
Jag har nyligen byggt dussintals robotar, mestadels inspirerade av BEAM-robotikens underverk. Om du inte känner till den här tekniken är BEAM en speciell metod för att konstruera robotar med betoning B - biologi, E - elektronik (elektronik), A-estetik (estetik) och M - mekanik (mekanik). Detta är förkortningen BEAM. Det som skiljer denna teknik från andra tillvägagångssätt är användningen av endast strålningsenergi för näring (främst solenergi), bortskaffande av olika material (återanvändning) och minimalism. Även om jag har antagit dessa principer, mina egna robotar var inte riktigt i BEAM-andan (de drivs av ett batteri).
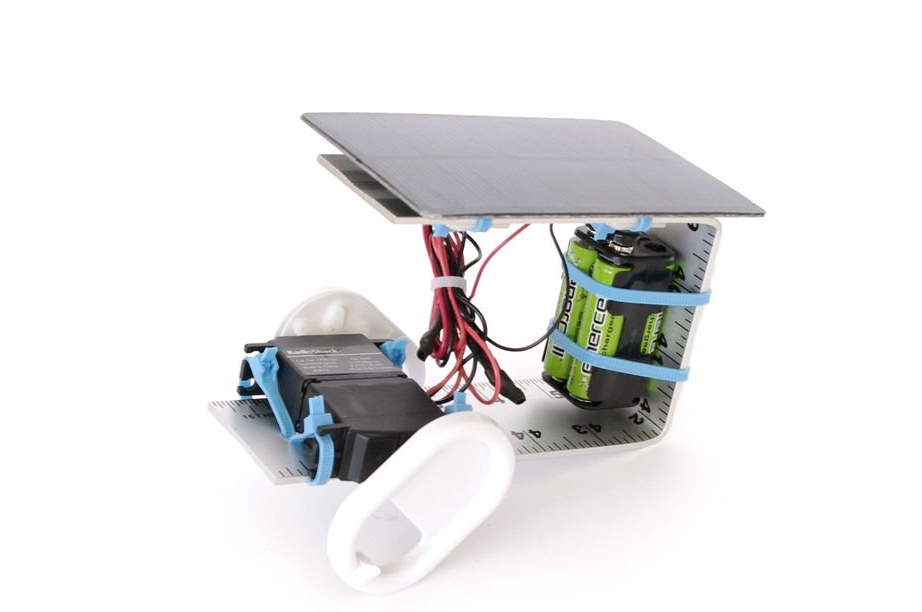
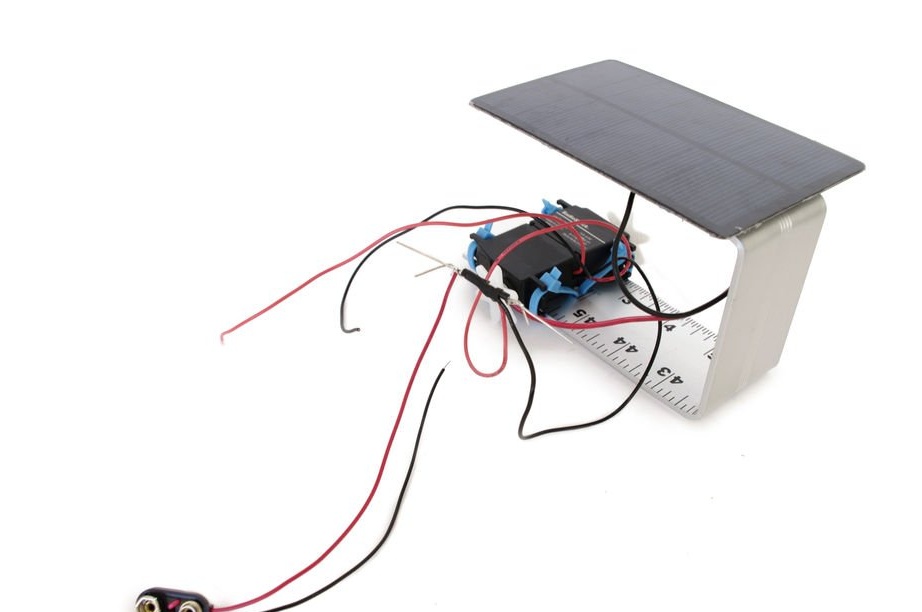
Eftersom BEAM-robotik inspirerade mig på allvar ville jag skapa en solenergidriven robot. Men istället för att bara skapa en BEAM-robot, bestämde jag mig för att integrera en solpanel i roboten i min vanliga stil. Istället för att drivas helt med solen bestämde jag mig för att bygga in uppladdningsbara batterier. Det vill säga min robot kan drivas antingen från ett batteri eller från en solpanel, beroende på vilken kraftkälla som för närvarande är mer kraftfull. Solpanelen laddar också batterierna när solljuset träffar det. Detta gör att roboten kan röra sig både i ljuset och i skuggan.
Jag tror att denna metod lyckas kombinerar två stilar, och detta är ett intressant experiment i konstruktion av robotar.
Steg 1: Material
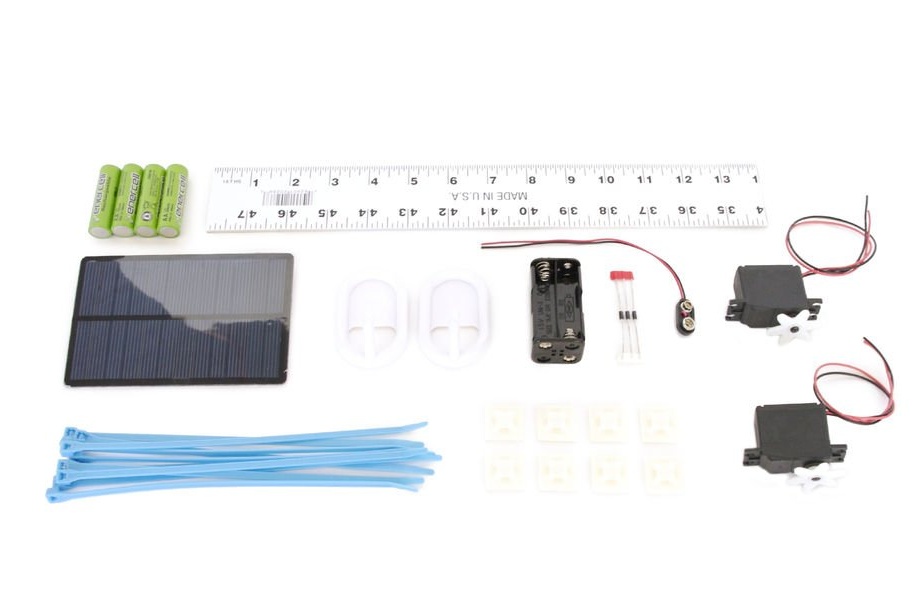
Du behöver:
(x1) Solpanel
(x2) Standard servomotorer
(x3) Schottky Diodes 1N5817 - NTE578 ekvivalent
(x1) 9V batteri
(x8) Uppladdningsbara AA-batterier
(x1) 8 x AA-batteripaket
(x12) Bas för klämmor
(x1) Linjal (30 - 50 cm)
(x2) Väggmonterade limkrokar
(x1) Plastklämmor
(x1) Värmekrympslang
Steg 2: Ändra Servo

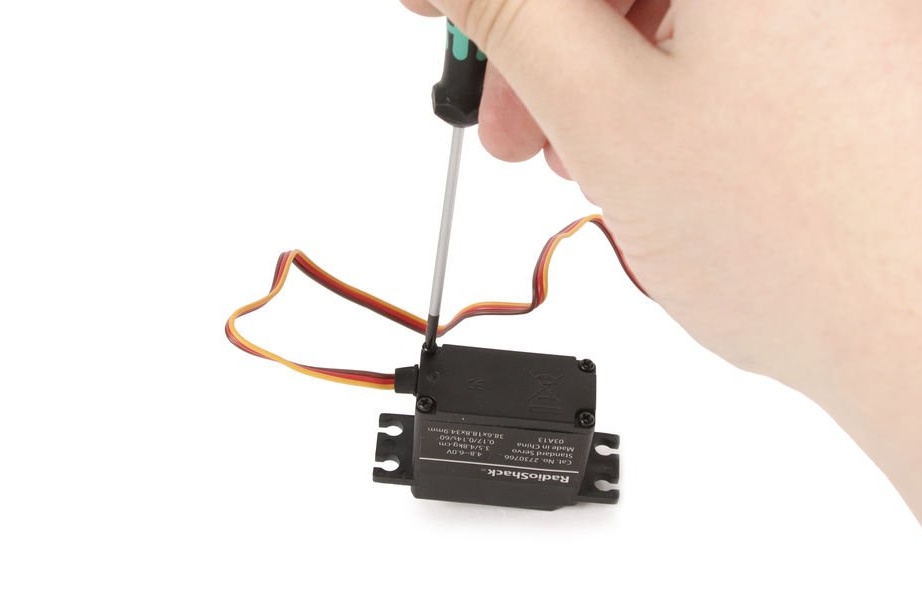
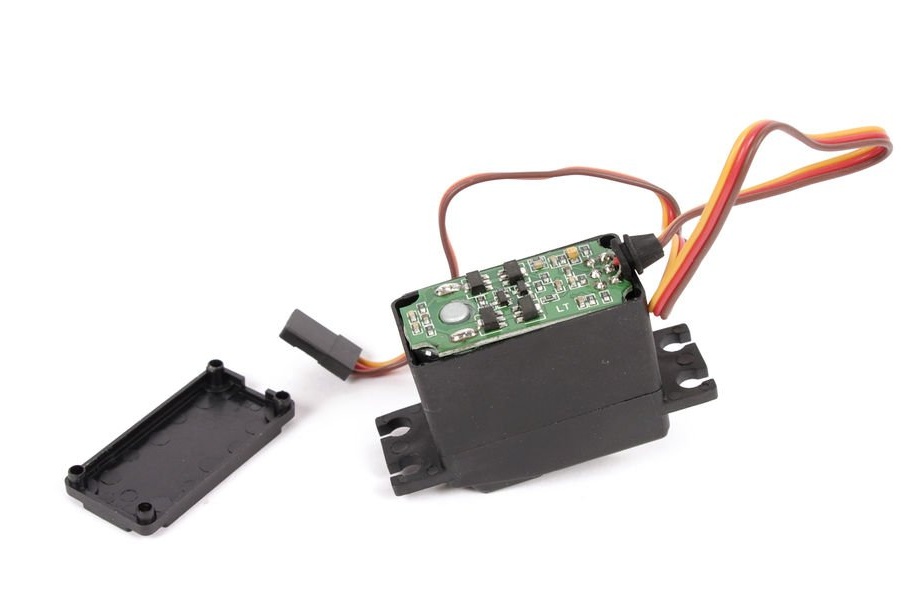
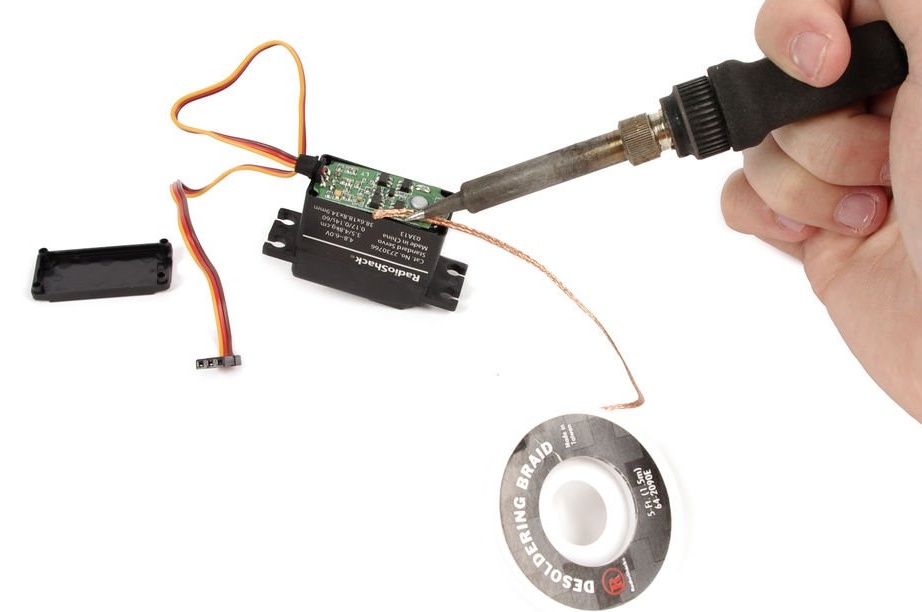
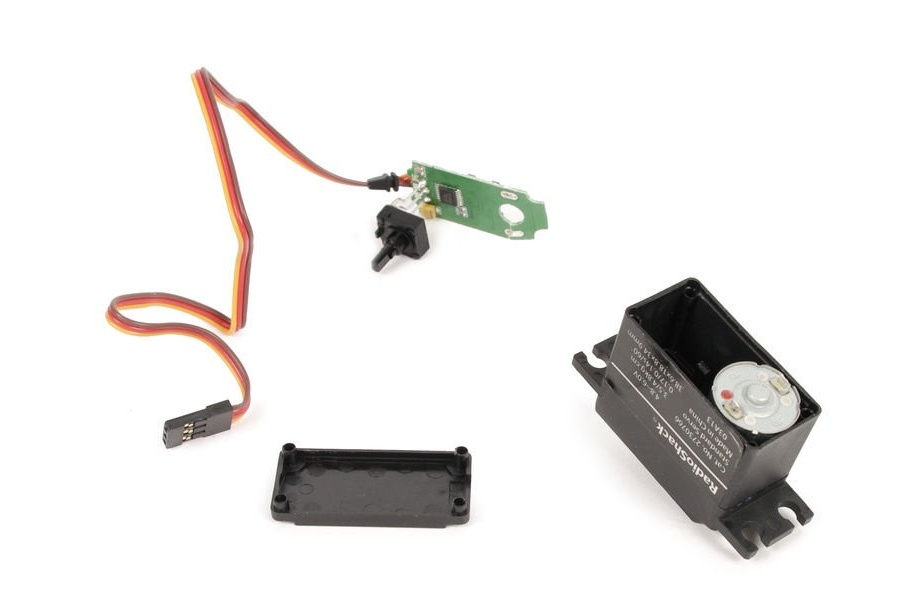




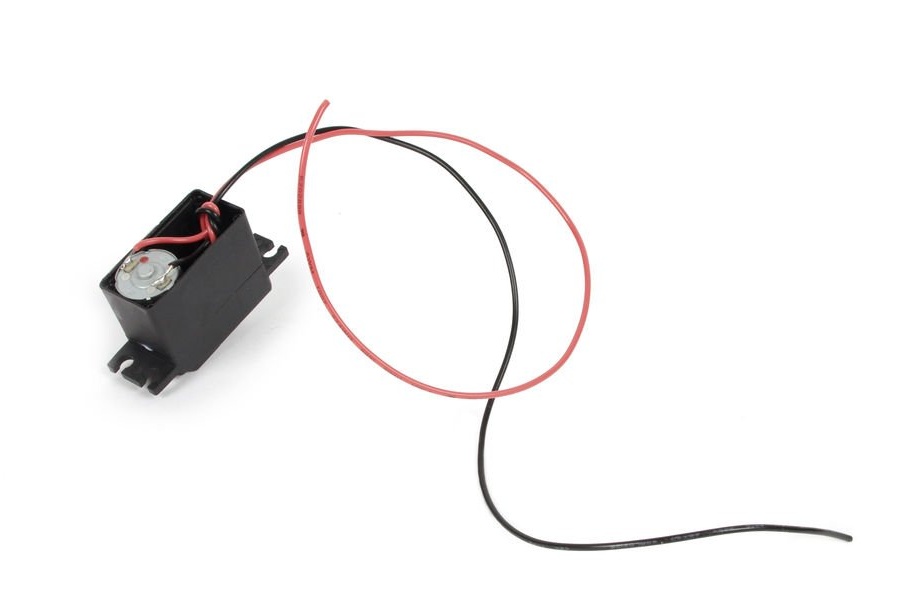
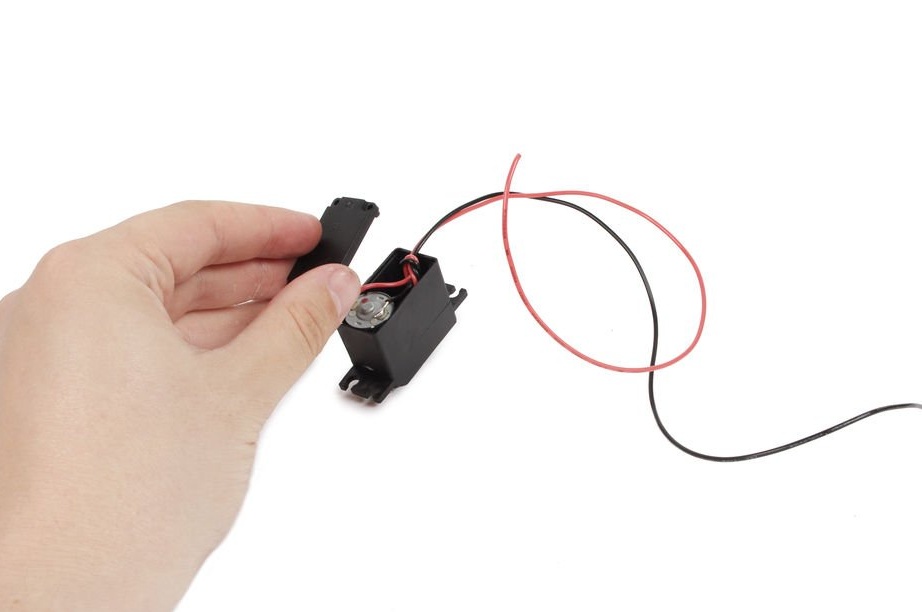

Öppna servohuset genom att skruva loss 4 skruvar på bottenpanelen. Packa upp kortet inuti och anslut de röda och svarta kablarna till varje terminal på enheten.
Öppna växeln och hitta växeln med ett litet plastlock som förhindrar kontinuerlig rotation. Klipp av locket från växeln.
Steg 3: Borra
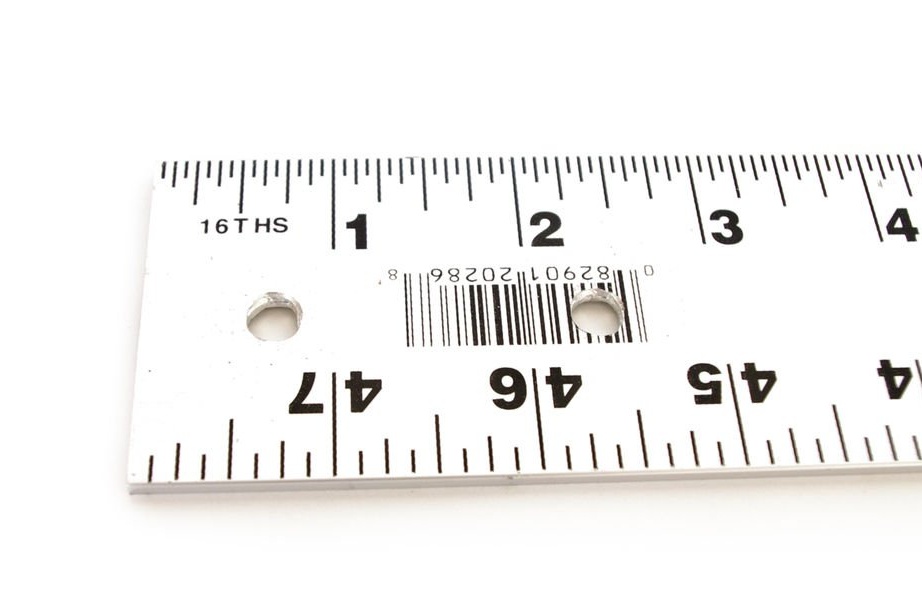


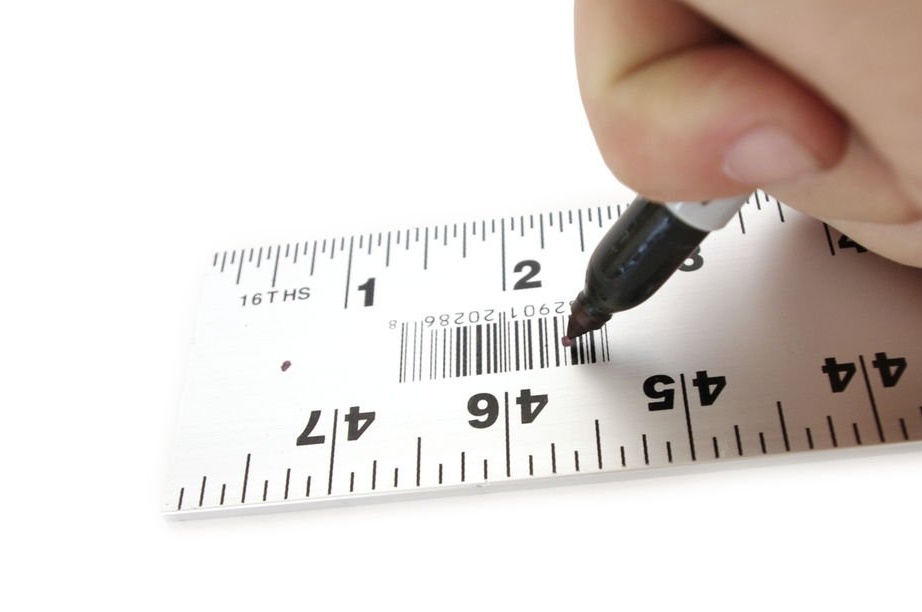
Borra ett hål på 6,3 mm i mitten av linjalen, cirka 15 mm från den korta kanten. Borra ett andra hål cirka 60 mm från samma kant.
Steg 4: Böj

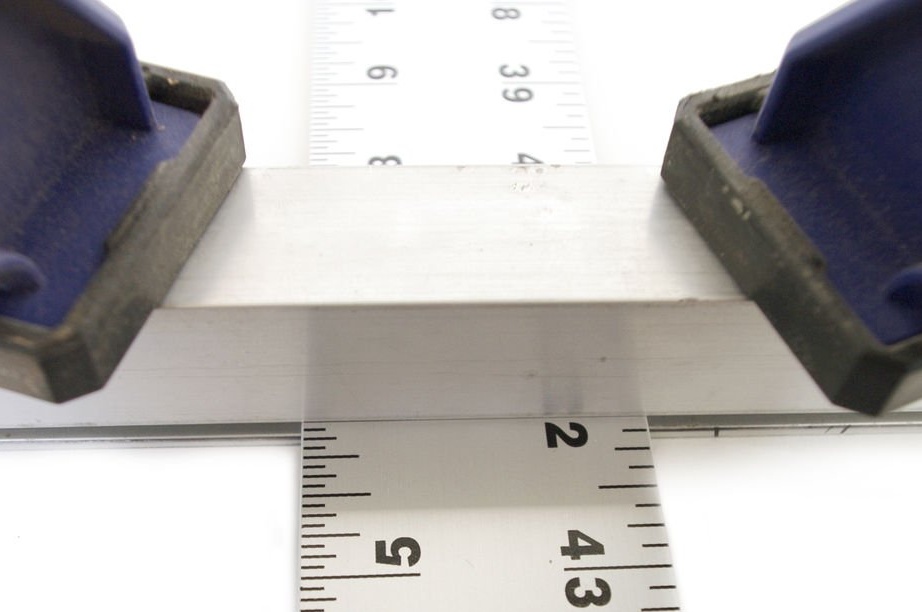
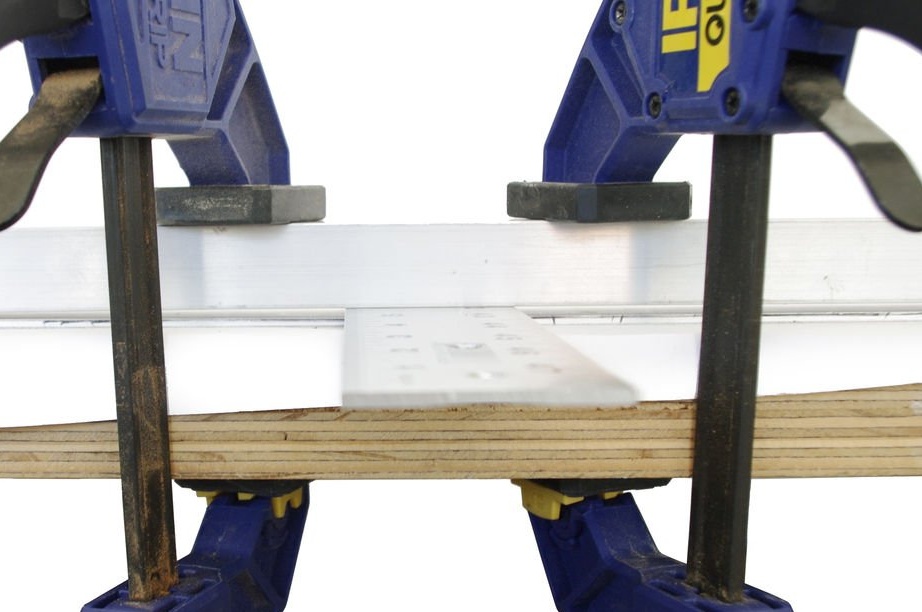

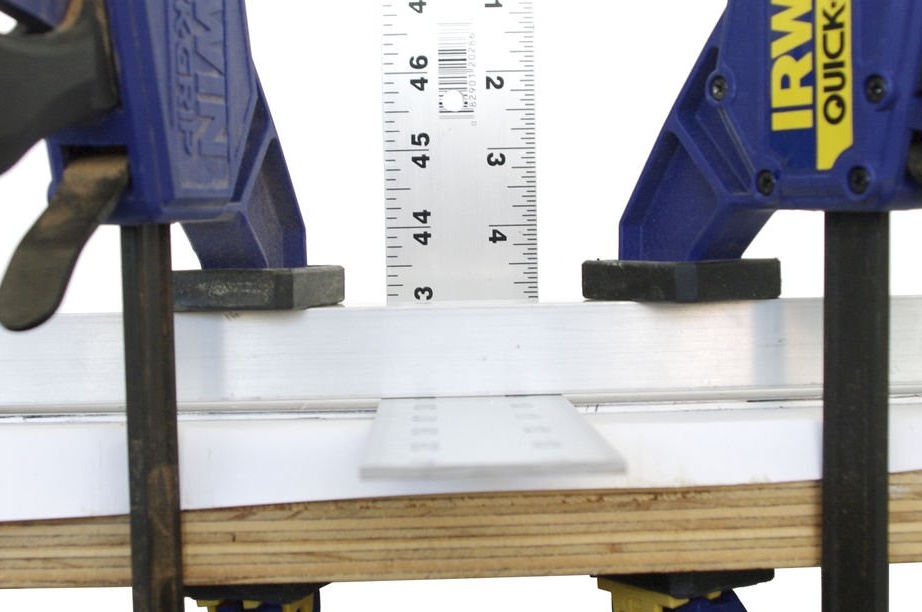

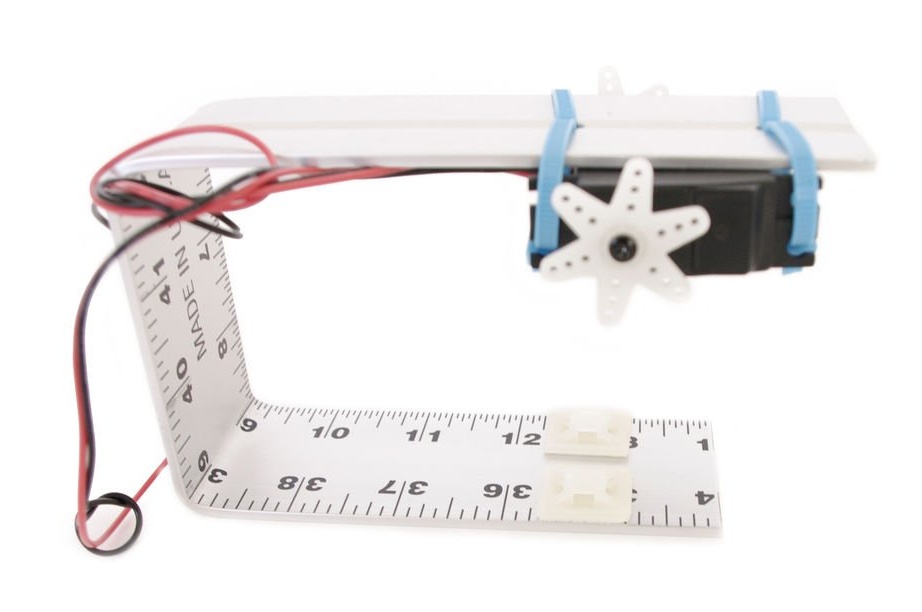
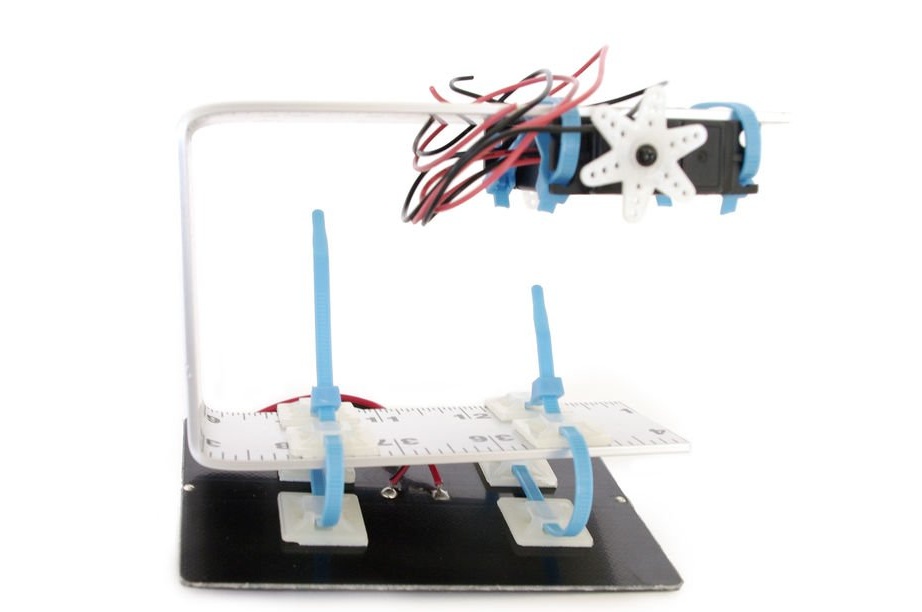
Böj linjalen med en skruvstång eller två metallplattor klämda fast på bordets kant i en vinkel på 90 grader på ett avstånd av 15 cm från kanten där hålen borrades.
Böj samma i en 90-graders vinkel 15 cm från den andra kanten. Du får en siffra i form av bokstaven P.
Steg 5: Anslutning
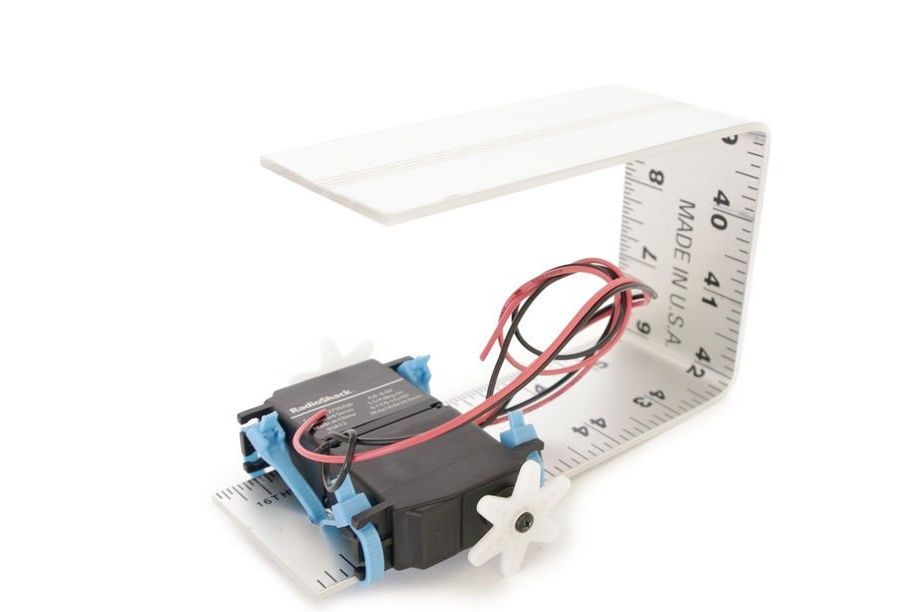

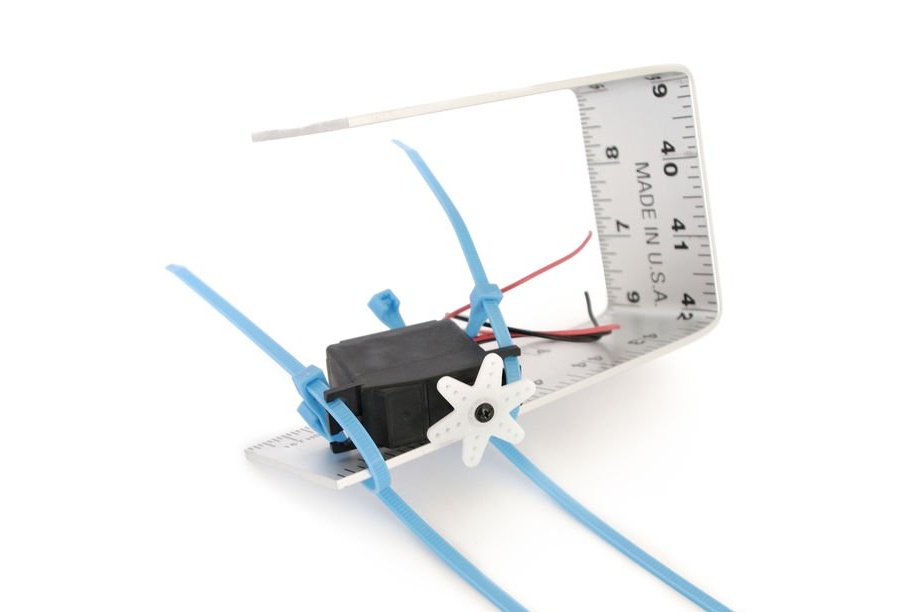
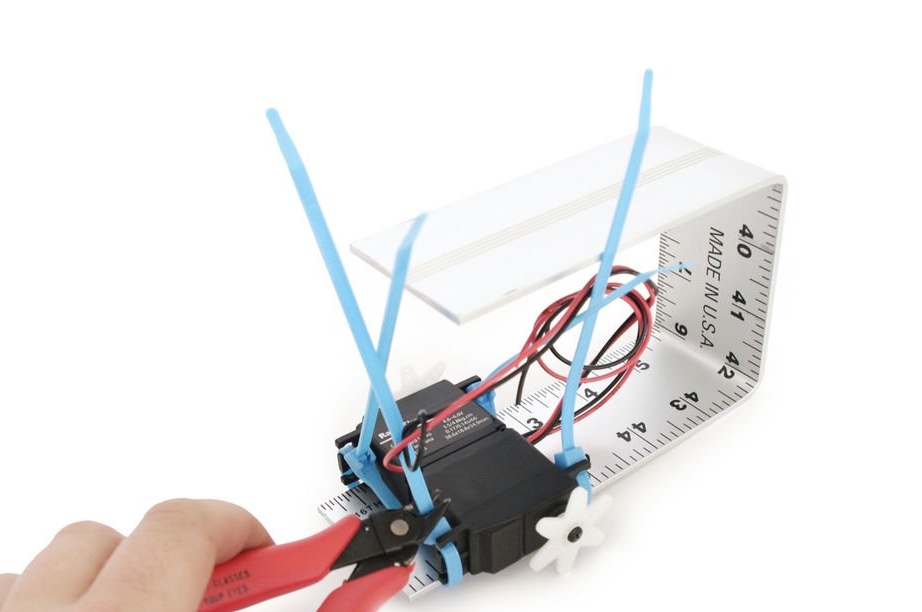
Det är nödvändigt att fixera servon på linjen med plastklämmor, genom borrade hål. Servomotorer måste sitta med ryggen mot varandra.
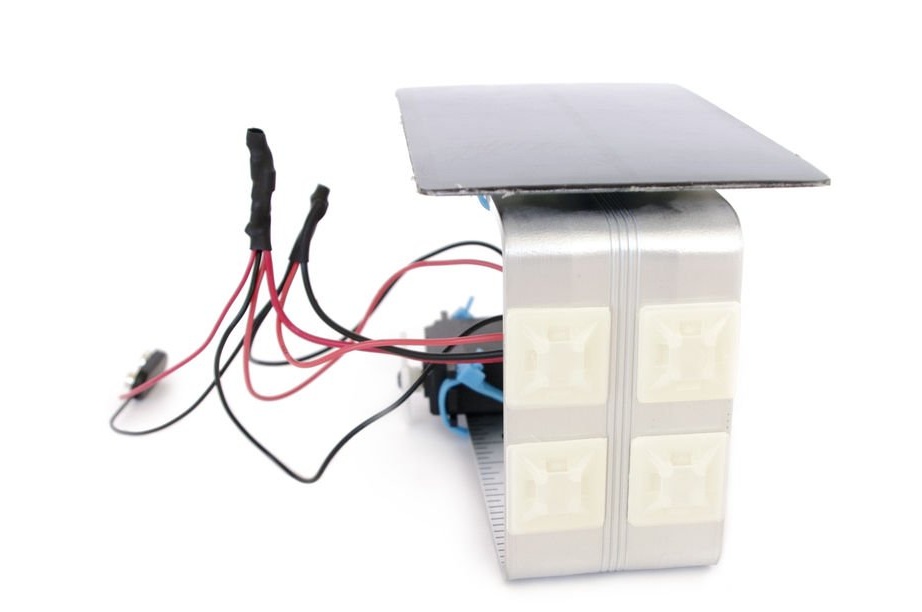
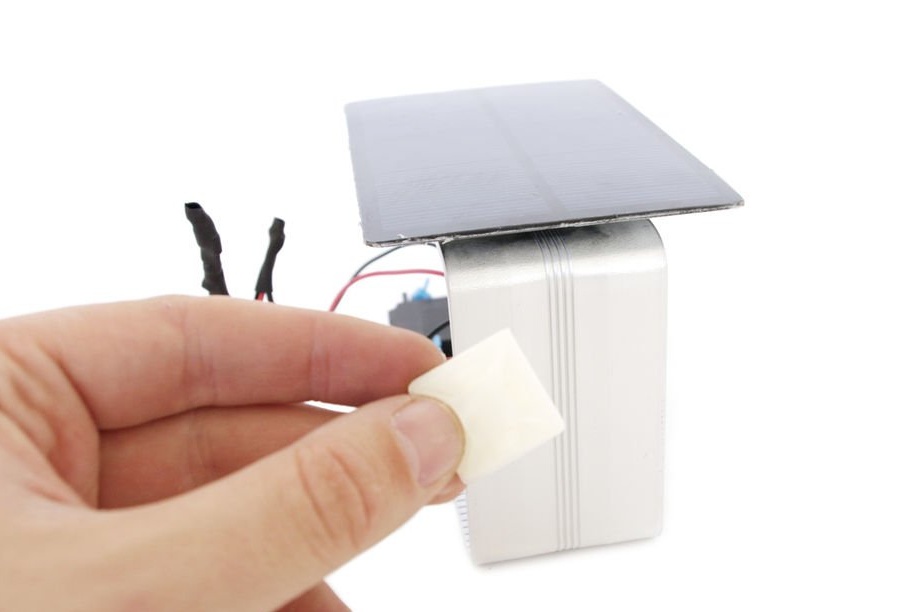
Steg 6: Bas för klämmor
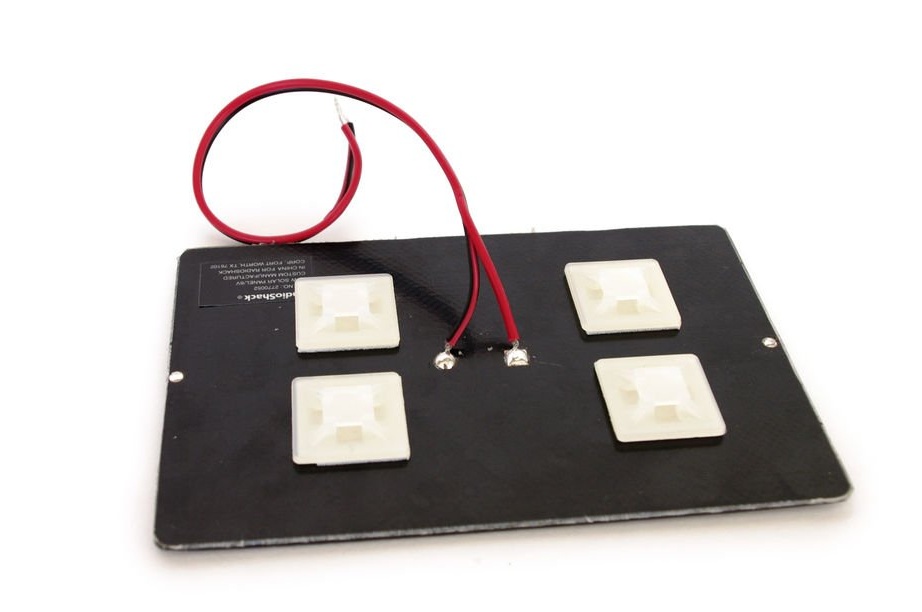

Placera två par klämbaser bredvid varandra på solpanelens baksida. Det är viktigt att kanalerna för varje par är på samma linje.
Steg 7: Fler skäl
Fäst ytterligare två baser på insidan av U-stången, på sidan mittemot servos.
Steg 8: Anslutning
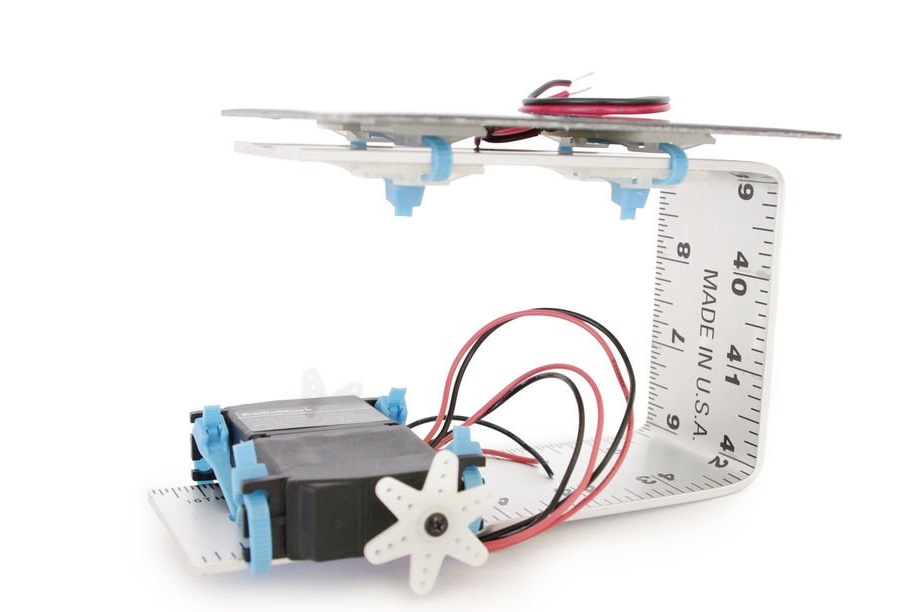
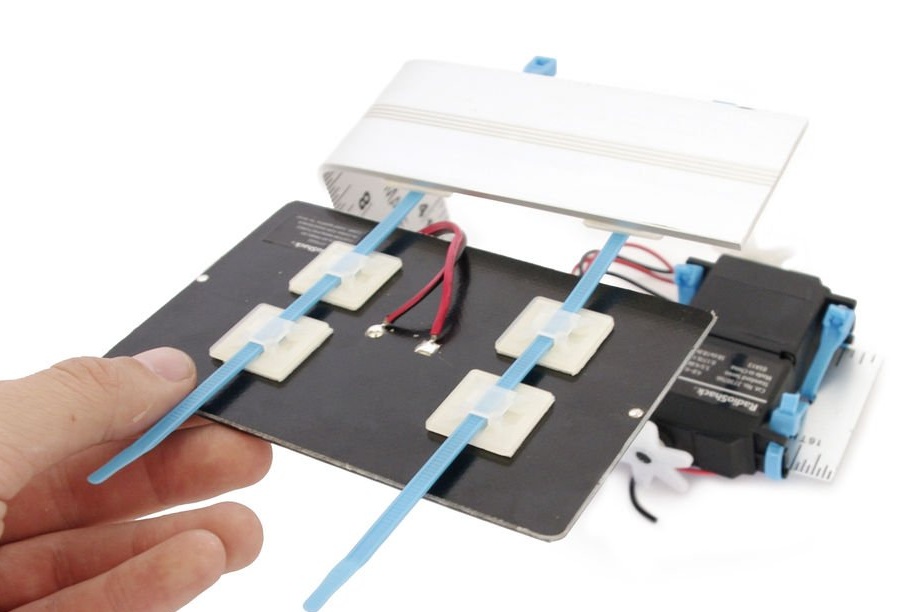
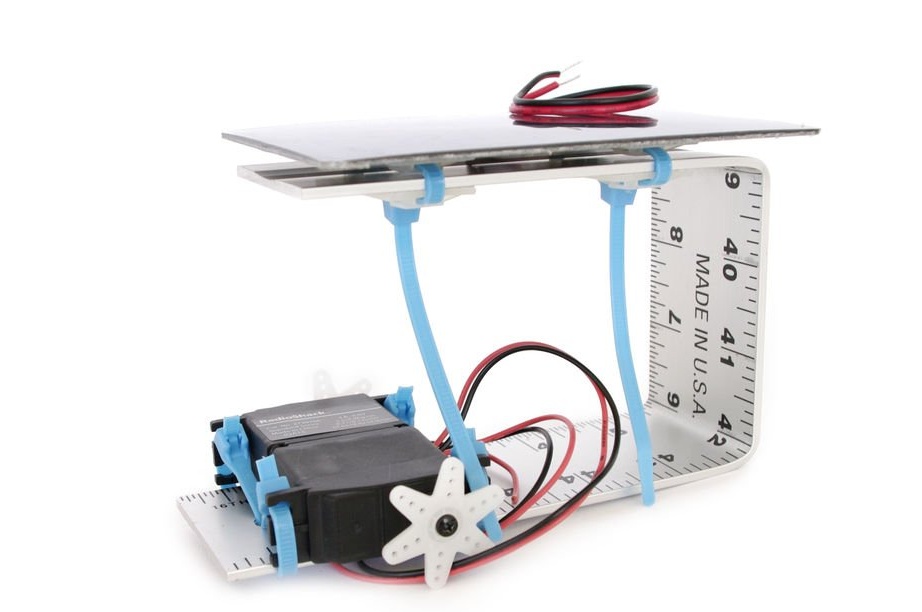
Fäst solpanelen med klämmor genom fasta baser.
Steg 9: Sätt i batterierna


Sätt i batterierna i batteripaketet.
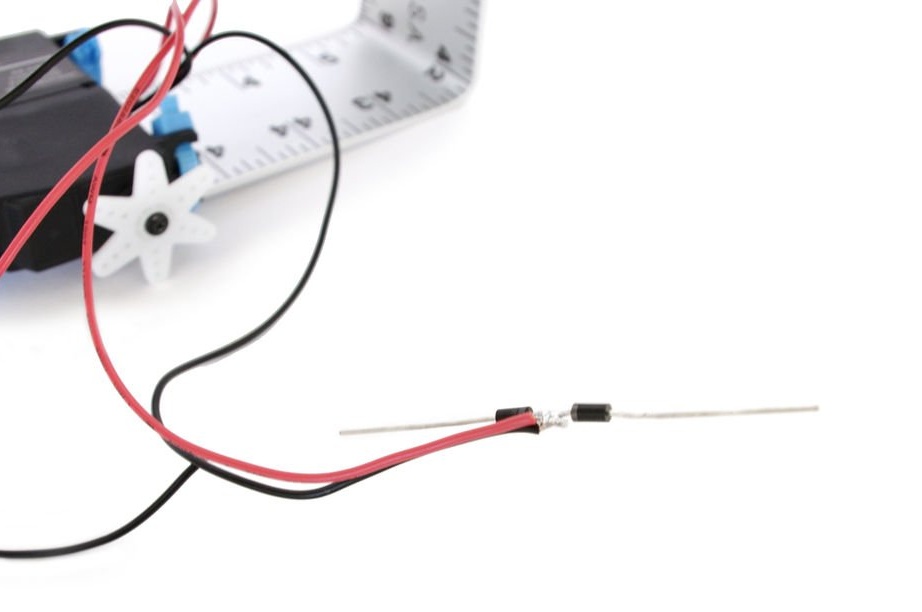
Steg 10: Dioder

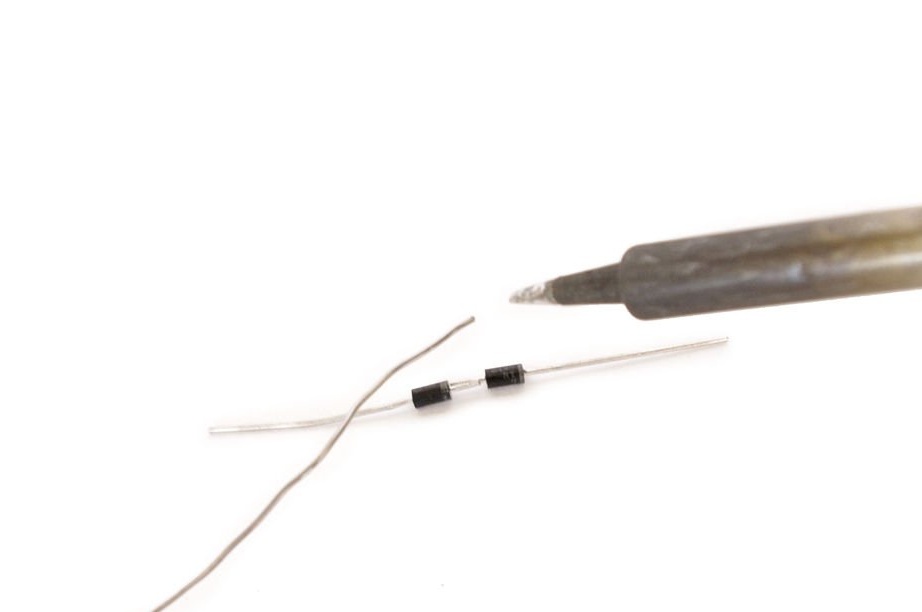
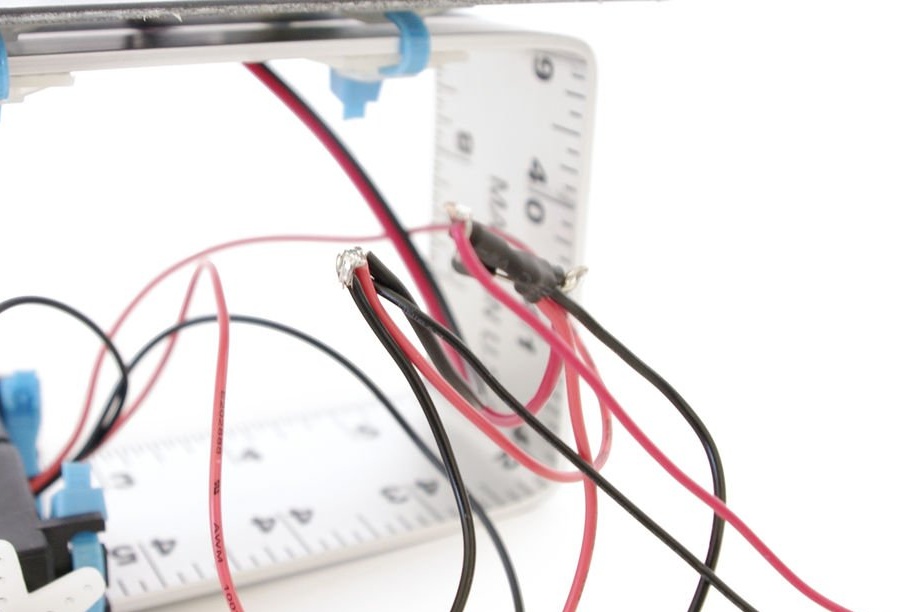
Löd de två dioderna tillsammans med katoderna (sidan av dioderna med spåret).
Steg 11: kedjeenhet
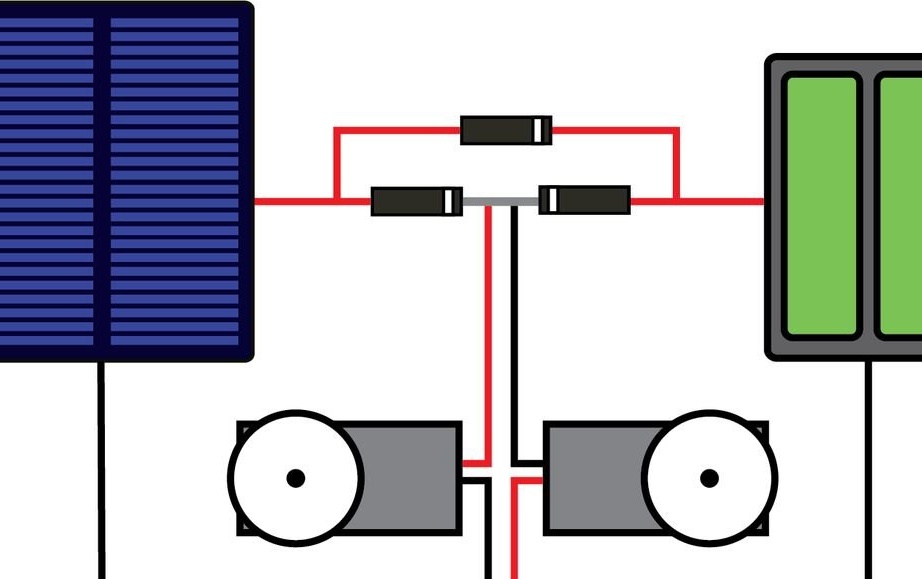
Kretsen för denna robot är baserad på David Cooks enkla soluppladdningskrets. Kretsen innehåller två Schottky-dioder anslutna med en katod-till-katod, en diod ansluten till en solpanel och en av batterierna. Denna konfiguration låter dig drivas av både batterier och solpanelen, beroende på förhållandena.
Eftersom batterierna är uppladdningsbara ansluts en tredje Schottky-diod direkt från solpanelen till batterifacket för att ladda batterierna från solen.
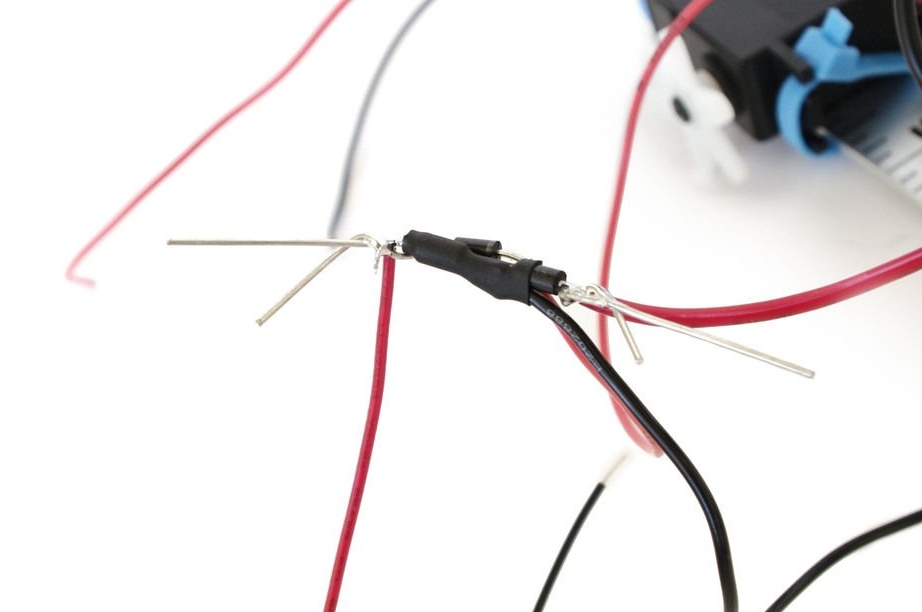
För att ansluta allt, anslut den röda ledningen från en av servon och den svarta tråden från den andra till mittpunkten för katodanslutningen.
Anslut sedan den röda ledningen från batteriterminalen till anoden på en av Schottky-dioderna. Anslut den röda ledningen från solpanelen till anoden på en annan diod.
Löd nu anoden för den tredje dioden till den röda tråden som är ansluten till solpanelen och katoden till den röda tråden från batteriterminalen.
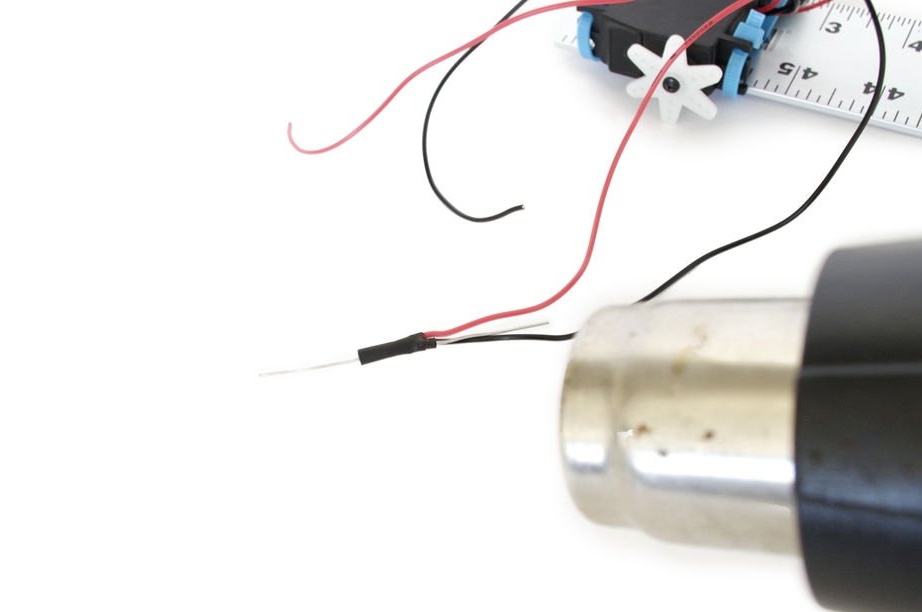
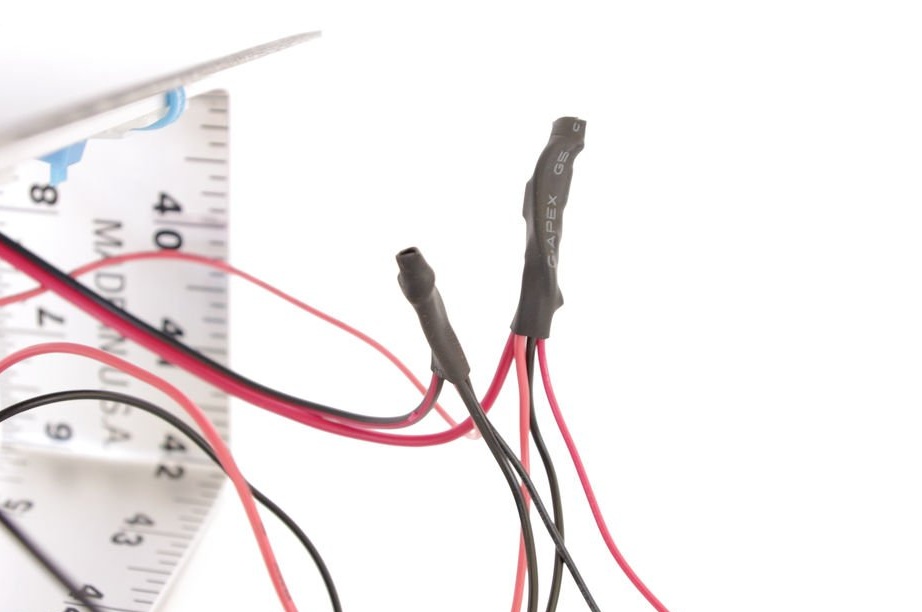
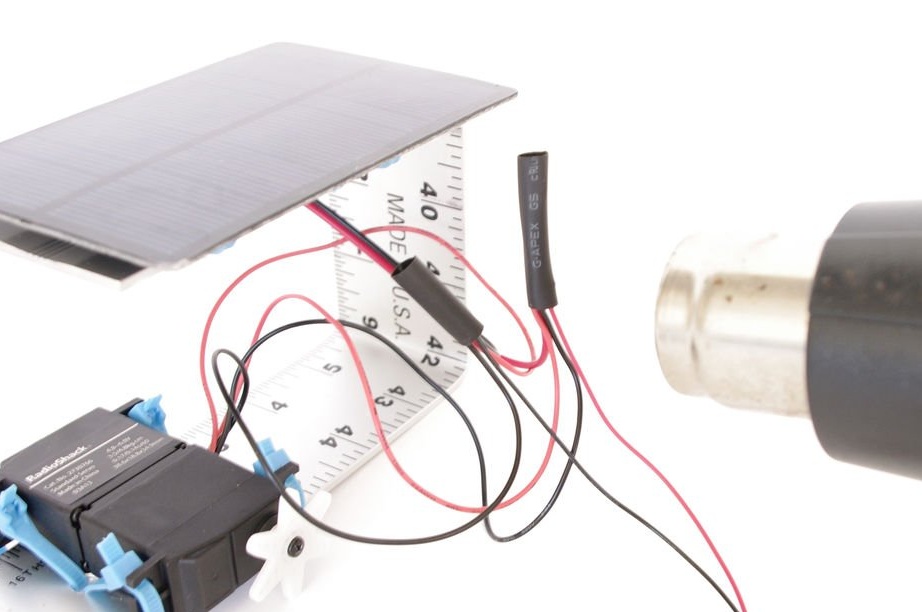
Dra in alla ledningar med värmekrympslang för att skydda kretsen mot kortslutningar.
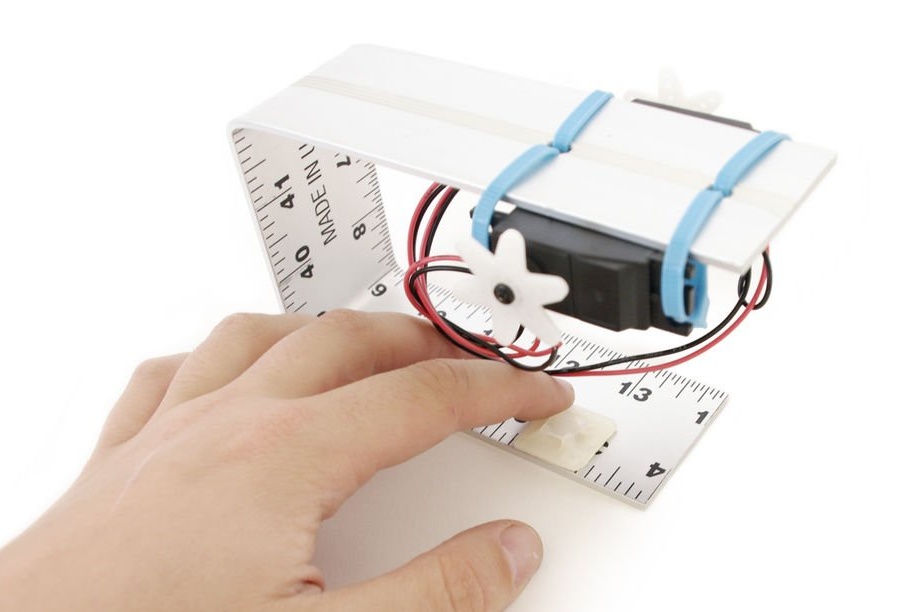
Steg 12: Några fler kablar
Löd samman alla svarta ledningar och de återstående fria röda ledningarna från servon.
Få två lödfogar; en för kraft och en för jordning. Förpacka båda dessa fogar med värmekrympslang eller elektrisk tejp.
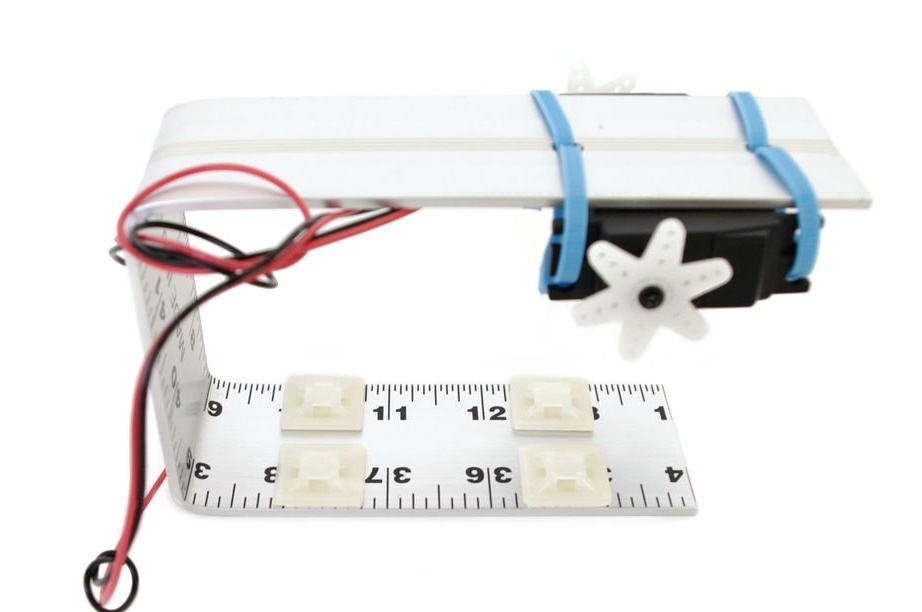
Steg 13: Och några fler skäl till klämmorna
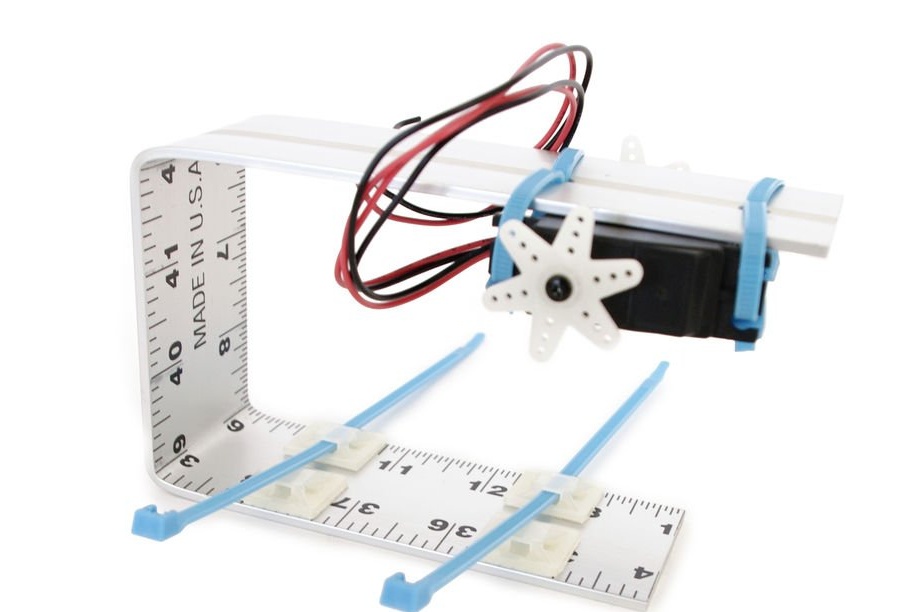
Fäst två par baser på undersidan av den U-formade böjda linjalen.
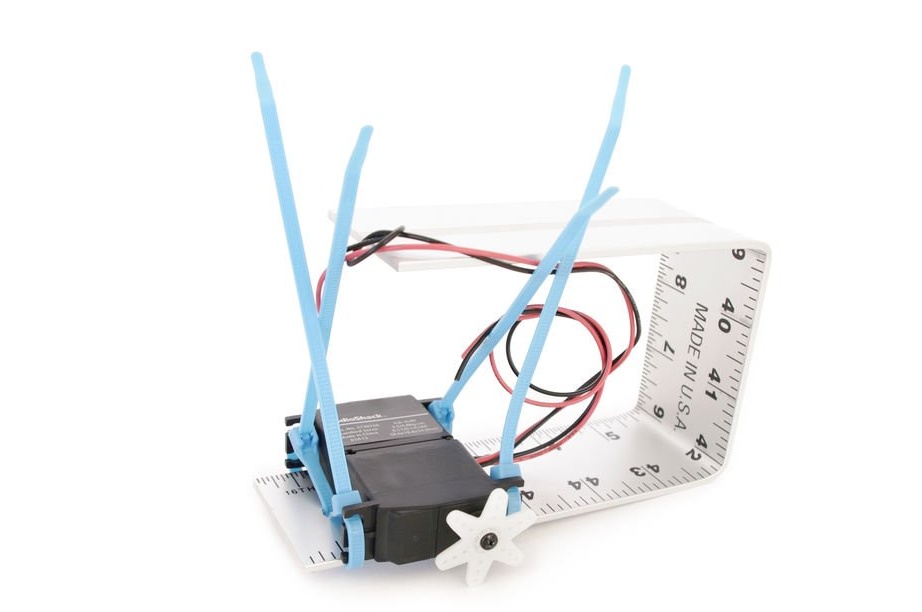
Steg 14: Säkra batterierna
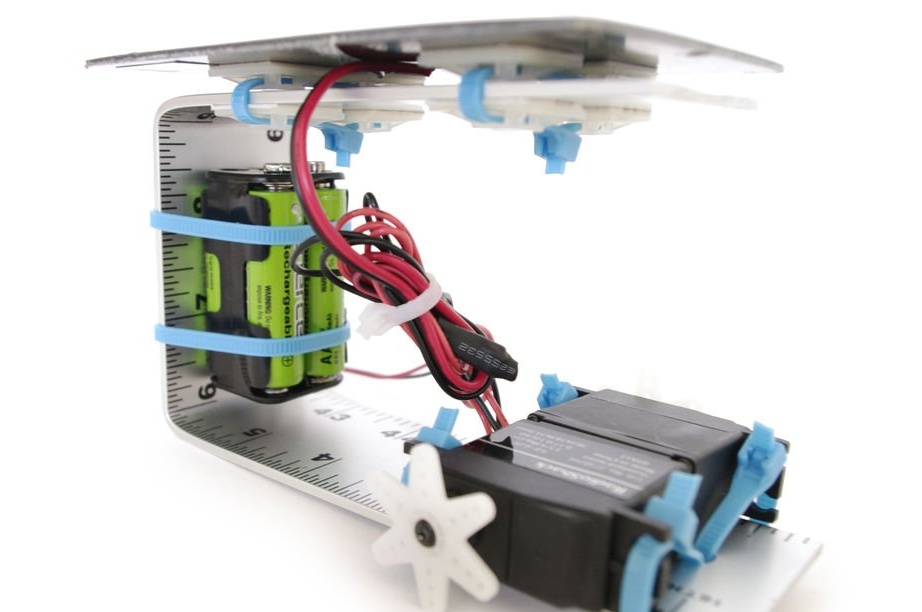
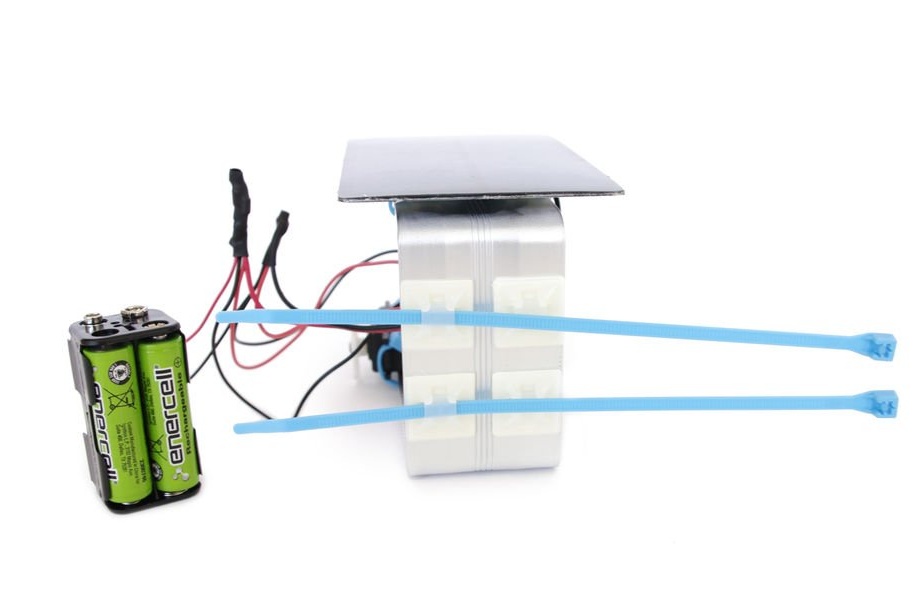
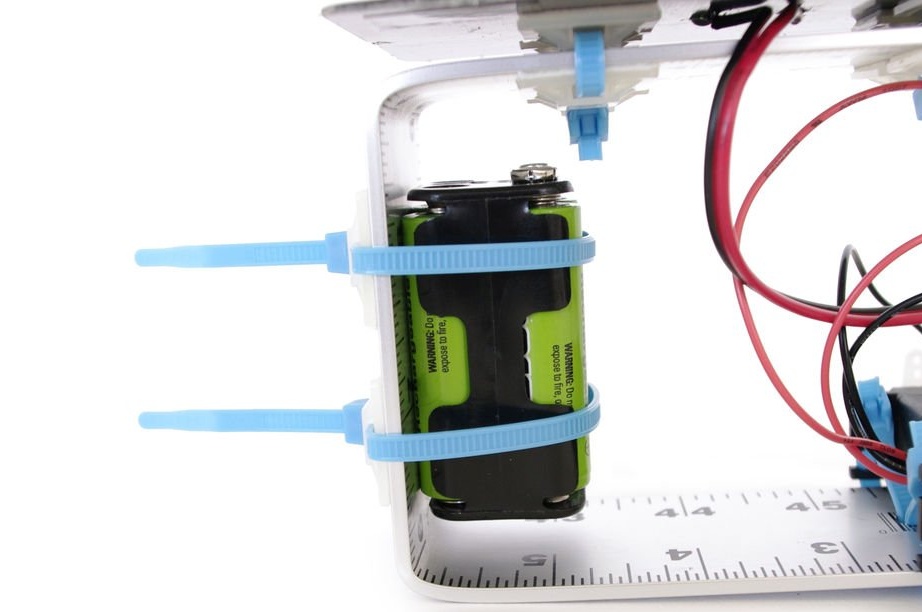
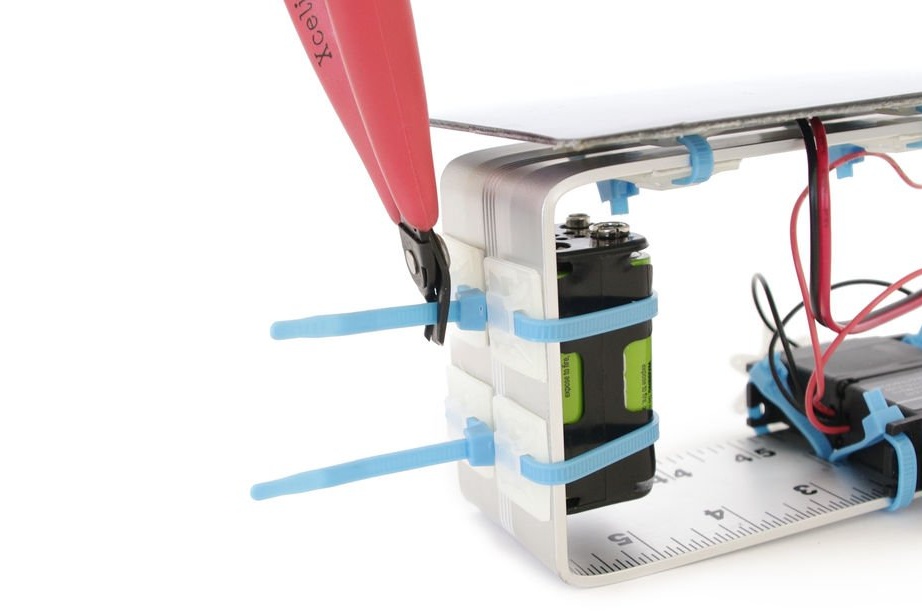
Säkra batterierna med klämmor inuti den U-formade linjalen så att de sitter ordentligt och rörligt på plats.
Steg 15: Klippning


Skär krokarna på plastväggfästena.
Steg 16: Hjul
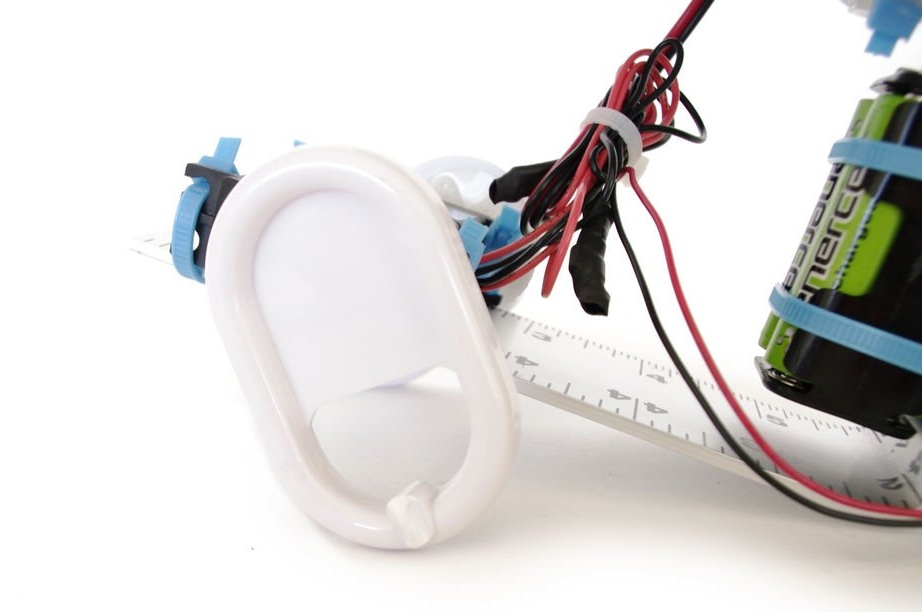
Limma väggfästena på servos yttre kugghjul (detta kommer att vara något som hjul).
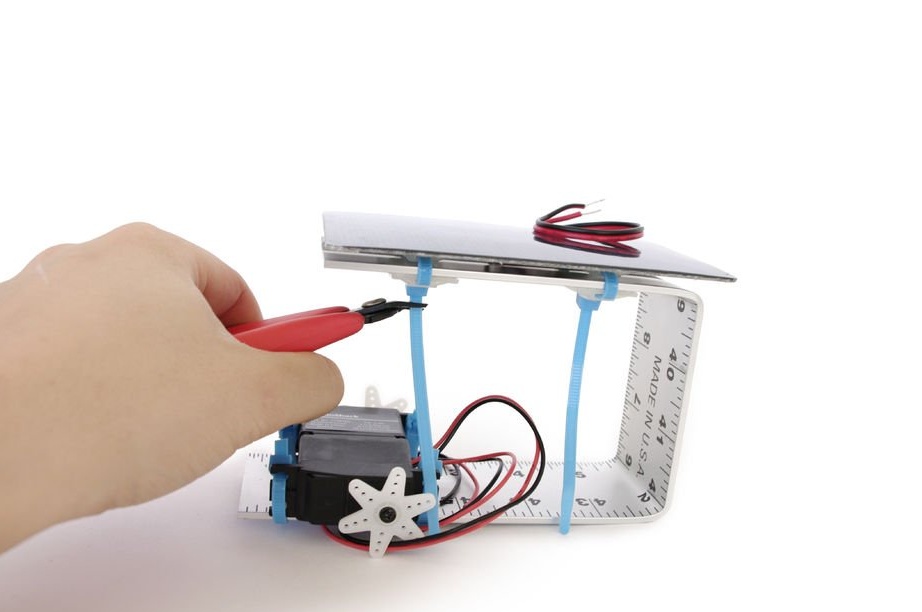
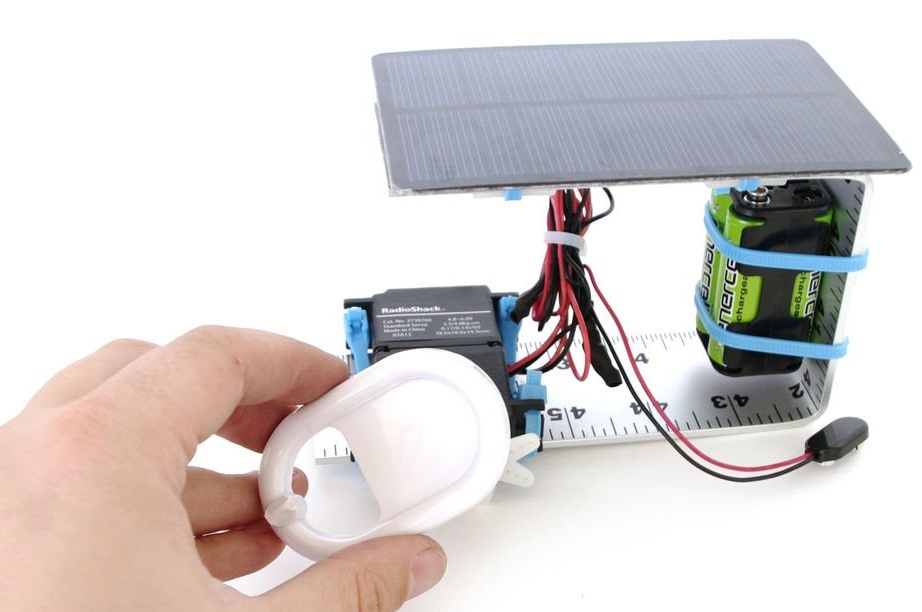
Steg 17: Slå på!

Anslut ledningen till batteripaketet så kommer roboten att börja röra sig.