
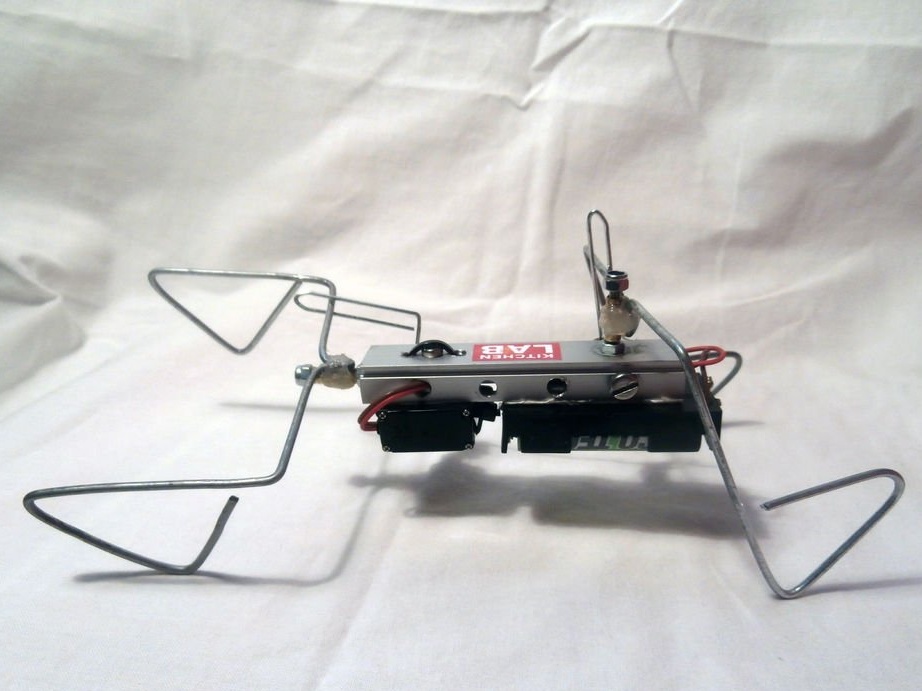
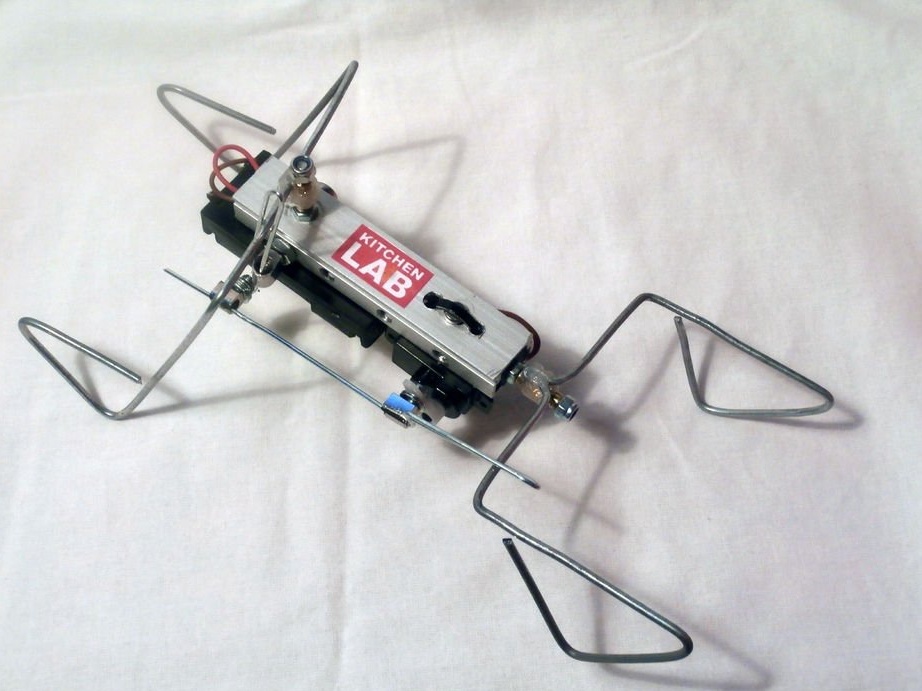
Hej alla! Jag blev inspirerad att skapa min BEAM-robot, efter att ha sett tillräckligt med dessa enkelmotors- och tvåmotorsunderverk av robotik på Internet. Tanken var att skapa en gångrobot, gå på samma sätt som 1- eller 2-motoriga BEAM-vandrare. Efter flera misslyckade experiment gjorde jag vad jag ville!
Steg 1: Mekanismen
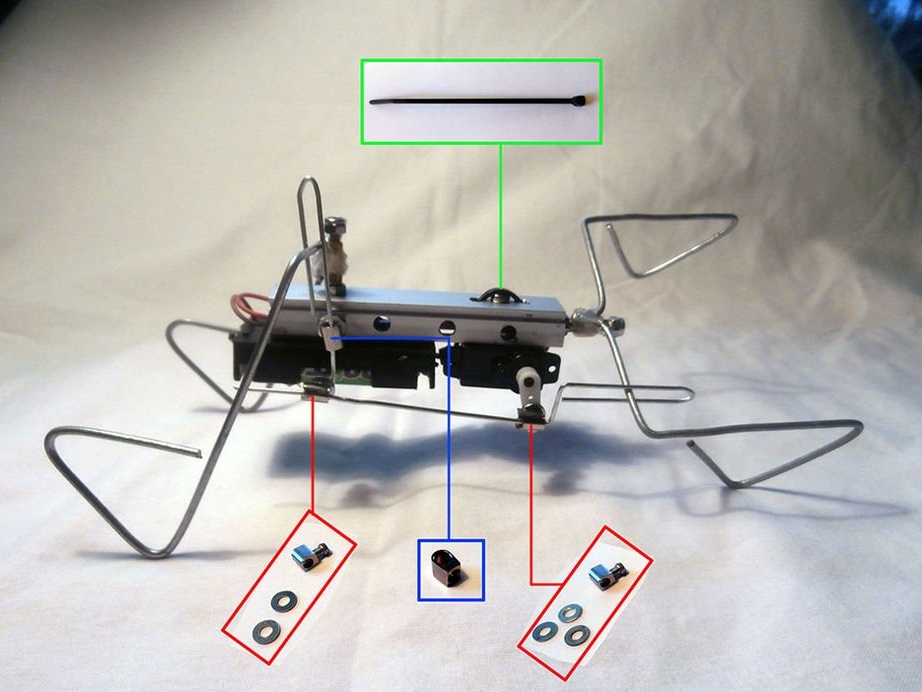
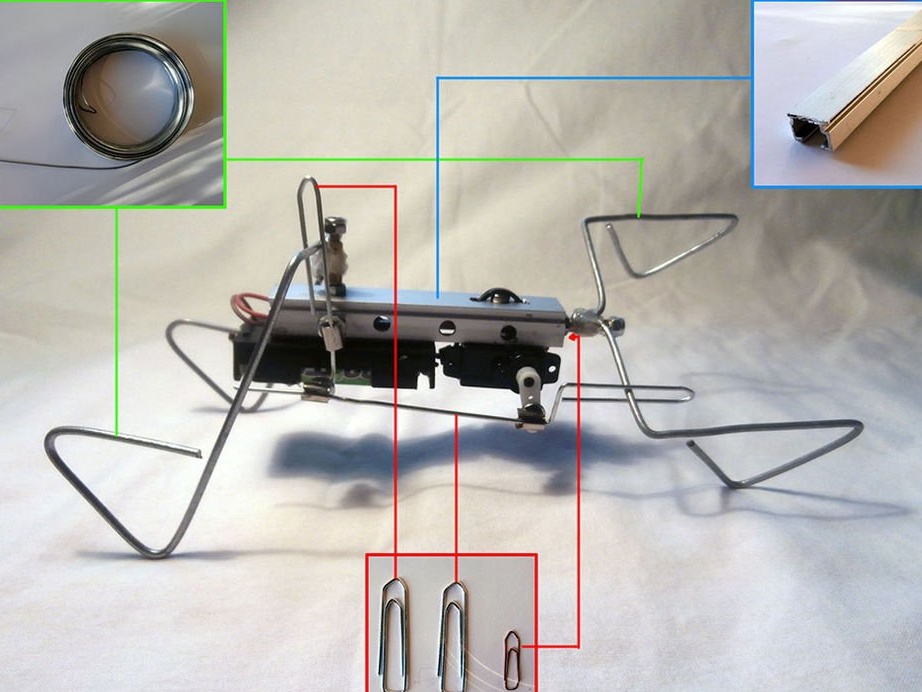
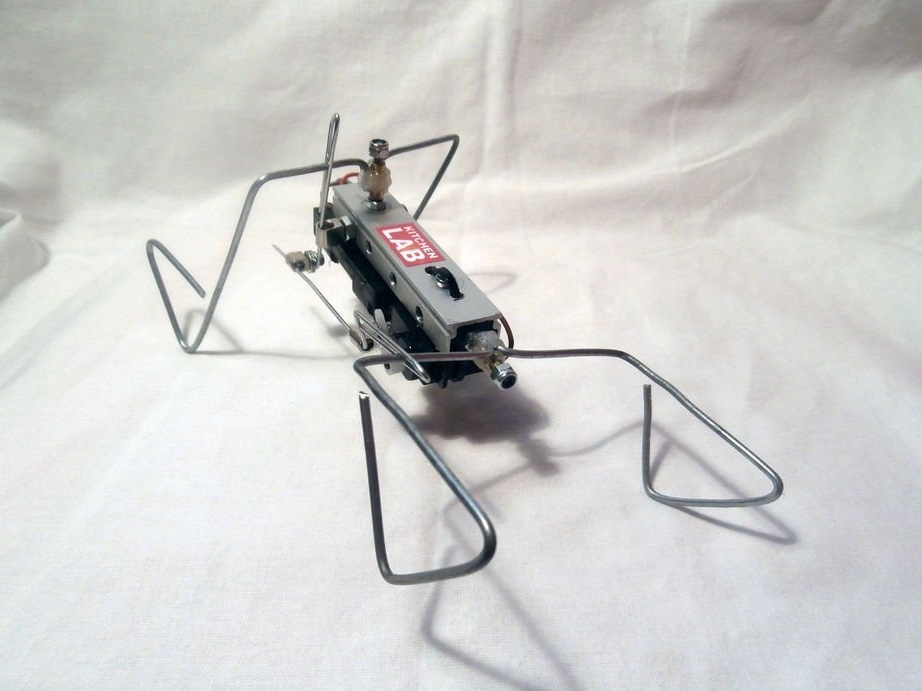
Steg 2: Erforderliga delar

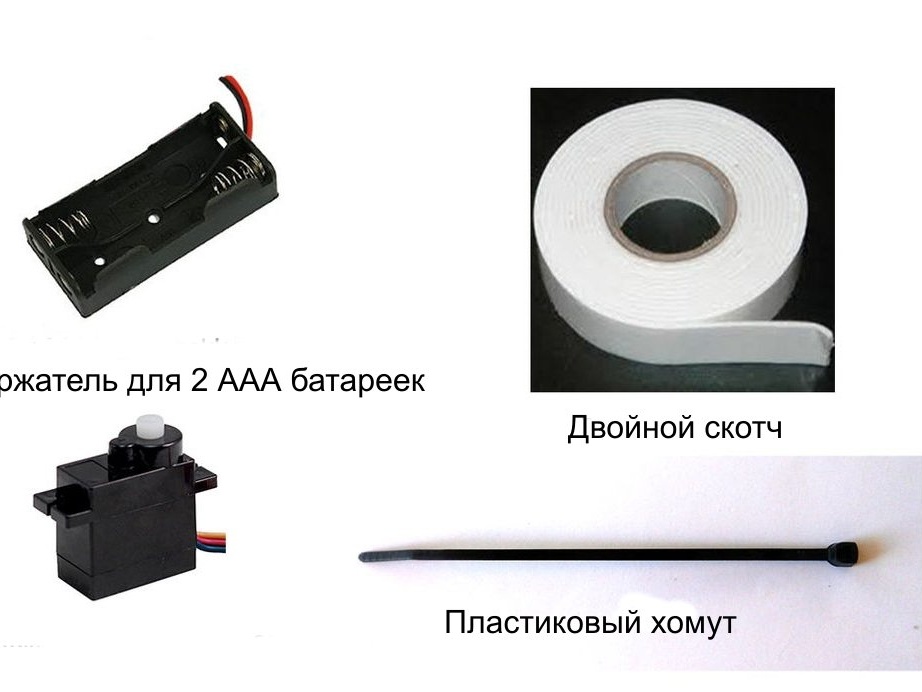



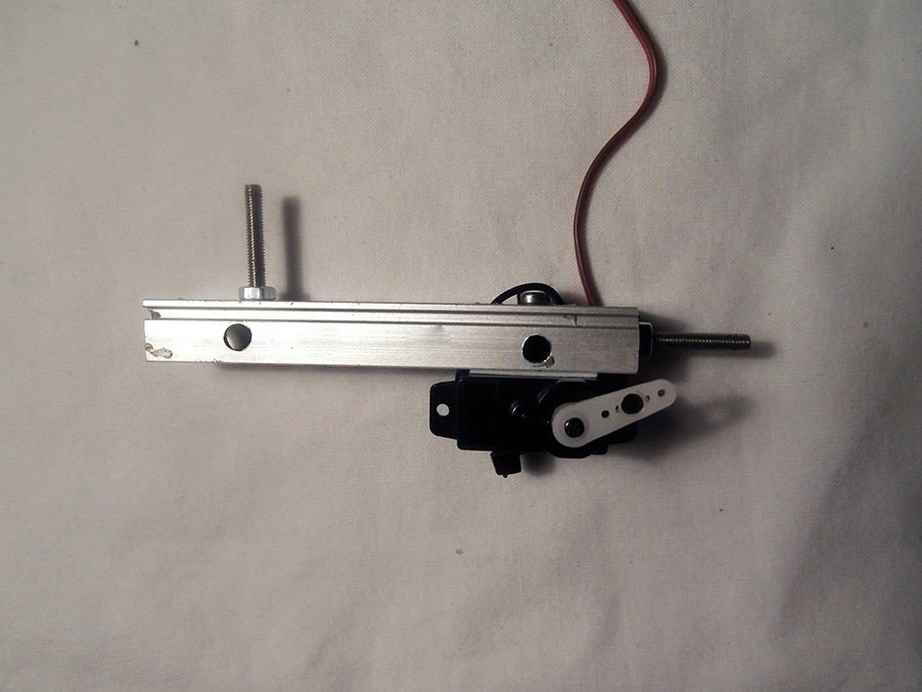
(1x) servo för kontinuerlig rotation
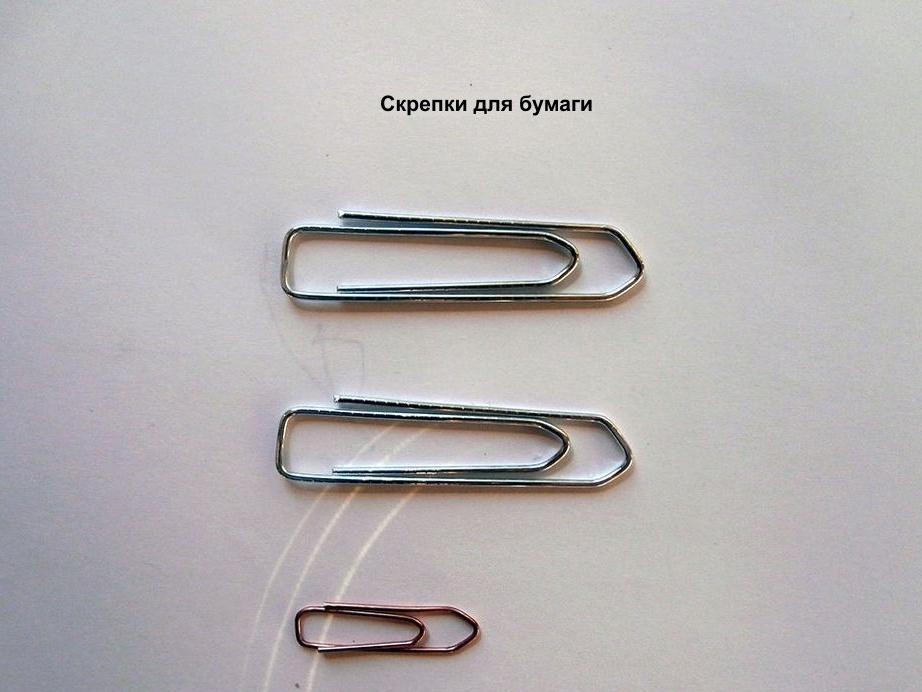
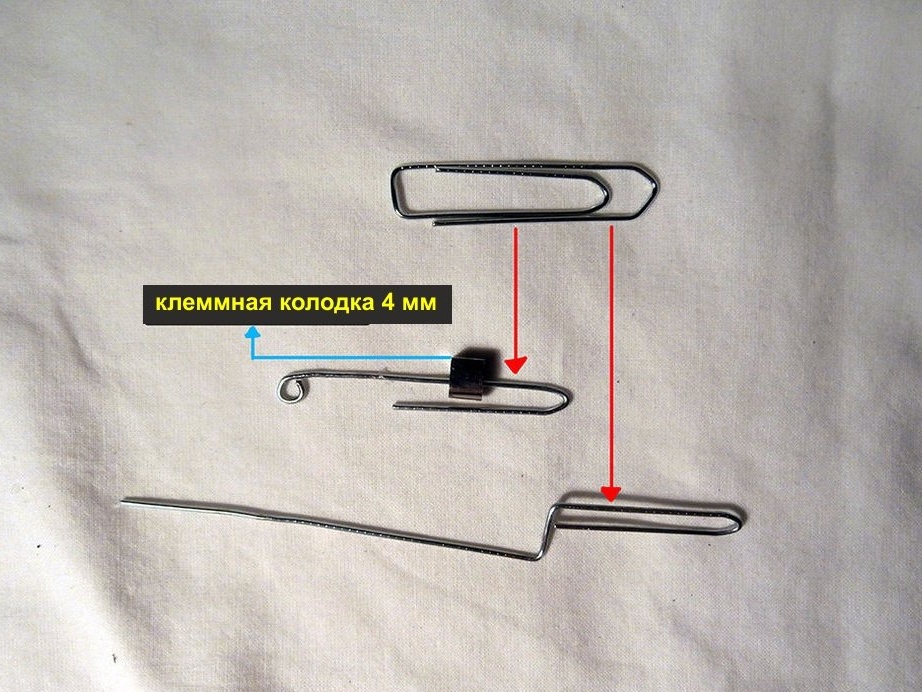
(2x) stora pappersklipp
(1x) litet gem
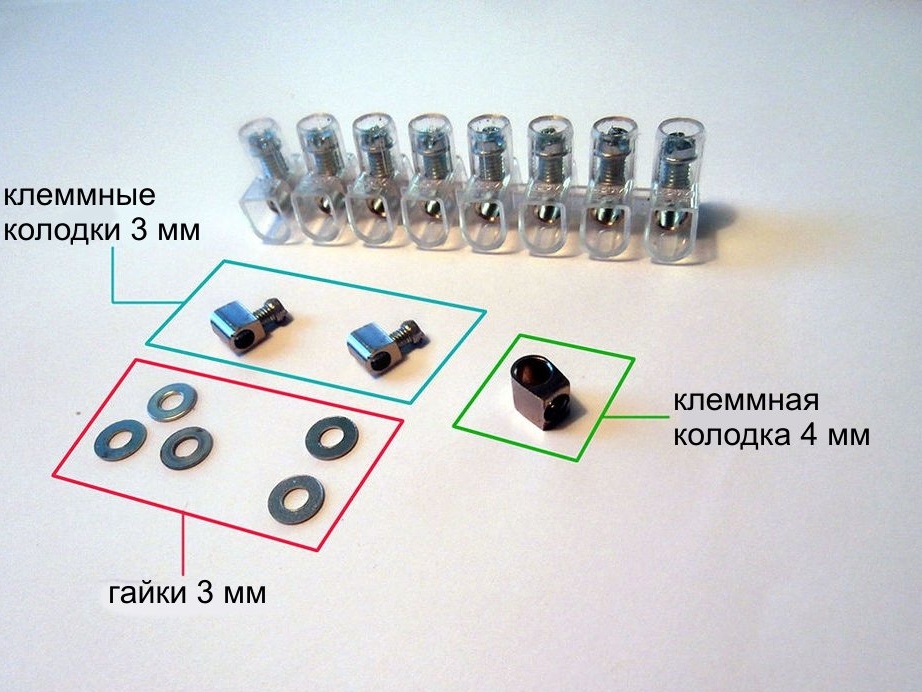
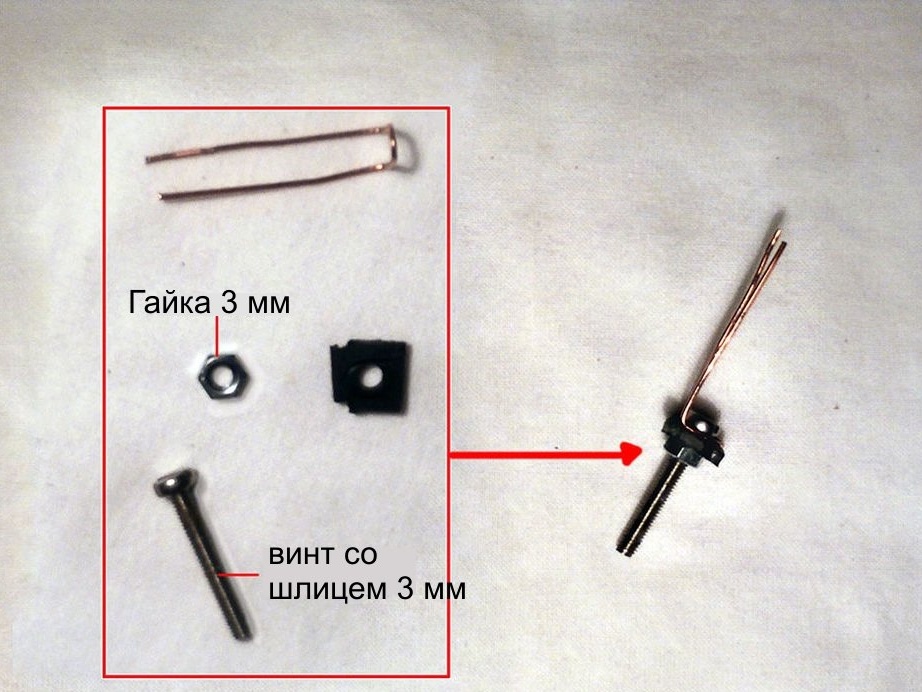
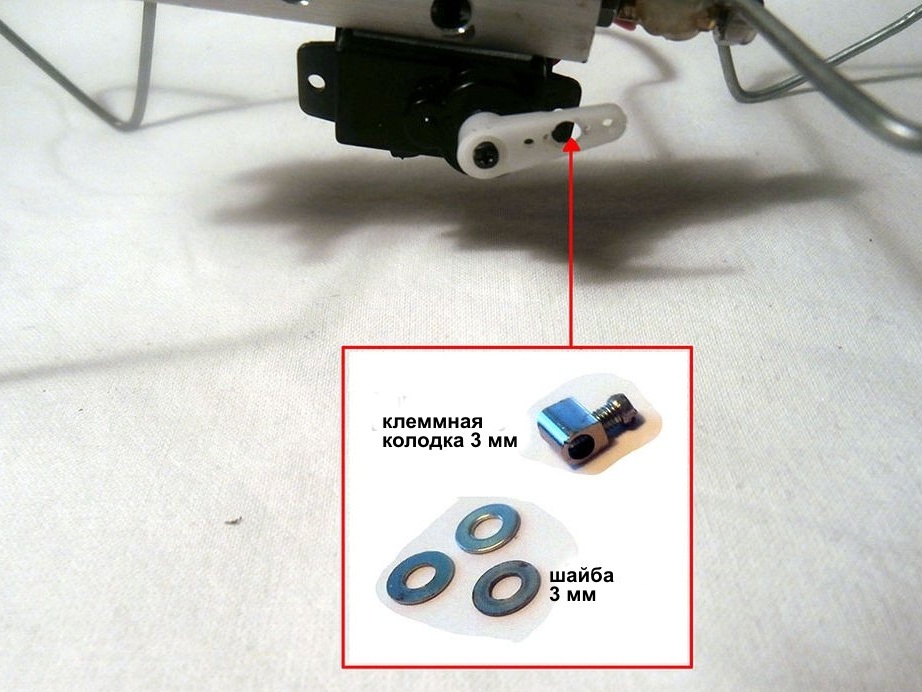
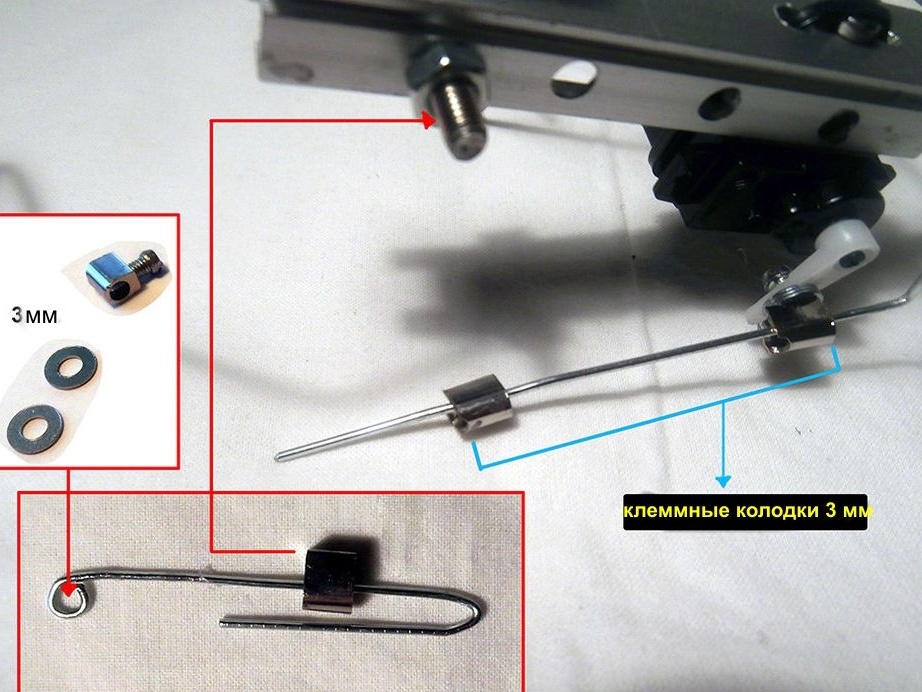
(2x) anslutningsblock (3 mm)
(1x) anslutningsblock (4 mm)
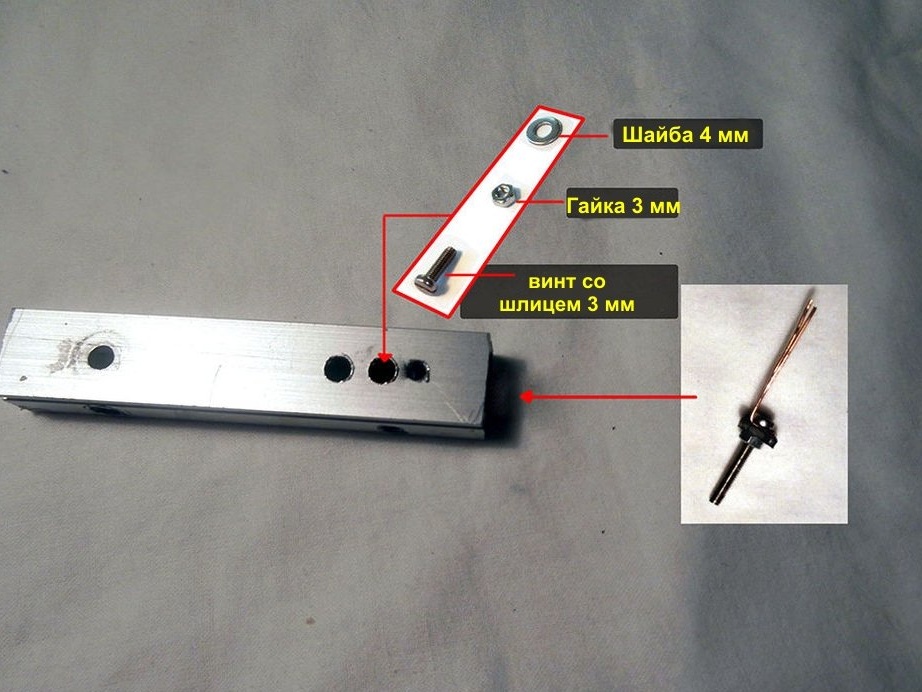
(1X) Använt aluminiumprofilblock
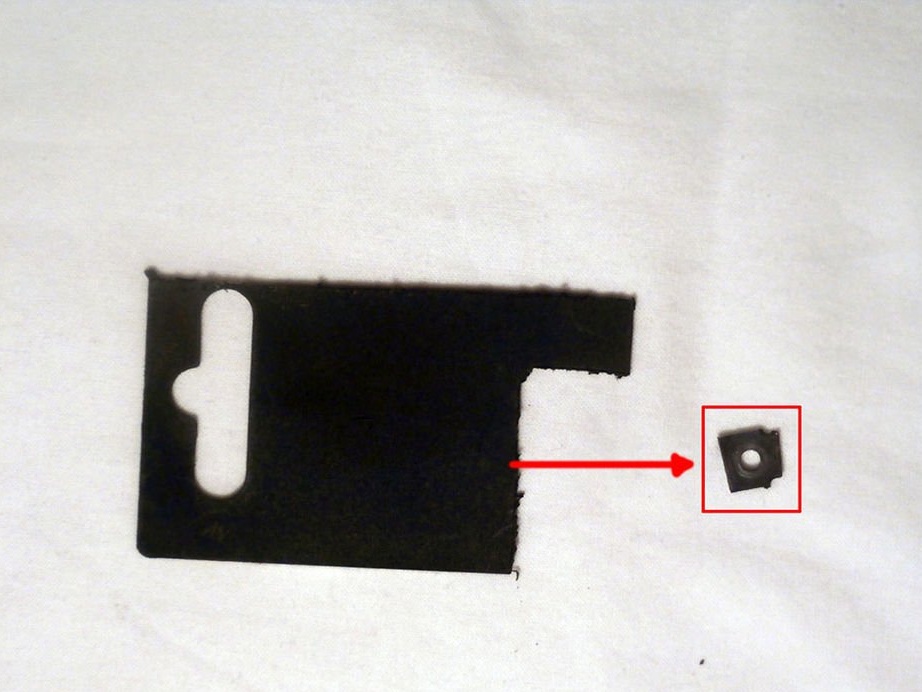
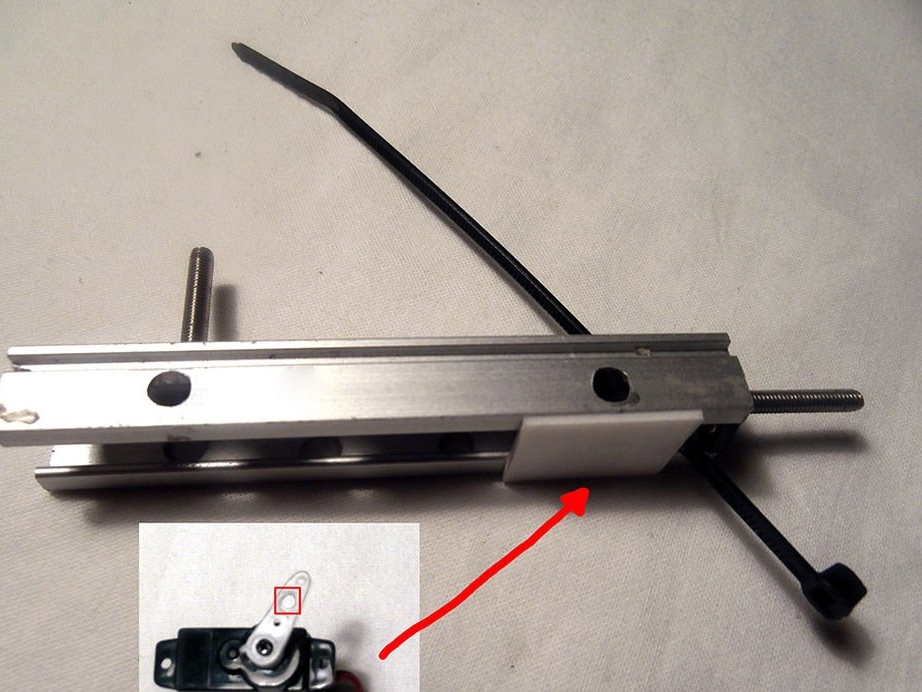
(1X) plastbit
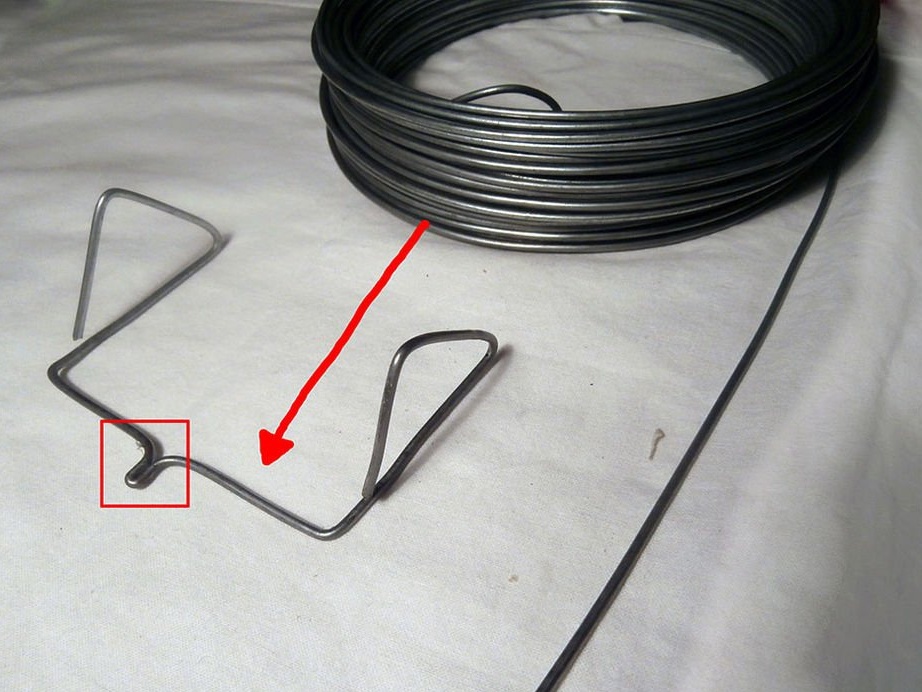
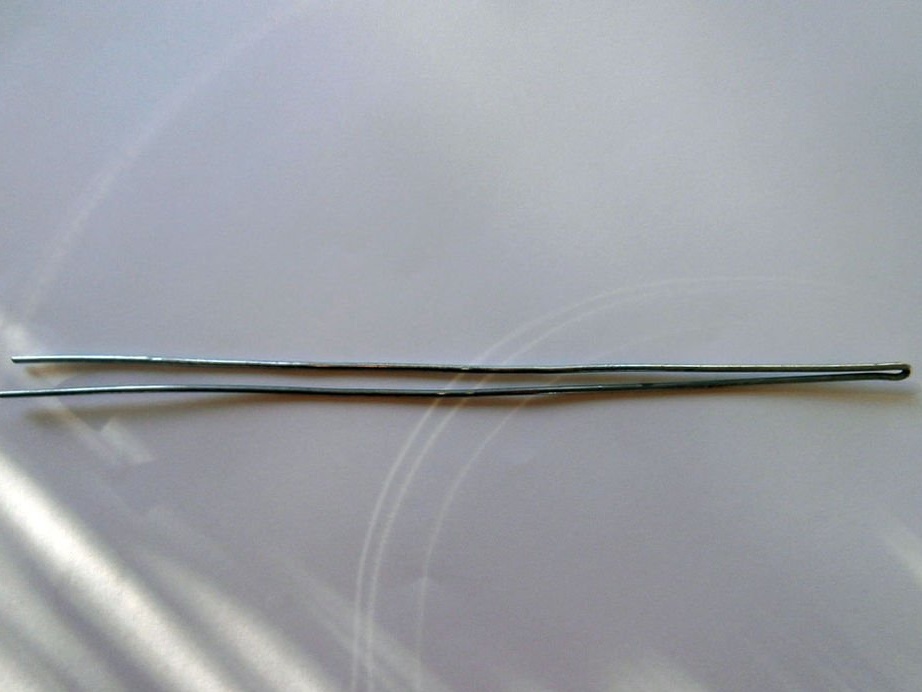
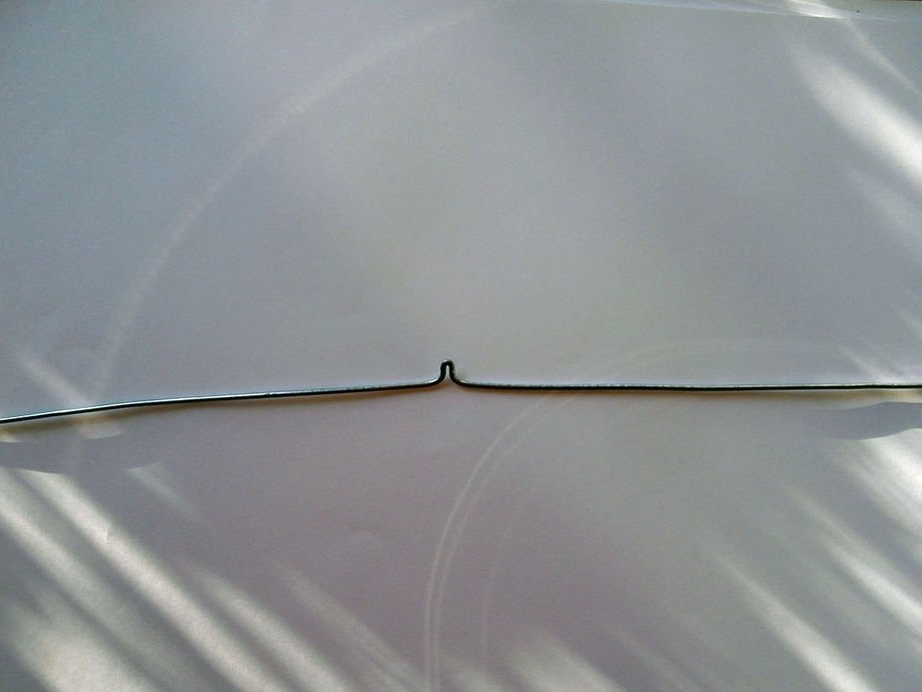
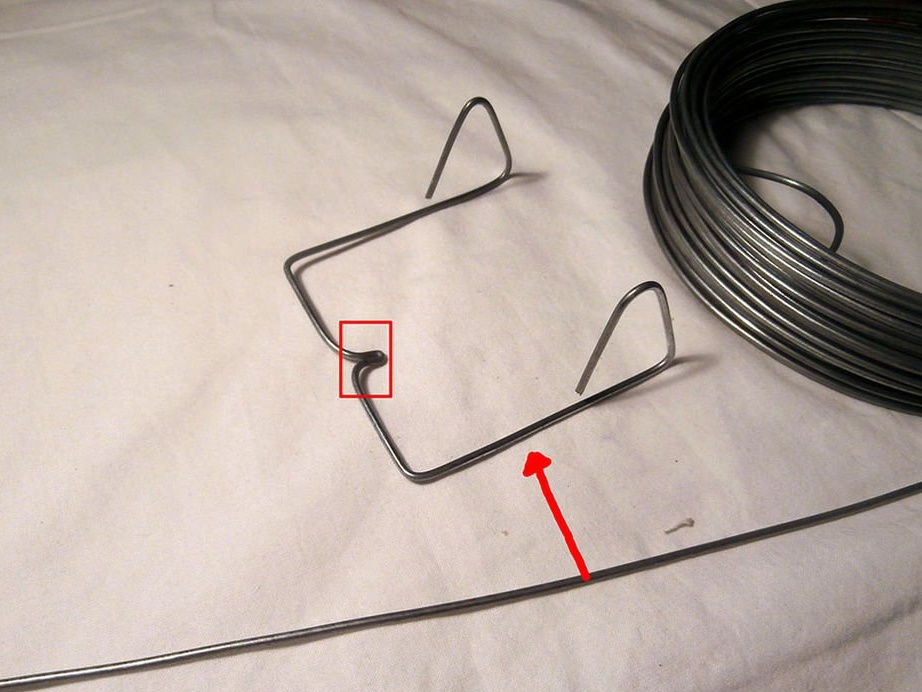
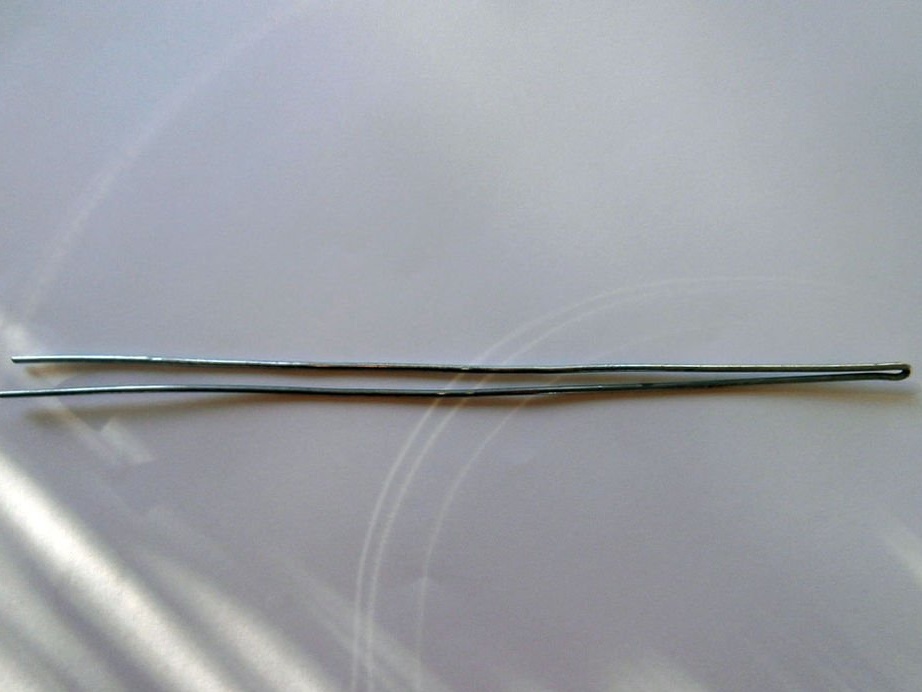
Ståltråd (2 mm)
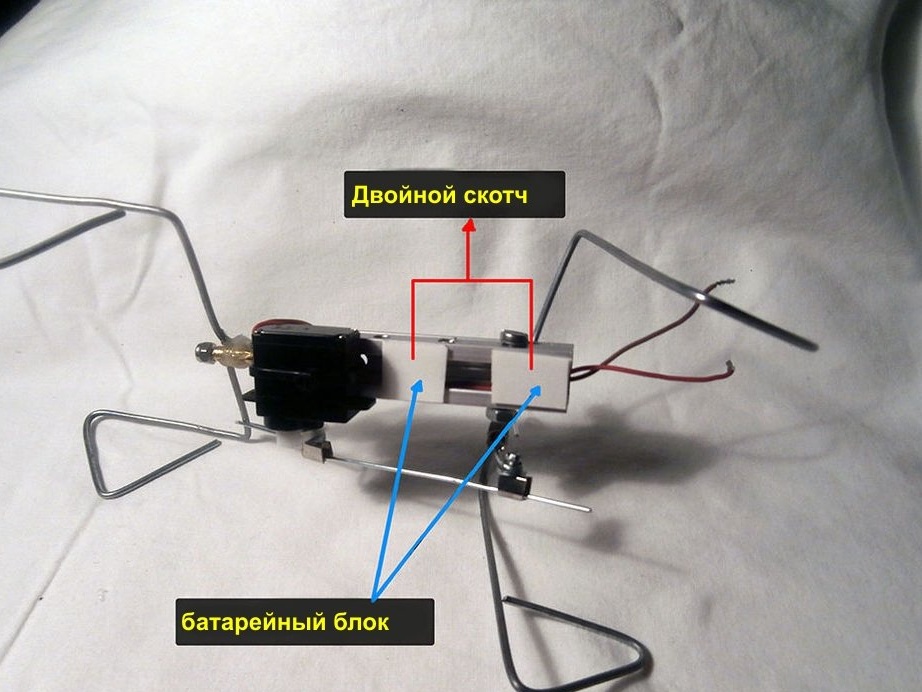
Dubbel självhäftande tejp
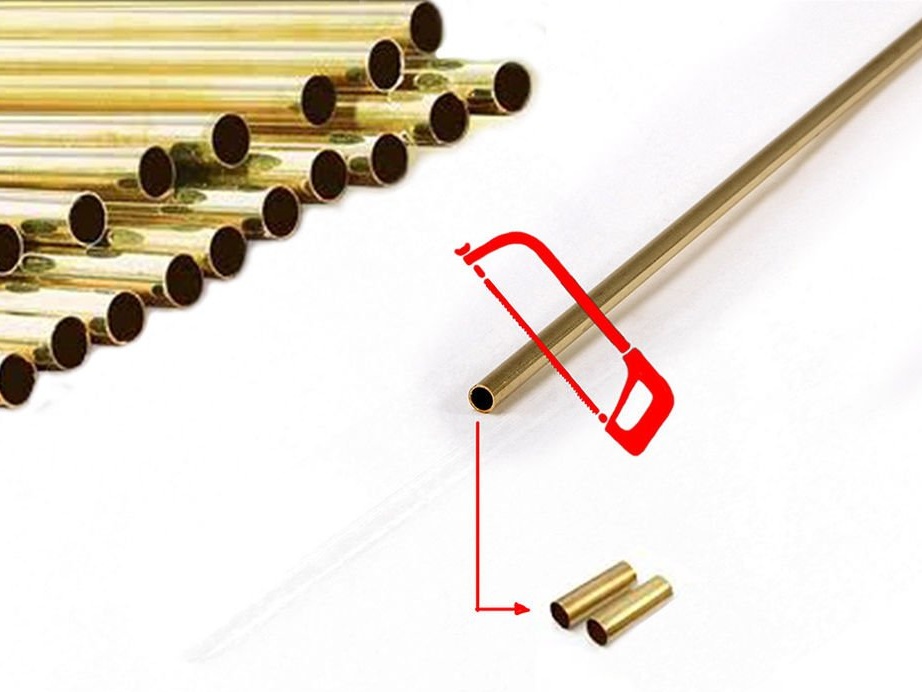
Mässingsrör
(1X) liten klämma
(1X) batteripaket (2 x AAA)
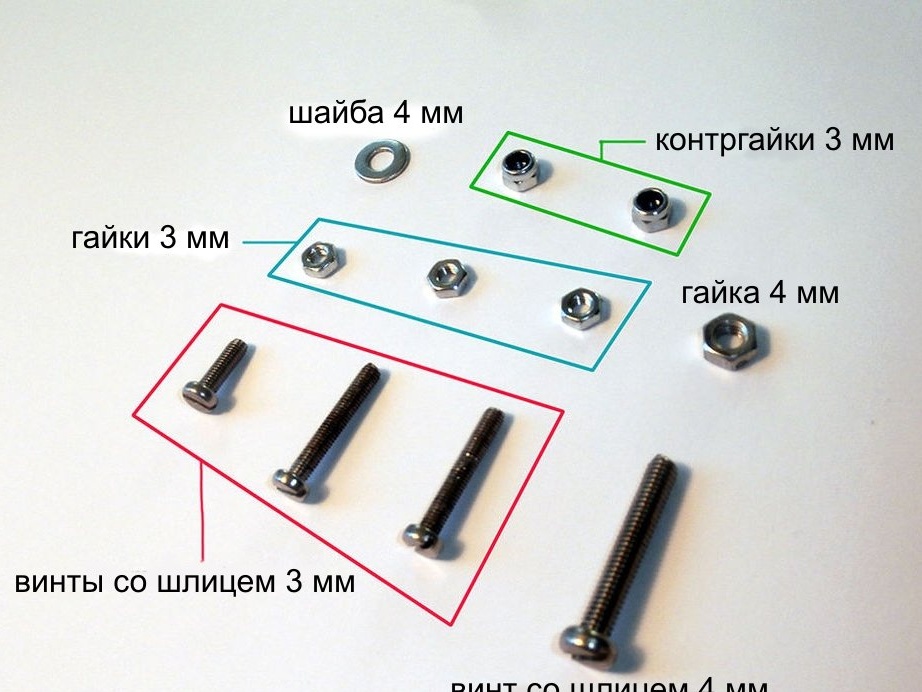
(2X) låsmuttrar (3 mm)
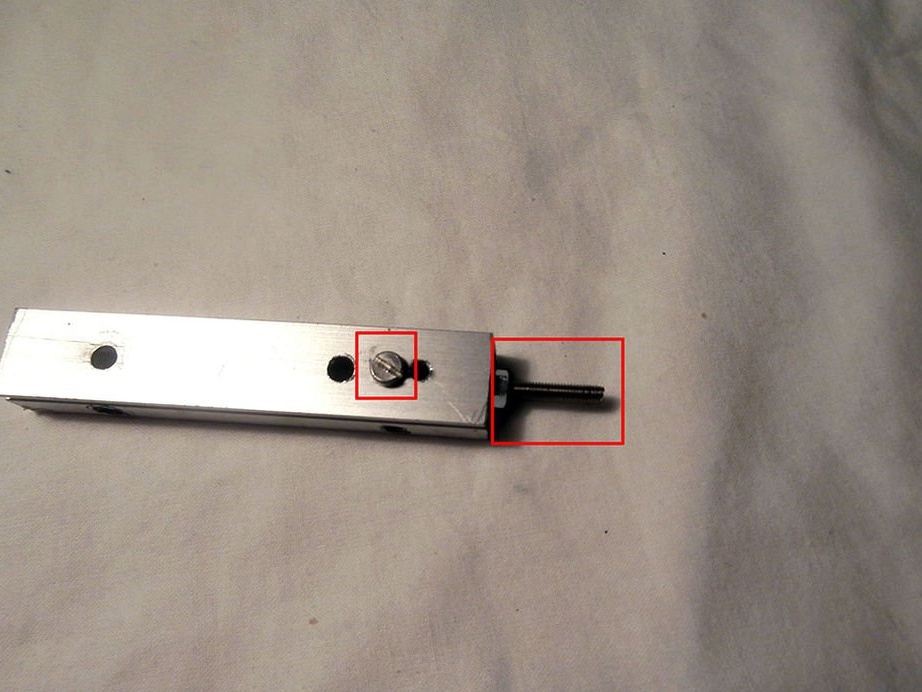
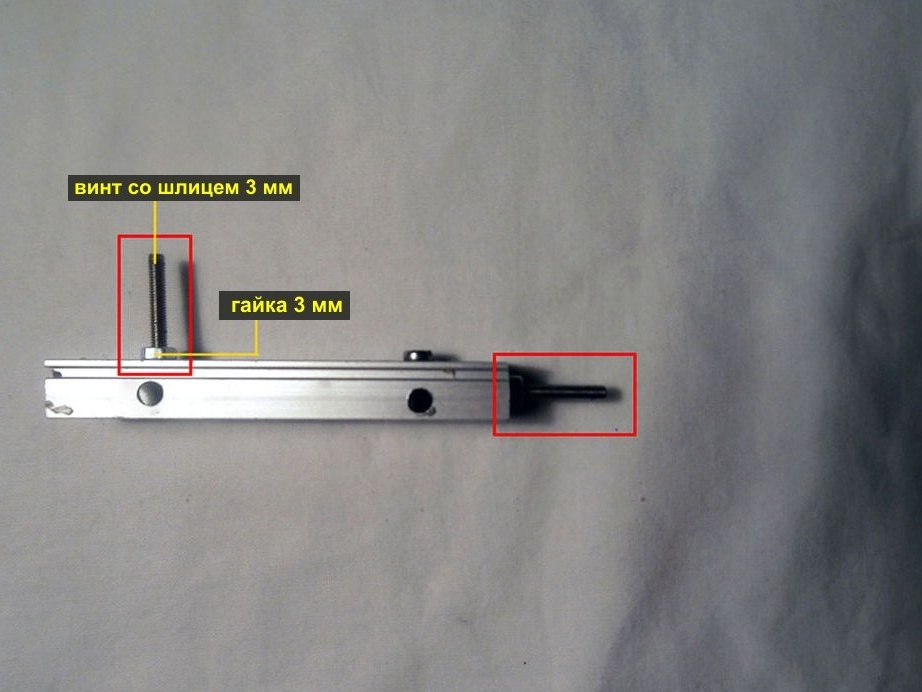
(3X) muttrar och skruvar (3 mm)
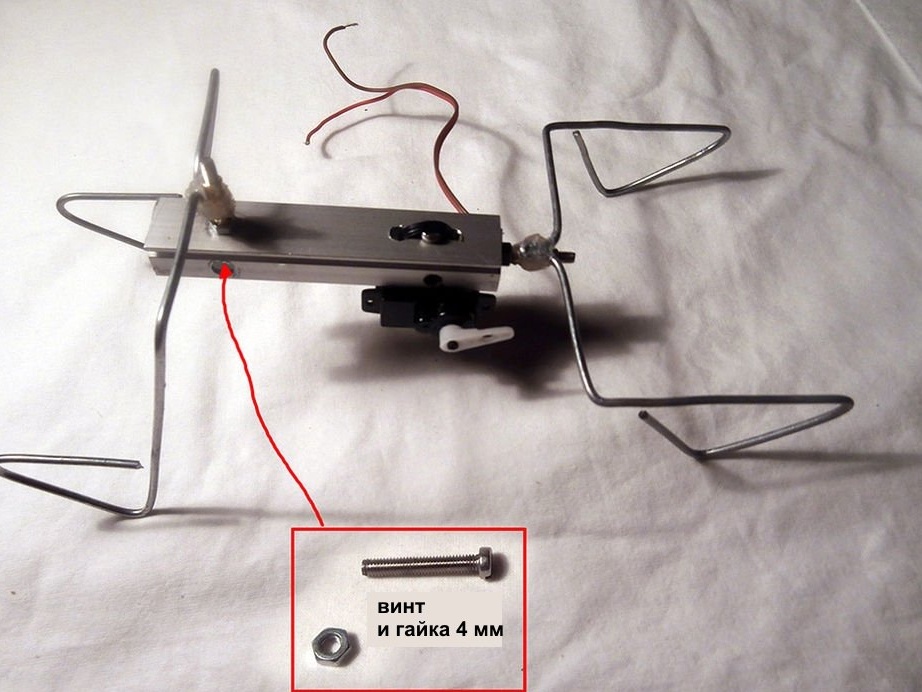
(1x) muttrar och skruvar (4 mm)
(5x) bricka (3 mm)
(1X) bricka (4 mm)
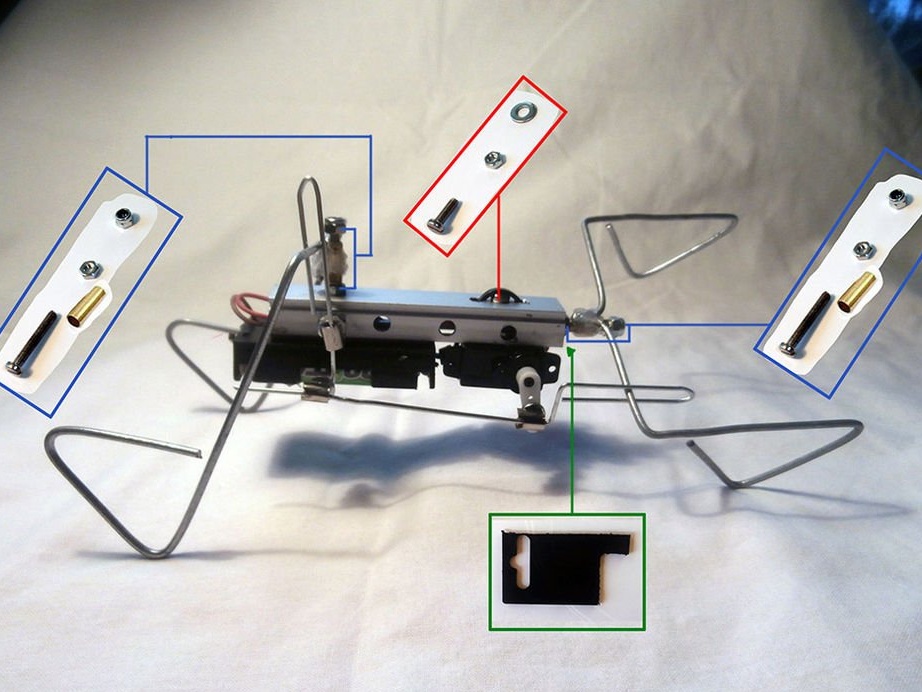
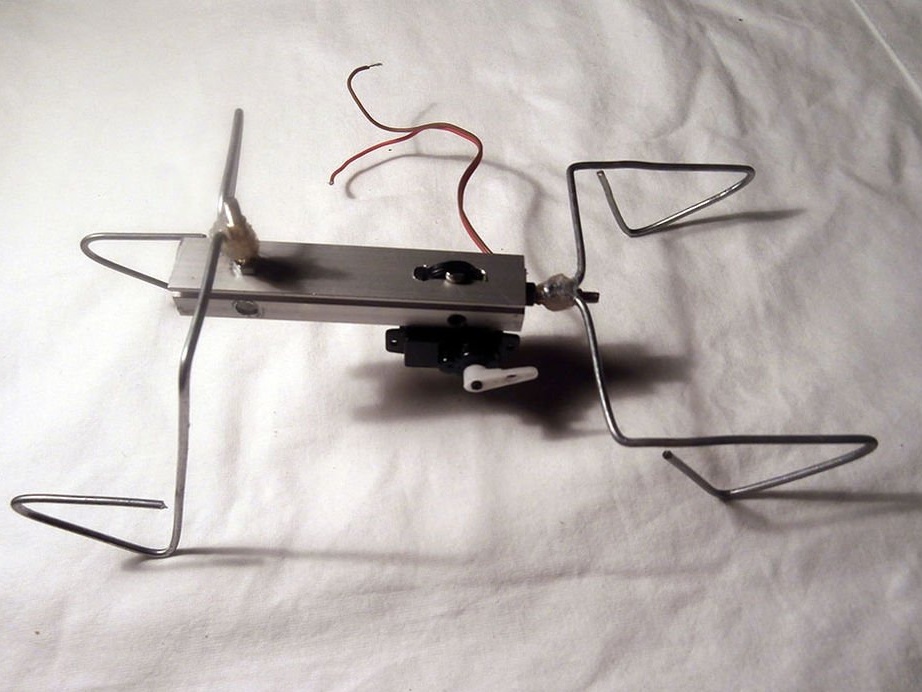
Steg 3: Montering av delar
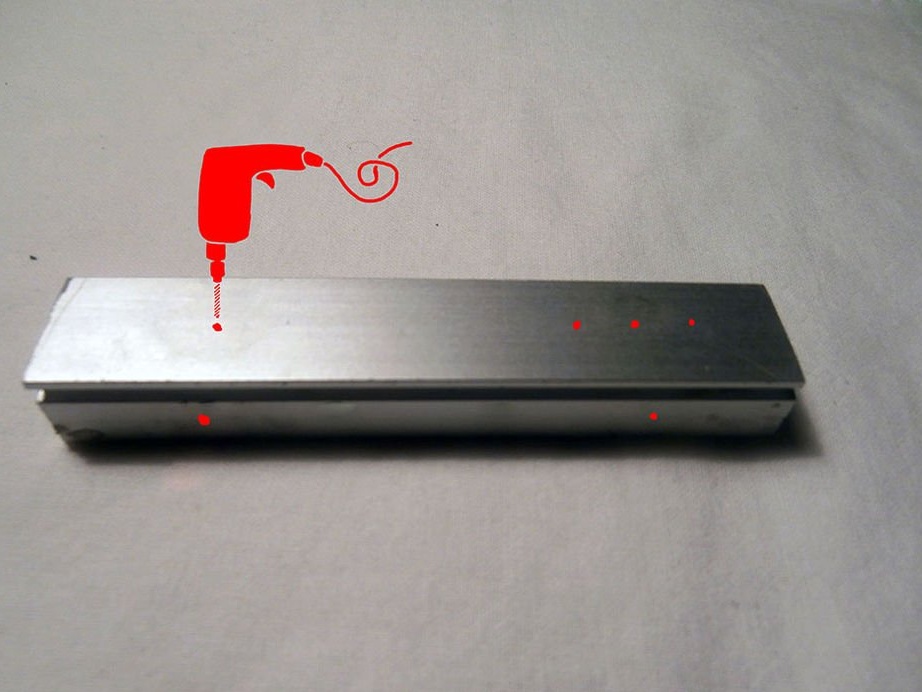
Steg 4: Verktyg
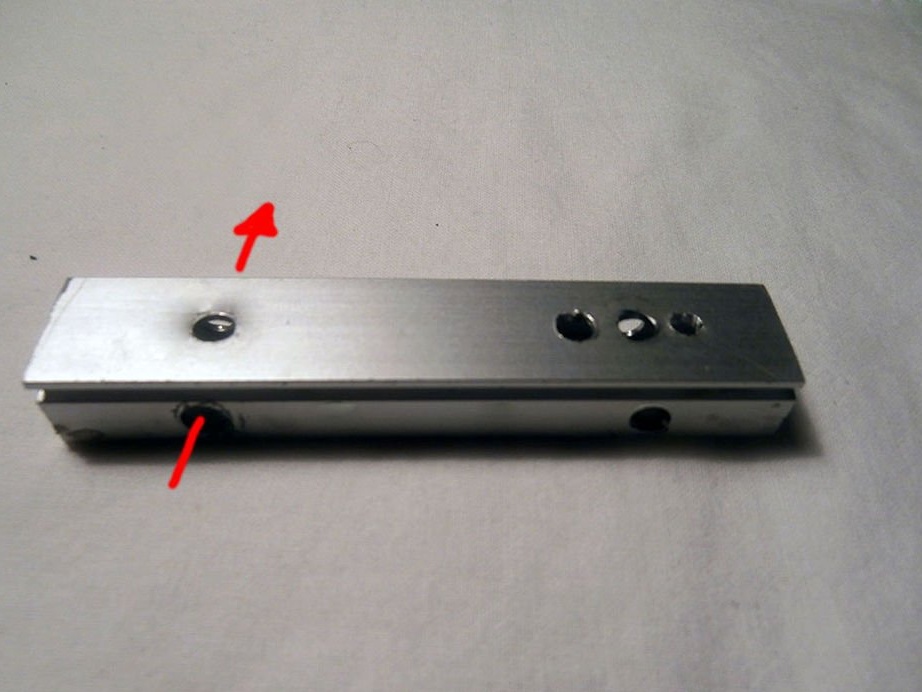
Steg 5: Bostäder

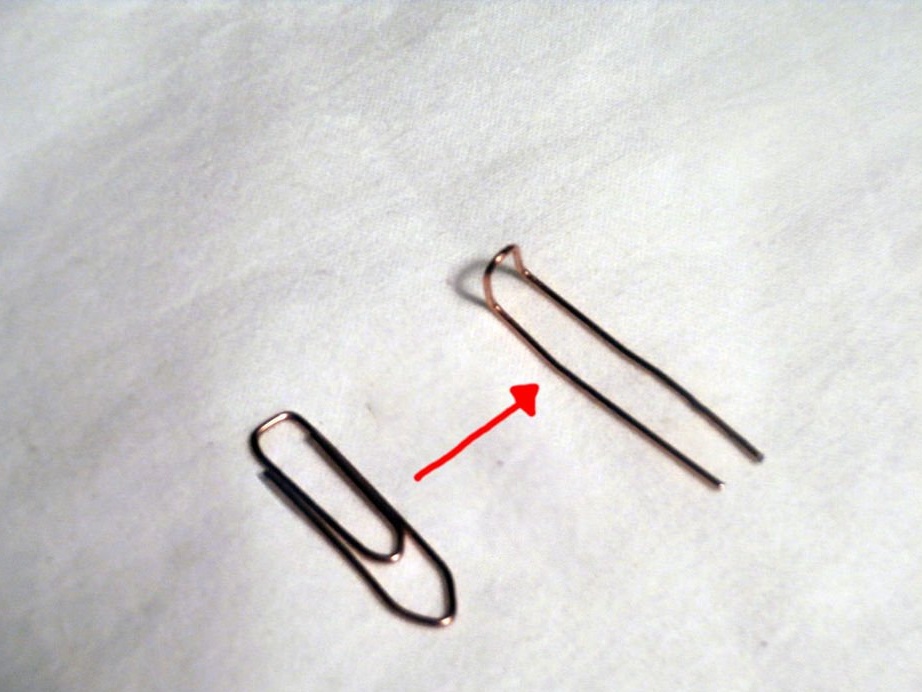

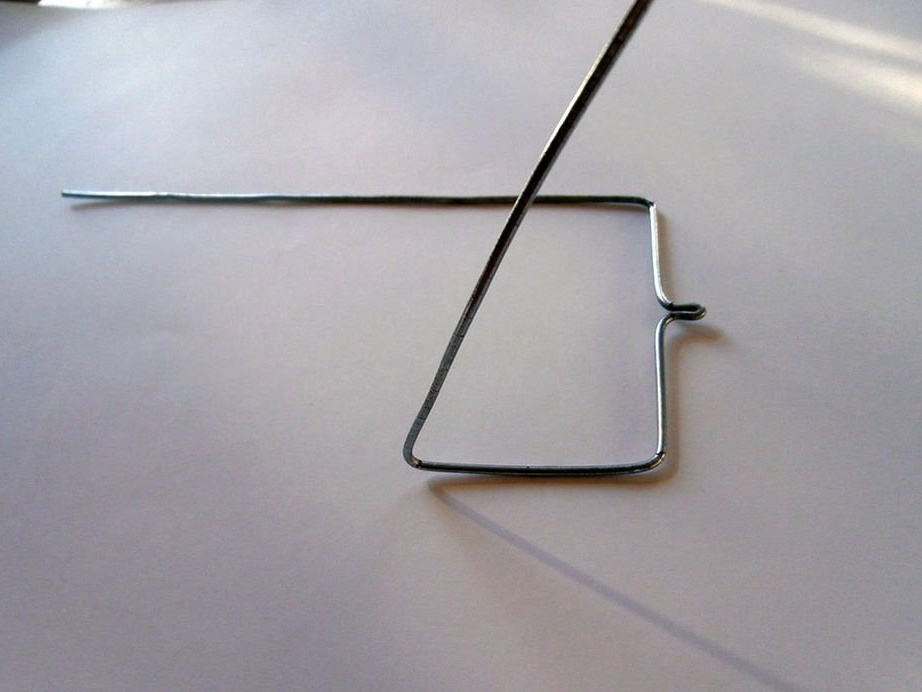
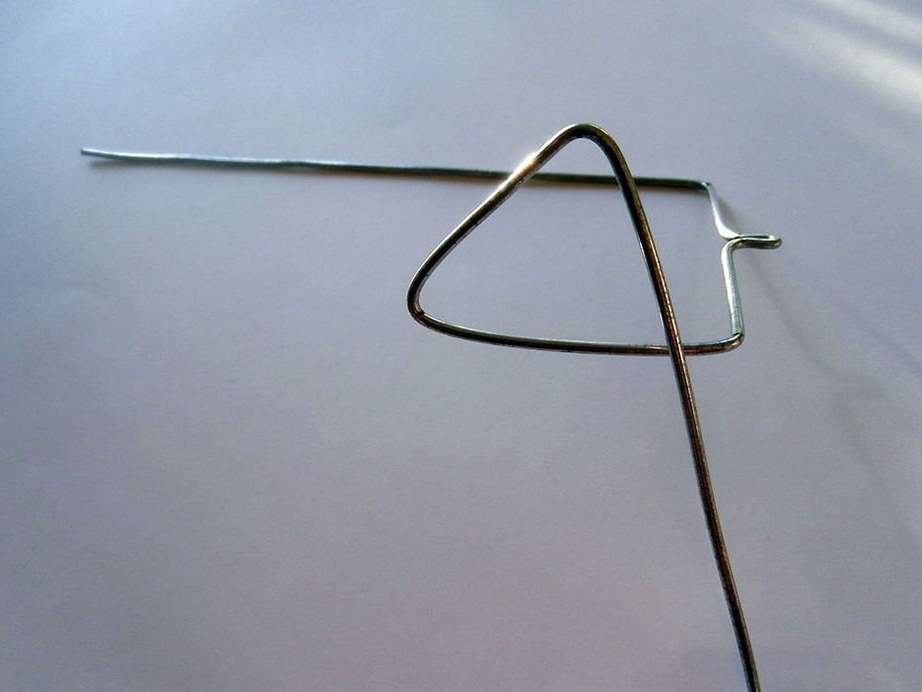
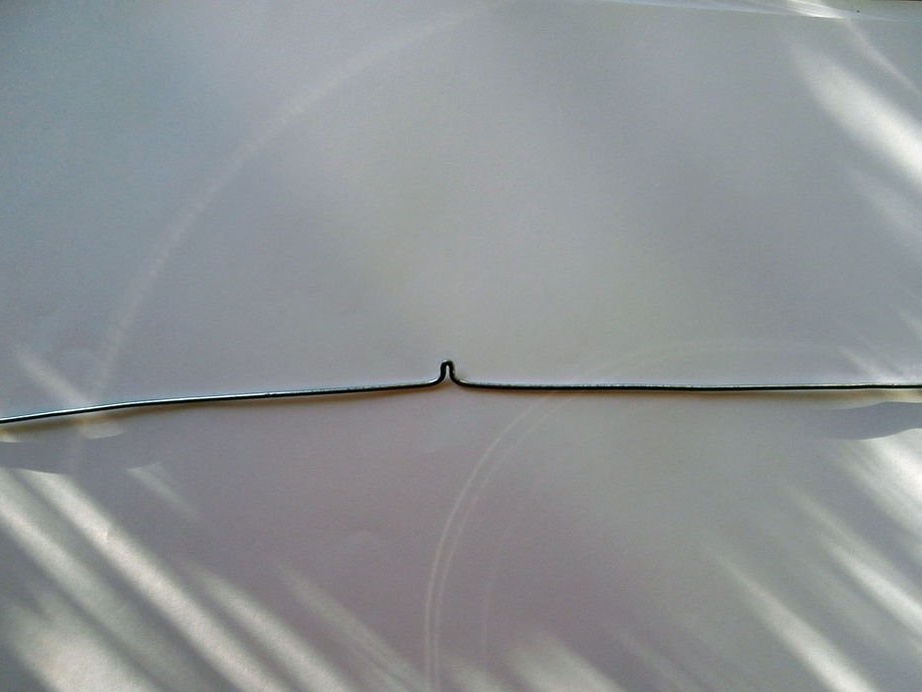
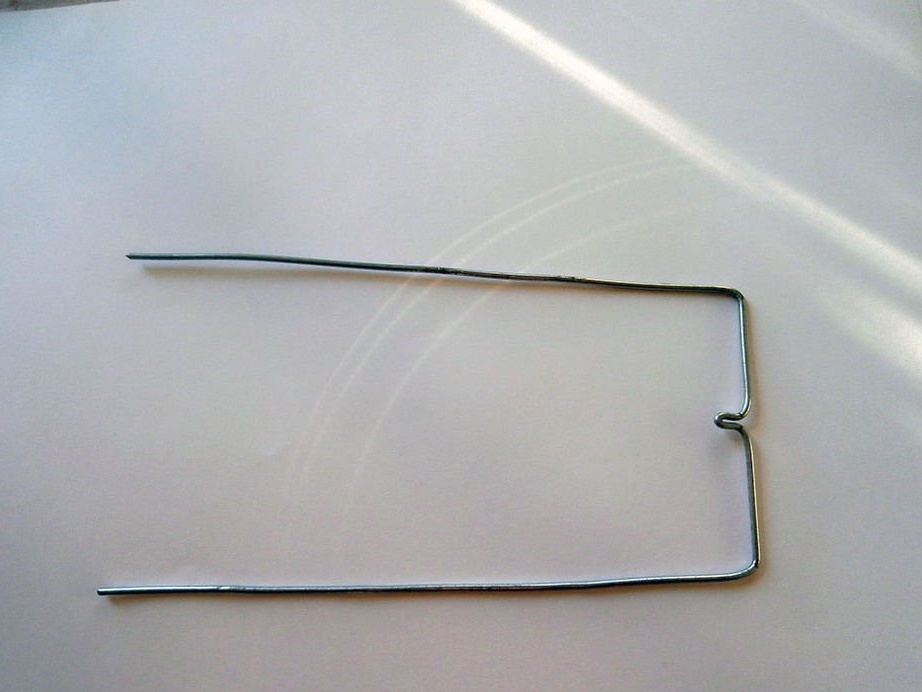
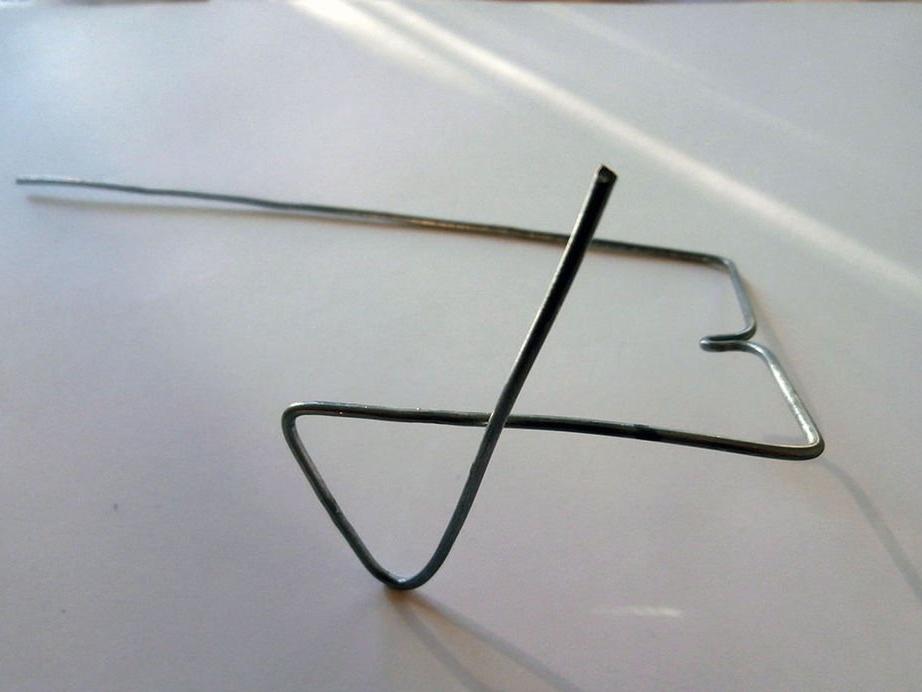
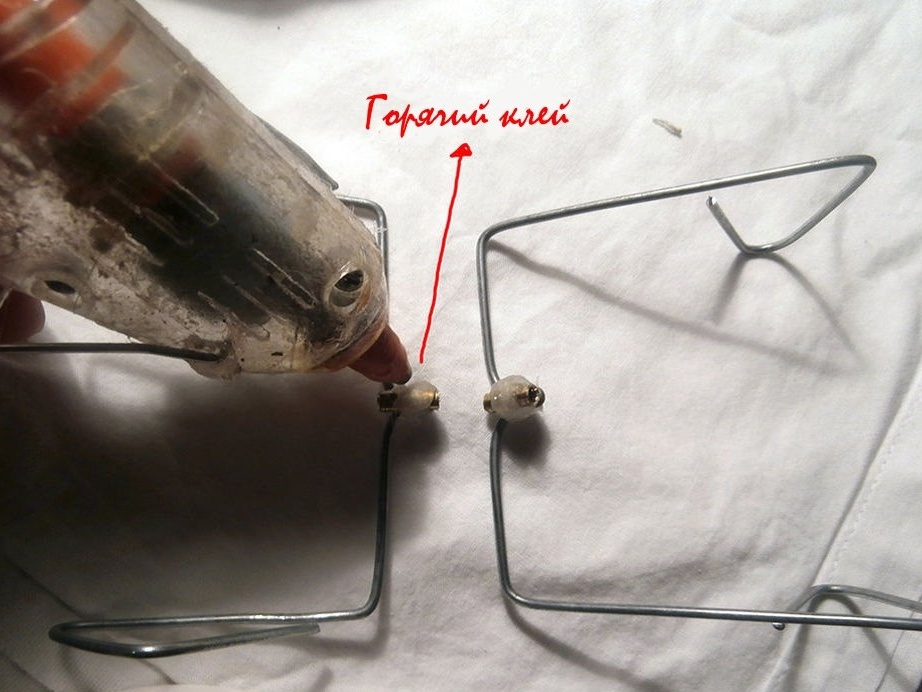
Steg 6: frambenen
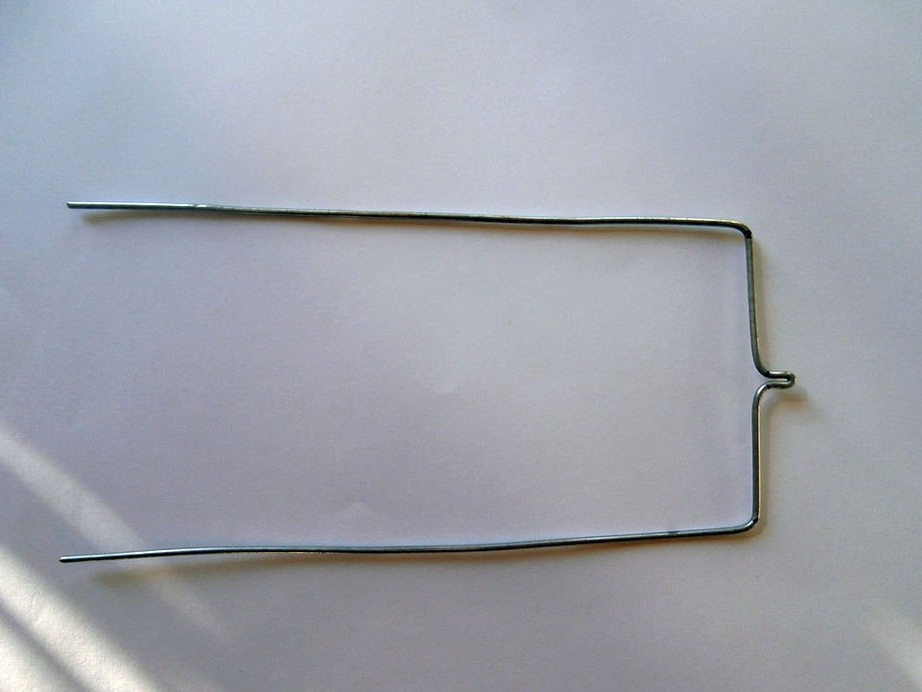
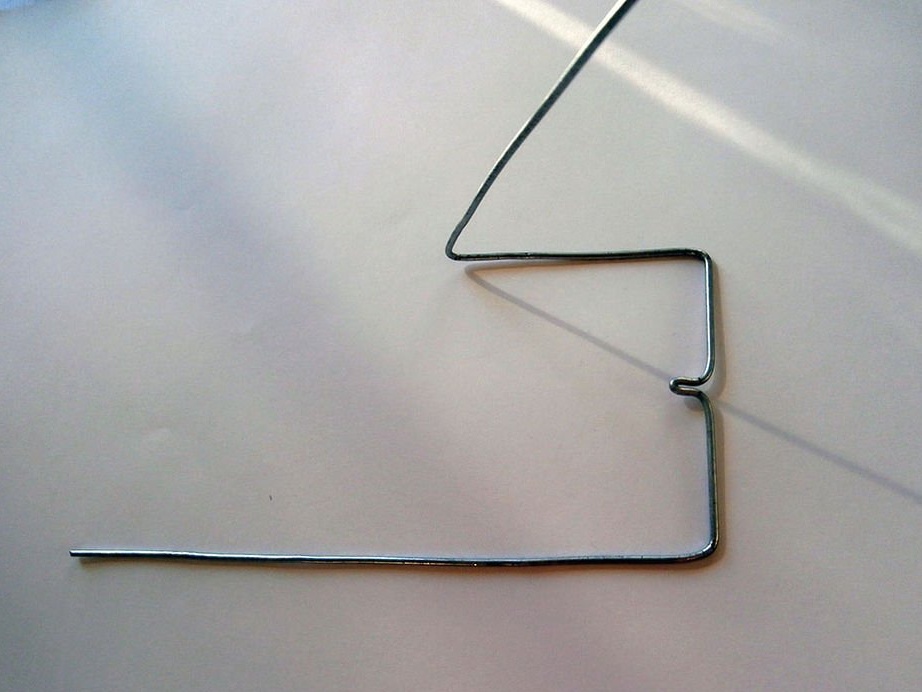
Steg 7: Bakben
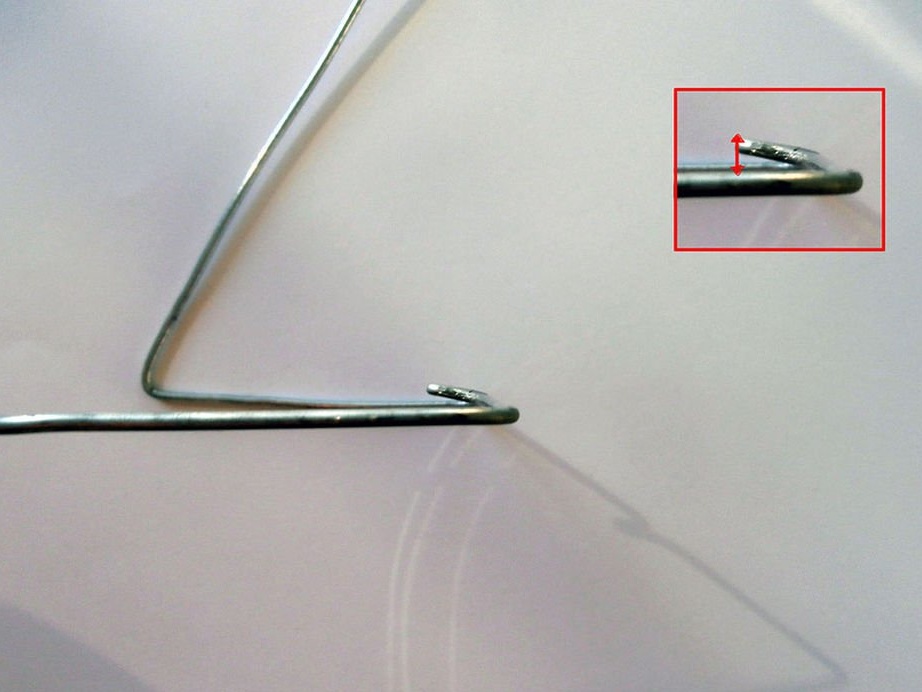
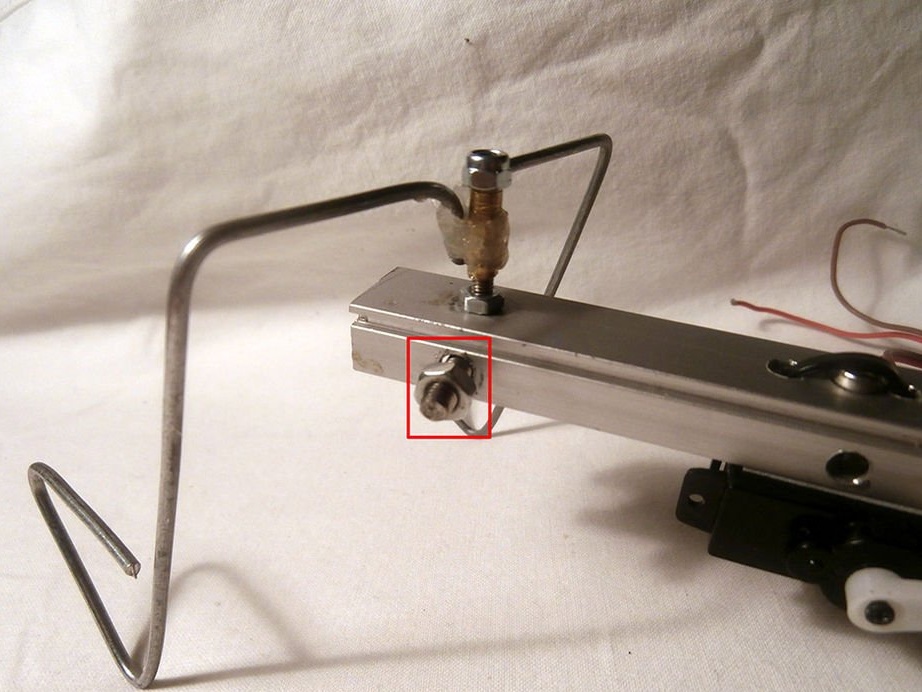
Steg 8: Fästa foten
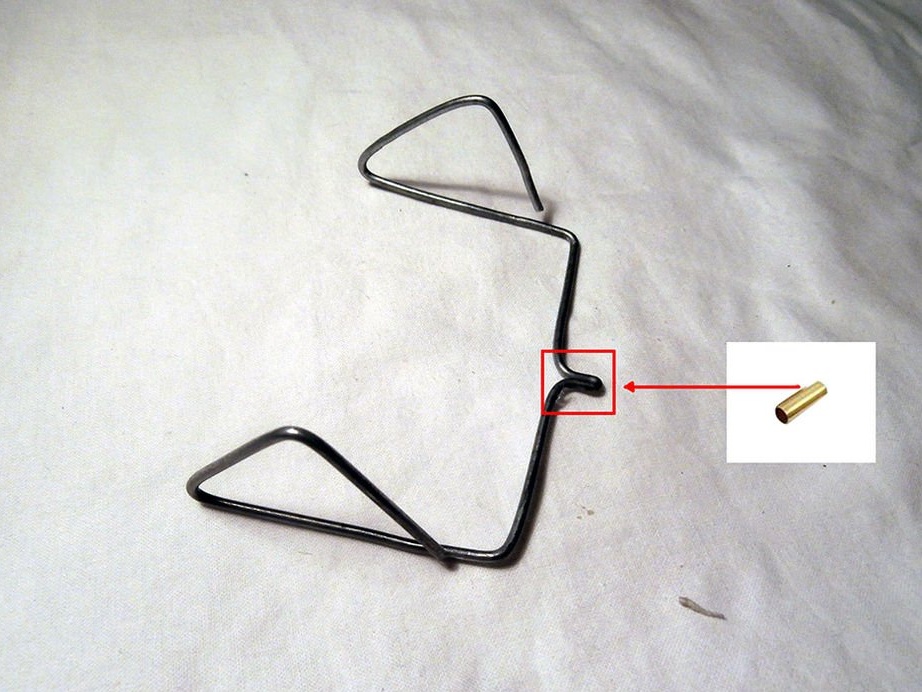
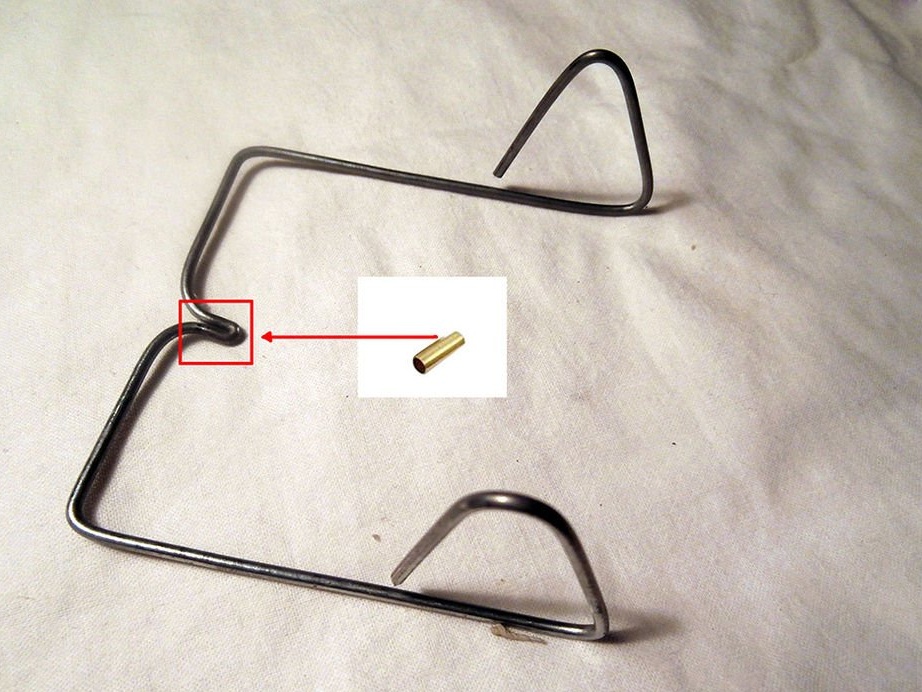
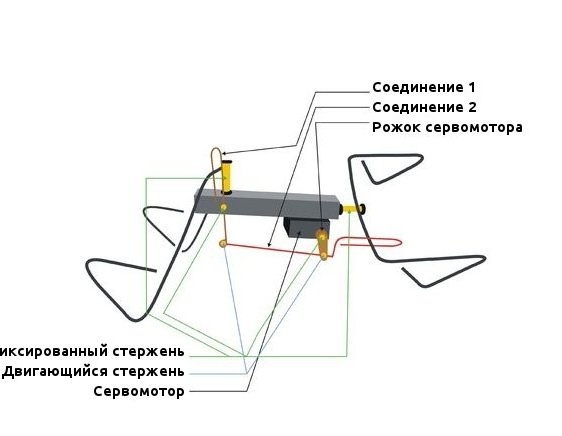
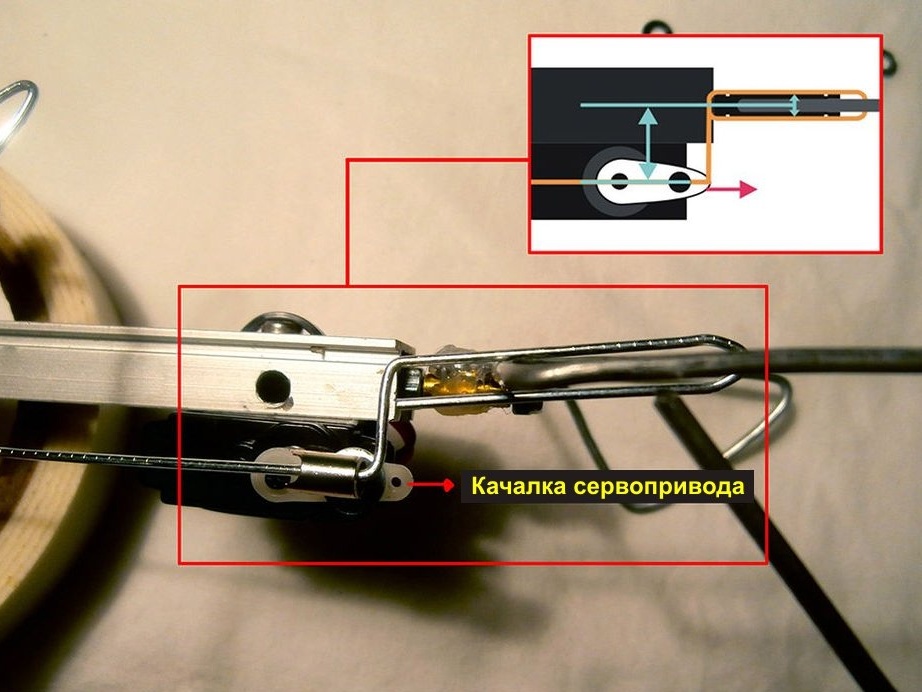
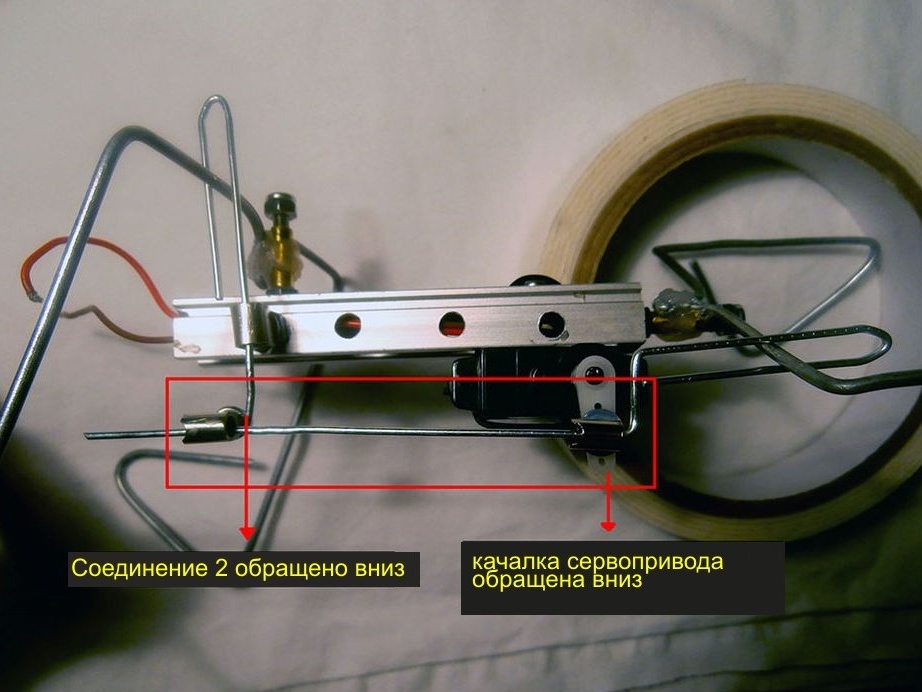
Steg 9: Koppling
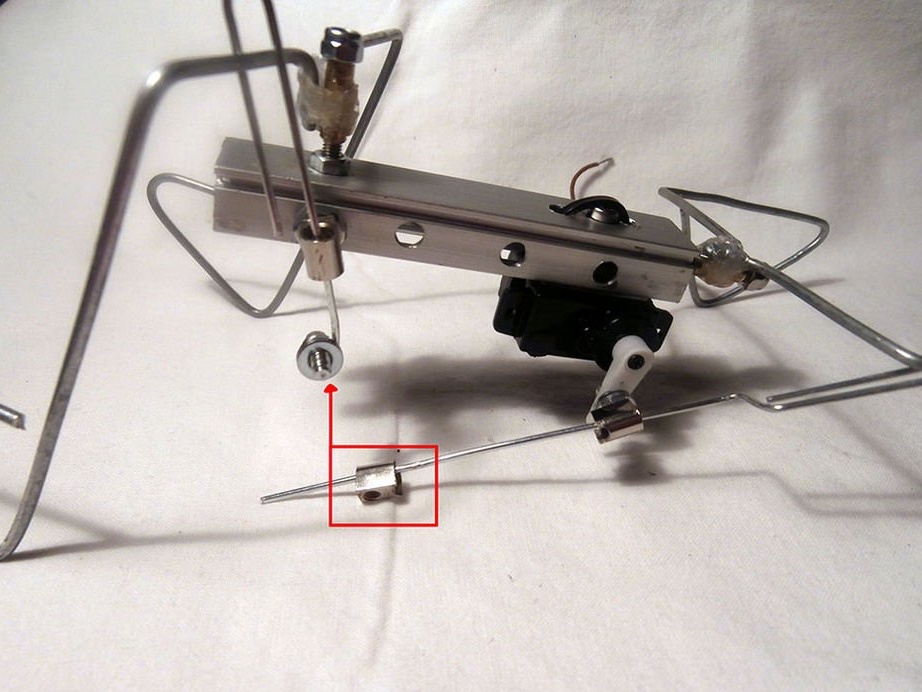
Steg 10: Koppling
Steg 11: sista handen
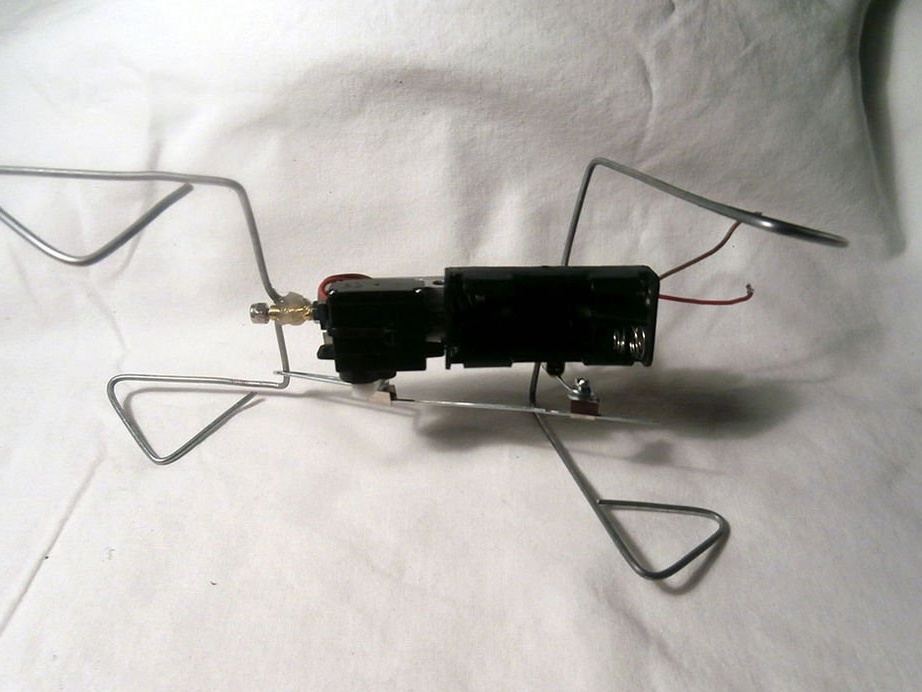
I slutändan, helt enkelt koppla servo och batterier, och roboten Uggla startar en resa runt ditt hem :)