

Roboten DIY kommer att vara en fantastisk leksak för barn, även med den kan du spela släktingar eller vänner. Kärnan i roboten är som följer. Det är en låda med en brytare. Så snart någon klickar på en strömbrytare på en låda, börjar en dörr öppnas, från vilken en hand kommer ut och sätter tillbaka omkopplaren till sitt ursprungliga tillstånd. Trots robotens externa enkelhet ser faktiskt allt detta ganska roligt ut.
Grunden för att skapa en robot är en krets Arduino. Det finns också några mekaniska element som kommer att diskuteras nedan. Låt oss överväga mer detaljerat hur kan gör det själv montera en sådan robot.
Material och verktyg för tillverkning:
- Arduino-styrelse, alla med PWM-utgångar kommer att göra;
- servomotorer, två delar (lämplig modellen Futaba - S3003, kraften hos en sådan motor räcker för att öppna dörren, enheten ger upp till 3,2 kg / cm kraft);
- batterier;
- switchstyp SPST eller SPTT;
- en omkopplare för att styra batteriets ström;
- du behöver en knapp för att starta om Arduino;
- Trådar, hoppare och andra små saker.

Dessutom behöver du dessutom en växellåda (lämplig för radiostyrda bilar), ett bräde för en elmotor som heter Arduino motorsköld, en RC servomotor. Dessa komponenter behövs för att få rutan att röra sig, som författaren.
För att sänka ljudnivån under drift av enheten behövs en kondensator av elektrolytisk typ med ett nominellt värde av 10 mF, ett 10K-motstånd och en 74HC04-inverter.
Tillverkningsprocessen för roboten:
Första steget. Hur man gör en låda
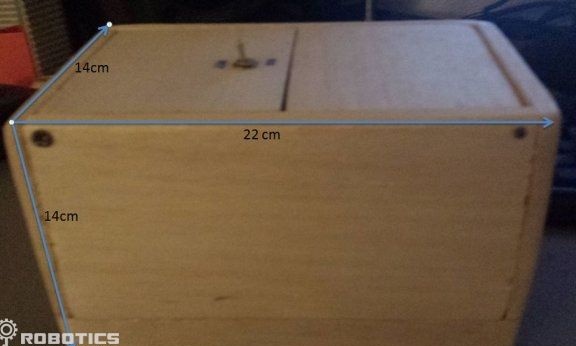
För att skapa en låda, det vill säga en robotkropp, måste du hitta plywood eller kork. Dessutom behöver du ett kraftfullt lim för limning av trä. Det är viktigt att förstå att ju mer strukturen väger desto mer energi kommer att förbrukas. När det gäller storleken på lådan är den 22 cm x 14 cm x 14 cm.
Steg två Schematiskt diagram elektronisk delar
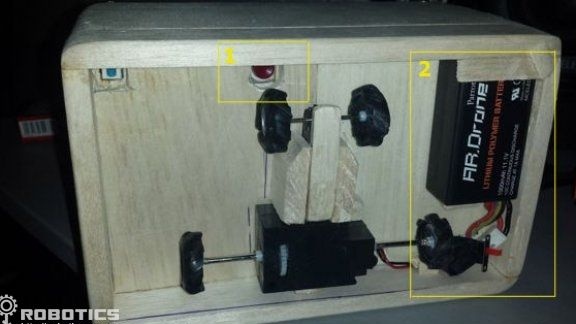
Den övre delen av roboten innehåller ett Arduino-huvudkort, två servon och en switch. När det gäller kretsen, som är ansvarig för mängden brus, kan den ersättas med ett vanligt motstånd.
Servo-enheter drivs genom den femte stiftet på Arduino-kortet. När det gäller signalledningarna är de anslutna till kontakterna 9 och 10. Tack vare dessa PWM-kontakter styrs servomotorns rotationsvinkel. Detta är en vinkel från 0 till 180 grader.
Den röda knappen behövs för att starta om Arduino.
Längst ner på kretsen är Arduino-motorskärmskortet.På brädet kan du se två kanaler, A och B, tack vare dem kan du, om så önskas, ansluta två motorer samtidigt. Huvuduppgiften för detta bräde är att med det kan du programmatiskt ställa in rotationshastighet, riktning, pauser för vilken motor som helst. Om du tittar på diagrammet används kanal B, medan kontakt 13 bestämmer riktningen, kontakt 11 är hastighet och kontakt 8 används för att styra bromsarna.
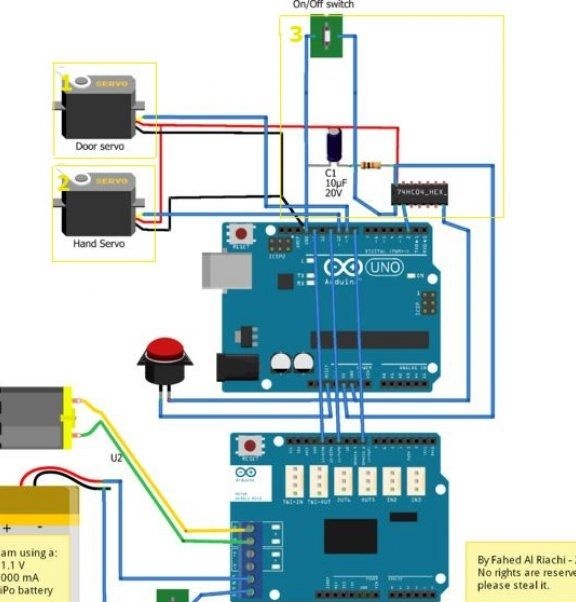
Strömkällan är ett 11,1 / 1000 mA-batteri, det ansluts till Arduino-motorskärmskortet. Om det inte kommer att användas, är batteriet direkt anslutet till huvudkortet.
Steg tre Motorinstallation
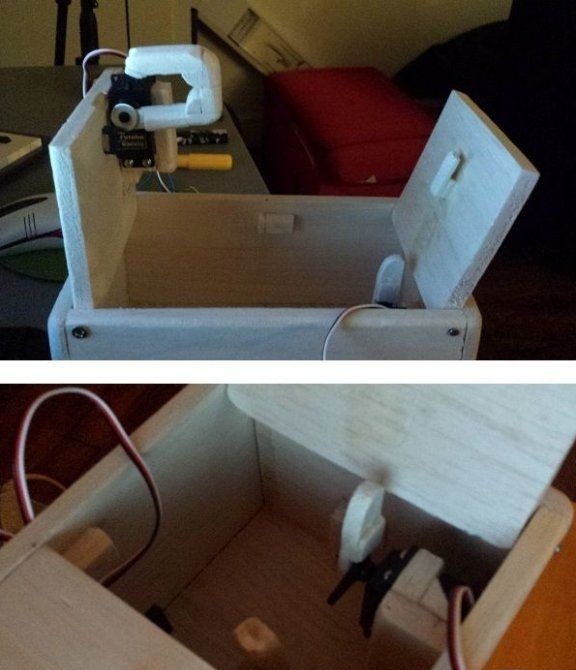
Servomotorn och händerna installeras experimentellt, du måste i praktiken kontrollera om mekaniken fungerar korrekt. För att kontrollera motorernas avvikelsesradie kan du använda Arduino IDE-programmet.
För tillverkning av händer tagna trä av alla slag. Det viktigaste är att det är lätt, eftersom annars kommer energiförbrukningen att öka. När det gäller storleken på handen, justeras den under installationen, välj önskad längd, den önskade effekten uppnås.
Täckskyddet och handen är monterade så att de inte vidrör servomotorn under drift.
Steg fyra Vi ansluter servomotorn och byter till Arduino
Med trådar och hoppare måste du ansluta alla elektroniska element till varandra enligt det angivna schemat. Ledningarna måste läggas så att de inte stör de rörliga elementen i roboten.
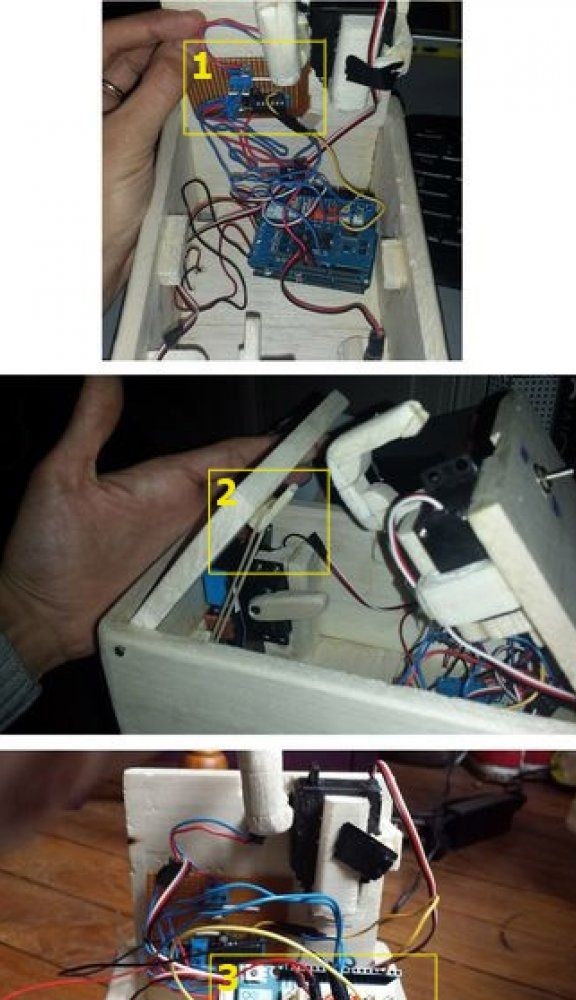
Under nummer 1 kan du se hur den är ansluten och var kopplingskretsen är belägen. Nummer 2 markerar ett sådant element som ett elastiskt band, det behövs för att dörren ska öppna med viss spänning. Nummer 3 anger motorskölden installerad på Arduino.
Steg fem Installation av den mekaniska delen för att flytta lådan
Längst ner i lådan finns ett batteri, en motor med hjul, en växellåda, en återställningsknapp och en vippbrytare för att kontrollera robotens kraft. Innan du sätter på elementen måste du beräkna balansen i lådans vikt. För att roboten ska vara stabil, utöver den främre axeln, installeras ytterligare en.
Steg sex En annan funktion
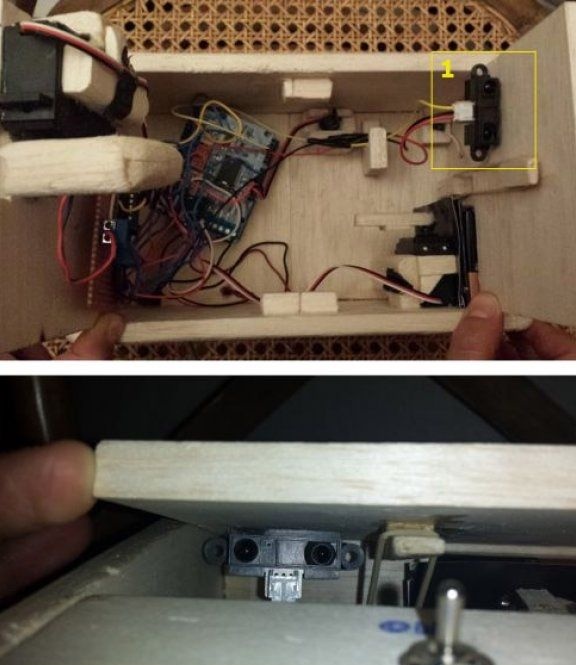
För att roboten ska bestämma rörelseriktningen kan den utrustas med en IR-sensor. Samtidigt, när någon försöker röra på vippbrytaren, kommer rutan att röra sig åt höger och vänster. För dessa ändamål är GP2Y0A21-sensorn lämplig, den har tre ledningar. Gul måste vara ansluten till den tredje stiftet av Arduino, röd till stift 5 och svart till marken.
Det är allt, en enkel och samtidigt rolig robot är redo. En sådan leksak kommer att ge glädje inte bara för barnet, utan också överraska många vuxna.
firmware: