


Material och verktyg för montering:
- roterande styrenhet;
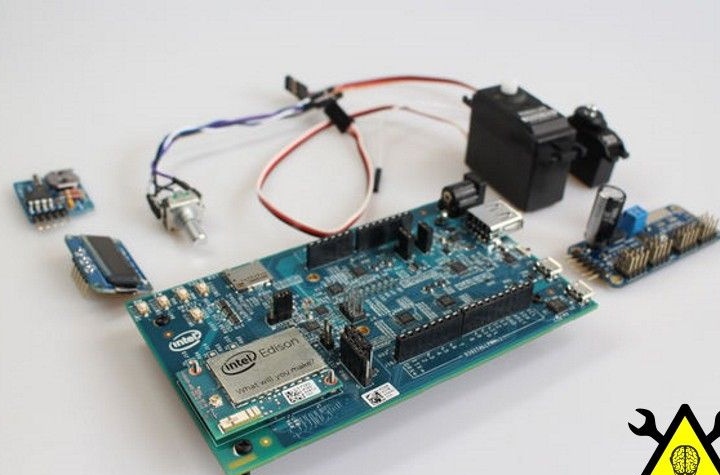
- Intel Edison med Arduino Breakout Board
- I2C PWM-drivrutin;
- realtidsklocka
- mini I2C OLED;
- två servor;
- Tre servor med metallväxlar;
- två ledningar för en servodrift 30 cm lång;
- monteringsuttag för kontakt;
- Växelomkopplare med två lägen;
- borste och tandkräm;
- strömförsörjning för 5V 3A;
- en plastspruta;
- muttrar och skruvar;
- mutter och gängad stång;
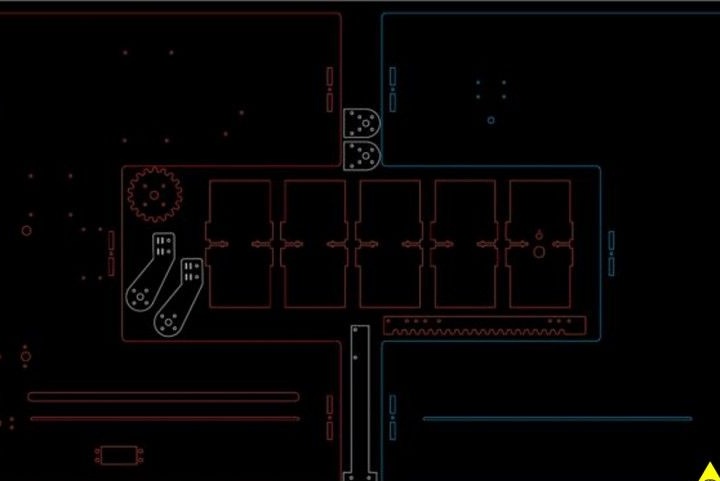
- en bit transparent akryl som mäter 61 cm x 61 cm x 3 mm;
- kryssfaner som mäter 91 cm x 61 cm x 6 mm;
- 3D-skrivare.
Robotmonteringsprocess:
Första steget. Mekanisk del
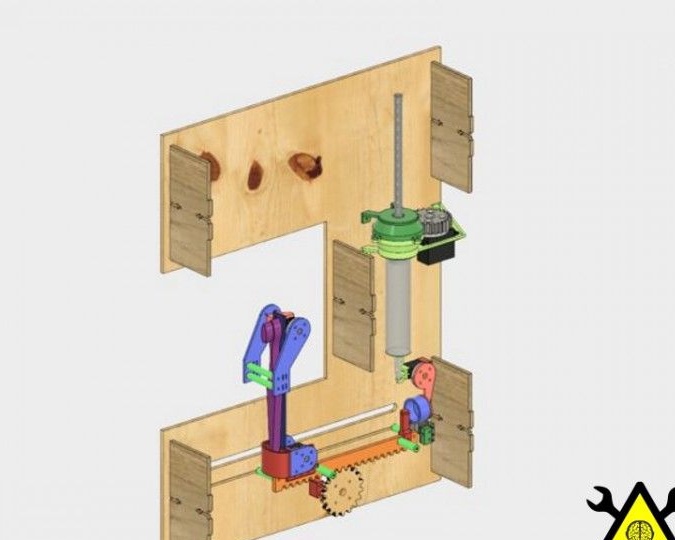
Enheten modellerades först med en kombination av Fusion 360 och Illustrator. Under processen skapades en hel teknik, som inkluderar 3D-utskrift, samt laserskärning av metall. Totalt kan systemet delas upp i fyra huvudnoder. Detta inkluderar en vagn, en tandborsthållare, en huvuddel och en dispenser.
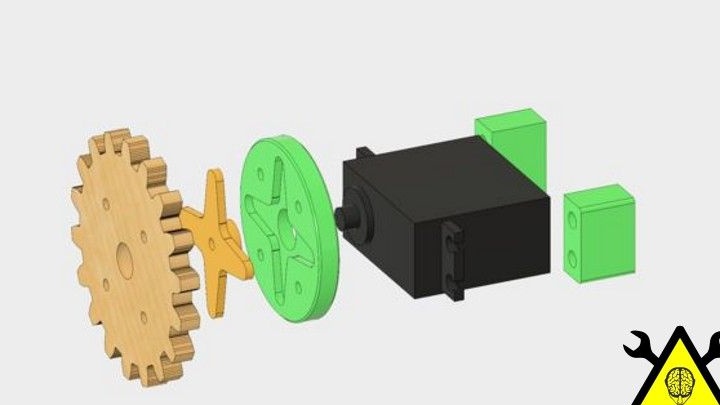
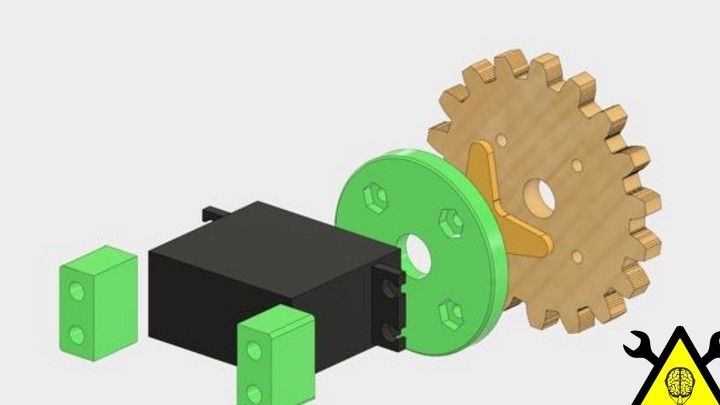
För att hemmagjorda produkter skulle kunna användas för större behov beslutades att modellera adaptrar för standard- och mikroservos. Dessa adaptrar har spår för att fästa standardaxlar, samt utrymme för fyra muttrar på baksidan. På grund av det faktum att adaptrarna var designade för axlar måste de fästas antingen på plattorna eller på andra föremål.

Steg två Enhetens elektriska krets
En 5V- och 3A-källa används som ström. Detta räcker för att driva en motor. När det gäller huvudkortet förbrukar den cirka 500 mA, och motordrivarna, den ursprungliga lysdioden och realtidsklockan förbrukar en liten mängd ström.
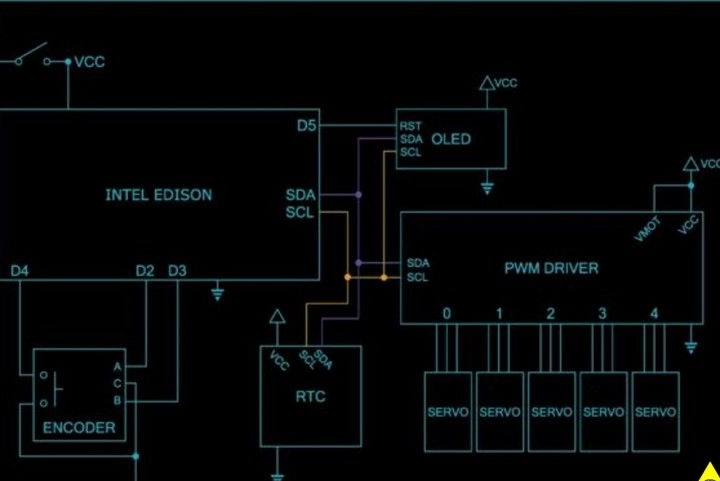
Intel Edison-processorn används som huvudkontroller för systemet. På grund av avskiljningen av korten kan processorn enkelt kommunicera med andra komponenter i elektroniken. Kortet ansluts till motor, klocka och skärm.
För att styra de fem servon används ett PWM-kort. Motorns kraft kan styras med en extern källa, men författaren bestämde sig för att knyta Vmot till VCC-stiftet.Tack vare detta drivs hela systemet av 5V.
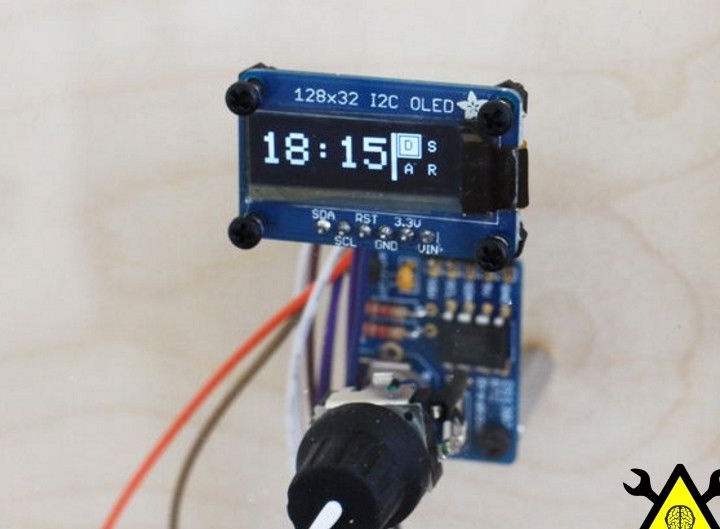
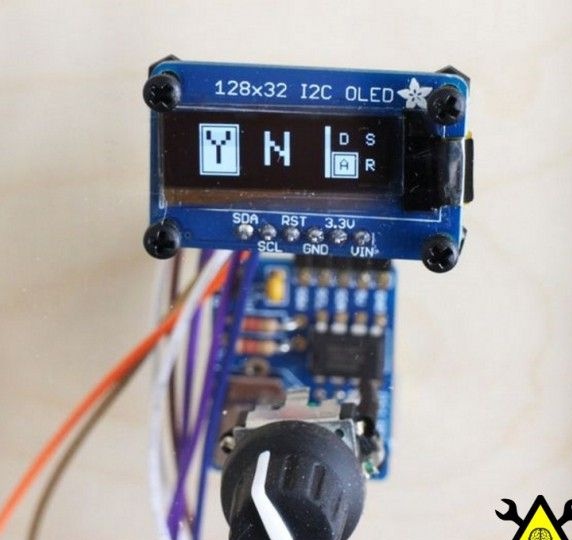
Så att enheten kan styras, används en liten skärm på 128 x 32. En rotationssensor fungerar som huvudanvändarens ingång. Sensorns utgångar är anslutna till processorens digitala kontakter.
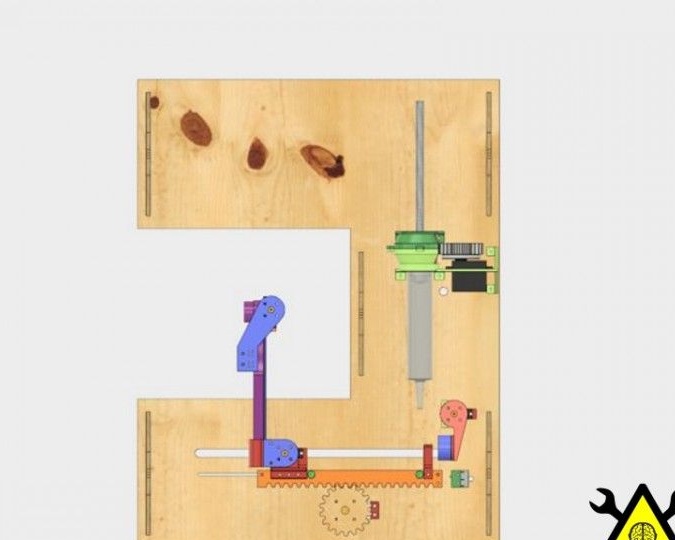
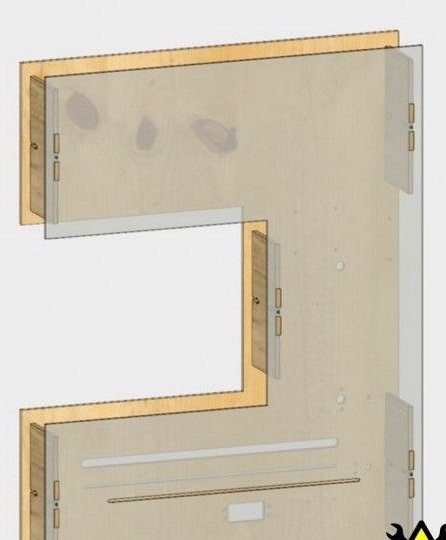
Steg tre Kroppsmontering
Den bakre delen fungerar som stöd för etui, den är tillverkad av plywood med en tjocklek av 6 mm. Fyra skruvar används för att säkra PWM och processor. Edison är monterad på framsidan och PWM på baksidan.
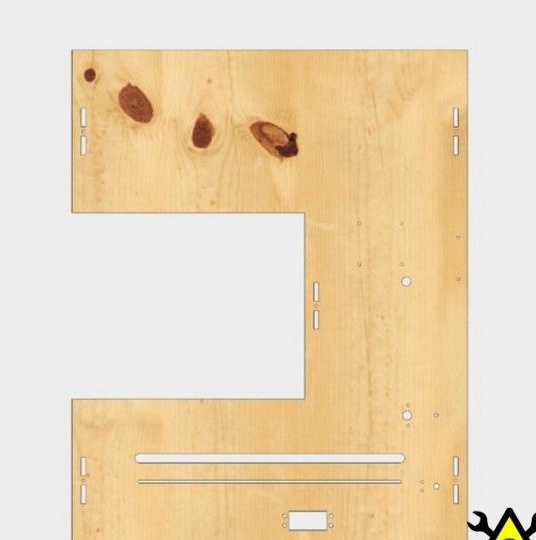
Fem distansplattor används för att ansluta fram- och bakpanelerna. Avstånden fästs på plattorna med skruvar och lämpliga muttrar. Plattorna är nästan symmetriska, men utsprången på ena kanten är kortare, de sträcker sig inte framåt. Strömställaren, tillsammans med strömkontakten, är ansluten till den nedre fjäderbenet.

Vad gäller frontpanelen behövs det främst för att skydda enheten under drift. Fyra skruvar används för att säkra skärmen, den roterande sensorn är också monterad med muttrar.
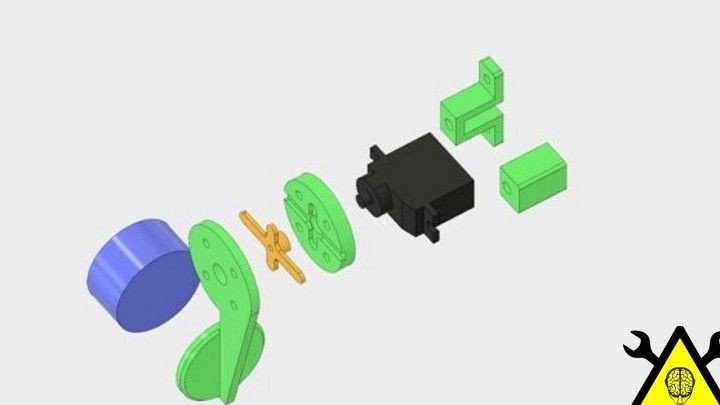
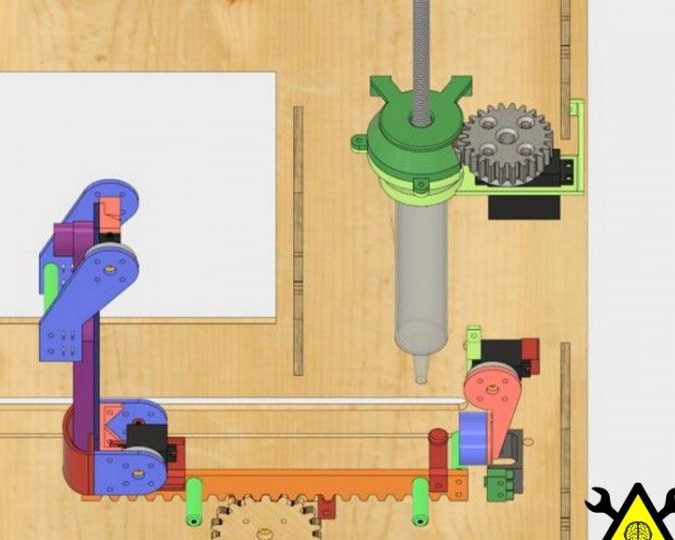
Steg fyra Tandborstfästet
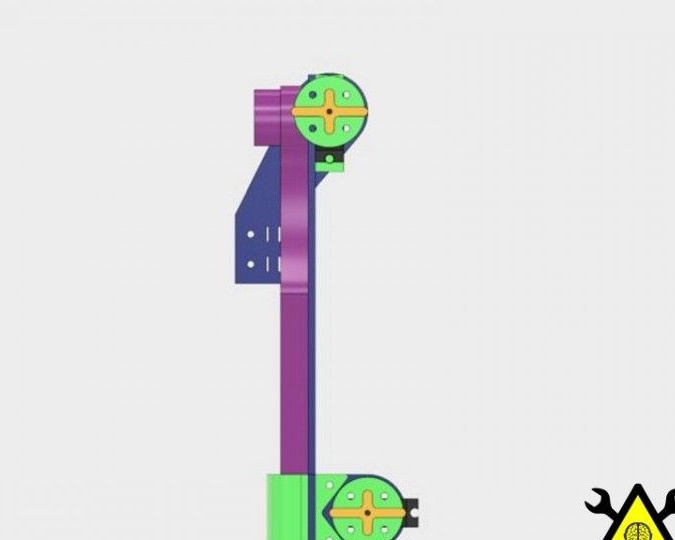
Det finns två servon på tandborsthållaren, som drivs av komponenterna - basen och "huvudet". På bilden kan du se elementen i blått och grönt. Det som klipptes med en laserskärare är färgat blått och element som skrivs ut på en 3D-skrivare är gröna.

Tack vare huvudet faller inte tandborsten. Händerna drivs av en enda servodrift, de är fästa med två packningar. En 3D-adapter och två skruvar används för att fästa servomotorn på huvudplattan. Det finns fyra luckor i plattan, genom dem med hjälp av svarta gummiband är en tandborste fäst.
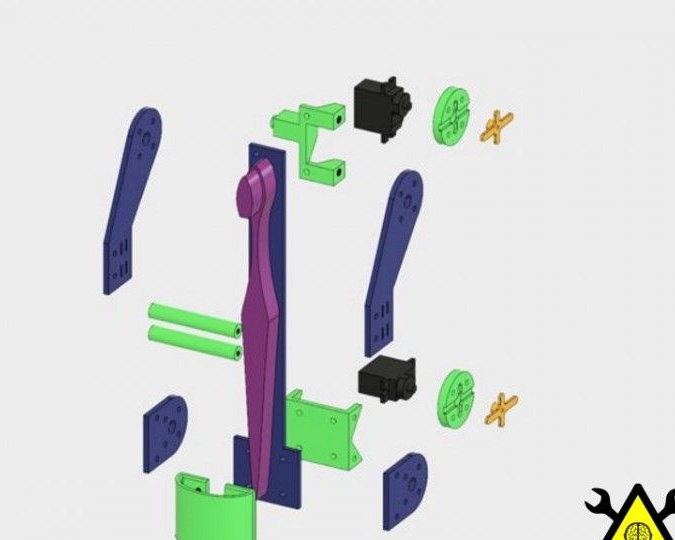
Basen är en liten 3D-kopp som håller borsten från att falla. När tandborsten har laddats i enheten håller servodrivaren i den och svänger ner. Åtta skruvar används för att ansluta plattorna.


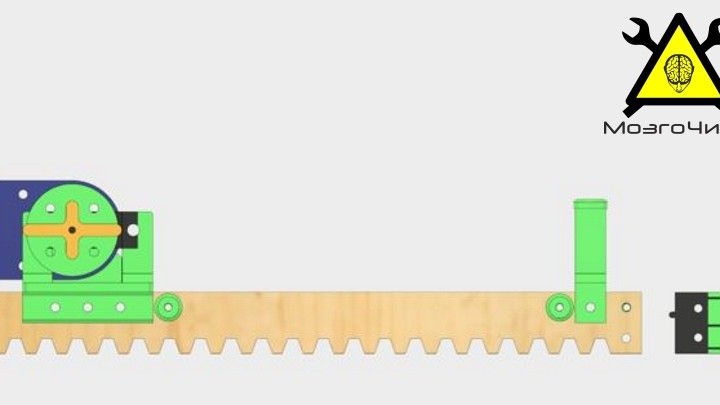
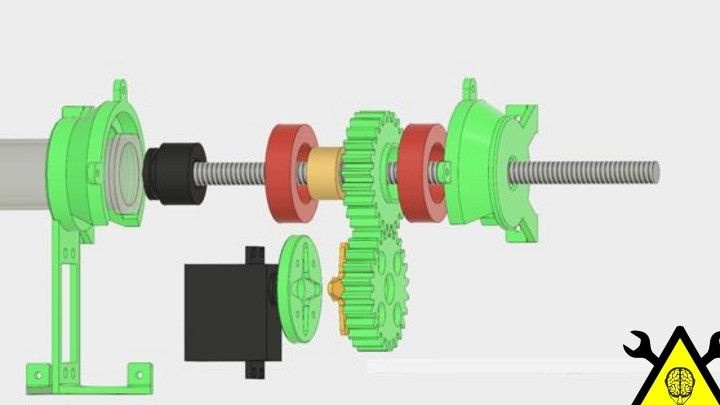
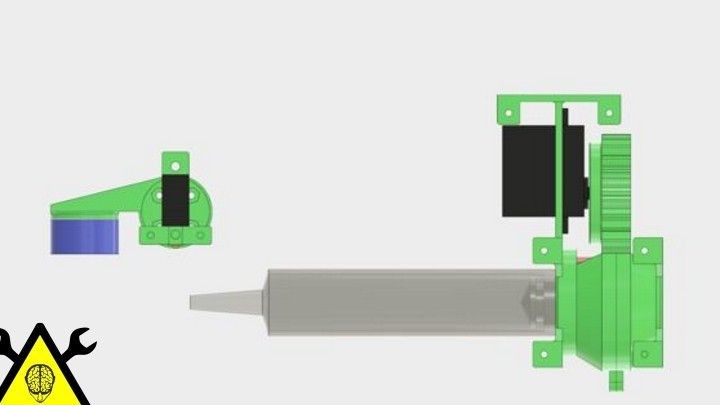
Steg fem Rälsmontering
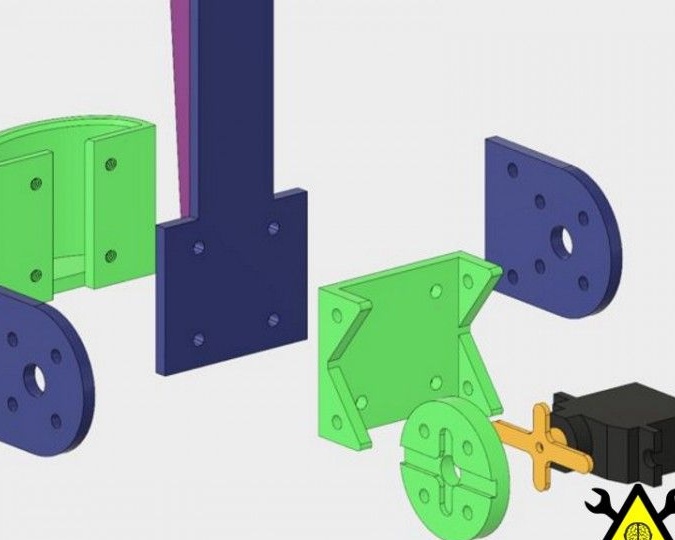
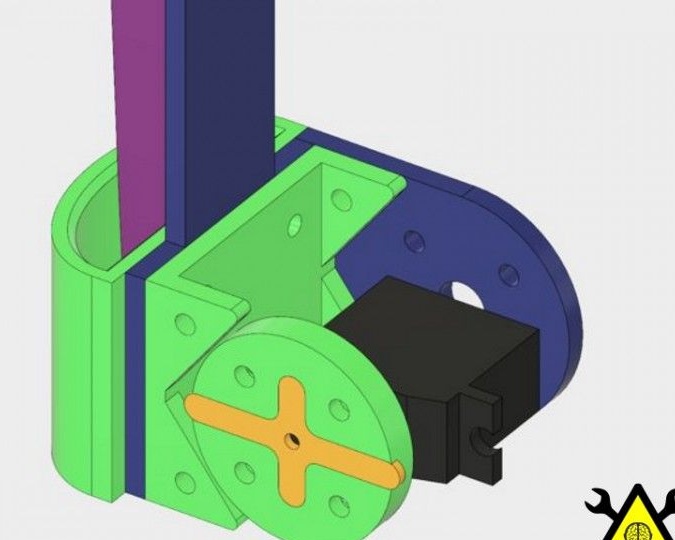
Ramen består av tre unika delar, detta är en nackstöd, vagn och stag. Med vagnen är ramhållaren fäst. Själva vagnen är fäst med tre skruvar. Nackstödet behövs för att minska belastningen på huvudservohållaren, den är monterad vidare på ramen.
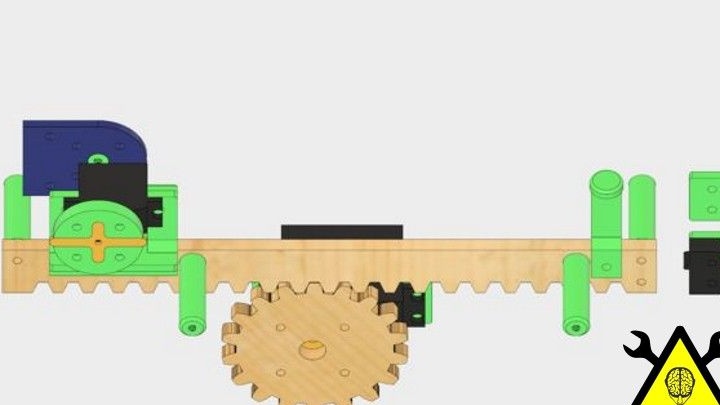
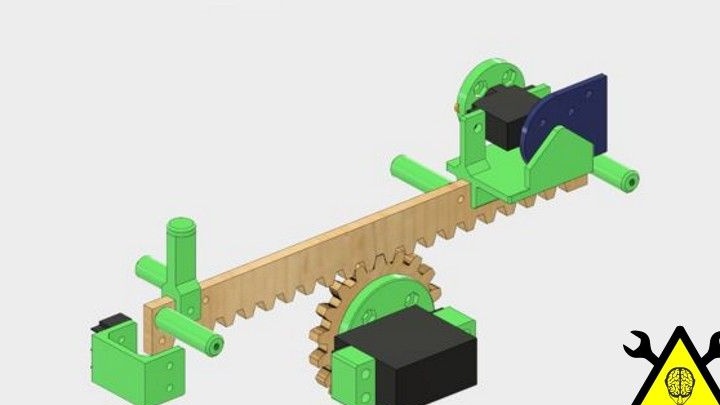
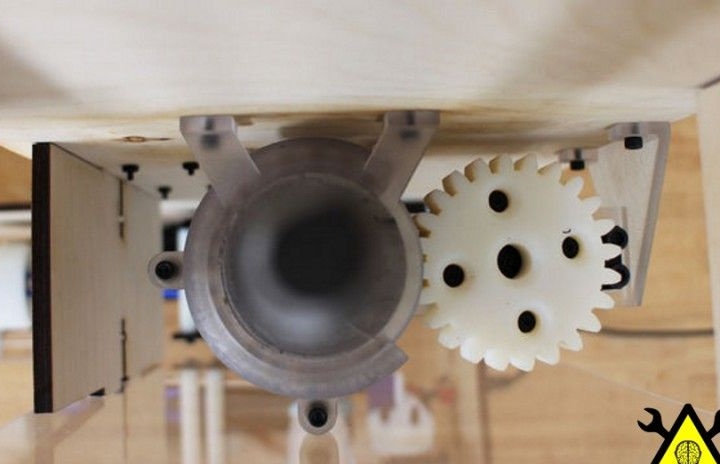
Växeln är monterad under ramen. Den är klippt ur plywood med 6 mm tjocklek och fästs på en standard servoaxel. Selve servodrivaren är placerad något förskjuten från basplattan, i samband med detta finns det identiska rektangulära stagar på den. Servo själv är fäst på basen med fyra skruvar.
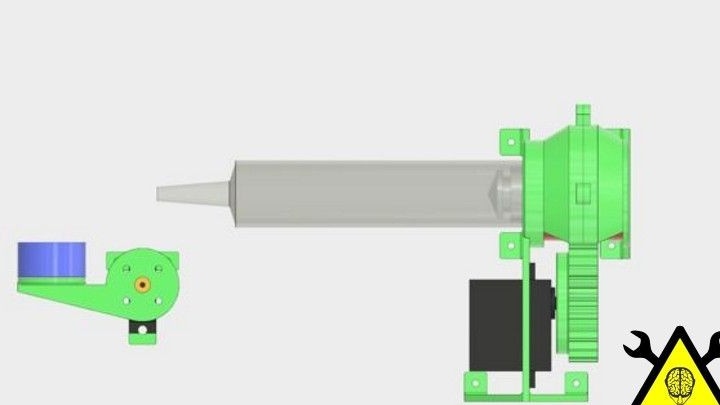
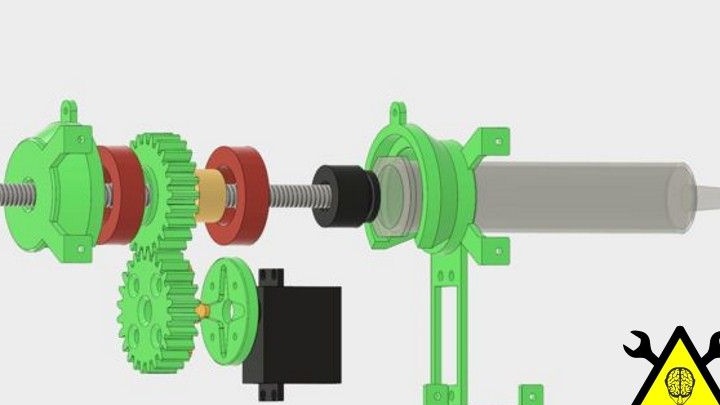
Steg sex Montering av dispensern
Den mest komplexa mekanismen i enheten är en linjär enhet. Tack vare honom inträffar pastans dosering. Kärnan i anordningen är en gängad stång och en mutter, med hjälp av detta är röret komprimerat. Sex skruvar används för att säkra enheten.
Sjunde steget. programvara
Totalt har programmet tre funktioner: inställning av tid, inställning av "larm" och även funktionen för att starta enheten.
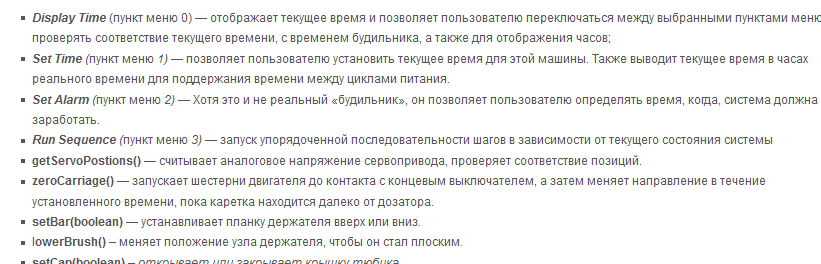
Allt är det efter att ha blinkat och konfigurerat enheten är klar för användning.