

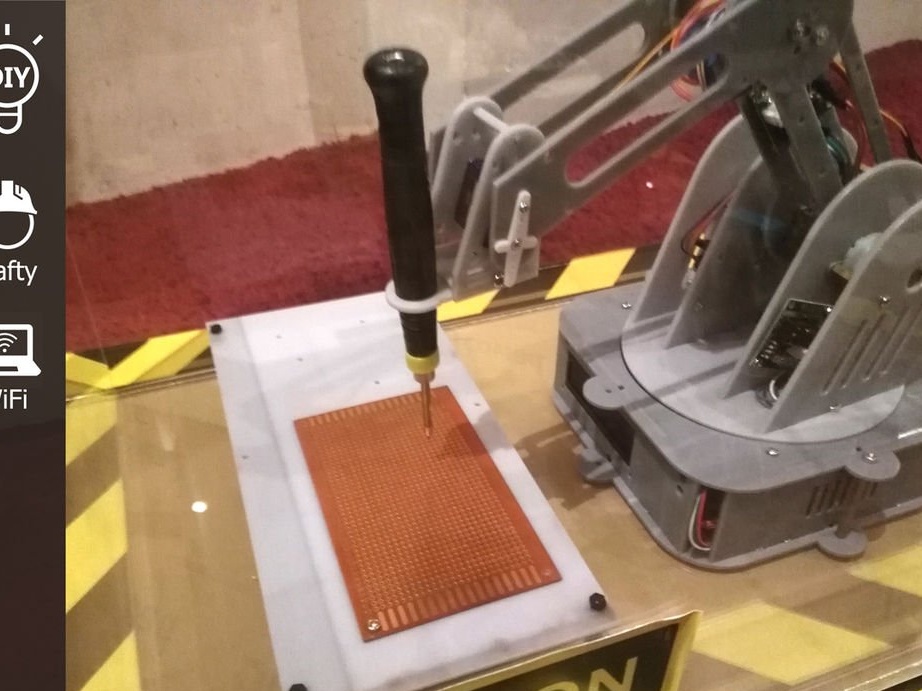

Tyvärr kommer detta material inte att dra på en fullfjädrad artikel, därför beslutade jag att placera det i "tips", kanske någon kan behöva materialet. Artikeln berättar hur man lodde elektronisk komponenter på ett kretskort med hjälp av en automatiserad manipulatorarm.
Idén med projektet kom till en master av en slump när han studerade olika möjligheter för robotmanipulatörer och sedan upptäckte att det finns flera som täcker området för automatisk svetsning och lödning av en robotmanipulator.
Verktyg och material:
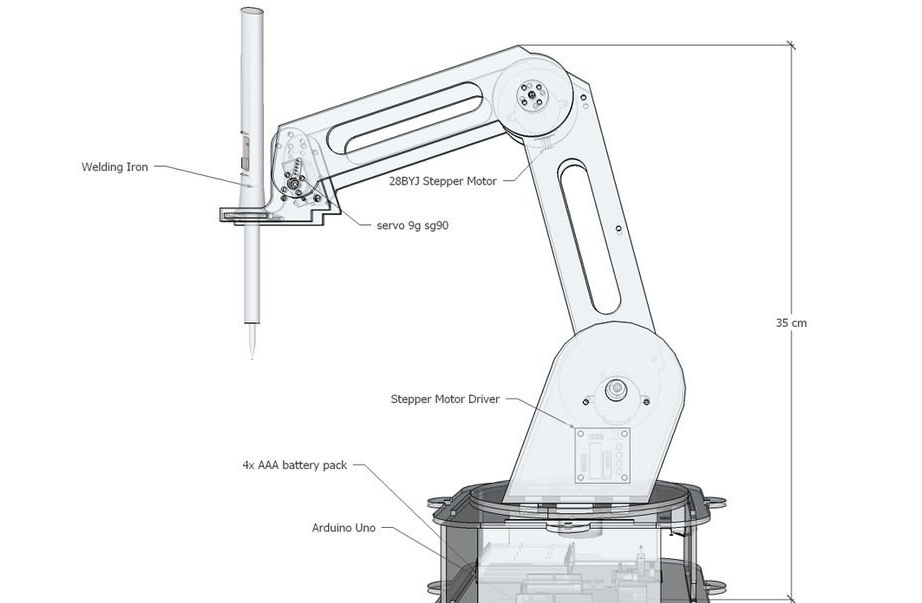
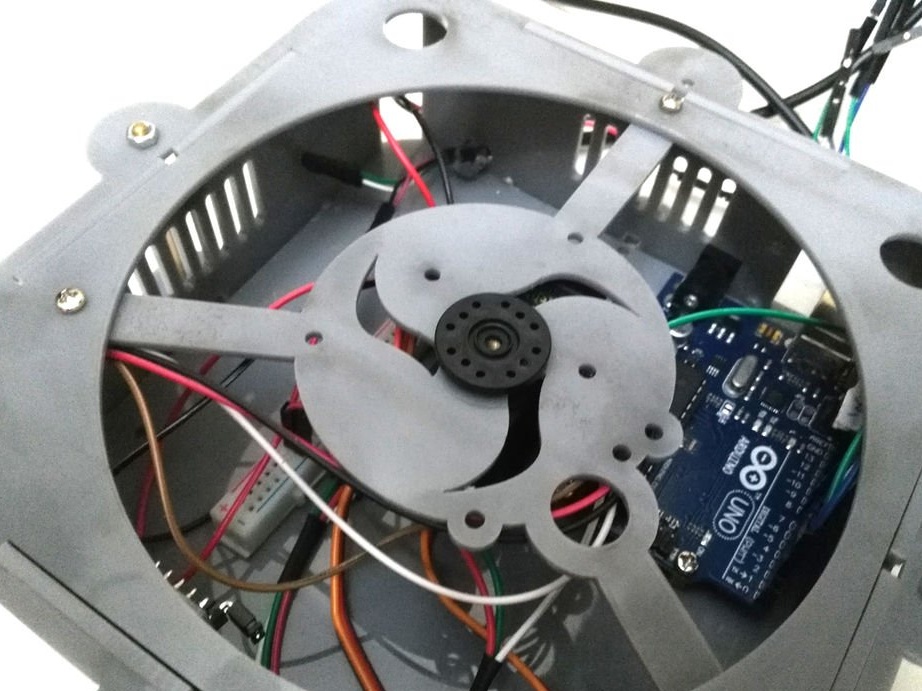
-Stegmotor 28BYJ-48 med drivmodul ULN2003;
- Arduino Uno R3;
Servomotor MG-90S;
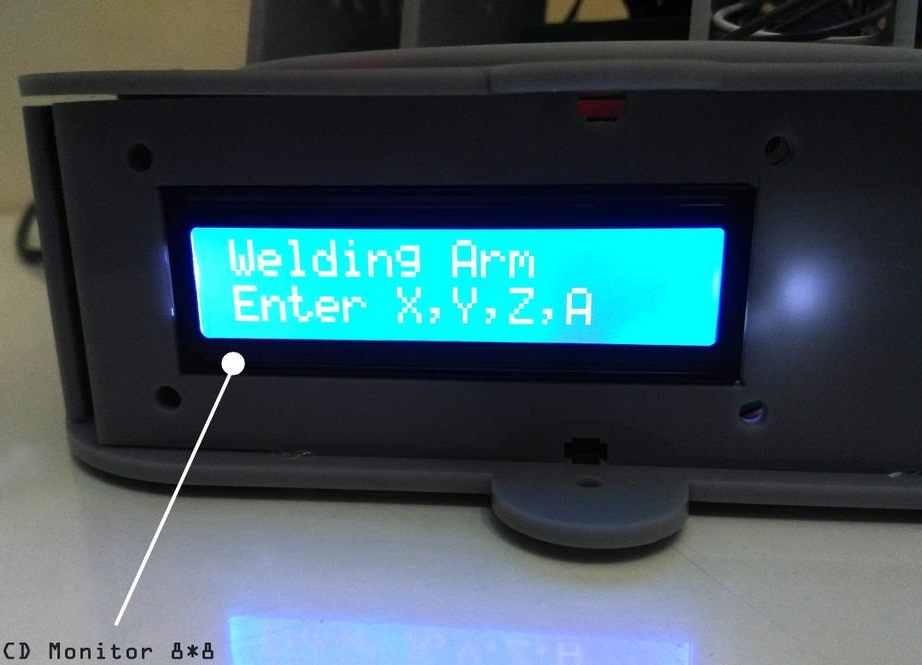
- LCD 1602;
-Maketnaya board;
- anslutande ledningar;
- Sänkningskonverterare;
-Servox SC-1252MG $ Servo Drive
-Krepezh;










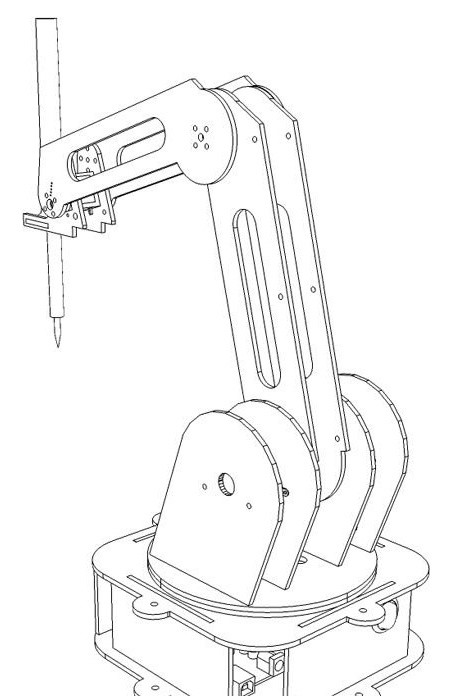
Guiden utvecklade projektet först. En del av detaljerna skars ut på en CNC-maskin med en laser.
Efter montering av alla delar uppstod ett antal problem:
1. Spakarna var för tunga för att små stegmotorer skulle kunna styra.
2. Sedan modellen var gjord av plast, friktionen för den roterande basen var hög och rörelserna var inte jämna.
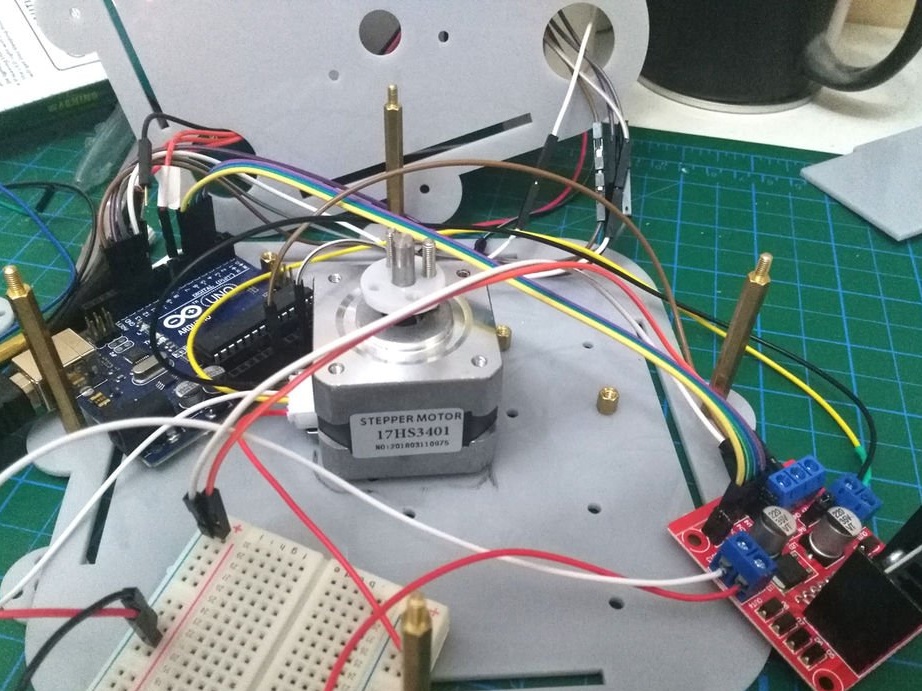
Den första lösningen var att köpa en större stegmotor som kan motstå vikt och friktion, och befälhavaren gjorde om basen för att installera en större stegmotor.
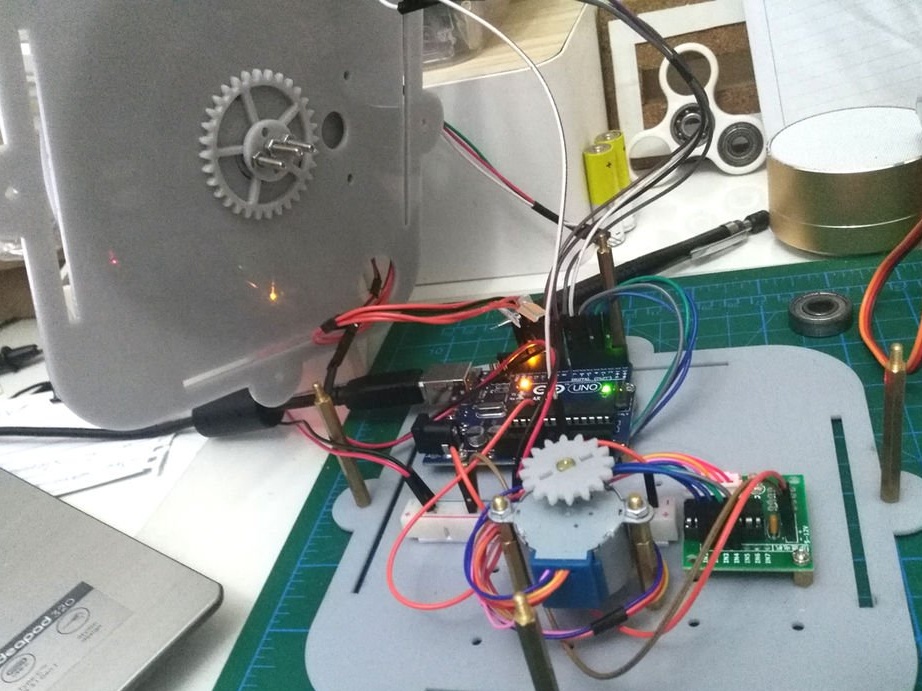
Men problemet försvann inte, och då ändrade befälhavaren helt grundkonstruktionen och installerade en servomotor med växellåda och metallväxlar.
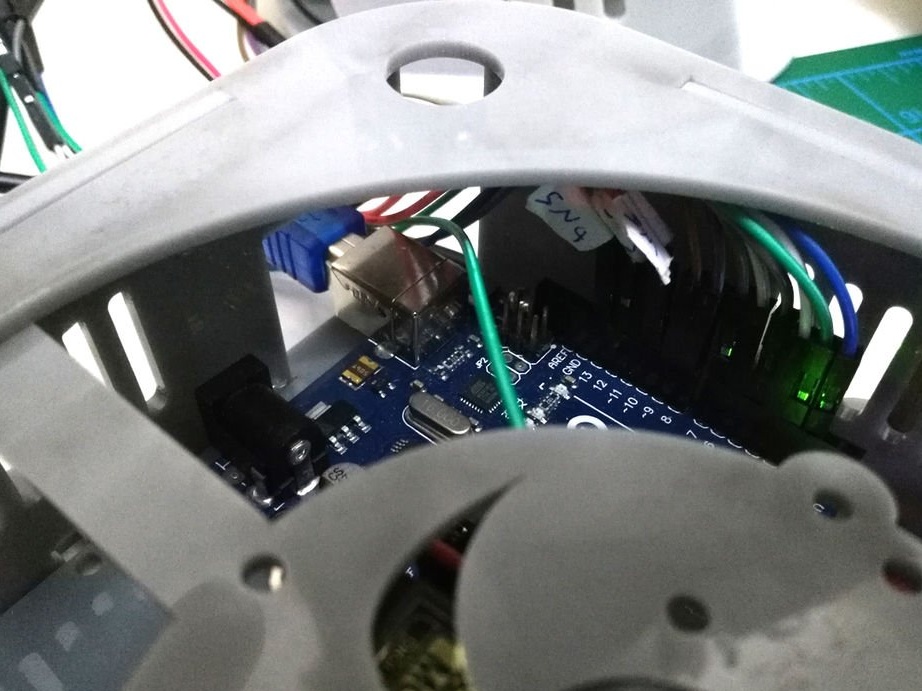
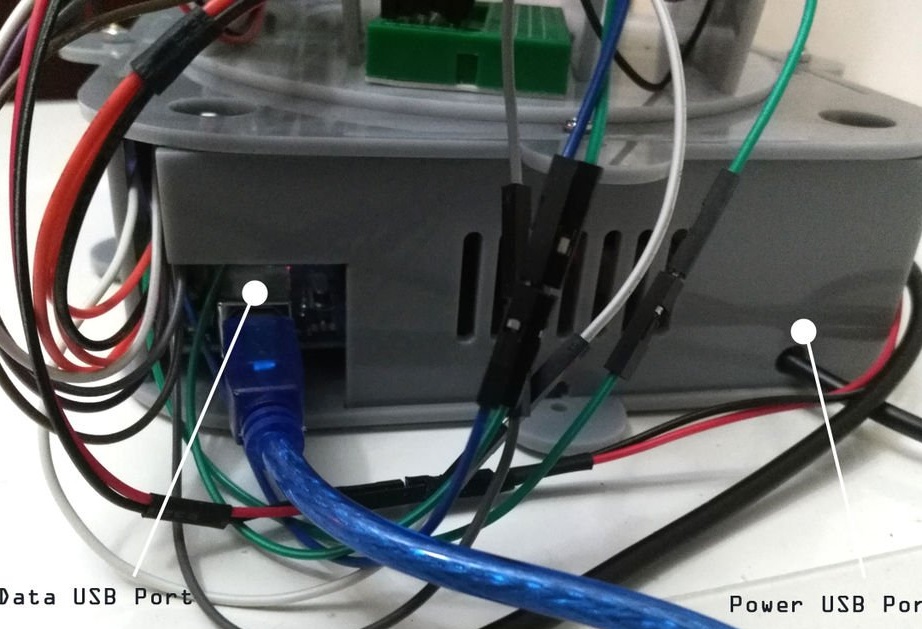
3. Spänningen.
Arduino kan ta emot ström antingen från DC-strömkontakten (7-12 V), USB-kontakten (5 V) eller från VIN-stiftet på kortet (7-12 V). Spänningsförsörjningen genom 5 V- eller 3,3 V-kontakterna går förbi regulatorn, och befälhavaren bestämde sig för att köpa en speciell USB-kabel som stöder 5 V från en PC eller någon strömkälla.

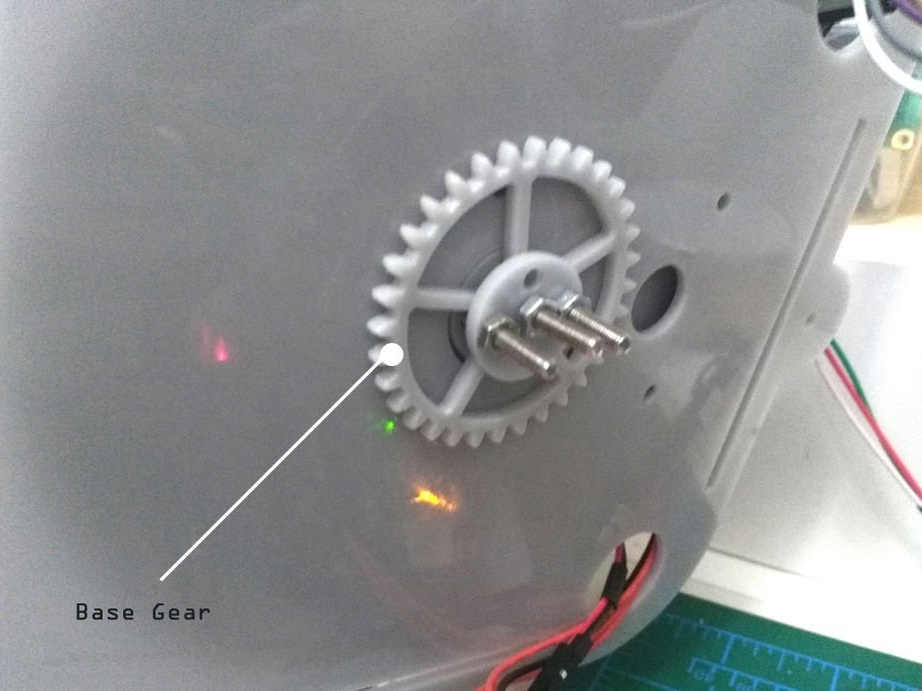

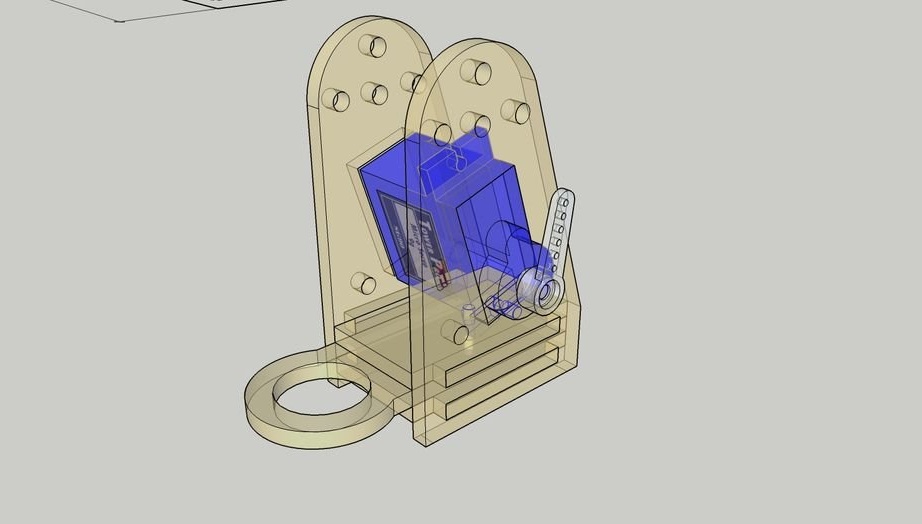
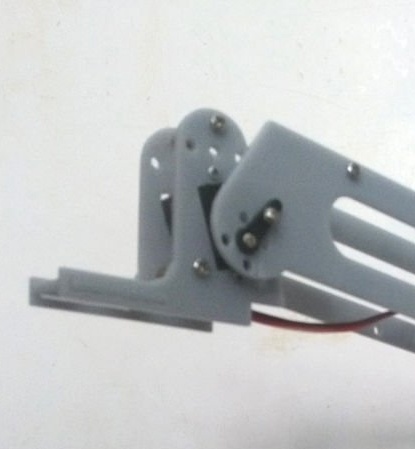
Efter några modifieringar ändrade befälhavaren modellens utformning, minskade storleken på konsolerna och gjorde ett lämpligt hål för servomotorväxeln, som visas på bilden.

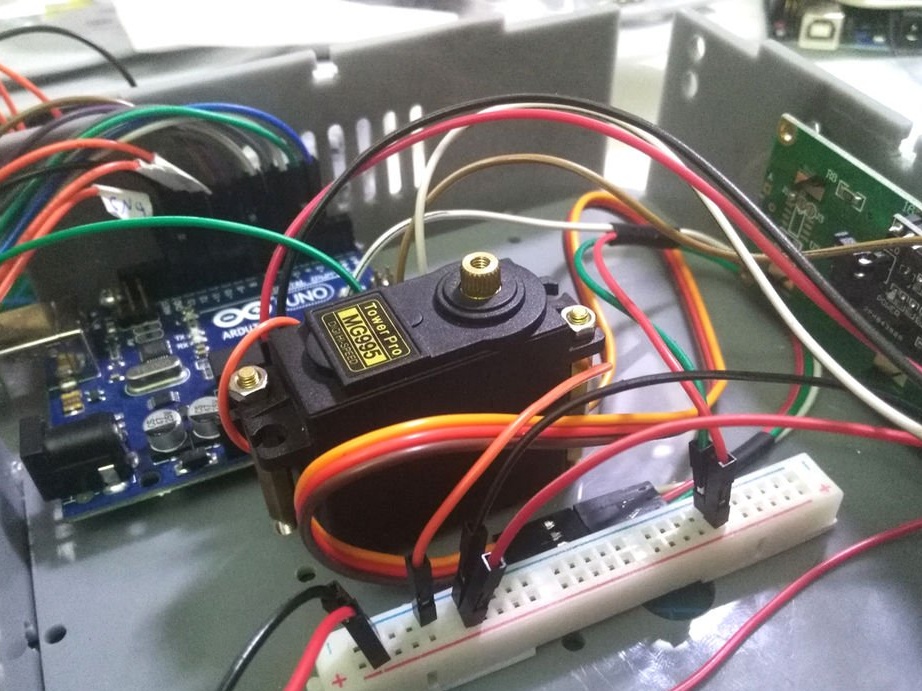
För att hålla lödkolven gjorde mästaren en speciell fäste.För korrekt drift behövs en servomotor med en 180-graders rotationsparameter.

Koden kan laddas ner nedan.

ProjectCodeFirst.ino
De viktigaste punkterna för att tillverka enheten kan ses i videon.
Naturligtvis räcker det inte med information, det finns inget diagram, det finns inga filer för CNC, det finns inga exempel på enhetens drift, men det finns en bra idé och kanske en intresserad guide, på grundval av denna idé kommer han att göra en fullt fungerande enhet.