
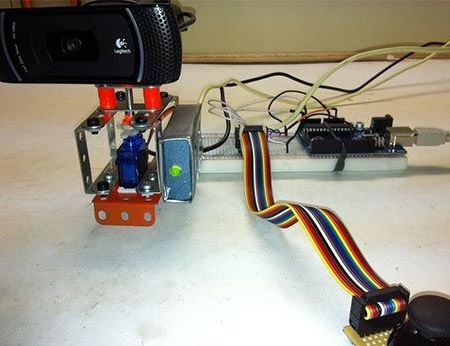
Den här artikeln talar om hur du använder Arduino kan kontrollera webbkameran. Mer exakt kommer kontrollen att vara en servo-enhet, som är installerad i ramen från designern på vilken webbkameran redan är monterad.
Material som används av författaren för att skapa den här enheten:
1) metallkonstruktör
2) kallsvetsning
3) webbkamera
4) servo
5) lysdioder
6) Arduino
8) joystick från PS3
Överväg mer detaljerat designen och huvudpunkterna för att skapa en enhet för att styra kameran.
Förundrad över frågan om hur man använder en så bekväm Arduino-plattform förutom standardfunktioner som blinkande lampor. När en samtal hade gått via Skype med en kollega på jobbet, kom författaren med en intressant idé. Tänk om du ger hans kollegor möjlighet att kontrollera en webbkamera och titta på vad som händer på kontoret. Inte tidigare sagt än gjort, och författaren började arbeta med implementeringen av denna idé.
Ursprungligen studerade författaren de viktigaste materialen i artiklar där en styrspak användes för att styra enheter skapade på Arduino-plattformen. Efter att ha förstått materialet i dessa artiklar insåg författaren att han kunde använda den gamla styrspaken från PS3 för att kontrollera rörelserna från servon från honom.
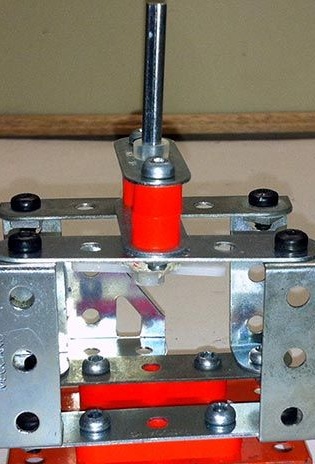
Börjar bygga, beslutade författaren att bygga en ram där servomotorn och själva kameran kommer att placeras. För att inte komplicera uppgiften beslutade författaren att använda den vanliga metallkonstruktören, som han köpte i en sparsamhetsaffär.
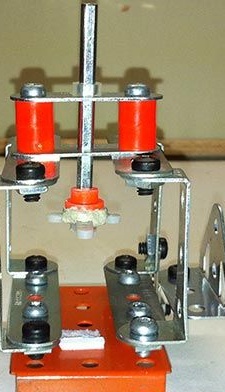
Med konstruktörens detaljer visade det sig skapa en sådan ram för den framtida enheten:
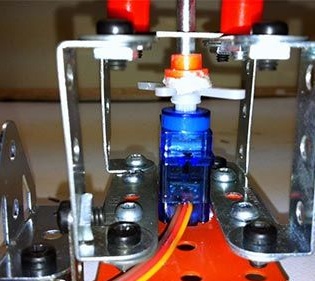
En servo-enhet installerades inuti ramen. Som framgår av fotot passar det perfekt i den skapade ramen. För att fixa servot på ramen använde författaren dubbelsidig tejp. Med kallsvetsning anslöts servoaxeln till växeln, som styr plattformens rörelse med kameran.
Det är viktigt att se till att transmissionskonstruktionen görs även så att det inte finns onödig belastning.
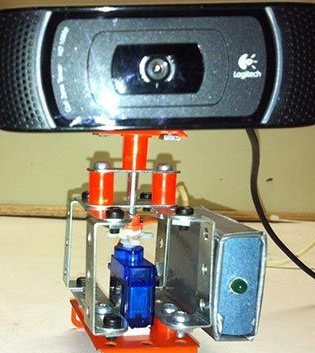
Sedan började författaren att installera webbkameran. En Logitech-kamera användes, som används på kontoret för företaget där författaren arbetar. Därför, på grund av det faktum att kameran inte tillhör författaren, demonterade han inte den och tog bort motvikten, även om detta skulle förenkla utformningen av den framtida enheten.

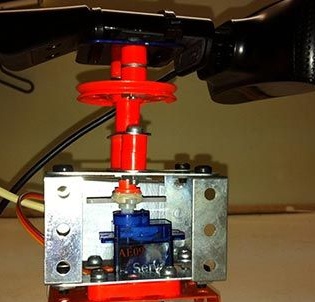
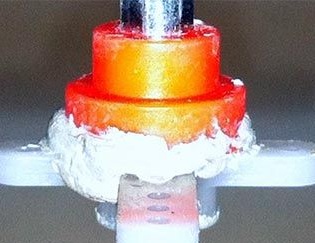
För att på något sätt kompensera kamerans vikt och fördela den i mitten av strukturen, använde författaren 2 tjocka packningar. De låter dig flytta kammarens vikt från servoaxeln till huvudramen och undviker också trycket på axeln på själva kammaren.
Kameran är monterad på en speciell rund plattform, som är baserad på en axel som kommer från servodrivaren. På detta sätt realiseras kamerastyrning med hjälp av en korsöverföring.
Efter att den mekaniska delen av strukturen var klar tog upp författaren den elektronisk fyllning.
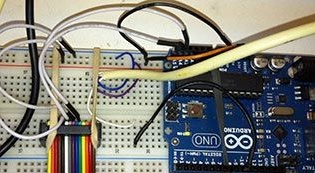
Till att börja med bestämde han sig för att ansluta servon och lysdioder som visar systemets status.
Servon i sig har tre ledningar: -GND, + 5V och Signal. Författaren använde 9 stift för att inse förmågan att styra enheten. För att göra en drivenhetsindikator installerade författaren en diod som är ansluten till två ledningar: + 5V och GND med ett motstånd på linjen + 5V.

Sedan, baserat på artiklar på Internet, förberedde författaren en trasig joystick från PS3 för att kontrollera enheten.

Sedan plockade författaren upp ett program för Arduino, tack vare vilket det blir möjligt att använda joysticken och USB-porten för att styra servon. För att kommunicera med en USB-port använde författaren modemkontroll och en applikationsterminalemulator som Minicom eller Putty.
Detta program har flera funktioner för att styra kameran.
För att installera kameran i mitten 90 grader, måste du trycka på "m", kameran kommer också automatiskt till detta läge när servomotorn är på. För att rotera kameran åt vänster, tryck på “F” -tangenten och genom att trycka på “J” -knappen roteras kameran åt höger.
Du kan ladda ner programmet i slutet av artikeln.
Eftersom författaren inte särskilt beräknade designen för kamerarotationsanordningen, började den ha ett antal nackdelar.
Till exempel: eftersom kameran inte är fixerad i ramen, när den lutas, kan den falla från plattformen; eftersom servo är ganska liten, skapar kamerans vridmoment ytterligare rotation, vilket i sin tur deformerar servo; hålen för servoaxeln är för stora, så den är inte statisk och utsätts också för stress.
Därför vill författaren i framtiden uppgradera enheten på följande sätt: se till att kamerarotationen styrs av joystickens pilar och inte av knapparna; lättare lasten på servo vid kurv.