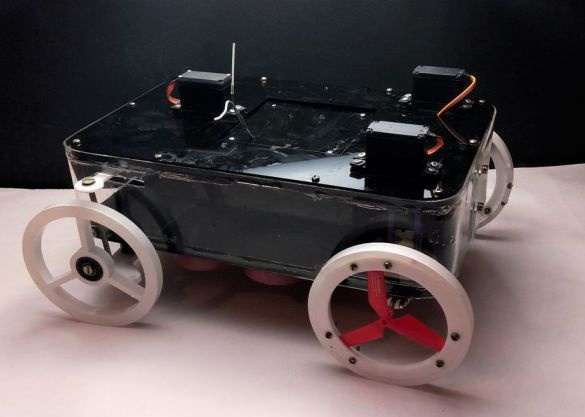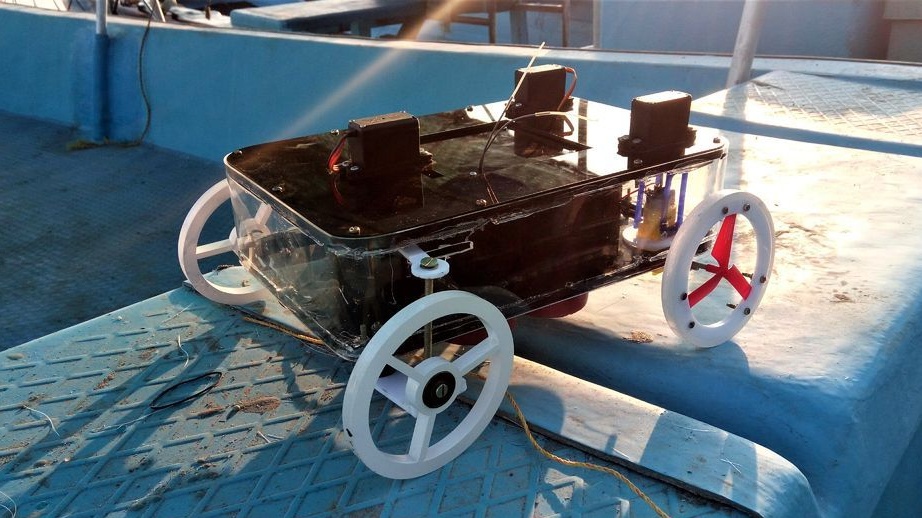



I den här artikeln kommer vi att överväga tillverkning av indiska hantverkare av ett terrängfordon som rör sig både på land och på vatten. All terrängfordon består av en flytande plattform med hjul och en propell. Mekanismer styrs av fjärrkontroll via Arduino UNO.
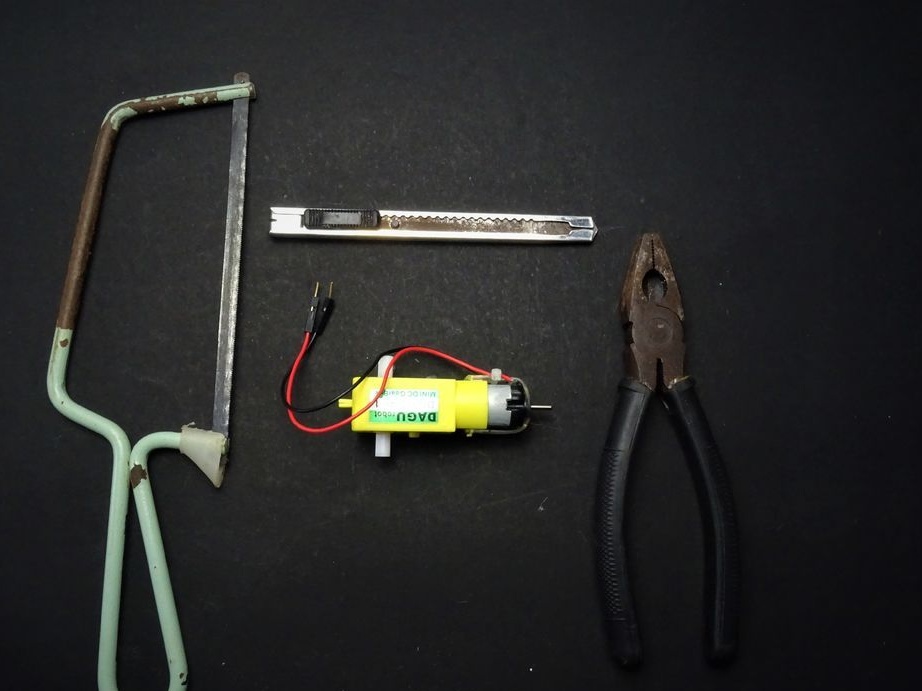
Verktyg och material:
-
-AKB 9V;
-Vyklyuchatel;
-Akril;
-Fanera;
(som referens är lagret 8 x 16 x 5 mm, författaren indikerar 8 * 22 mm)
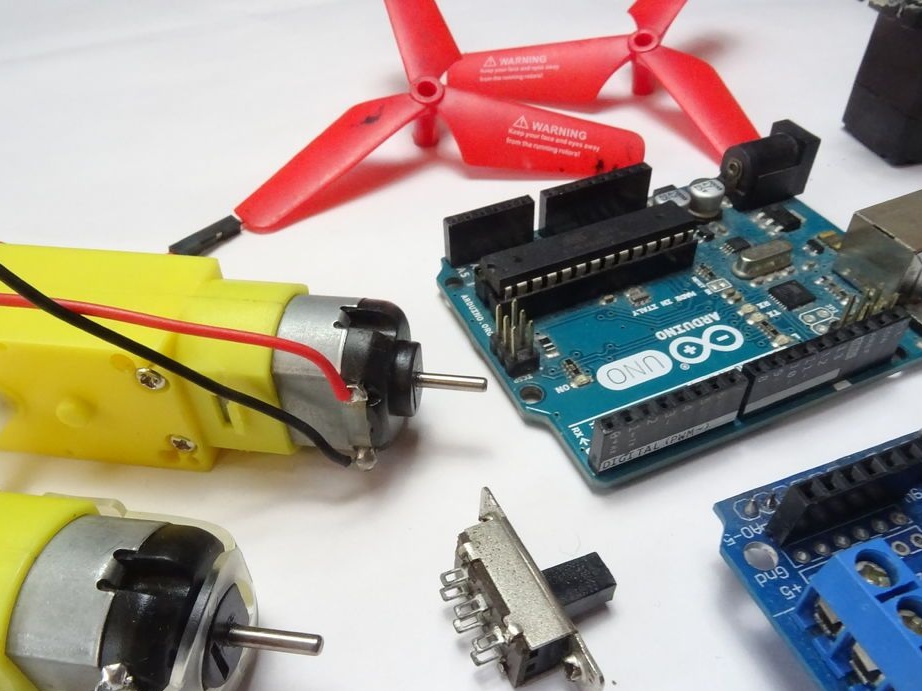
-Två propeller;
-Krepezh;
-Poplavki;
-Pistolen;
-Super lim;
Epoxiharts;
-Lödjärn;
-Drel;
-Laser skärare;
-Pila;
- skruvmejsel;
-Drel;
-Lödjärn;
A-boards;
-Dator med mjukvara;


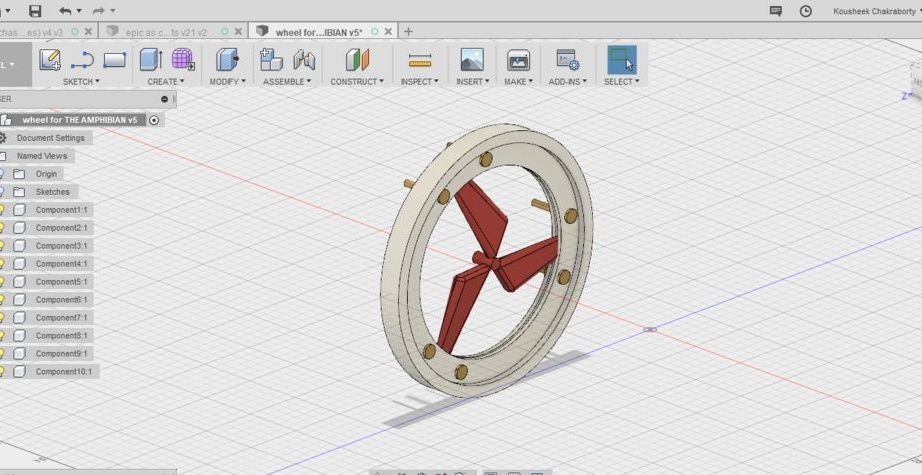
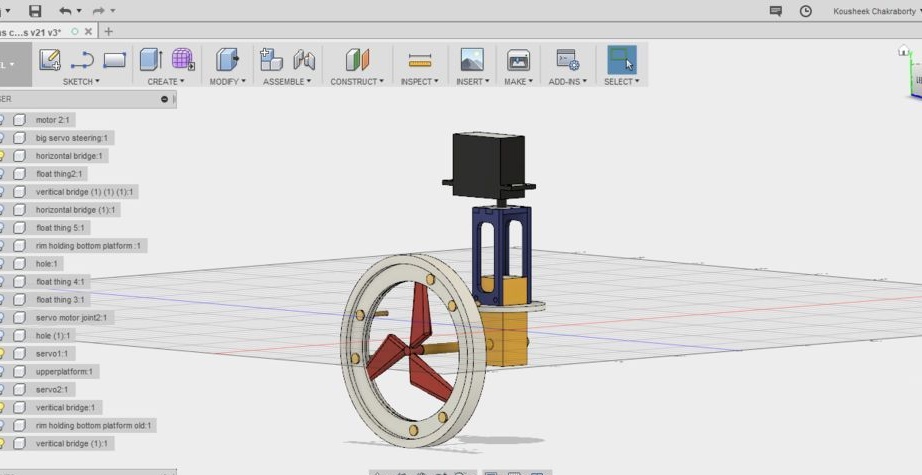
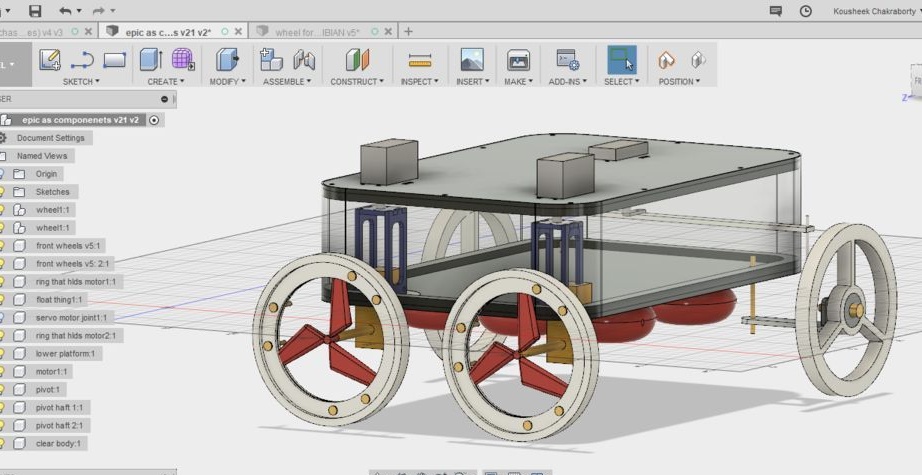
Steg ett: Design
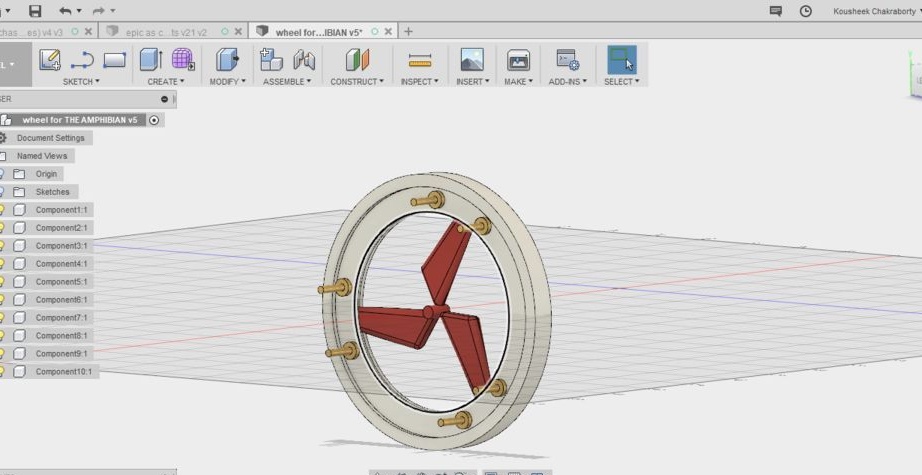
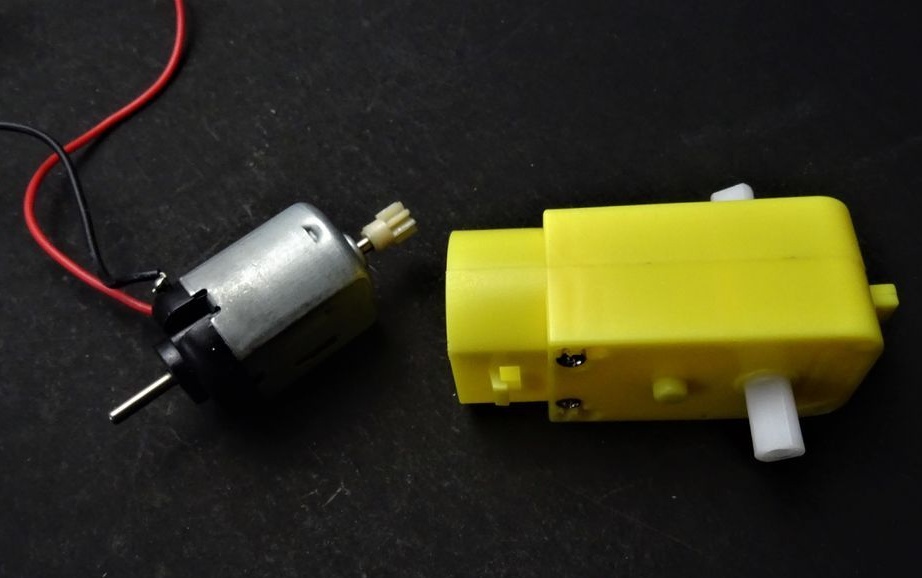
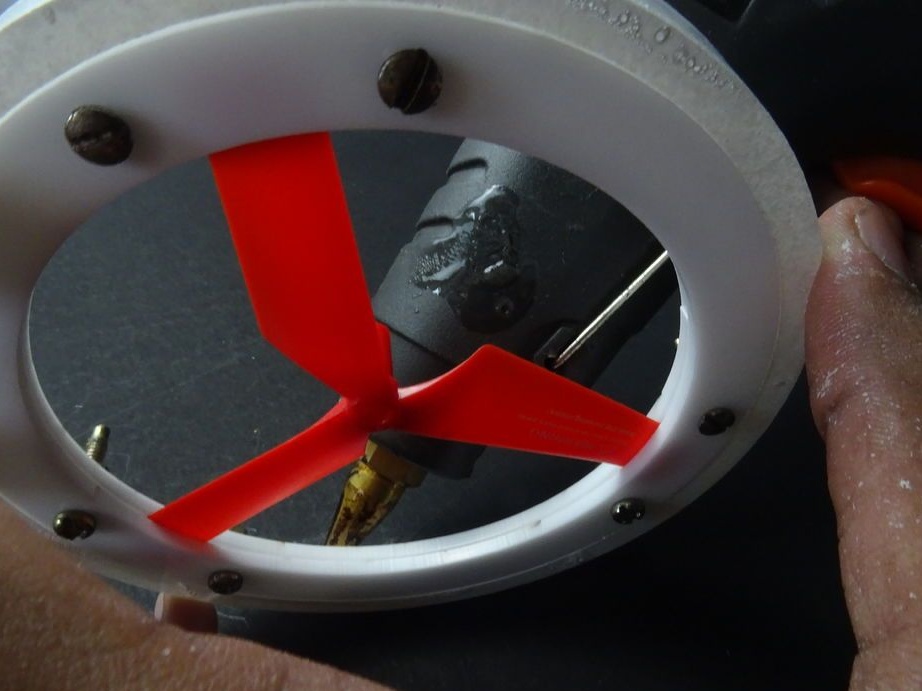
För att skapa projektet använde mästarna programmet Fusion 360. Hela svårigheten var att kombinera rörelse på land och i vatten. Vid utformningen av hjulen utvecklade mästarna ett system där skruvarna skulle öppna i vattnet, men med tanke på designens komplexitet integrerade de helt enkelt propellerna från barnens leksak inuti hjulet. Detta gör att hjulen kan flytta terrängfordonet på land, och när de kommer in i vattnet slås skruvarna på.
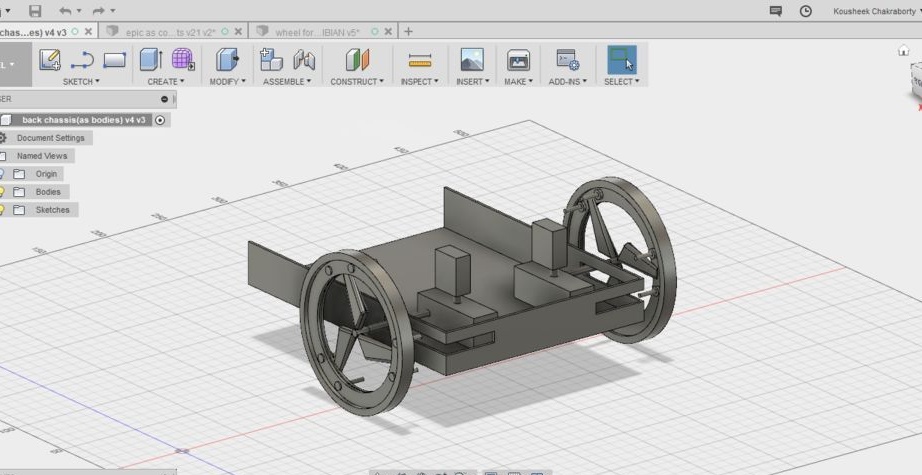
För att genomföra denna idé måste du kunna rotera bakhjulen vinkelrätt mot terrängfordonet när du kör på vatten. Detta blev möjligt när motorväxlar togs ut ur ramen. Plastväxellådor och vatten som kommer in i dem kommer inte att skada.
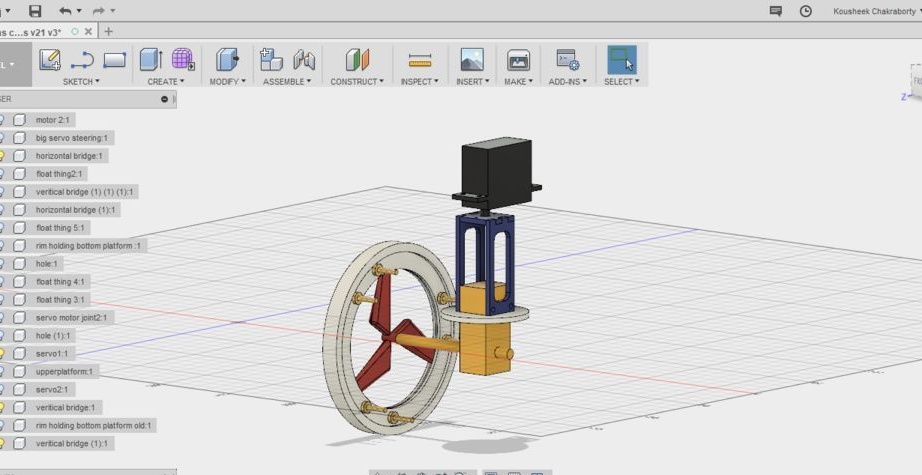
Roteringen av hjulskruvarna kommer att utföras med en servodrift.
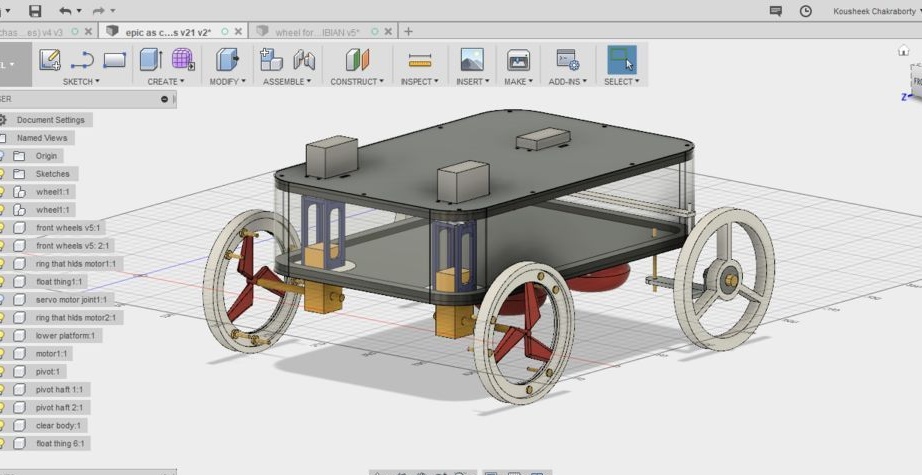
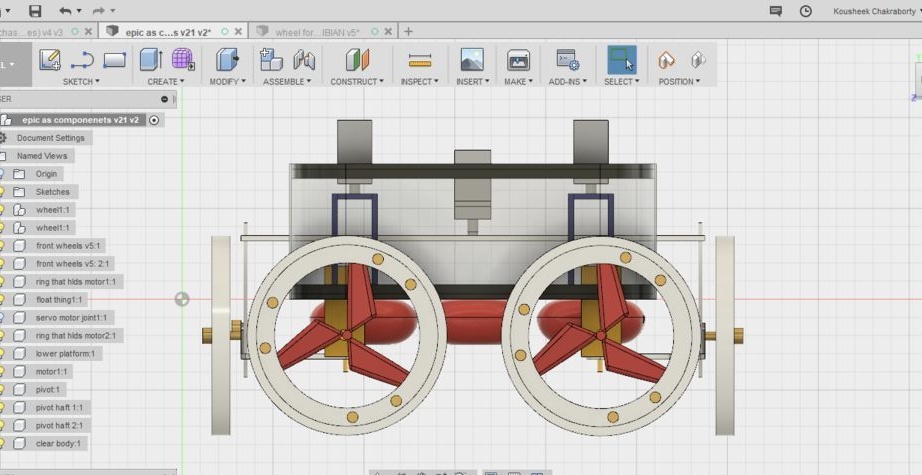
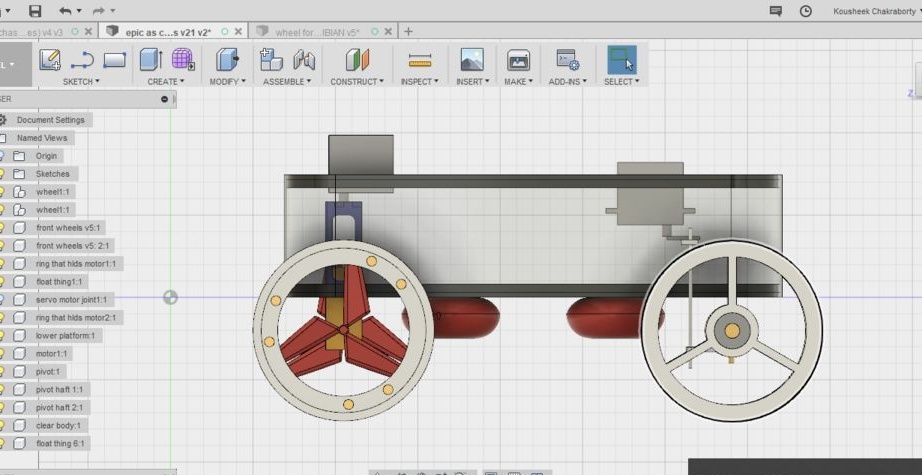
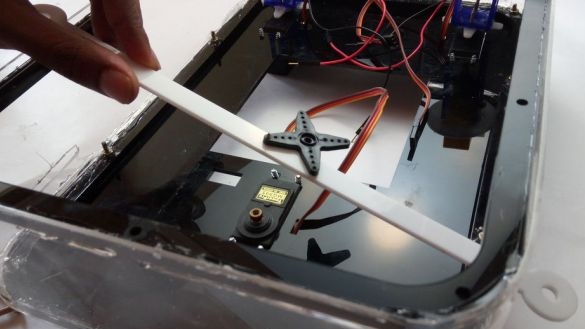
Terrängfordonet har två svängmekanismer. Den ena för att styra bakhjulen på propellerna i vattnet, och den andra, för att köra på land, styr framhjulen. Framhjulens rotationsvinkel är 35 grader, vilket gör att du kan göra vassa svängar.
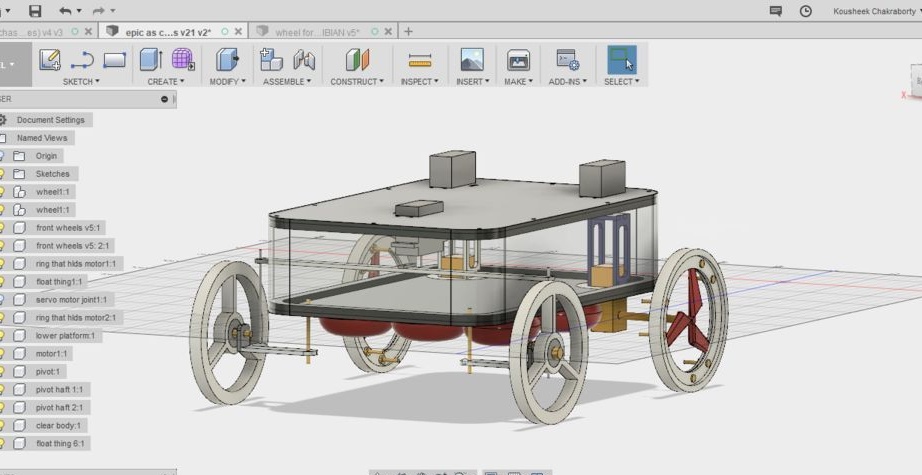
På bilderna nedan kan du se transformeringen av terrängfordonet när du rör dig genom land och vatten.
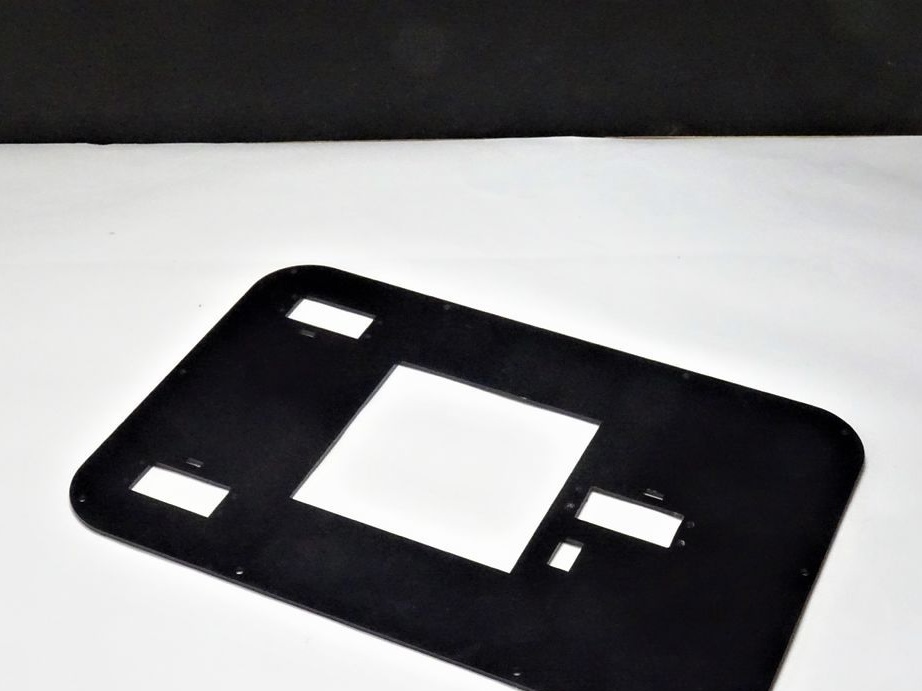
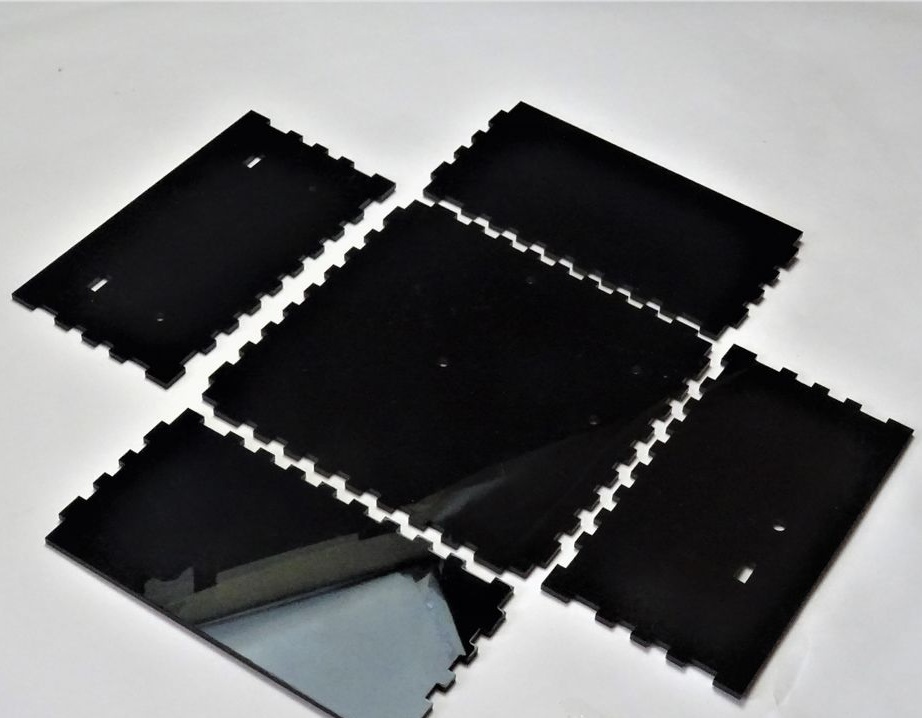
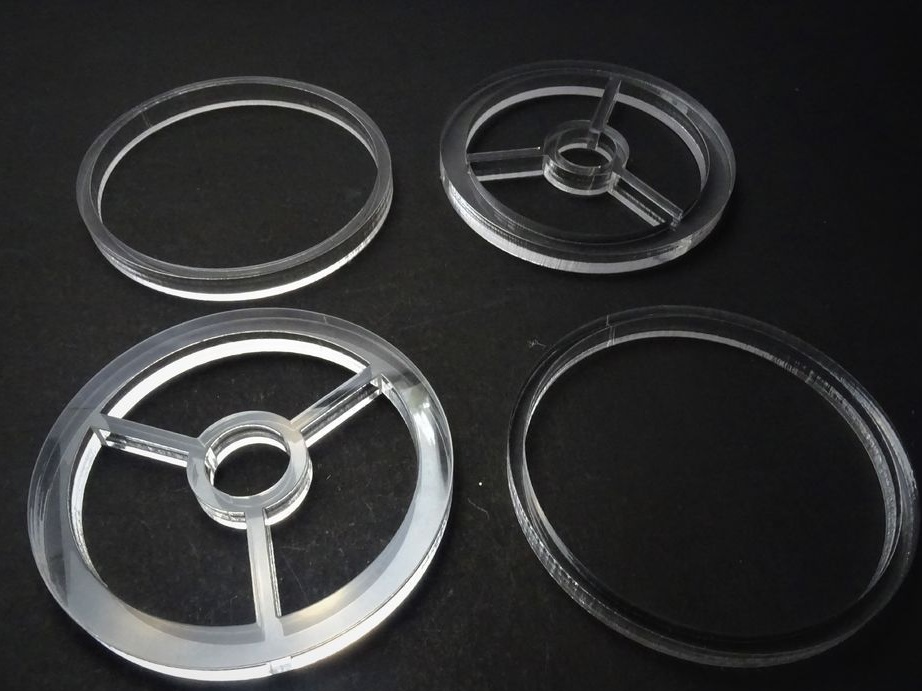
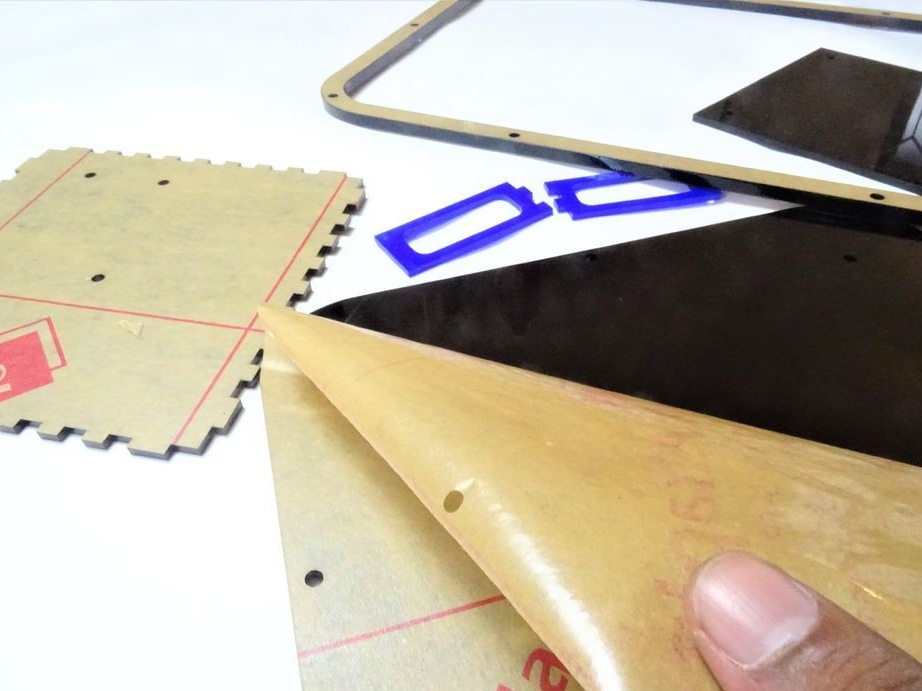
Steg två: Laserskärning
För terrängfordonet använde befälhavaren akryl med olika tjocklek och färg.
Svart topprock 3 mm x 1
Bottenlager Svart 3 mm x 1
Svart sidoram 5 mm x 2
Sidovägg transparent 2 mm x 1
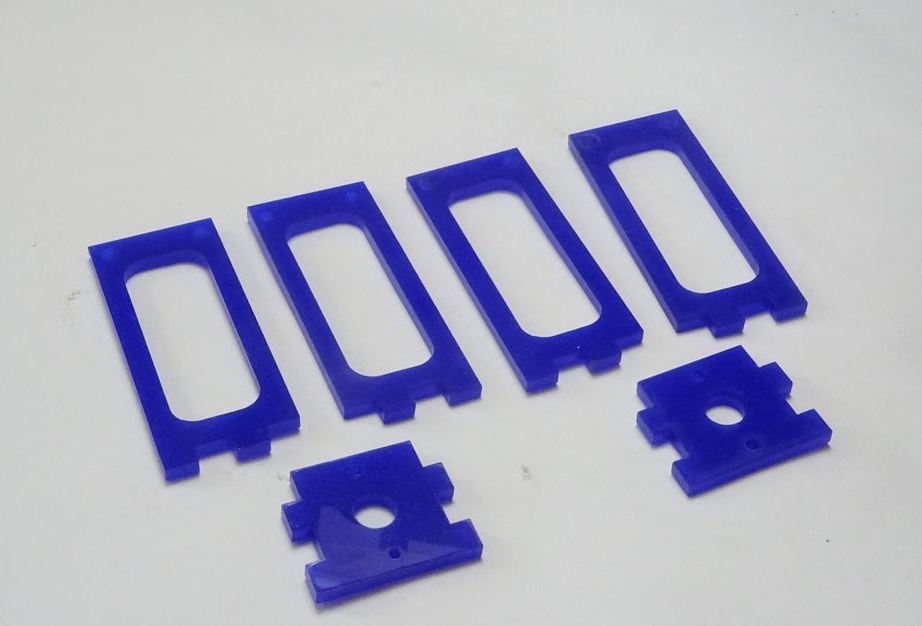
Kraft sidblått 3 mm x 4
Bridge Top Piece Blue 3 mm x 2
Motor DisK Vit 3 mm x 2
Framhjulet vit 10 mm x 2
Inre fälg (bakhjul) Vit 3 mm x 4
Yttre fälg (bakhjul) Vit 10 mm x 2
Styrväv 3 mm x 1
Lådeskåp Svart 3 mm x 1
Svart fackskydd 3 mm x 1
Bakre motoraxel Vit 3 mm x 2
Frontpanelen vit 5 mm x 2



Du kan ladda ner filen för CNC från länken.
Laserskärning Rover Parts.zip
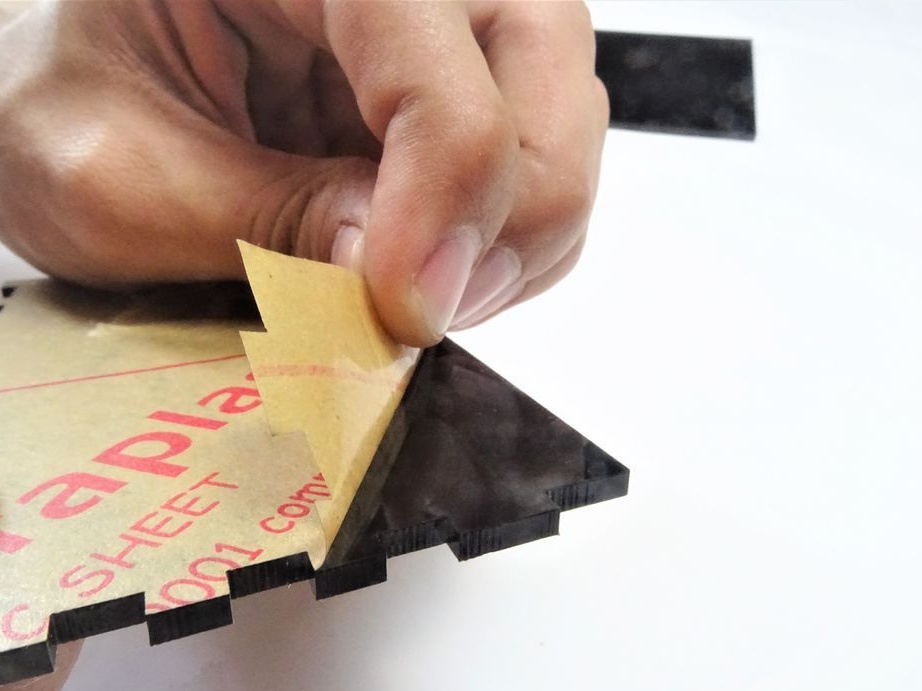
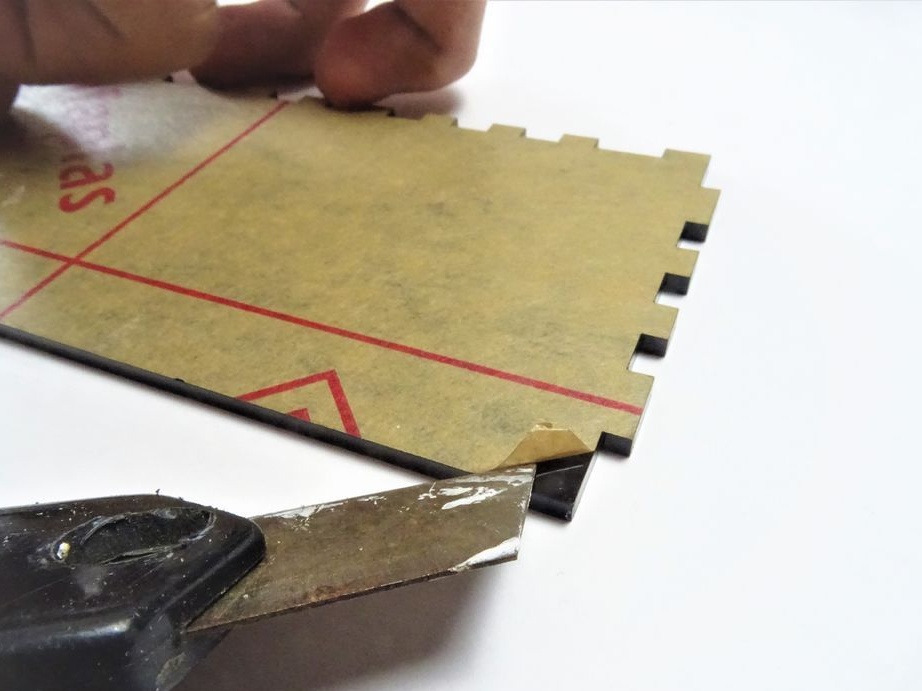
Ta bort skyddsskiktet från dem efter tillverkning av delarna.
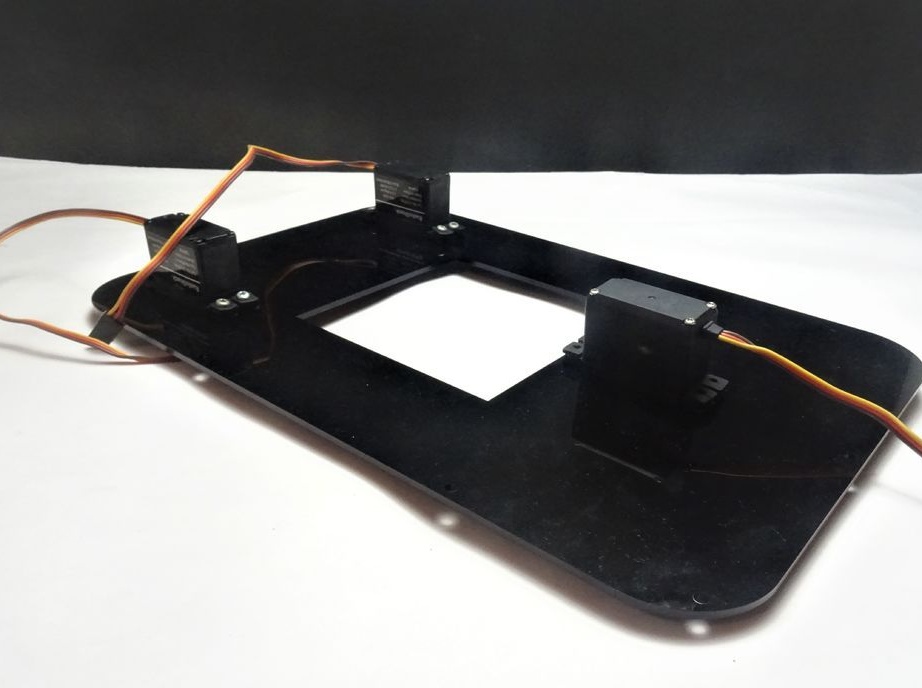
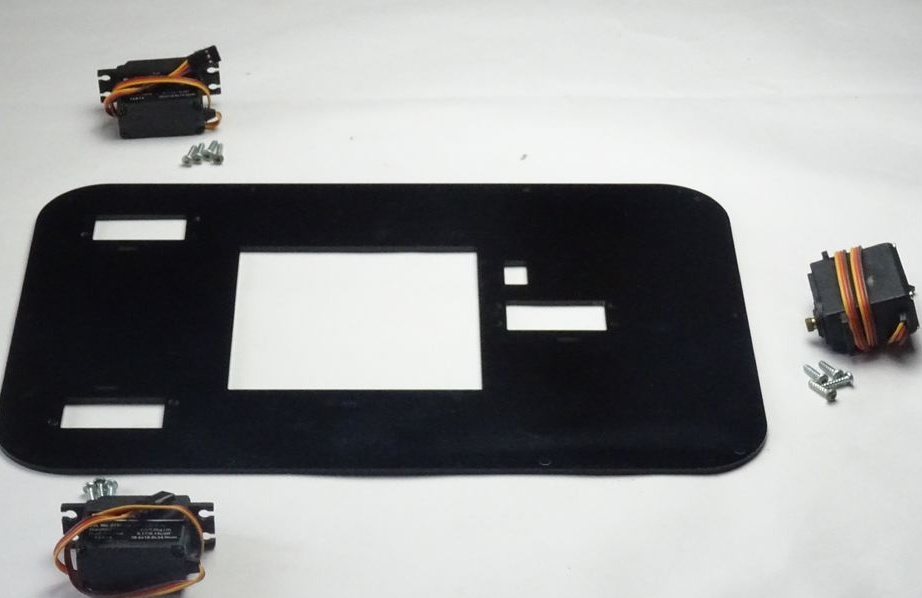
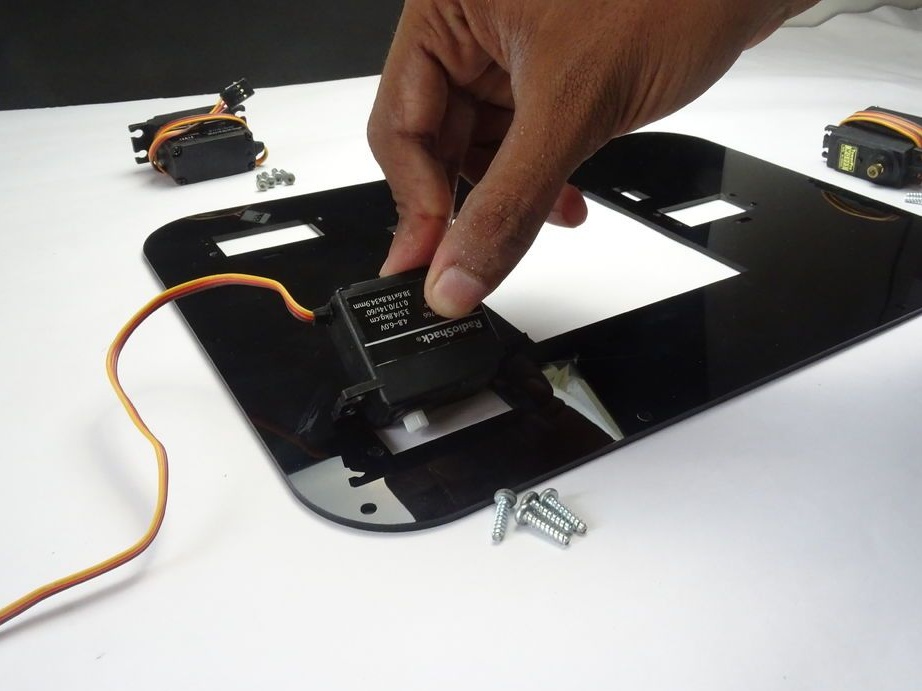
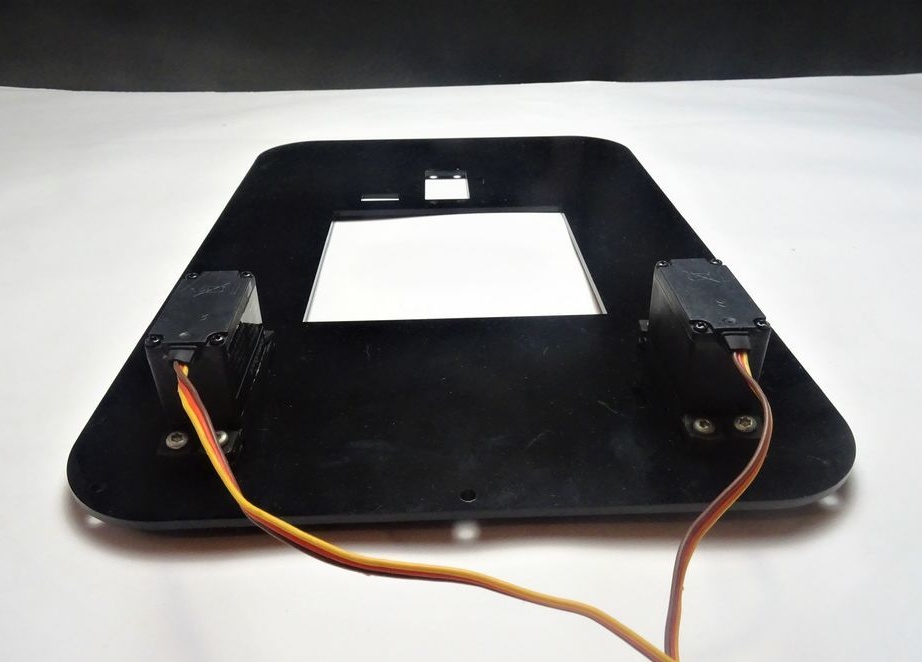
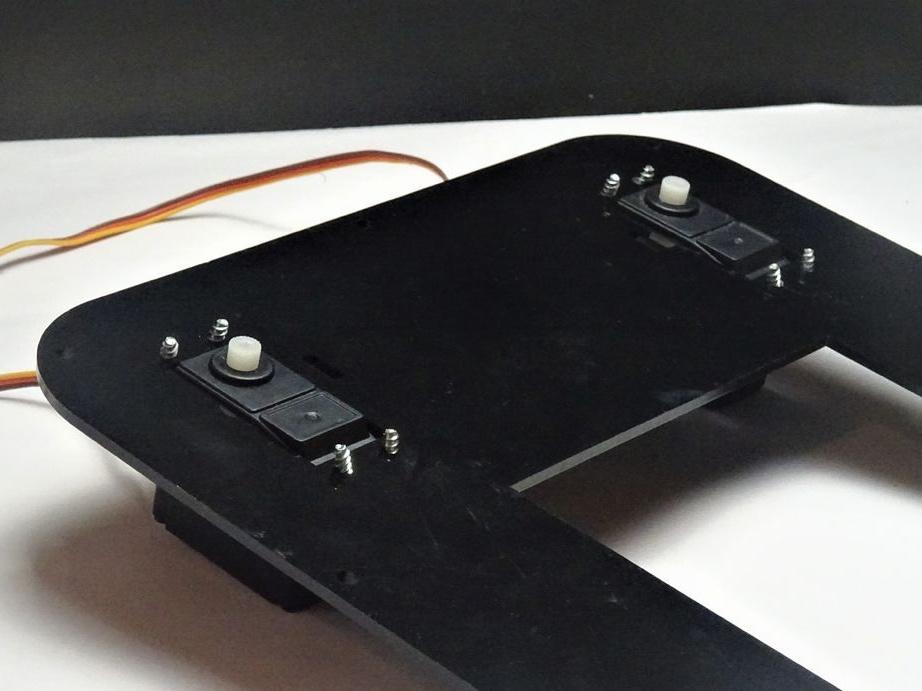
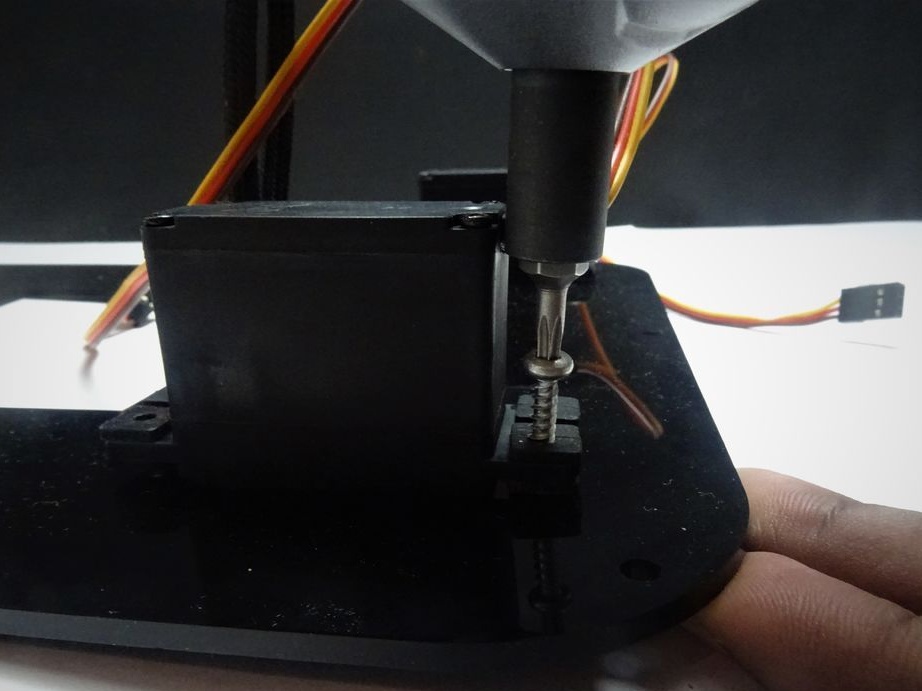
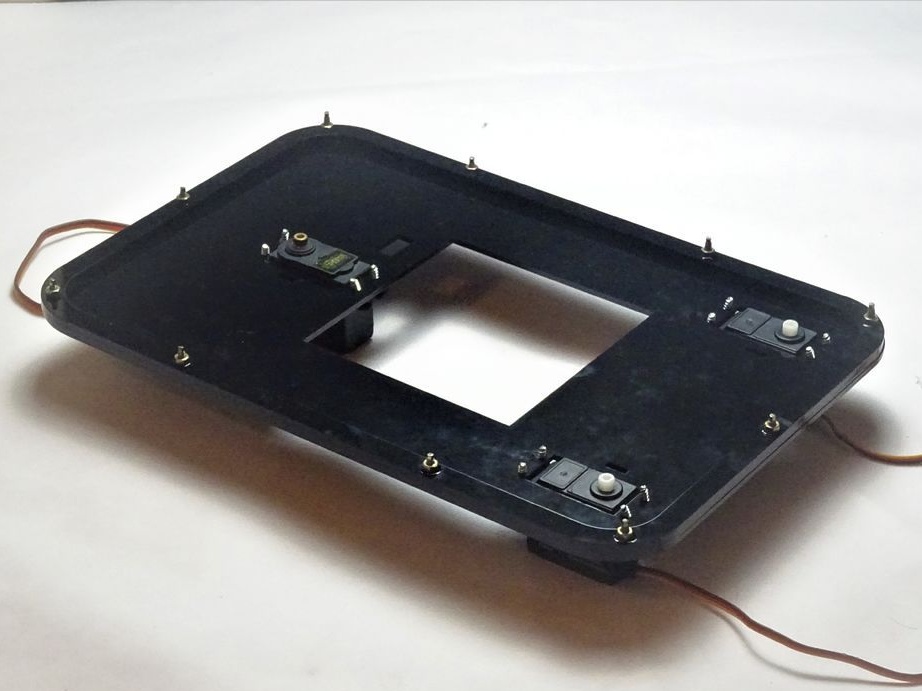
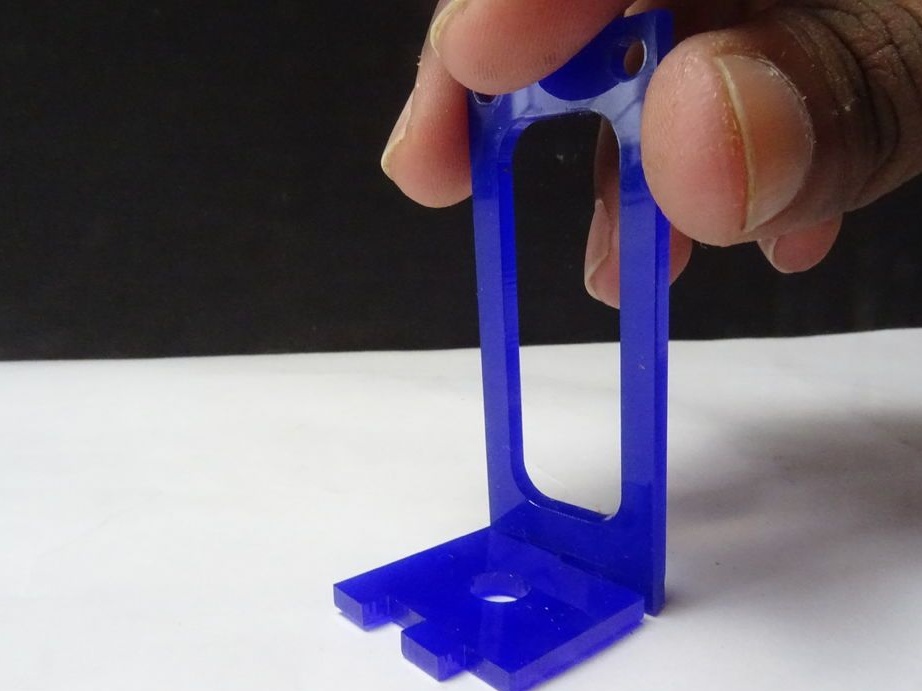
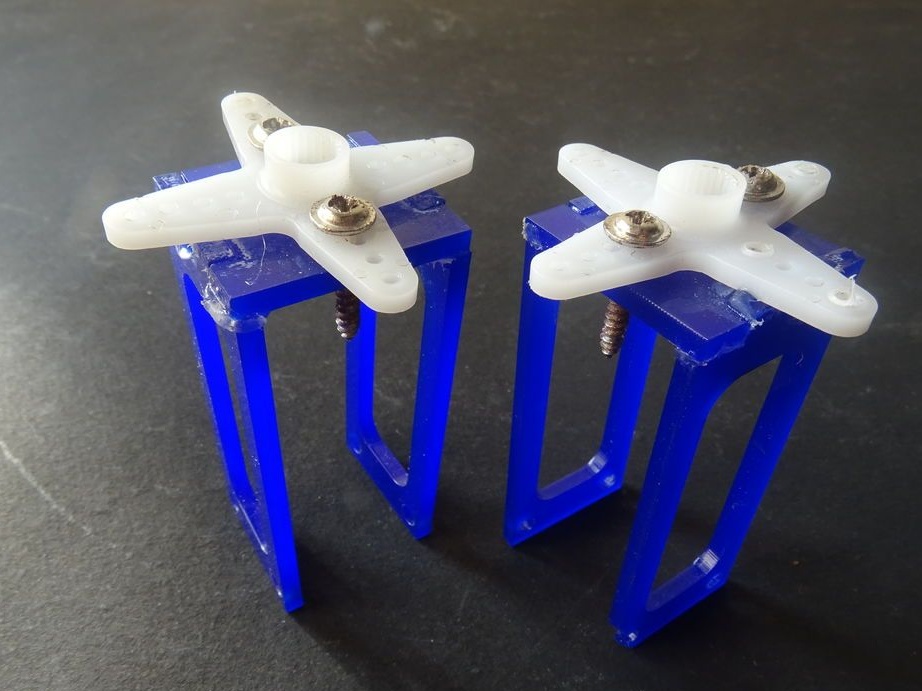
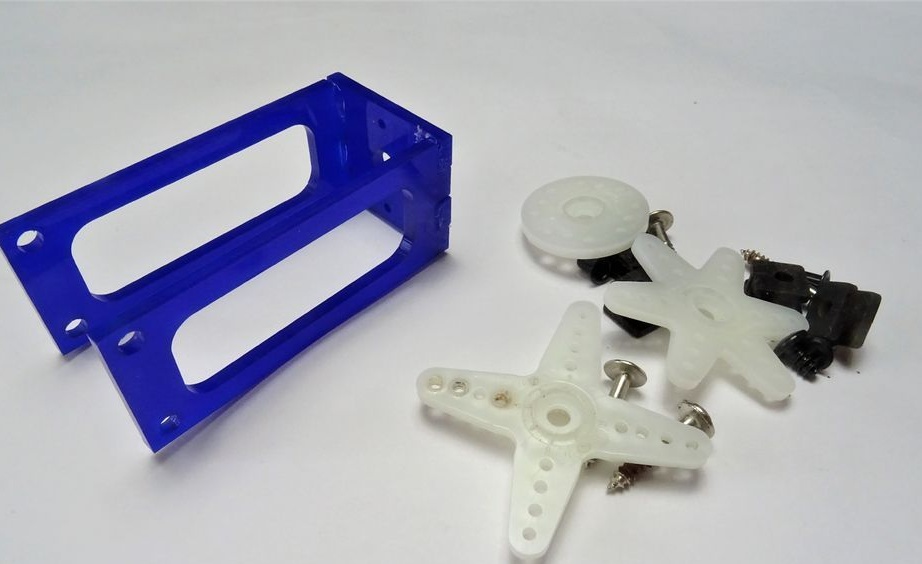
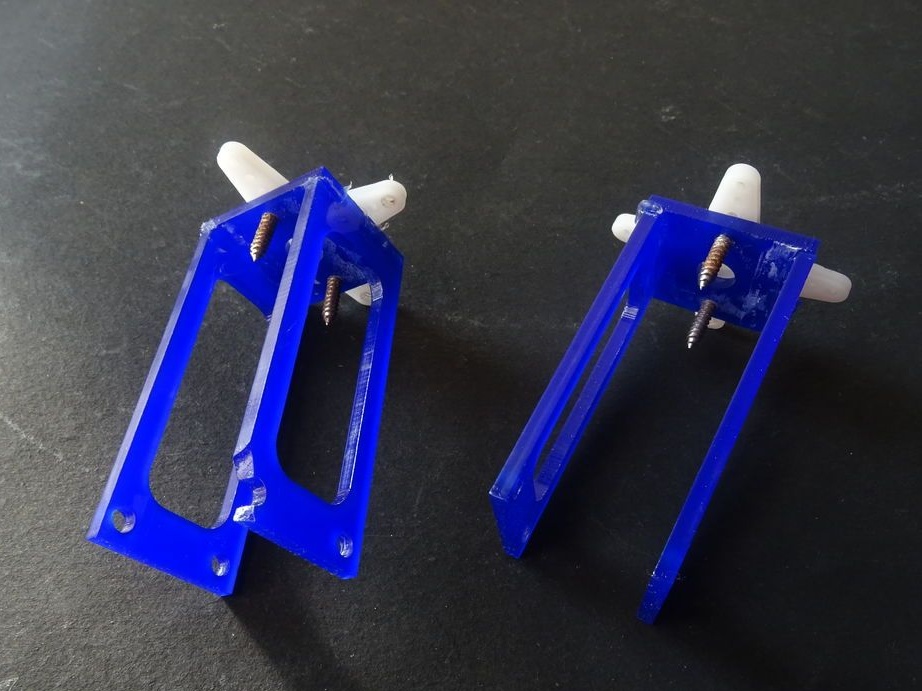
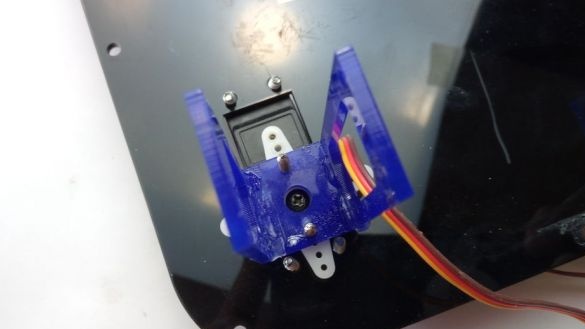
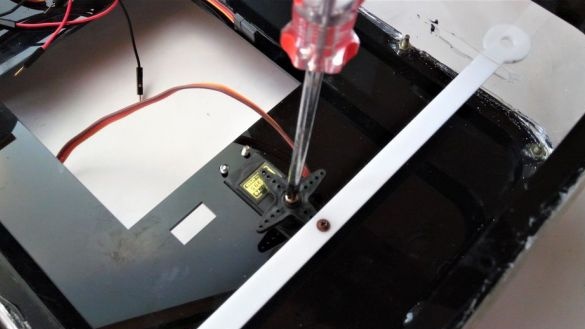
Steg tre: Installera Servomotorer
Alla tre servomotorerna är skruvade på plattformen. Två på baksidan och en framtill.

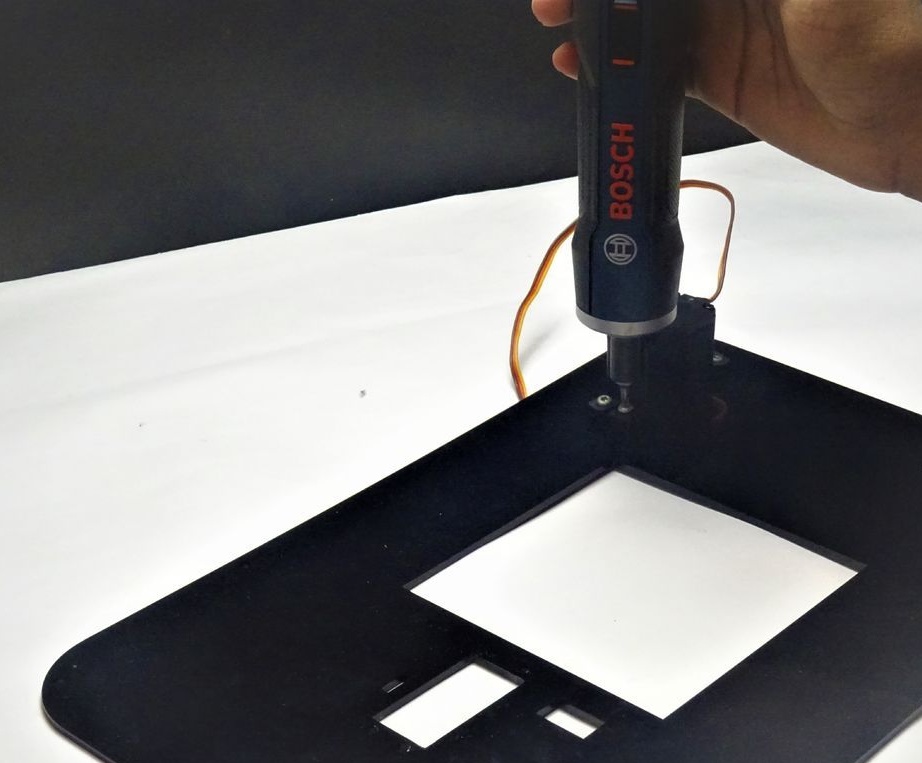
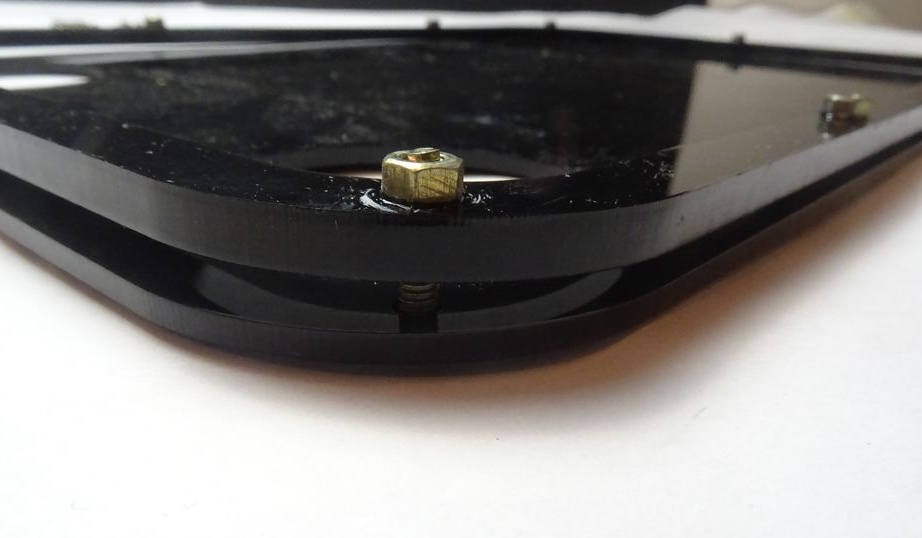
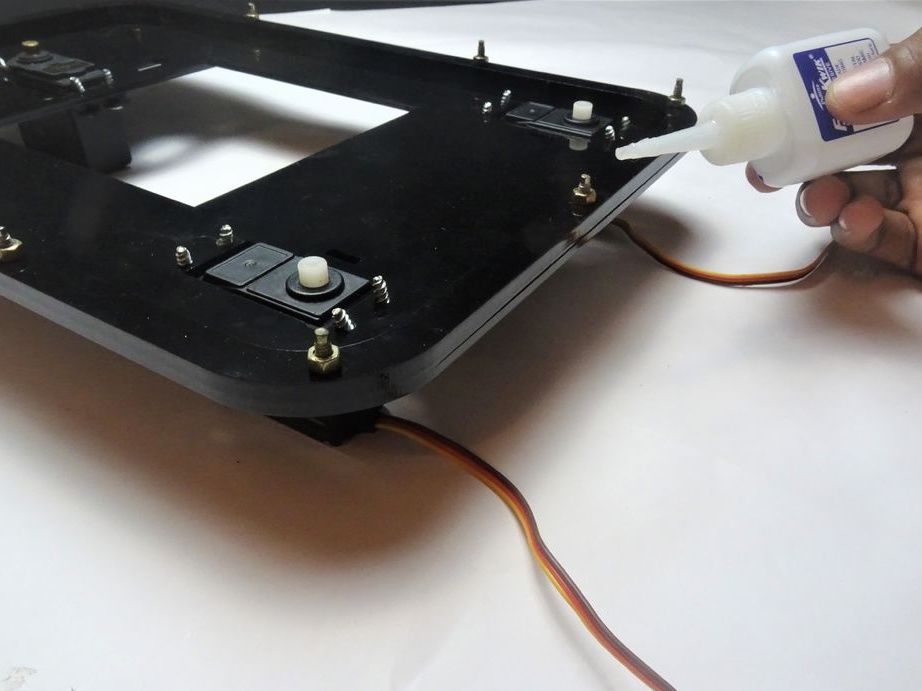
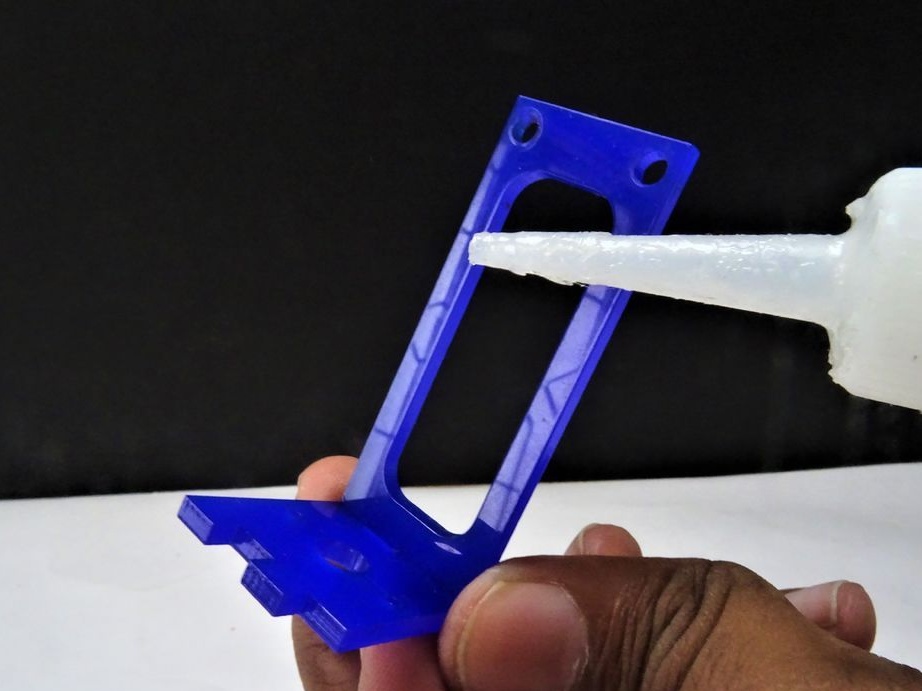
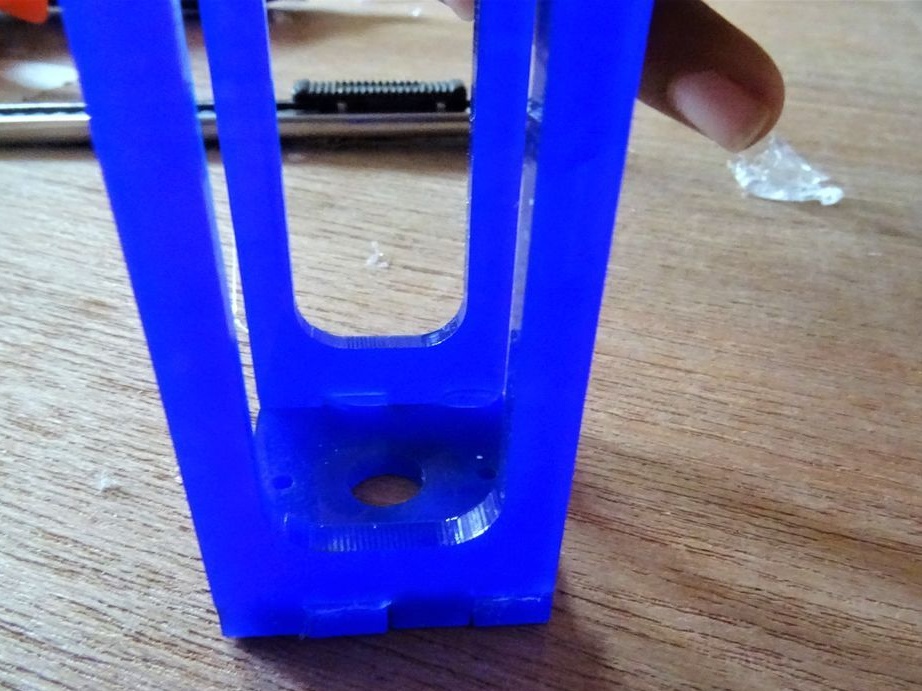
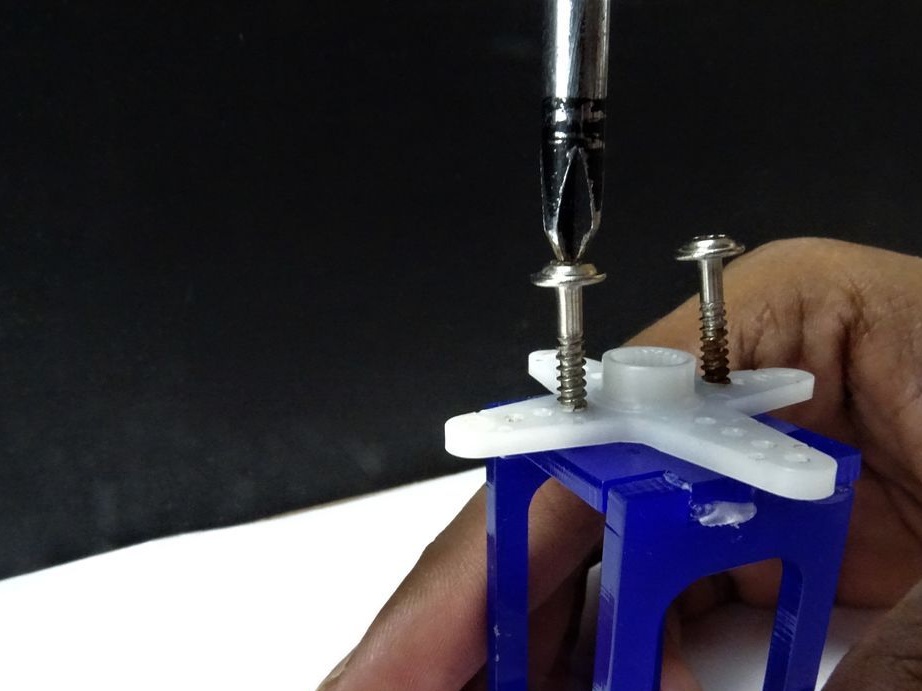
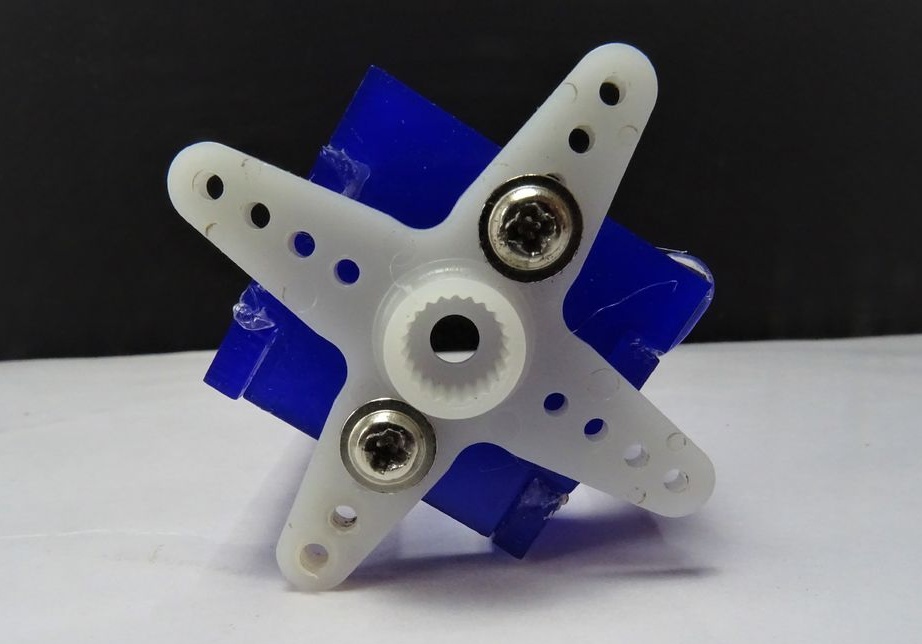
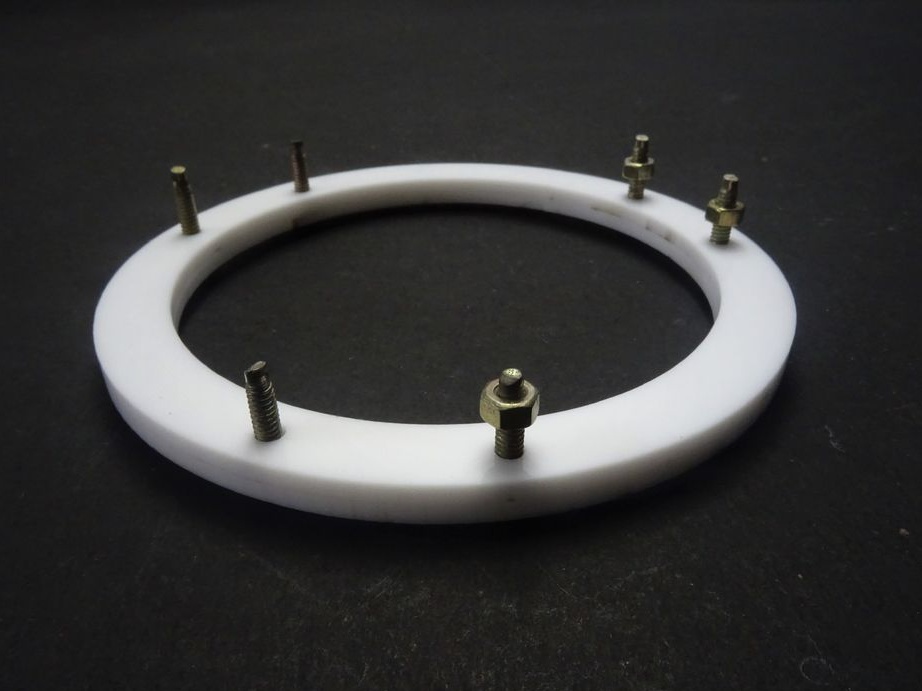
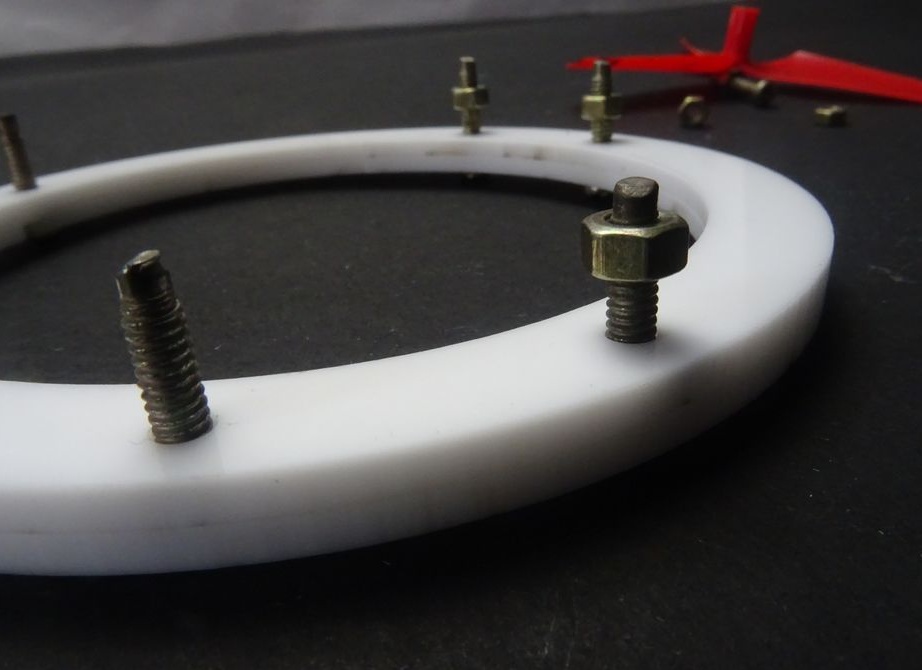
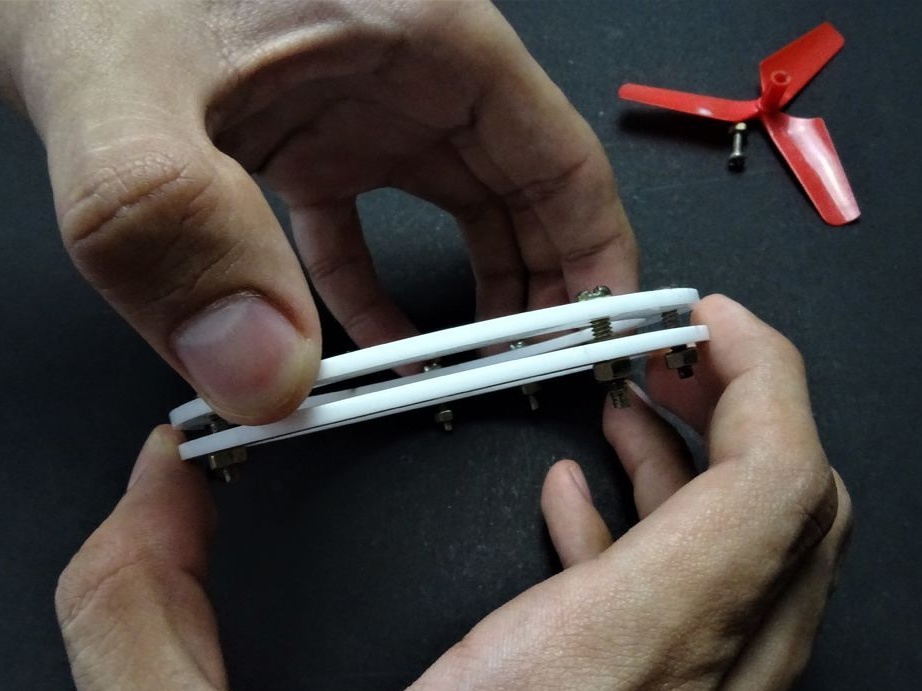
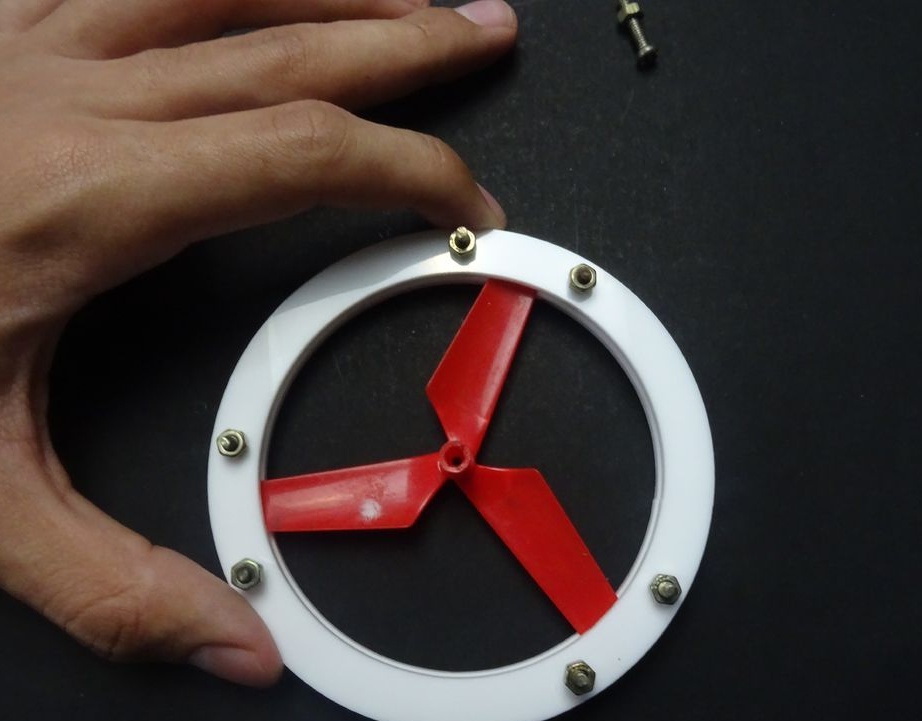
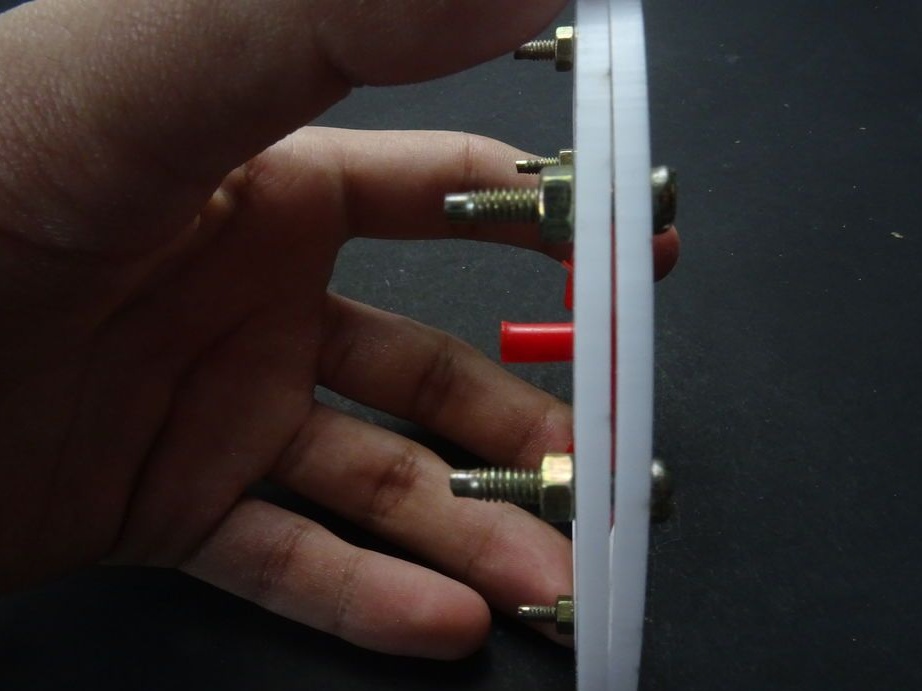
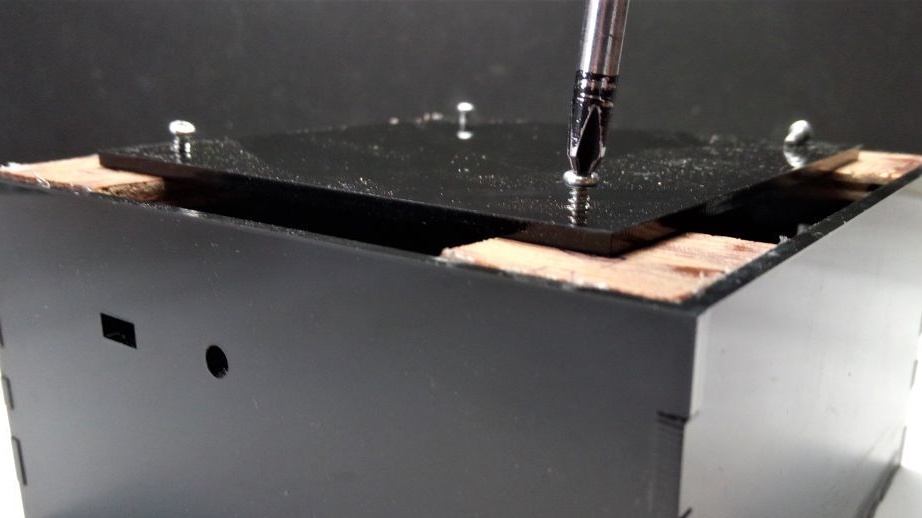
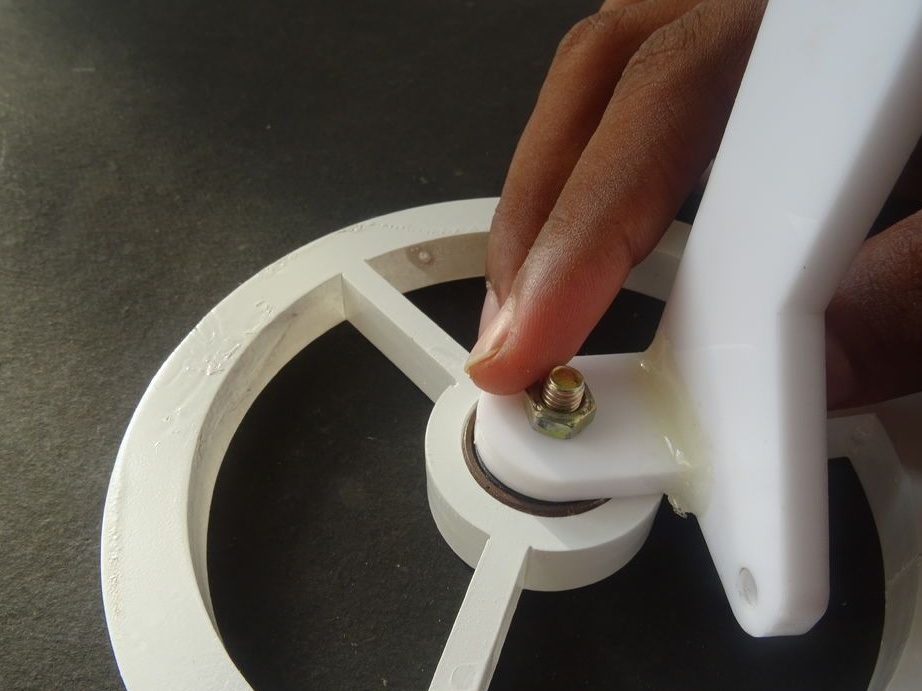
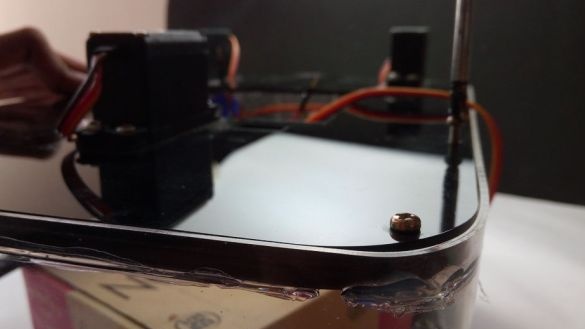
Steg fyra: nötter
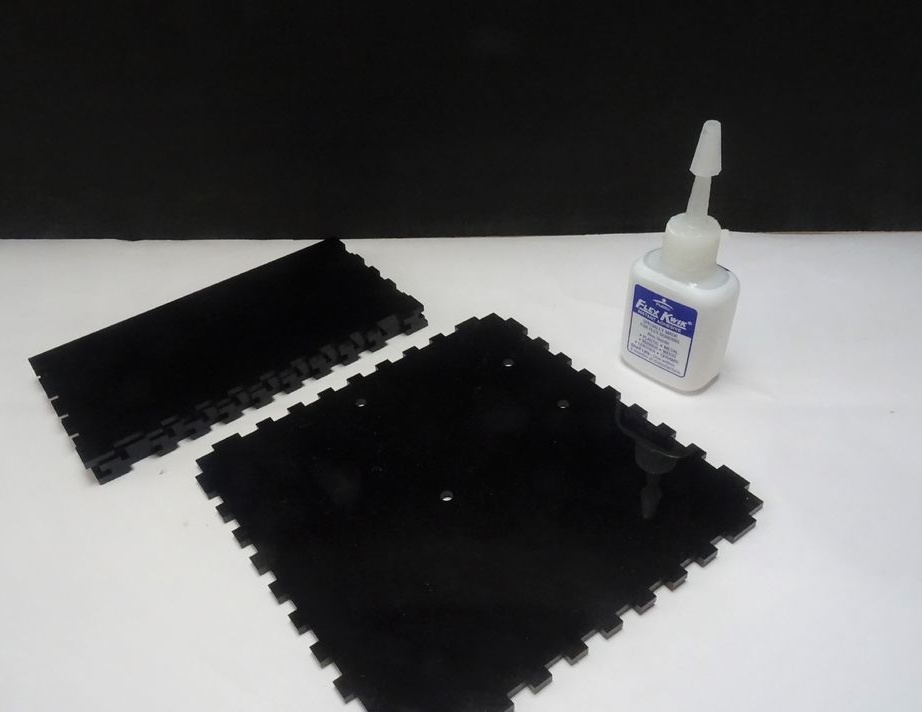
För åtkomst till mekanismerna är de övre och nedre delarna bultade ihop. Limma muttrarna på superlimet på ramen och förstärker sedan den med epoxi.


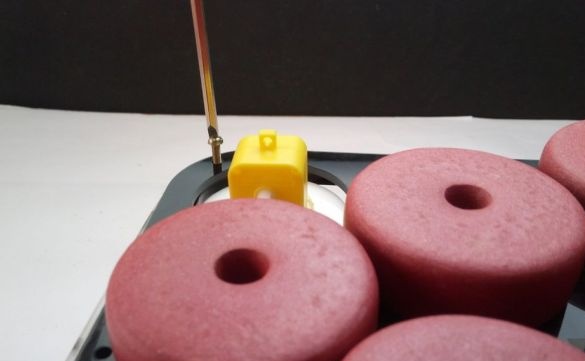
Steg fem: Floats
Lim flyter.



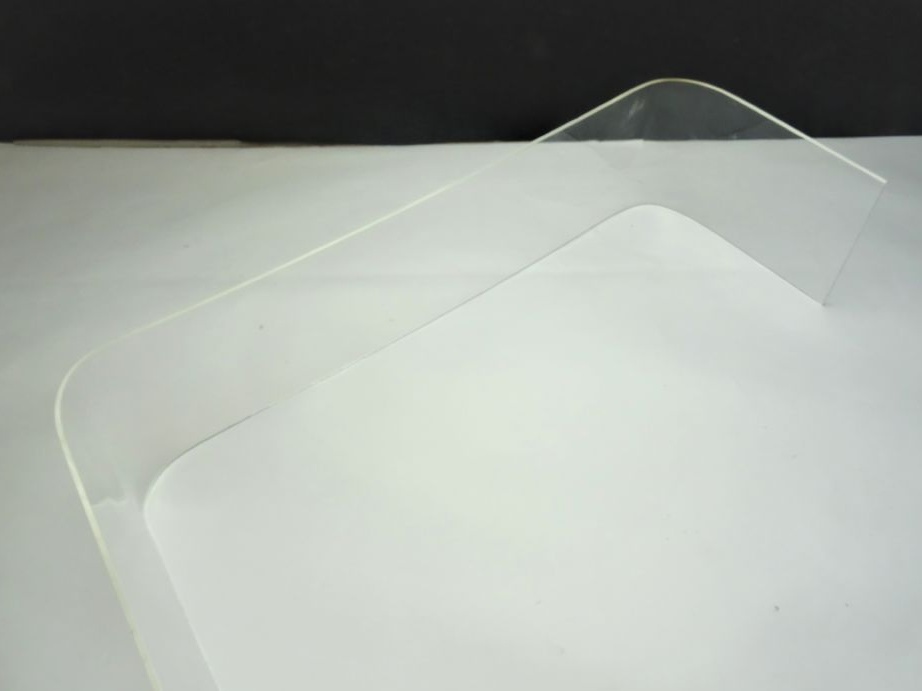
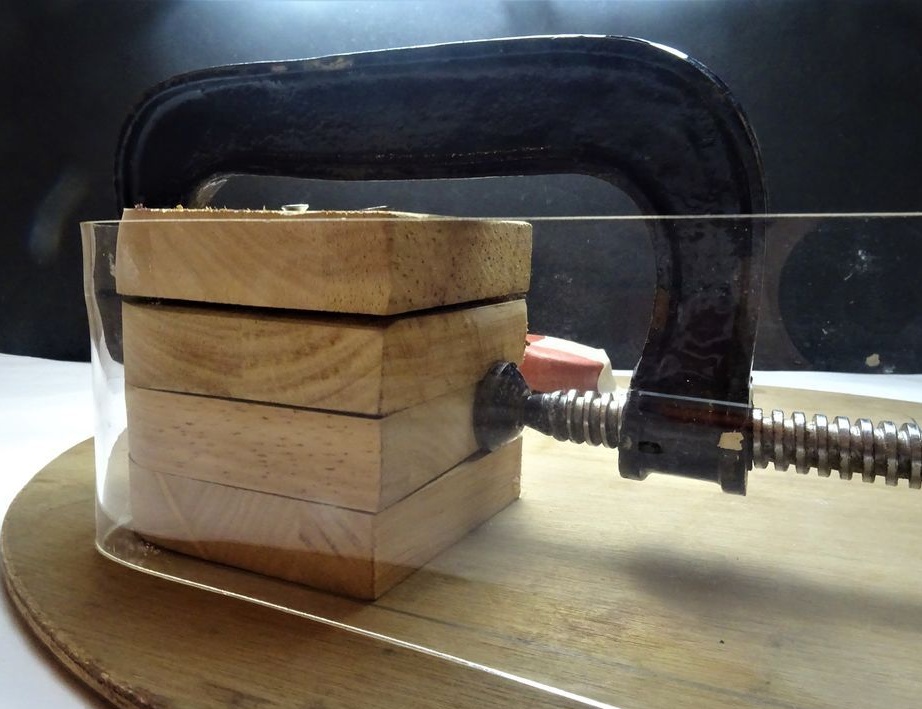
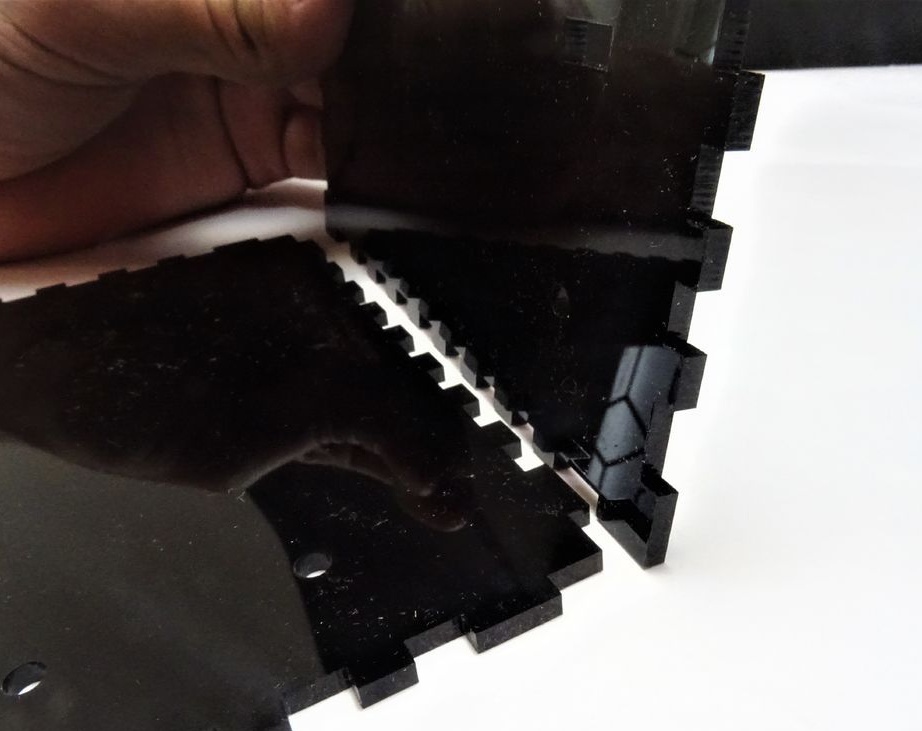
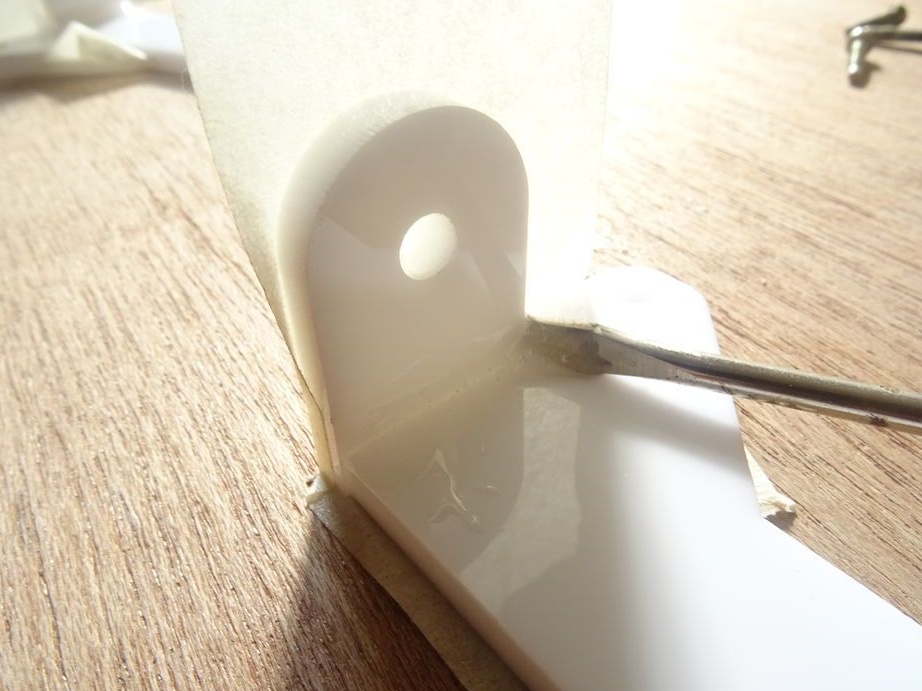
Steg sex: Forma akryl
För att böja akryl gör en hantverkare en mall från trä.



Han klämmer fast delen med en klämma och värmer den med en hårtork, ger delen den önskade formen.





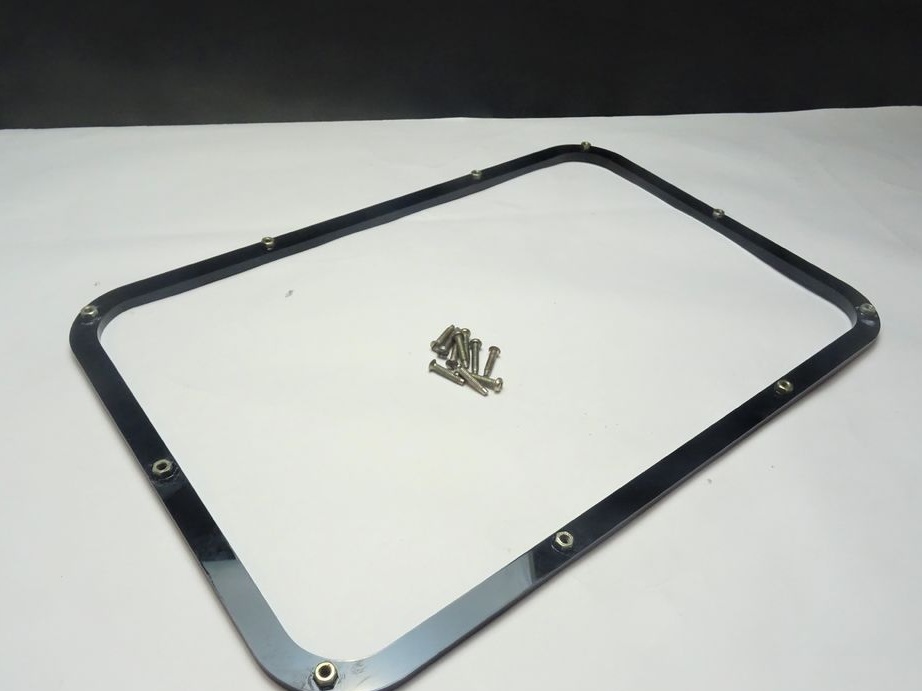
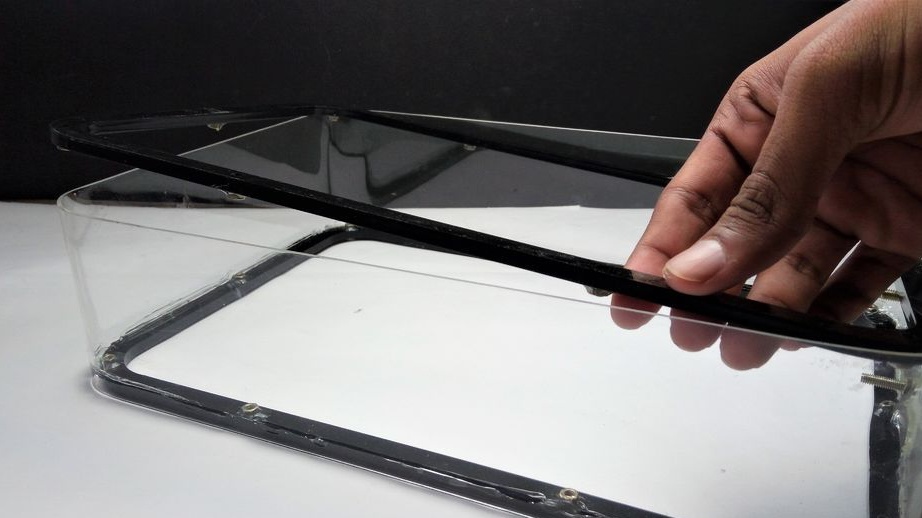
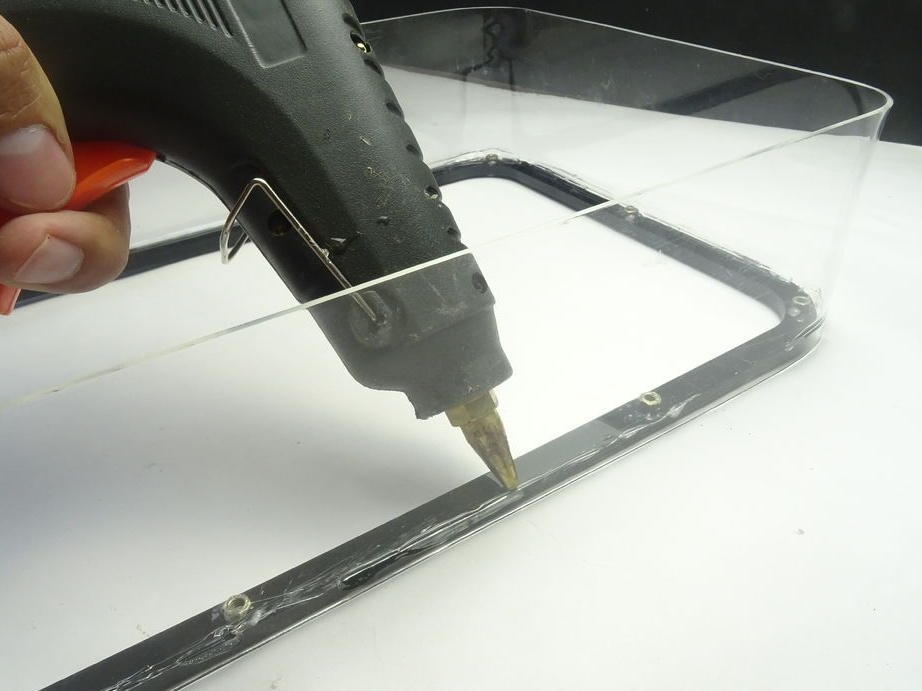
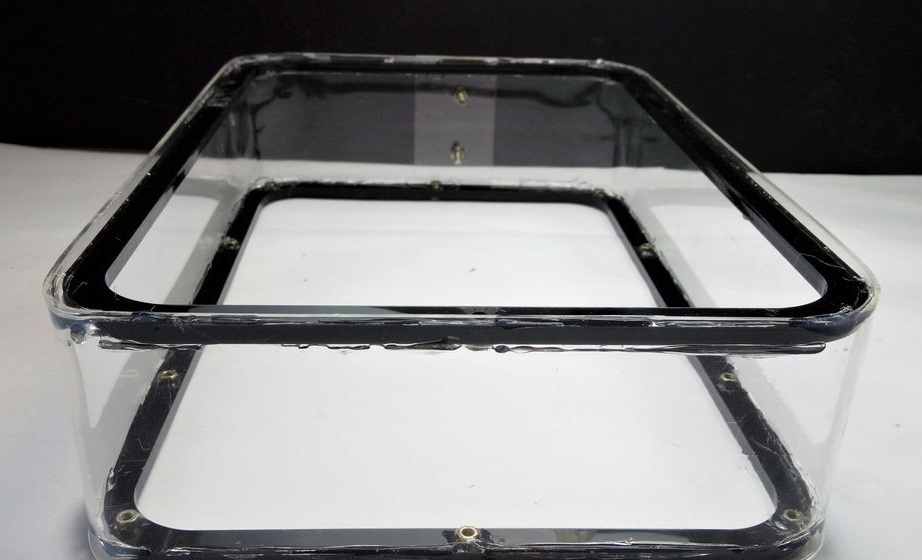
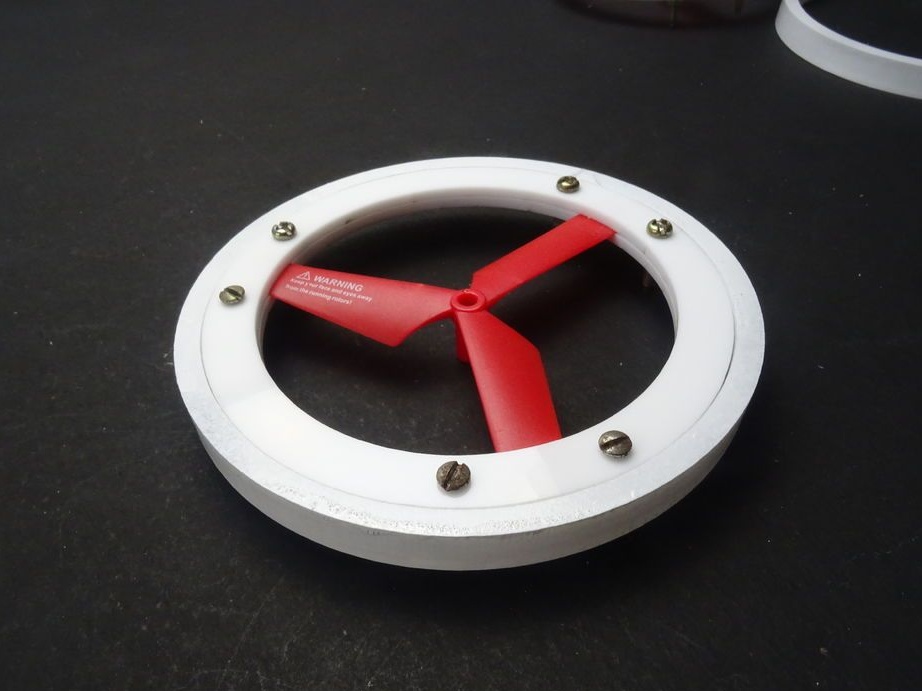
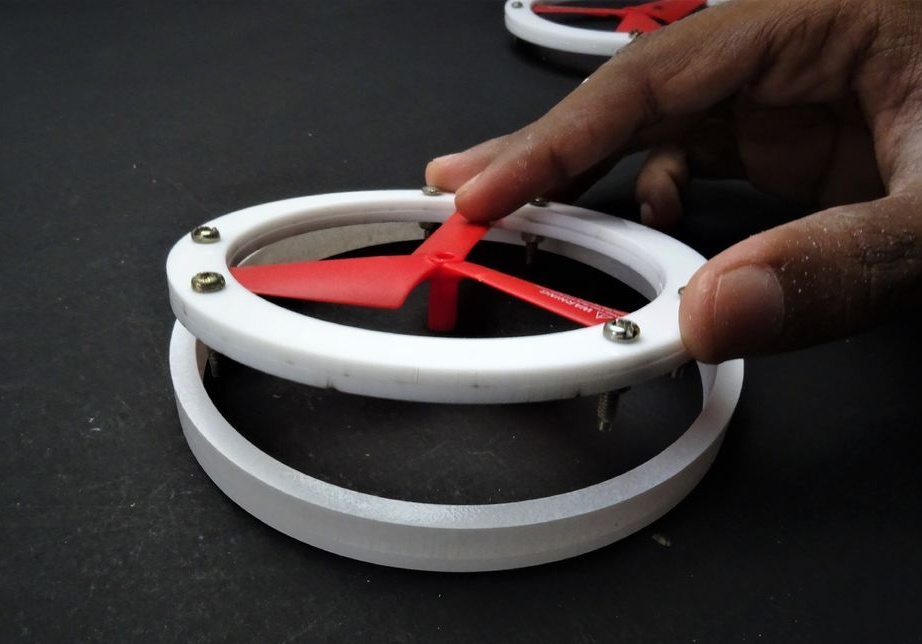
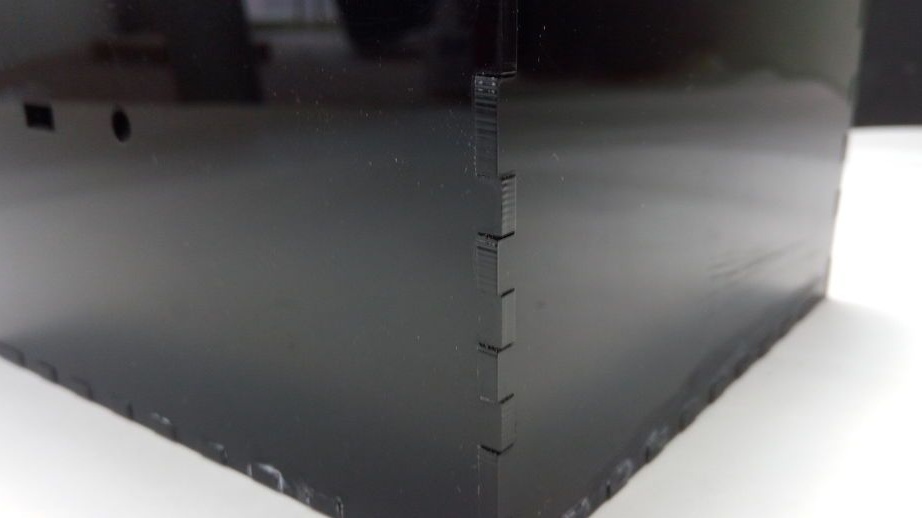
Sjunde steg: ramverk
Limer de övre och nedre ramarna på den transparenta kroppen. Sömmarna är försiktigt tätade med hett lim.







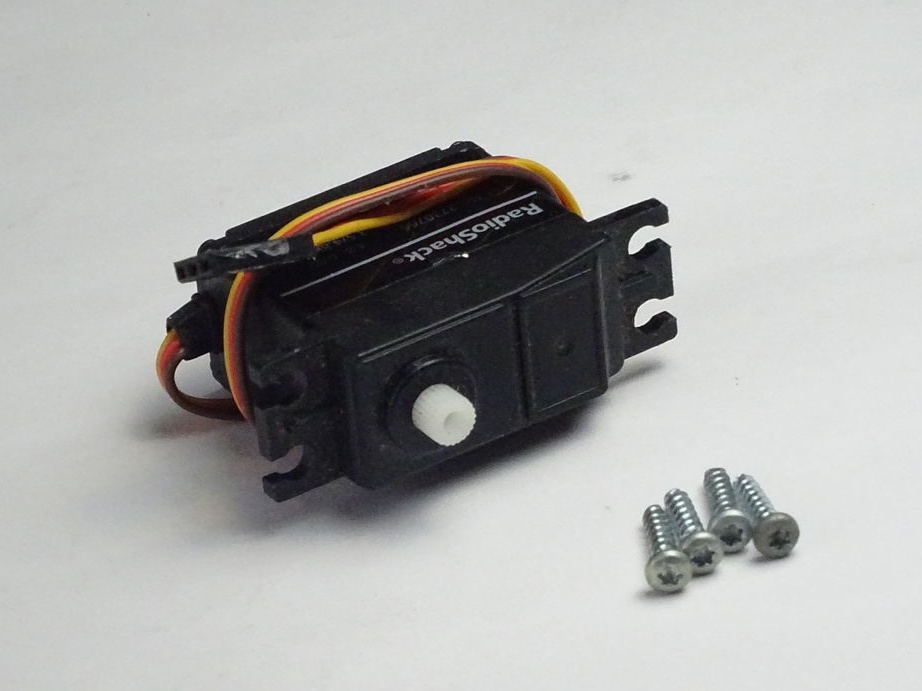
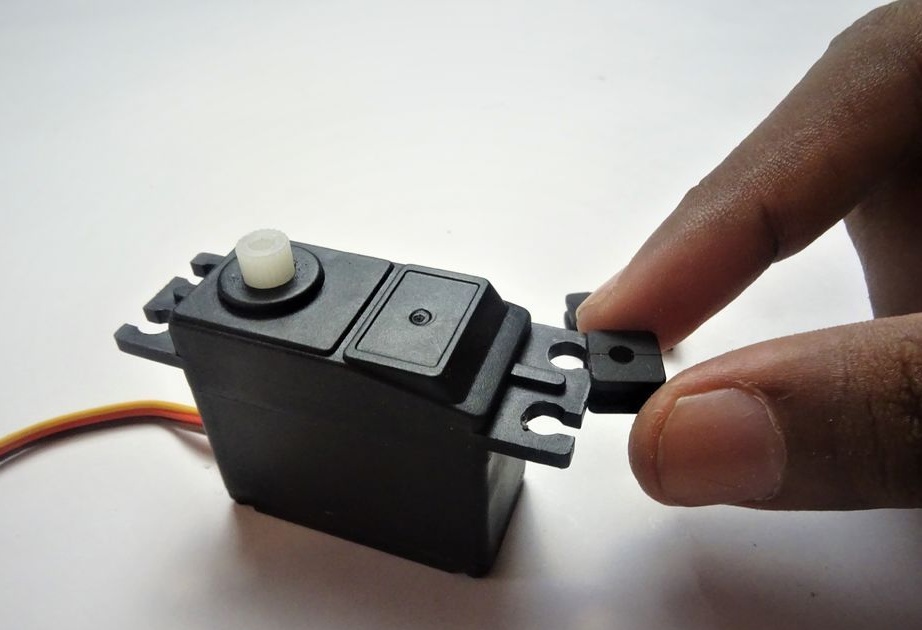
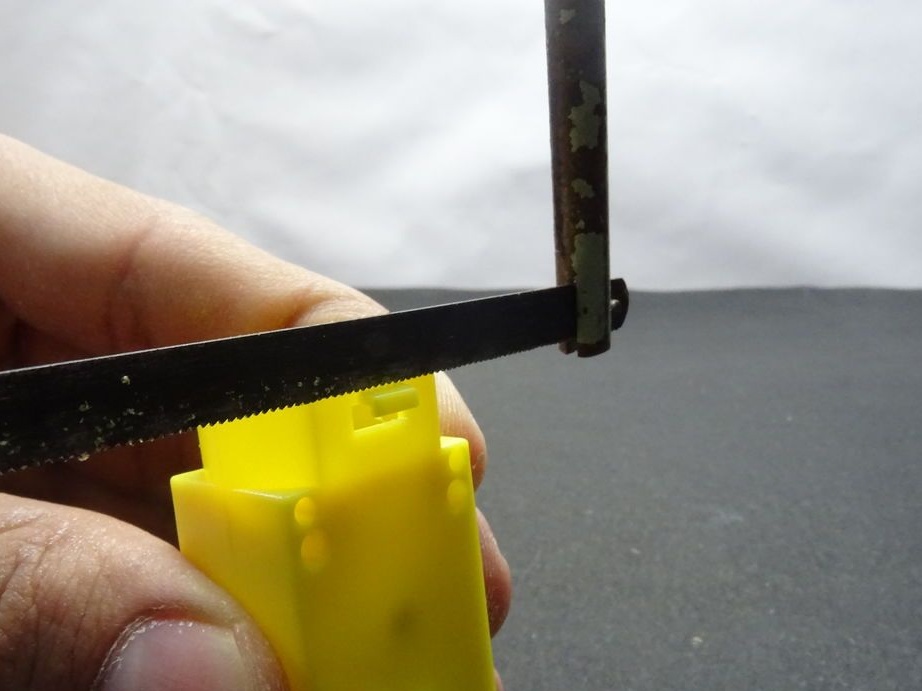
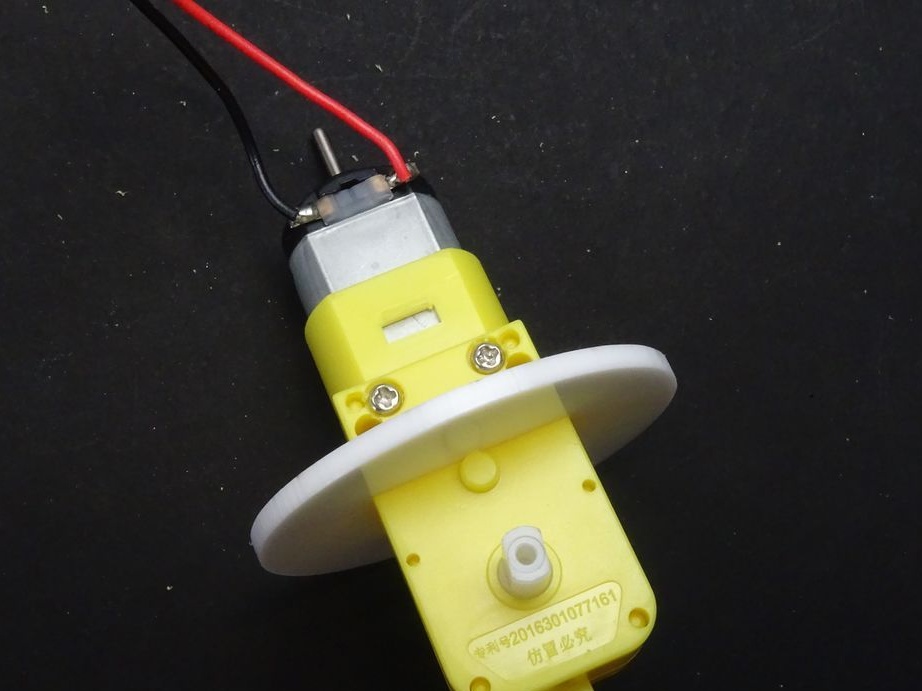
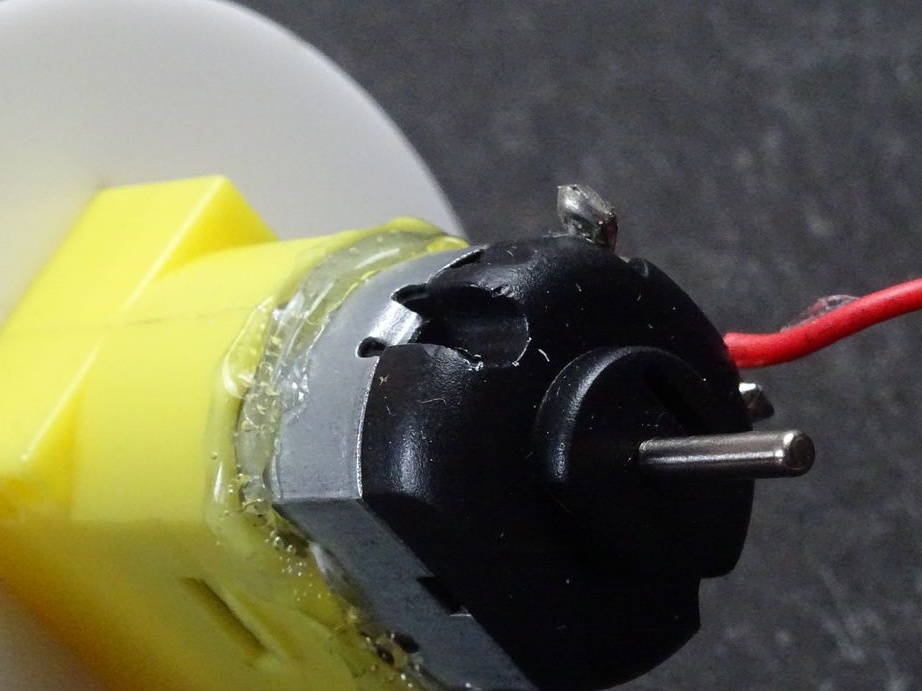
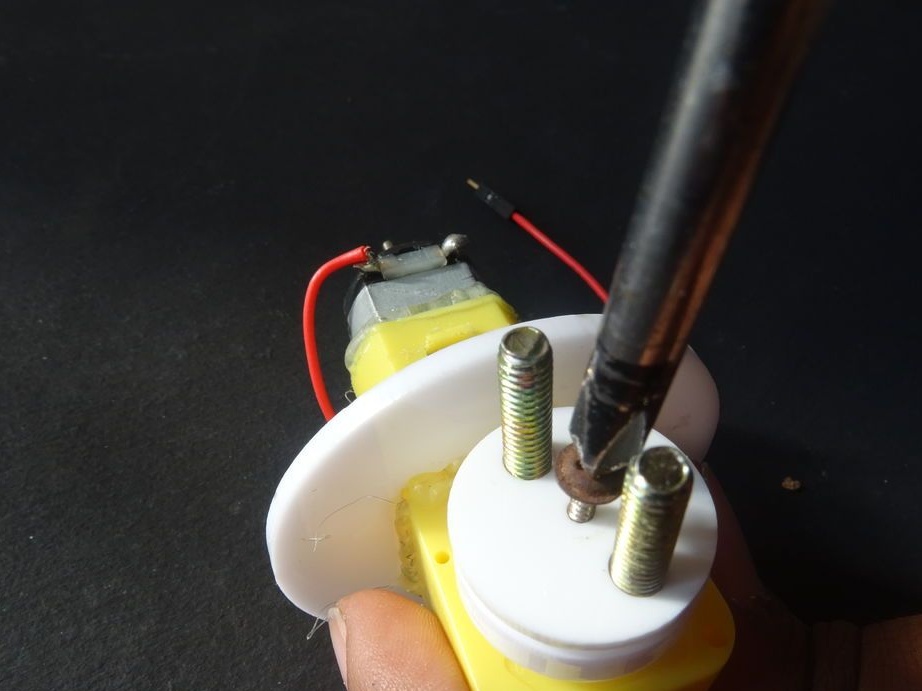
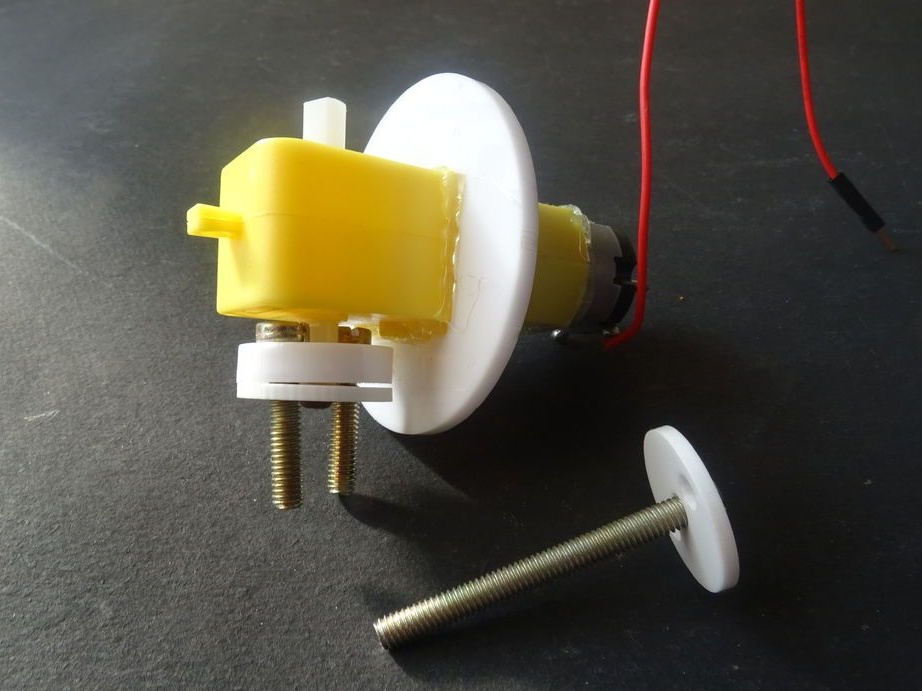
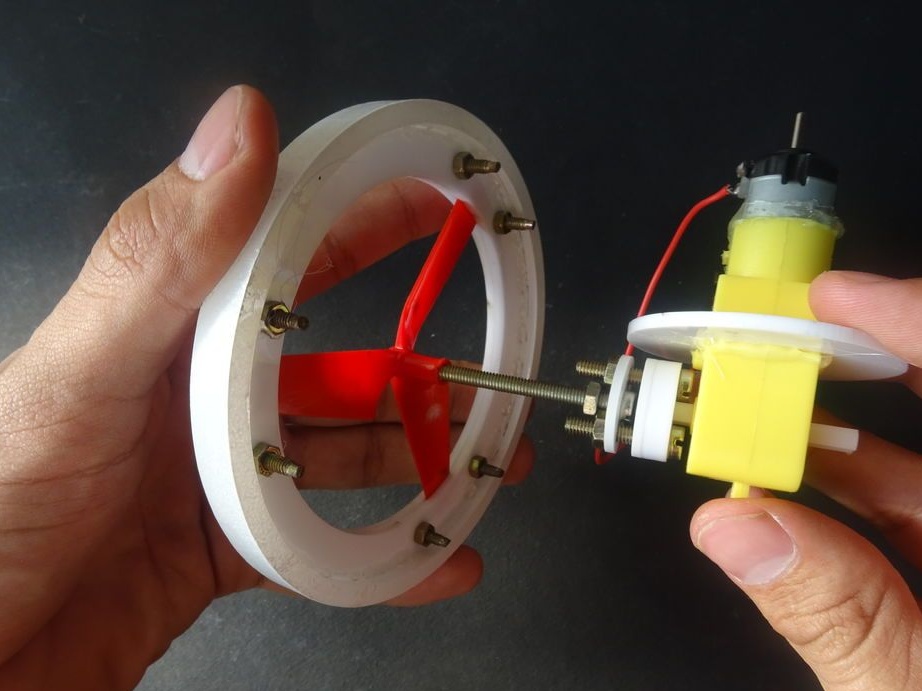
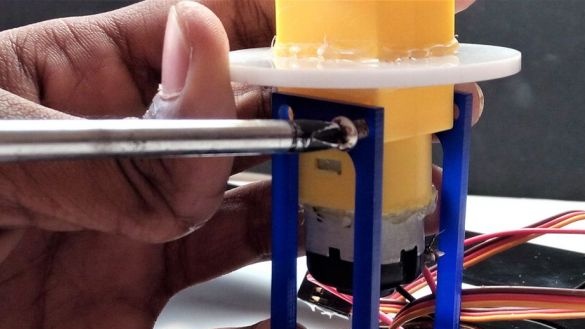
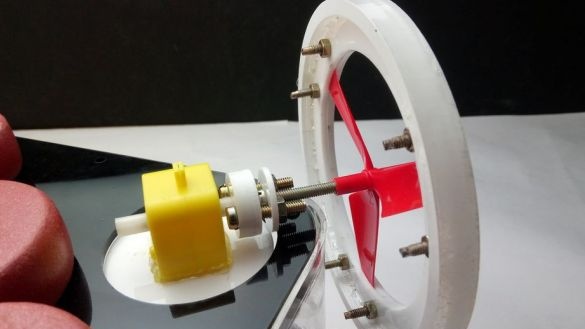
Steg åtta: Motortuning
Nu måste du bearbeta motorhöljet för att installera delar på det.
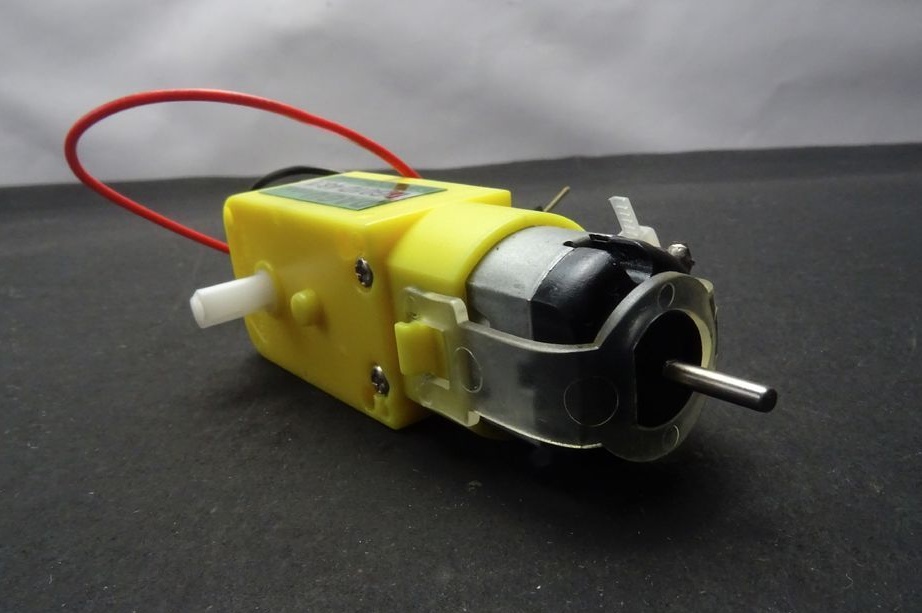
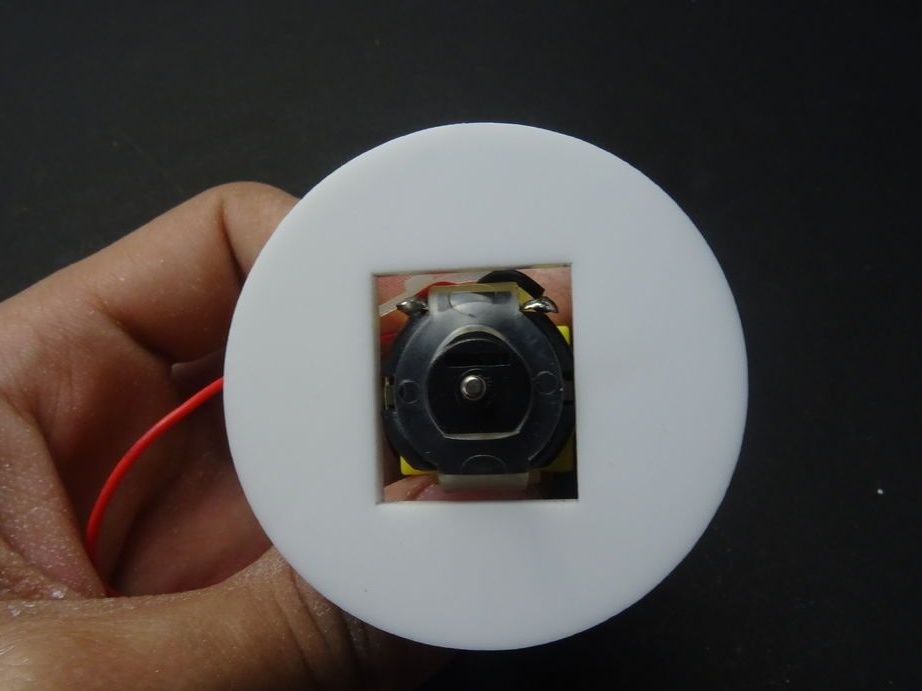
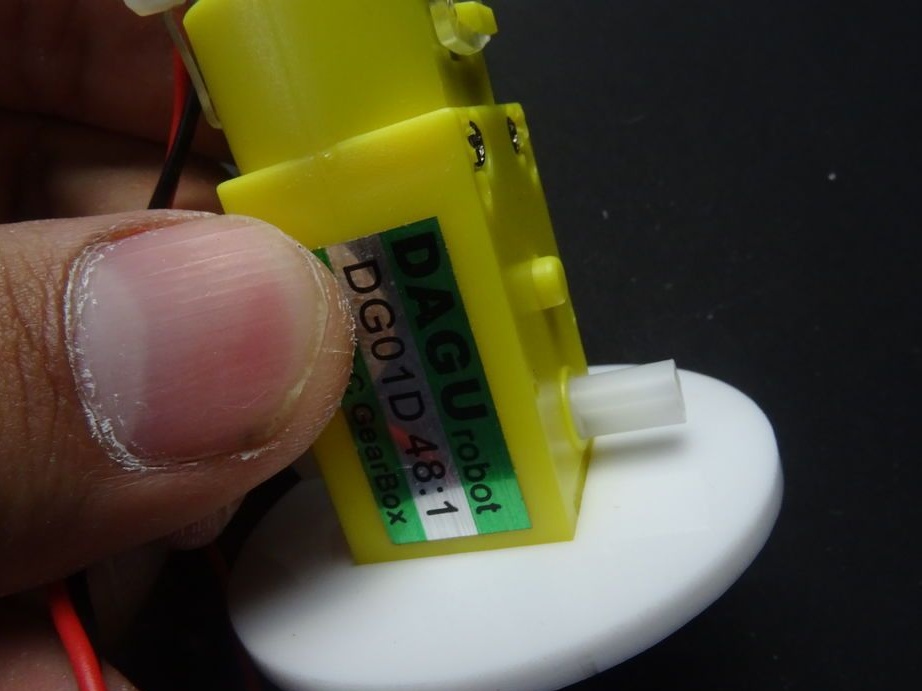

Skär bort alla utskjutande delar från kroppen, upp till klistermärket.
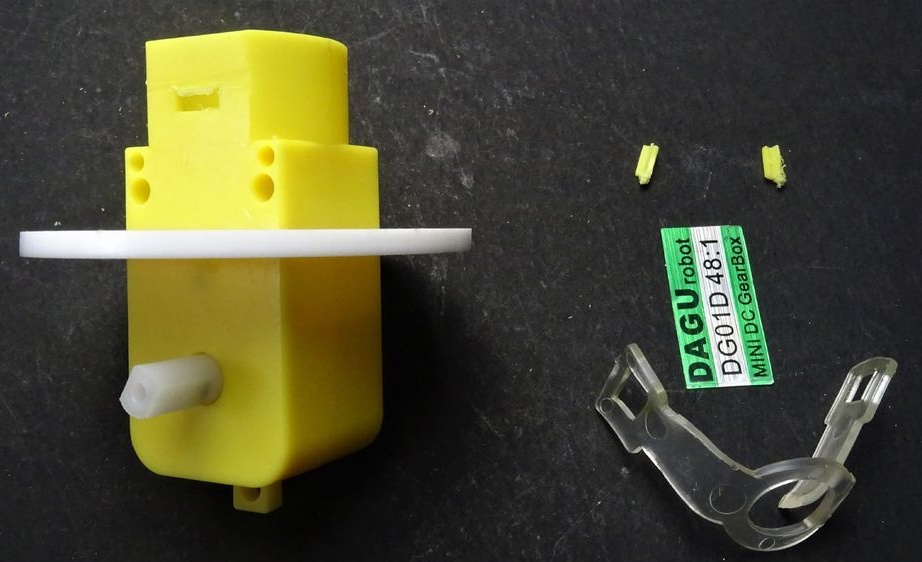

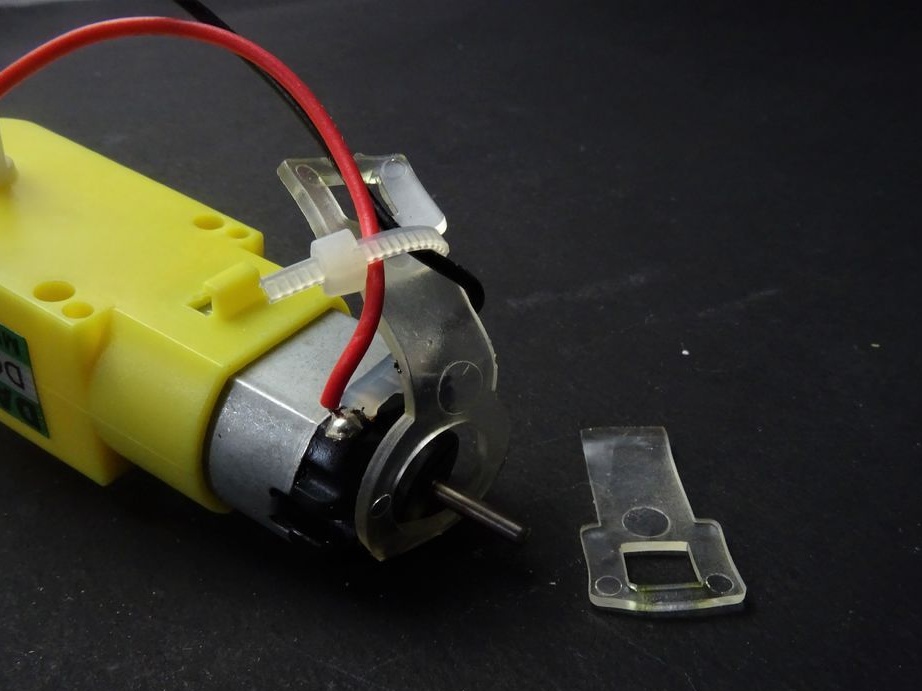


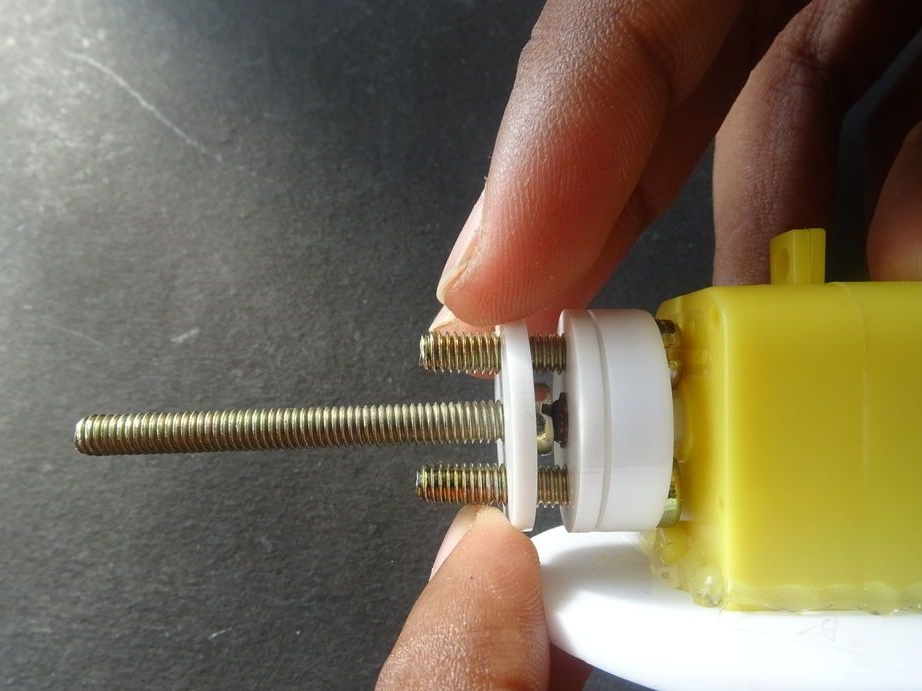
Installerar delen på kroppen och limmar den. Eftersom det var nödvändigt att stänga av motorfästet (spärrarna) fixeras även motorn med lim.

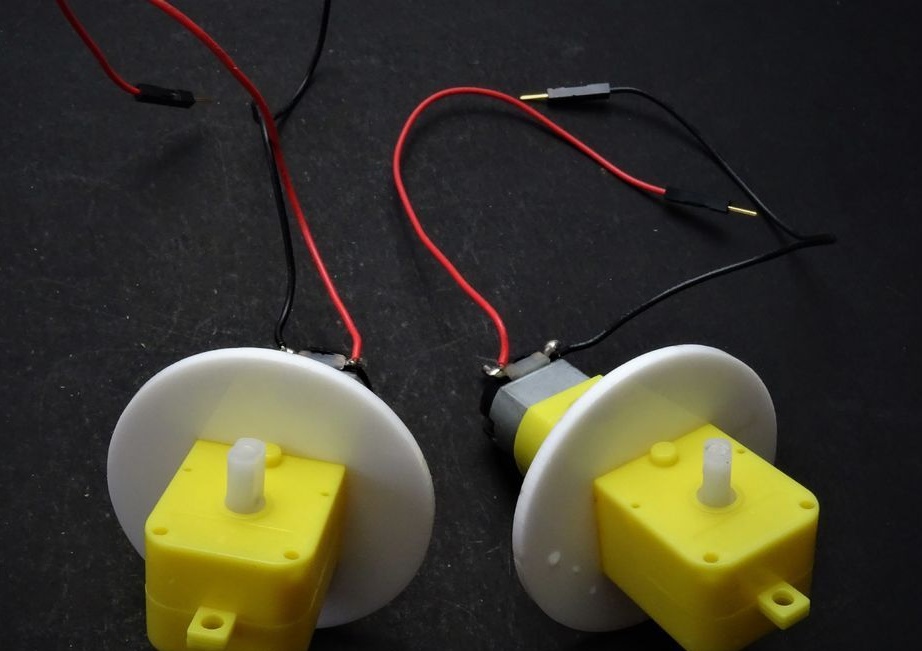

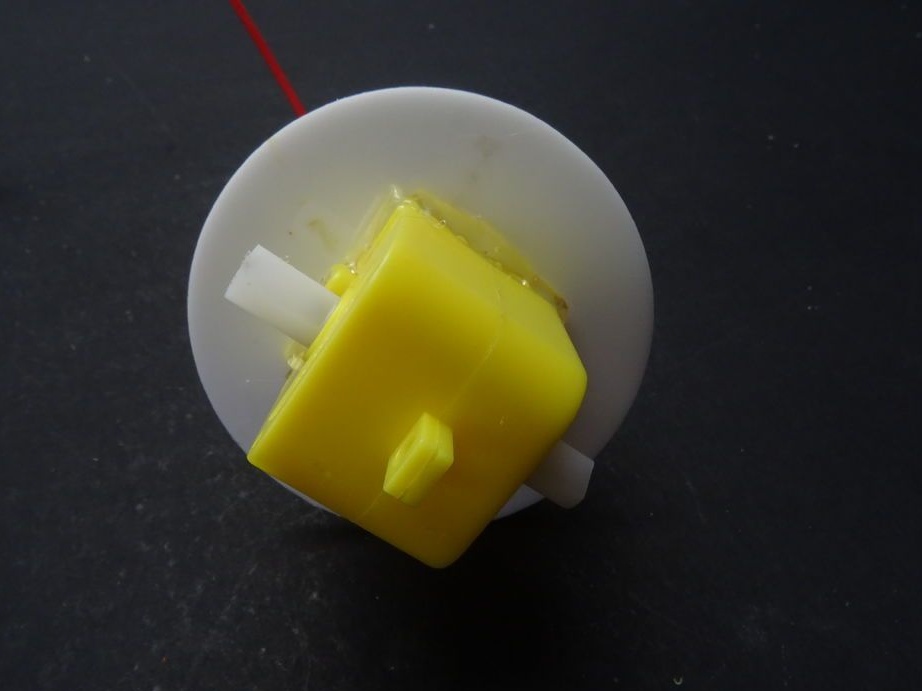
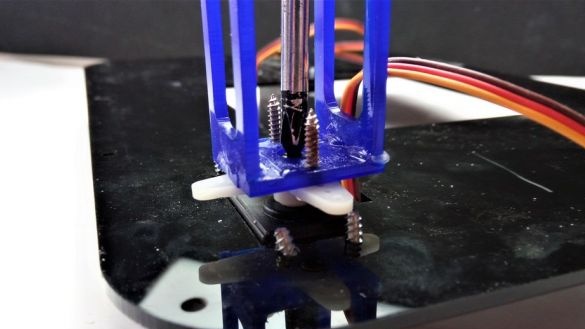
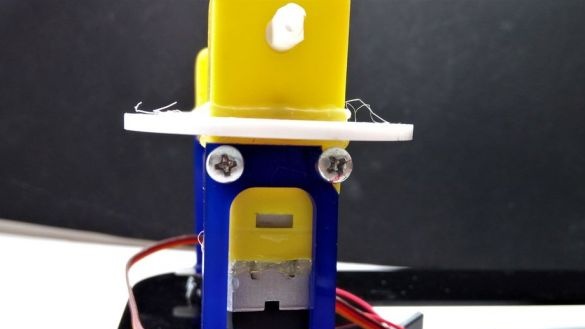
Steg nio: svängmekanism
Monterar ett roterande hus. En motor kommer att installeras i den och den kommer att anslutas till servodrivaren.
Limma fallet.


Skruvar på kopplingen.


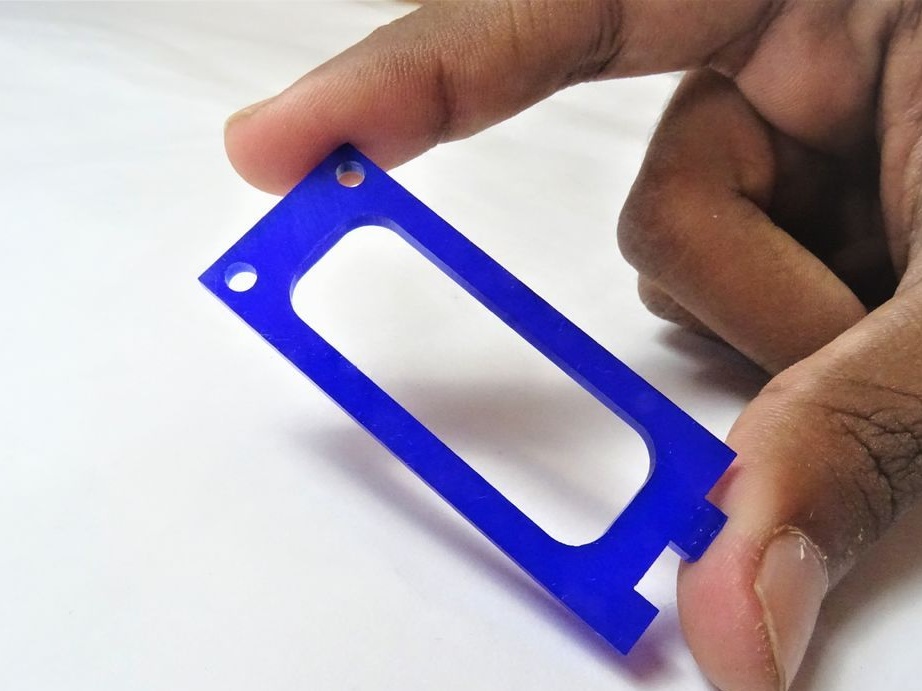
Steg tio: målning
Eftersom befälhavaren inte hade vit akryl med den erforderliga tjockleken klipptes hjulen och kanten av transparent akryl och målades sedan vit.




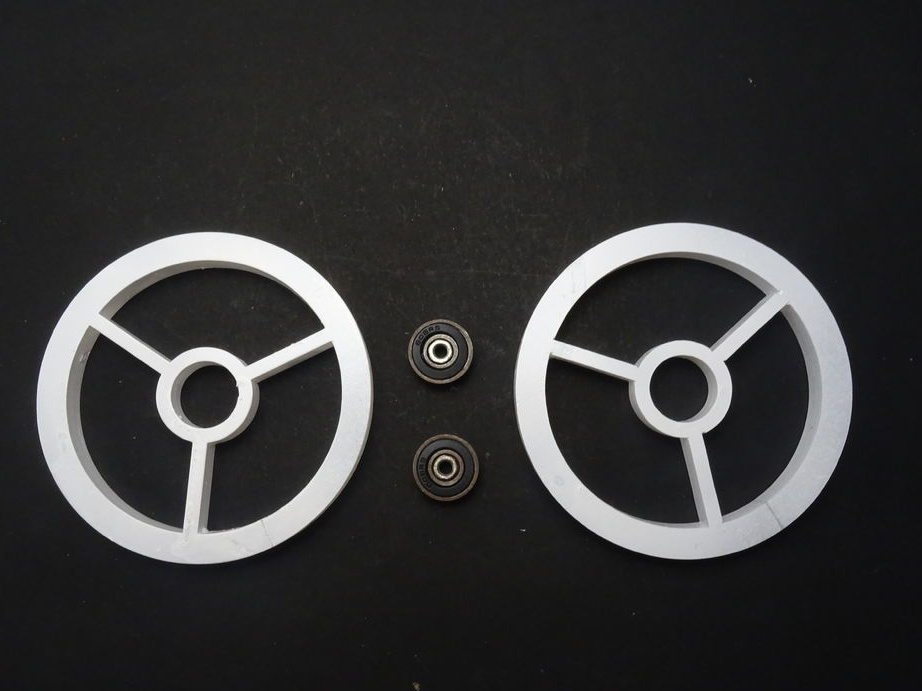
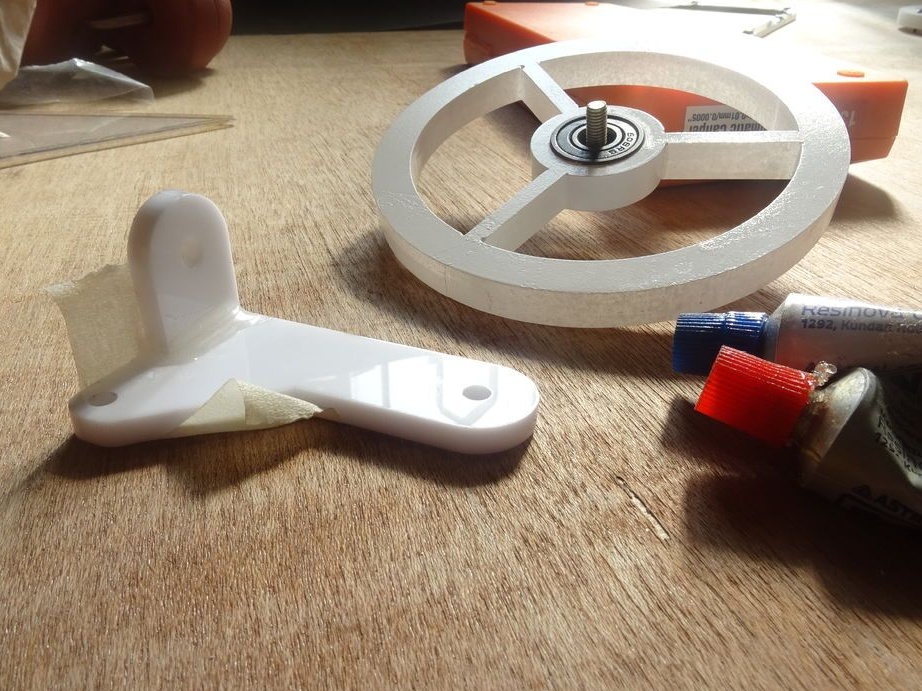
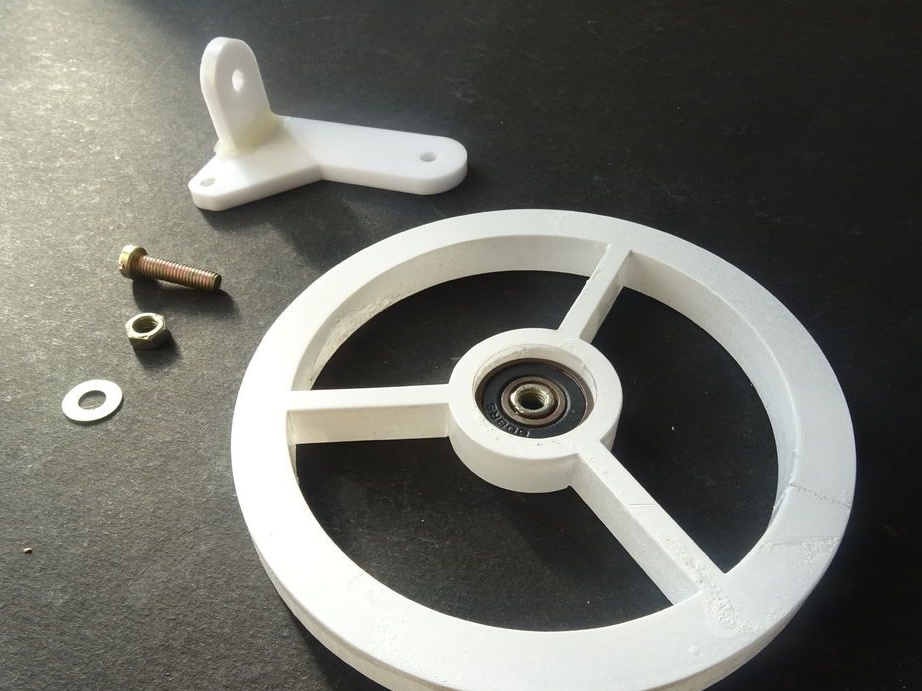
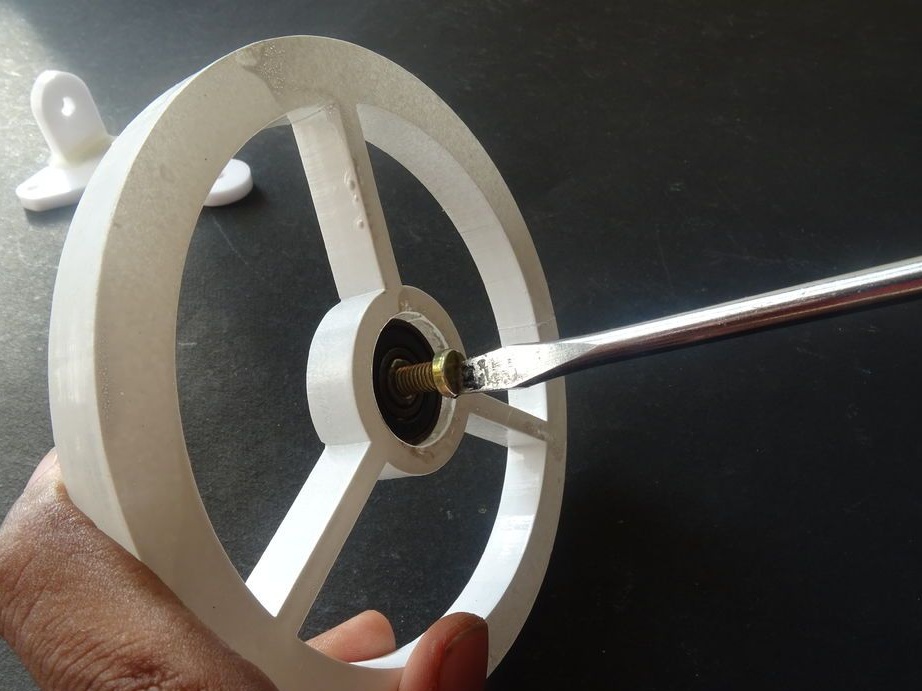
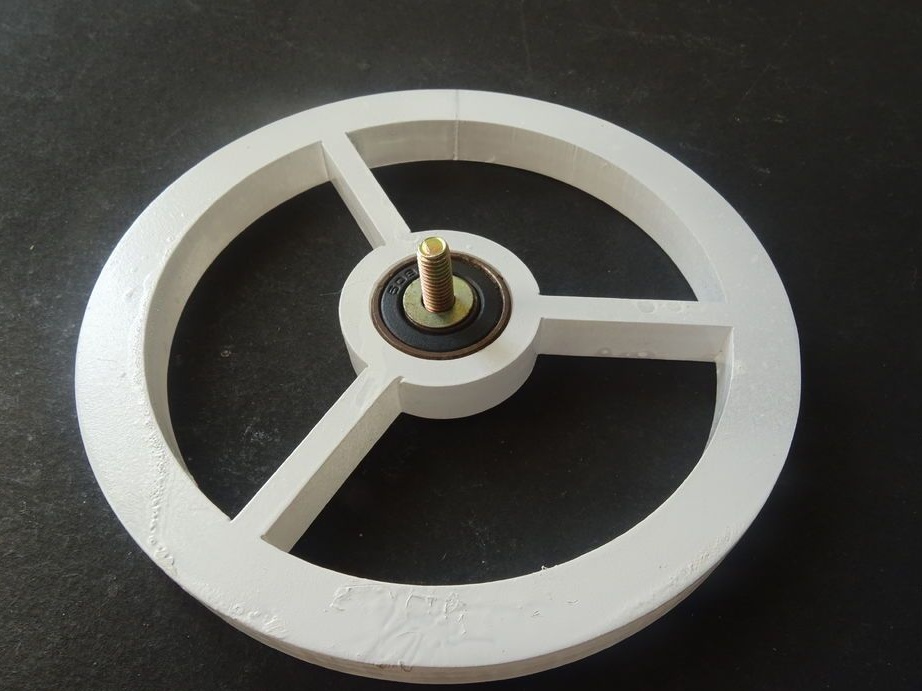
Steg elva: Hjulmontering
På bultar samlar två fälgar. Skruvarna är inte helt åtdragna.




Mellan skivorna installeras skruvar och dra åt skruvarna. När du installerar skruven måste du använda mallen för att centrera den.
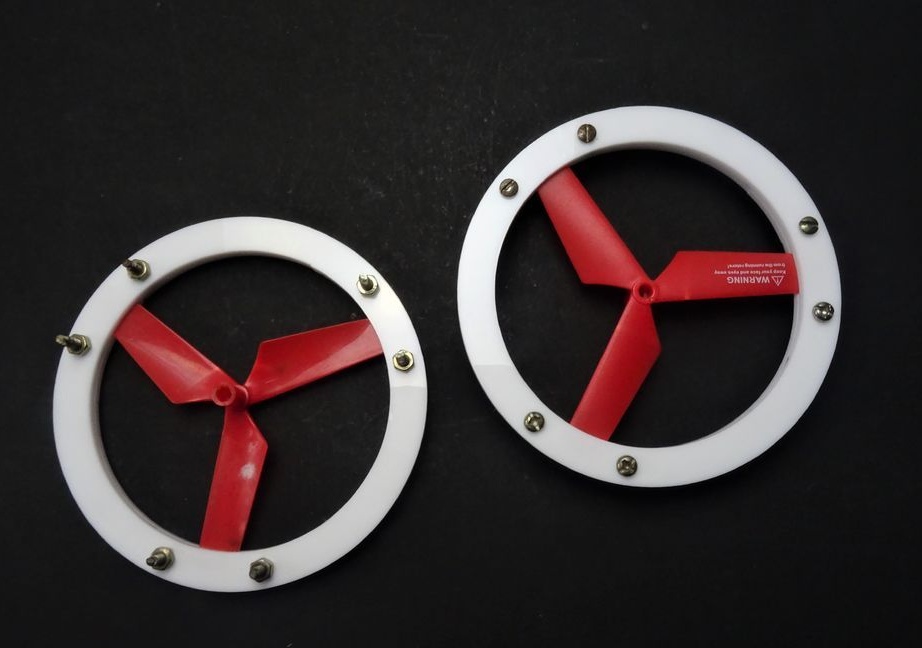
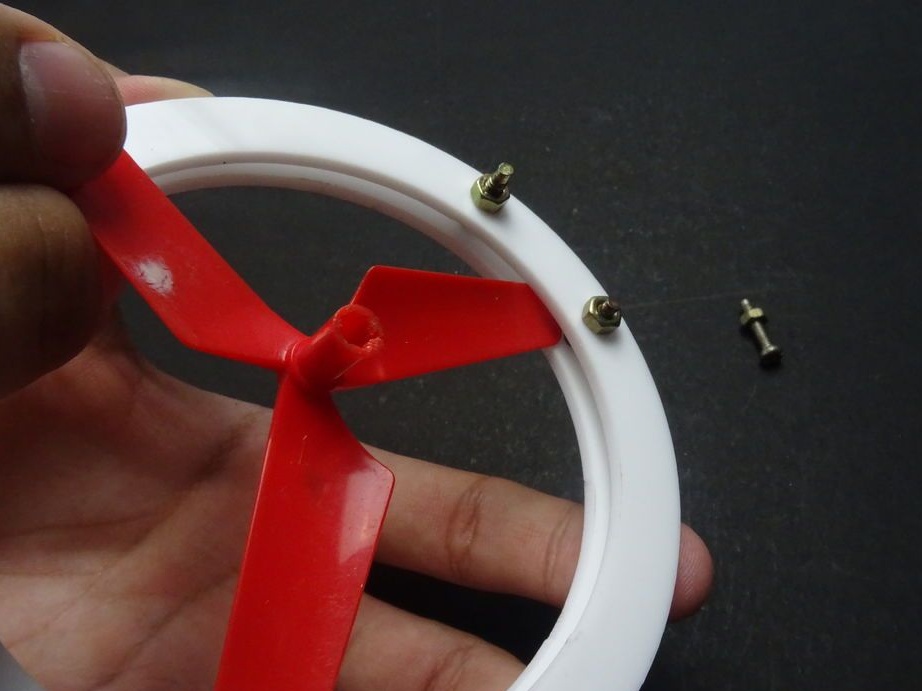

Ställer in den yttre kanten på hjulet. Fälgen måste vara i linje med den inre skivan.

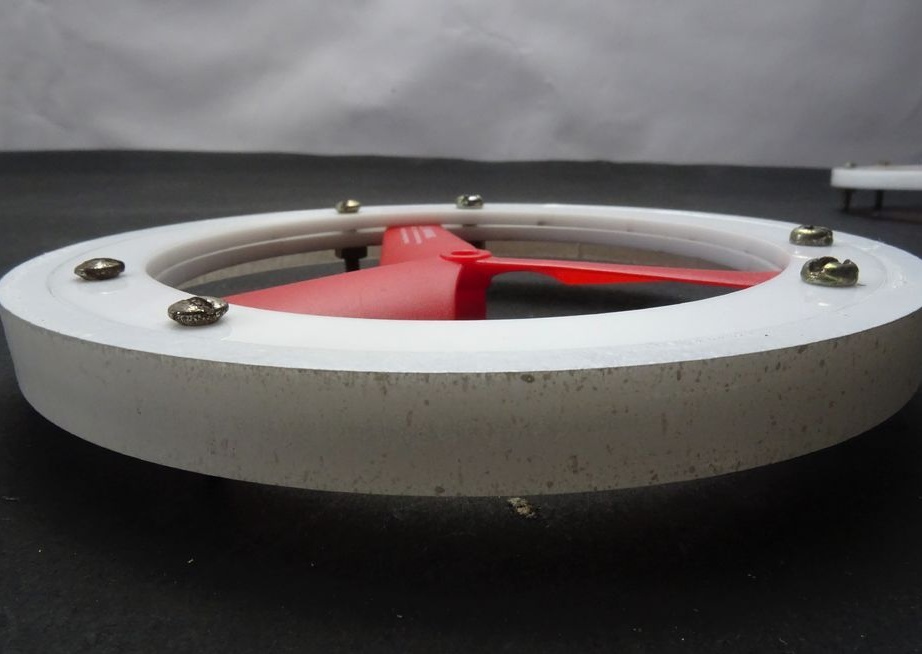

Applicera hett lim på fogen.


Samlar nu framhjulen.
En mutter av lämplig storlek täpper in i lagerets inre ras. Pressar lager i framhjulen.



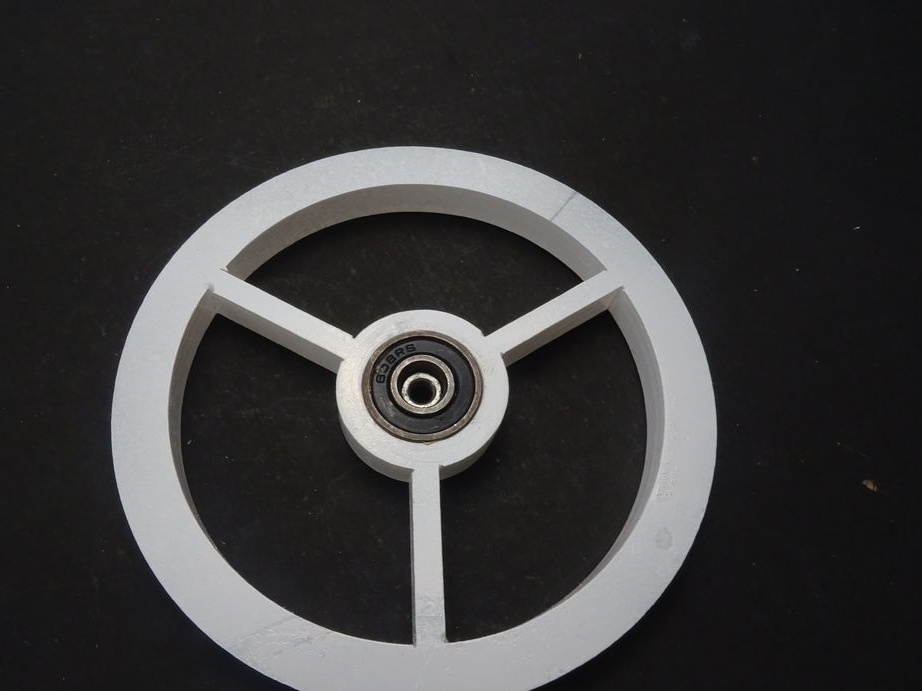
Hjulen är redo.

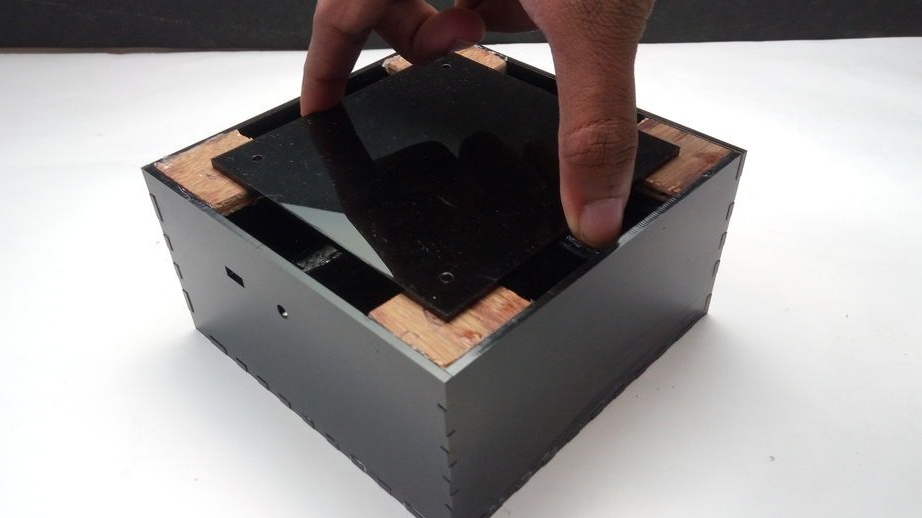
Steg tolv: Elektronikhölje
Limer höljet för elektroniken.

Den här rutan innehåller allt elektronisk komponenter, vilket innebär att det måste vattentättas så noggrant som möjligt.


Fyra rutor skärs och limmas från brädet i lådans hörn. Lådans lock kommer att fästas på dem.



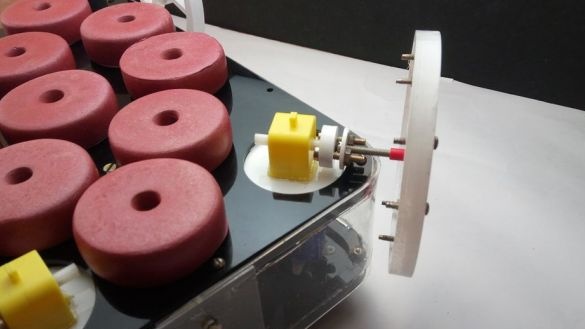
Steg tretton: Hjulmontering
Nu måste du ansluta hjulen och växeln med en koppling.





Skruvar framhjulen för dragkraft.


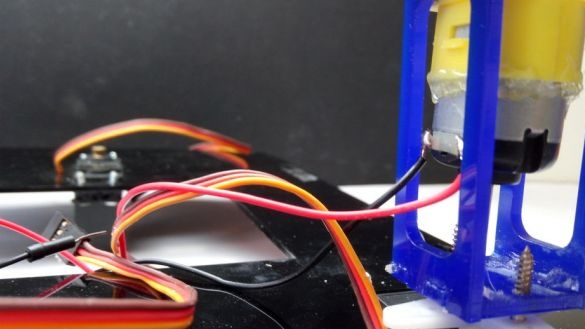
Steg fjorton: Anslut elektronik
Enligt schemat installerar det elektriska delar.
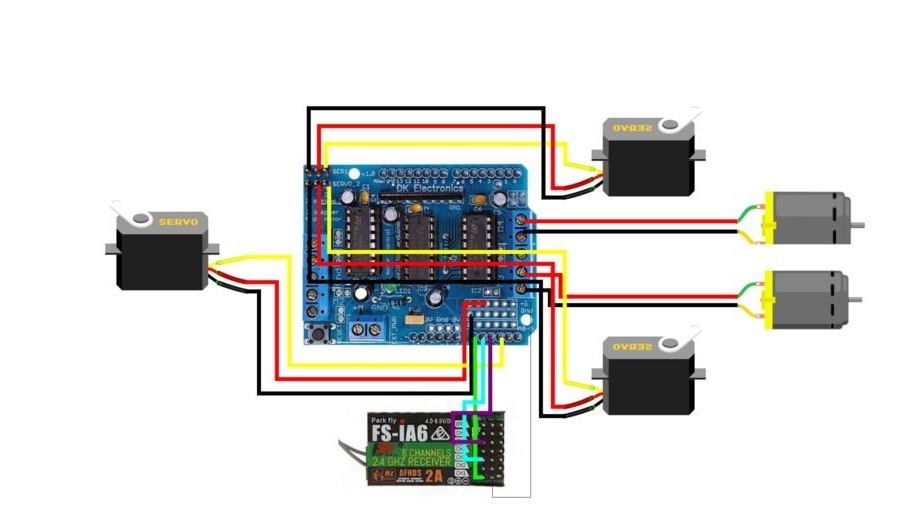

Ledningarna på den vänstra motorn till M1, höger till M2. Ansluter en motordrivare. Ansluter servon. Installerar mottagaren: gnd av mottagaren till gnd Arduino; +5 V-mottagare till +5 V Arduino; stift 3 till A0; stift 1 till Al; stift 5 till A2. Ansluter batteriet.
Steg femton: Ladda ner kod
Först måste du ladda ner biblioteket.
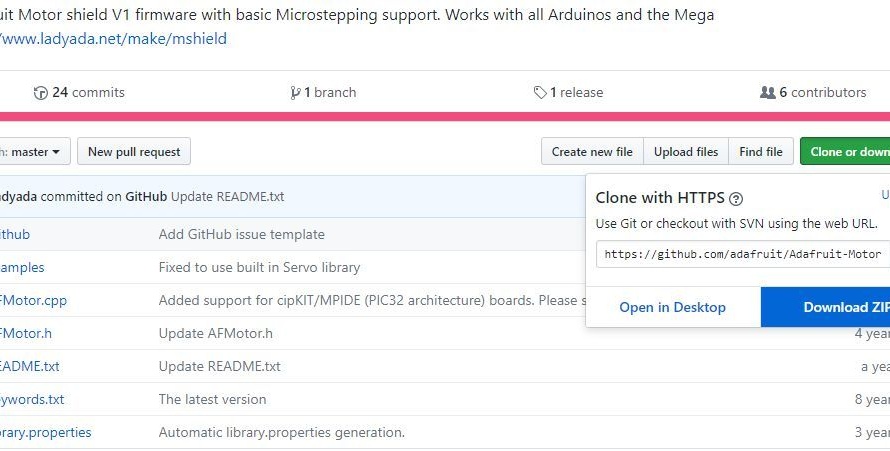
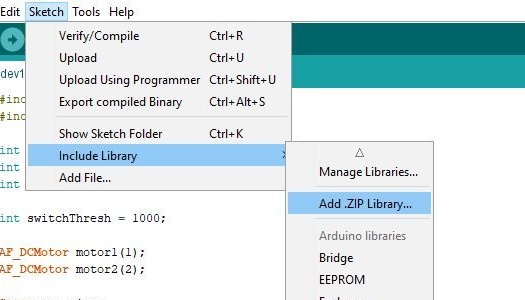
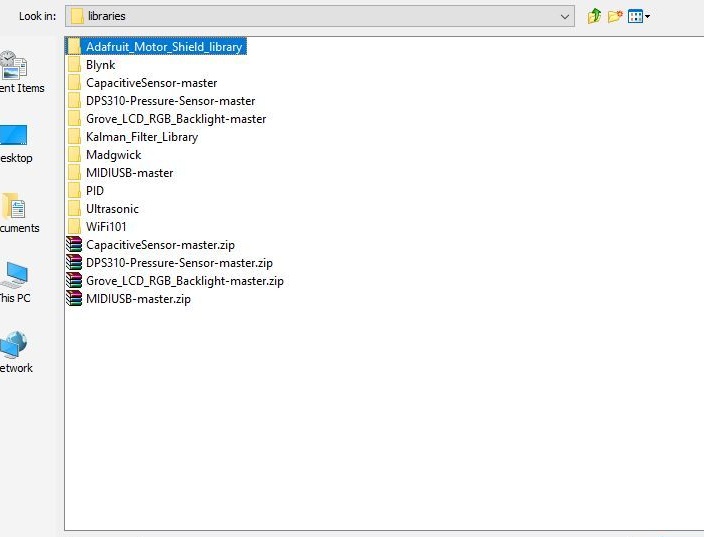
Ladda sedan ner koden. Vid laddning bör batteriet kopplas bort.
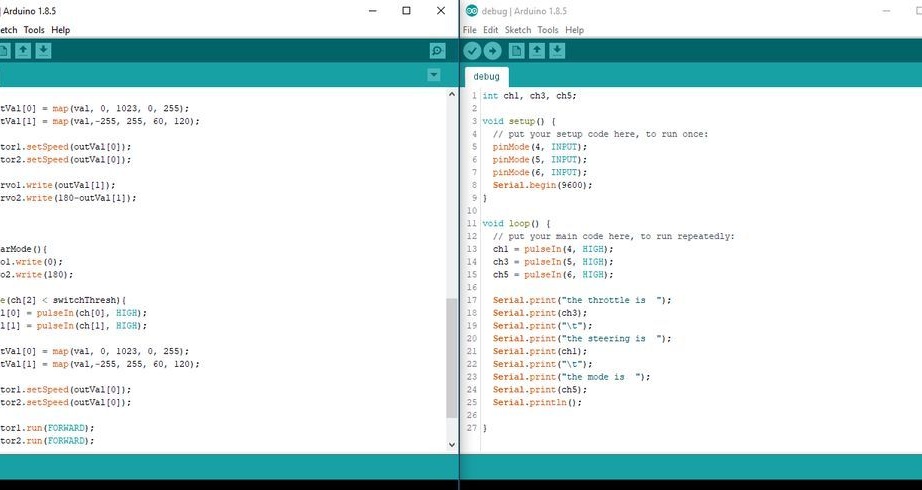
Ladda ner koden nedan.
amphibious_rover_code.ino
Efter att koden laddats ner kontrollerar den driften av motorer och drivenheter.
Steg sexton: montering
Nu är det dags att montera terrängfordonet.
[center[/ center]
Installerar servon. Installerar växelmotorer.

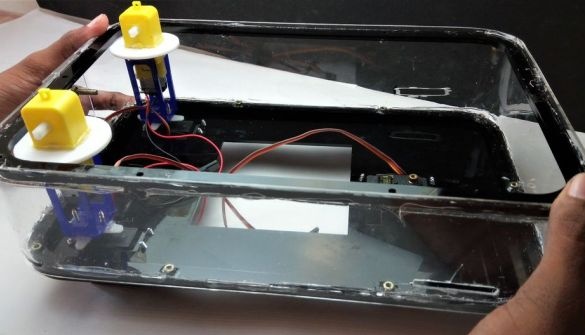
Fäst hjulen. Vrid båda kroppens halvor.






Allt är klart och nu kan du testa.