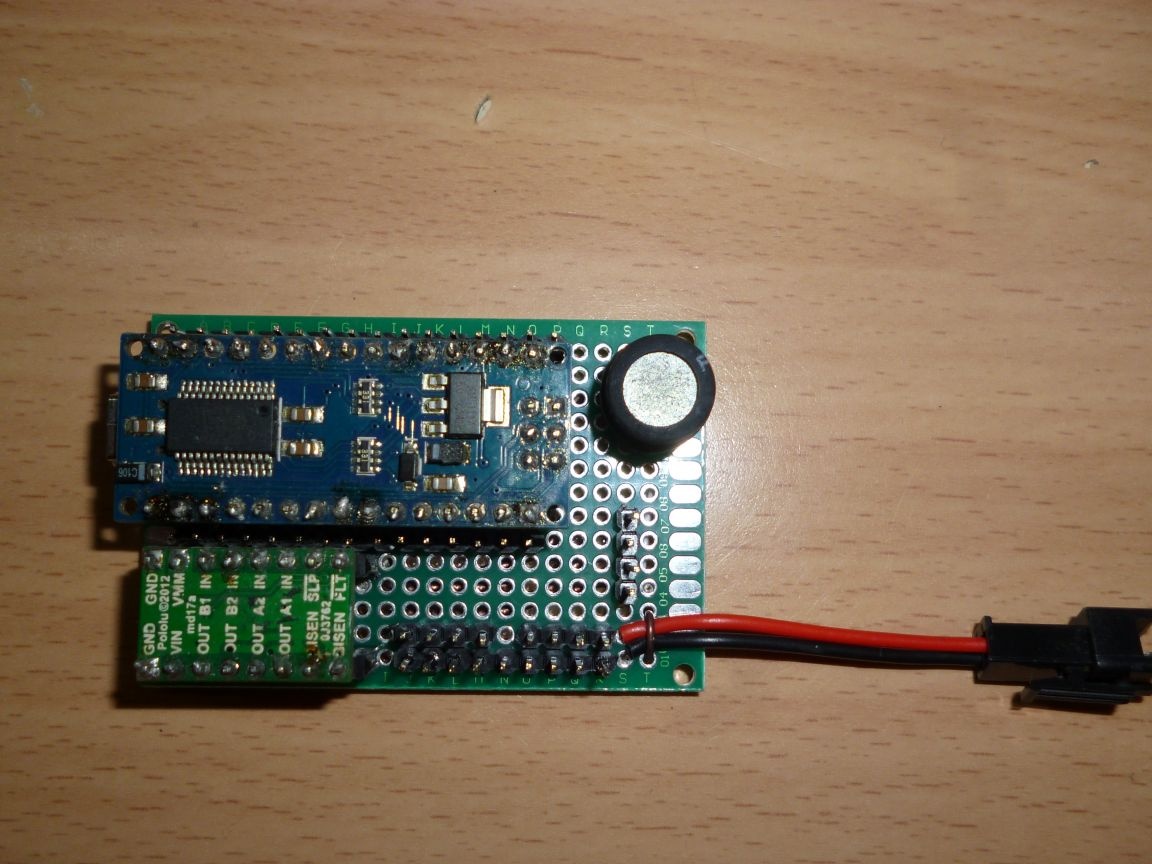
Vi placerar Arduino Nano och DRV 8833 på deras platser:
För ström kommer vi att använda 6 Ni-Mn 1.2v 1000mA-batterier, lödda i serie och lindade med elektrisk tejp. Limma dem på en dubbelsidig självhäftande tejp.

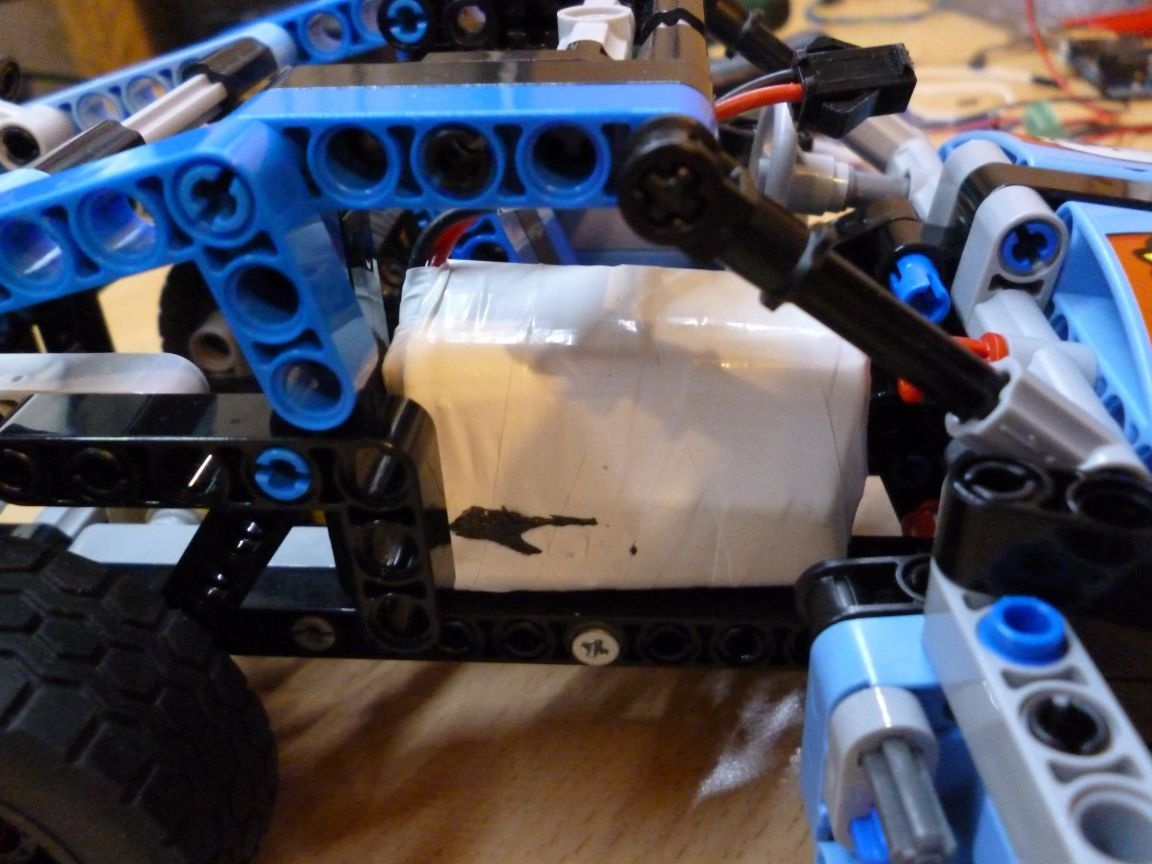
Vi ansluter allt enligt schemat och installerar på baksidan av maskinen. Du kan också lägga till ett par lysdioder. Sätt dem i strålkastarna och anslut till stift 14 (A2).
Steg 4 firmware.
För att skriva firmware, använde jag Arduino IDE. Den aktuella versionen i skrivande stund är 1.8.1. Det är bekvämt att implementera kommunikationsprotokollet med hjälp av 433 MHz-modulen med rc-switch-2.52-biblioteket. Du måste ladda ner den och lägga till den i bibliotekmappen på Arduino IDE.
Vi ansluter Arduino och flashar den med följande firmware:
För att testa vår modell, behöver vi ett andra Arduino-kort. Det är nödvändigt att ansluta en 433 MHz radiosändare till det andra kortet. Sändaren är ansluten enligt följande:
VCC (sändare) till 5+ (Arduino),
GND till GND,
DATA till D10.
Skriv den modifierade SendDemo-skissen där. Det finns i exemplen i biblioteket som vi installerade och tjänar till att skicka kommandon. Innan du blinkar skissen måste du ändra den något, nämligen att ändra de överförda kommandona. Beroende på vad du behöver kontrollera, skriv följande kommandon till sändningsraden:
"1" - rörelse framåt (skriv ett kommando utan citat!)
"2" - bakåtrörelse
“15” - full stopp
"3" - vrid ratten åt vänster
"4" - vrid ratten åt höger
"5" - ställ ratten i mitten
"10" - slå på strålkastarna
"11" - stäng av strålkastarna
Att göra en fjärrkontroll med en 433 MHz radiosändare är ett ämne för en separat artikel. Jag kommer definitivt att skriva instruktionerna för tillverkning av en sådan fjärrkontroll.
Jag vill säga att det här alternativet är lämpligt för nästan alla modeller av Lego-bilar. Det räcker med att ansluta all mekanik och hitta en plats för brädet. Och om du inkluderar fantasi kan du mekanisera vilken modell som helst.