


Jag tog del av min design från Lego Technic 42049 monteringsinstruktioner, resten är min improvisation. För hantering kommer jag att använda en Bluetooth-modul ansluten till en Android-enhet eller dator.
Så vi behöver:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- 2 L9110S-drivrutiner
- 1 servodrift SG-90
- Bluetooth-modul HC-05 eller motsvarande
- USB-UART för arduino firmware
- Mini växelmotor 50 varv / minut
- Mini motorväxellåda 100 varv / min
- Motorväxellåda 6v 150 varv / minut
- 2 lysdioder
- 2 motstånd 150 ohm
- Kondensator 10v 1000uF
- 2 enkra radskammar PLS-40
- Induktor 68mkGn
- 6 NI-Mn 1,2v 1000mA-batterier
- Anslutning pappa-mamma två stift till tråd
- Homutik
- Trådar i olika färger
- lödning
- Rosin
- lödkolv
- Bultar 3x20, muttrar och brickor för dem
- Bultar 3x40
- Bultar 3x60
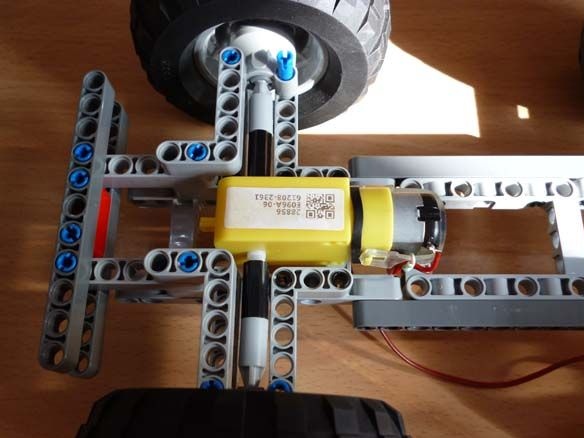
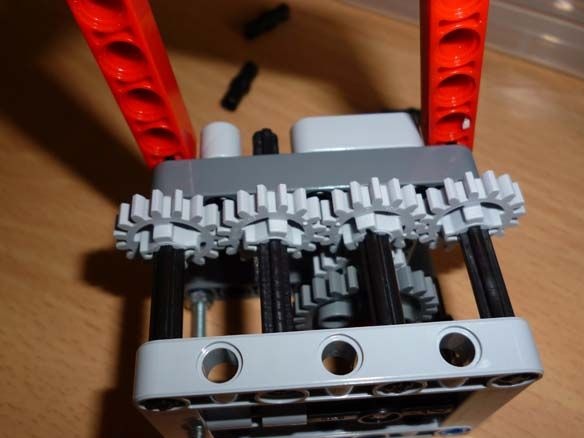
Steg 1 Bakaxelmontering
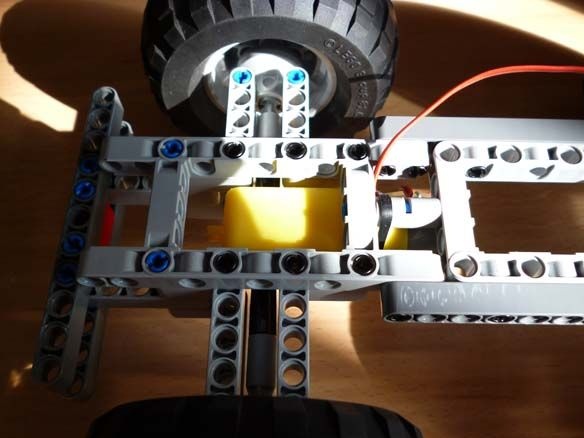
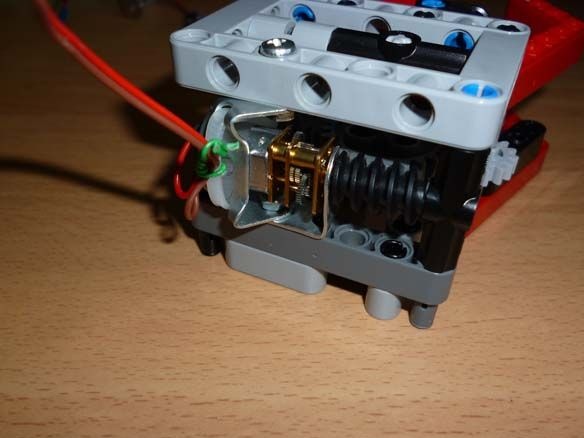
För rörelse kommer vi att använda en växelmotor med en 6-voltsmotor med en varv på 150 varv / minut. Växellådans axel måste skäras från båda sidor och läggas på legodelar. Bakaxeln monteras enligt följande:
Och på baksidan:
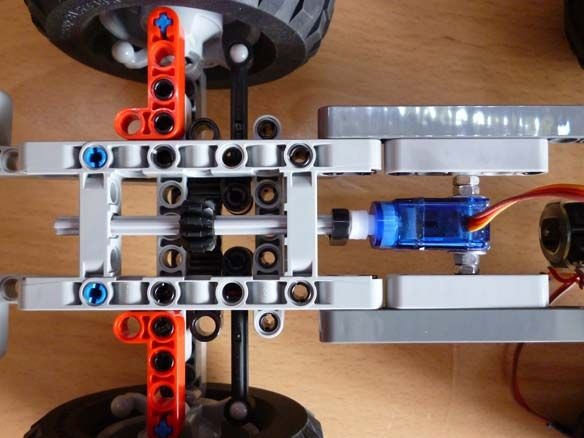
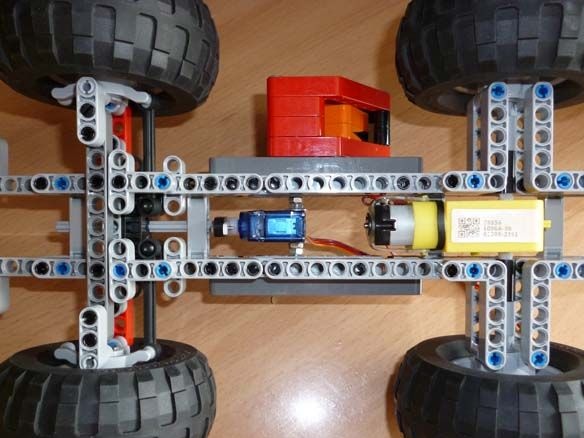
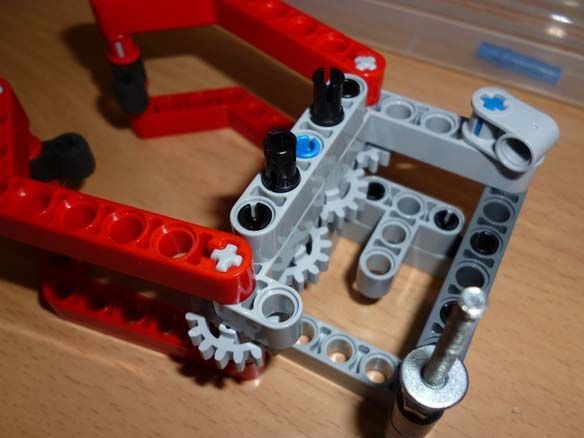
Steg 2 Montering av framaxeln
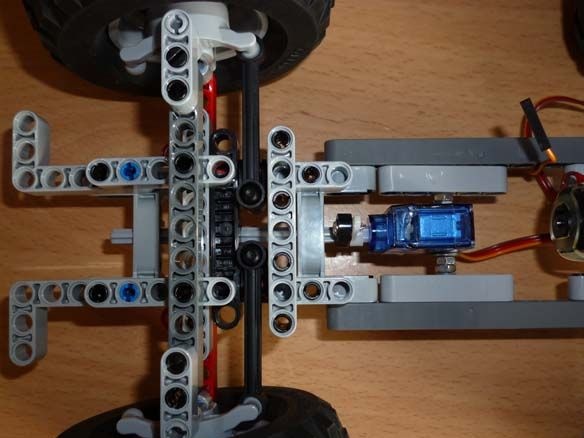
För hjulets rotation är SG-90 servo väl lämpad. För att fixa den på vår modell är det nödvändigt att borra noggrant för att inte röra vid de inre delarna av servo, ett genomgående hål med en diameter på 3,2 mm eller bara klippa med en papperskniv. Och skär även de utskjutande delarna ("vingar" för fästning). Vi sätter in en bult i det gjorda hålet och fixerar det med muttrar. På servoaxeln satte vi på en spak med en skruvad del från lego:

Och på baksidan:
Steg 3 Montering av bas och hytt
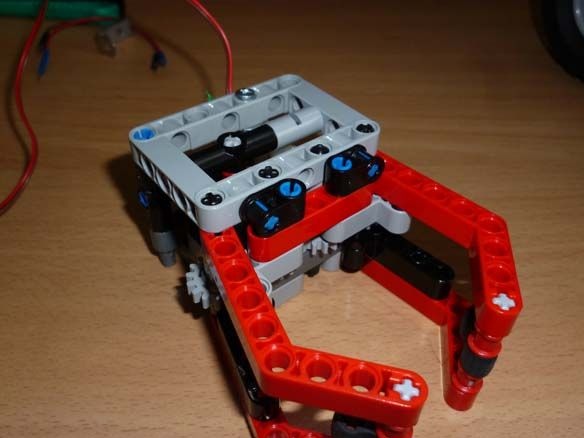
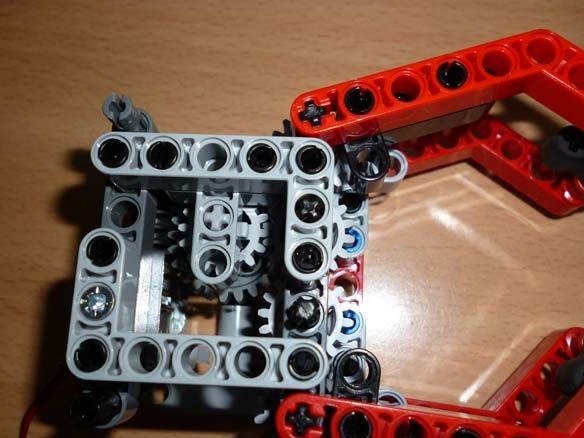
Vi ansluter båda broarna som visas på bilden:

Vi monterar kabinen (behövs för skönhet):
Vi sätter stugan på grundval av:

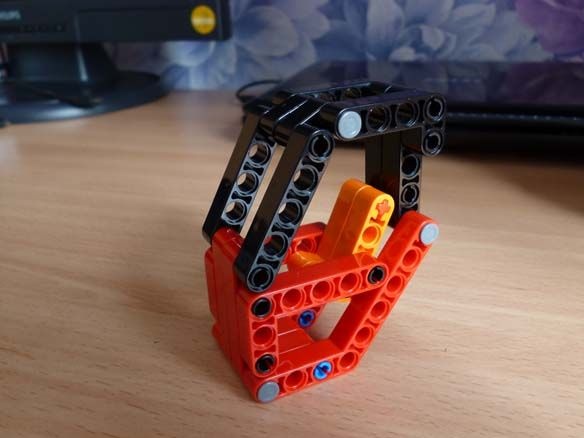
Steg 4 Sätta ett mössa eller en klö
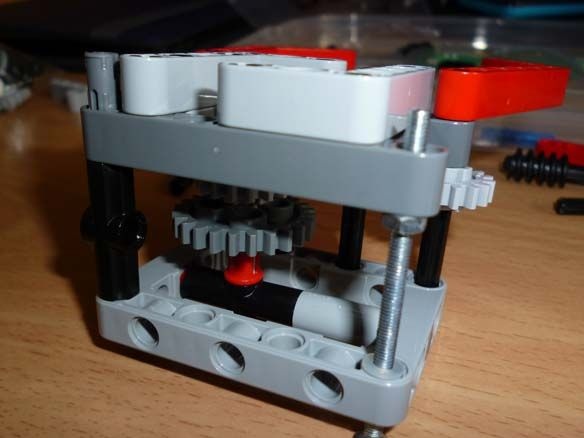
Kluren drivs av en minymotorväxellåda med en hastighet av 50 varv / minut. Jag löste problemet med att ansluta växelmotorn till designerns delar på följande sätt: Jag satte en anslutningshylsa på växelmotoraxeln och satte in ett skrot av en tändsticka för fixering. För montering använde växelmotorn metallplast från en järndesigner och en klämma. Det visade sig följande:

Därefter samlar vi in själva klo från bilden:

Vi fixar det till basen:
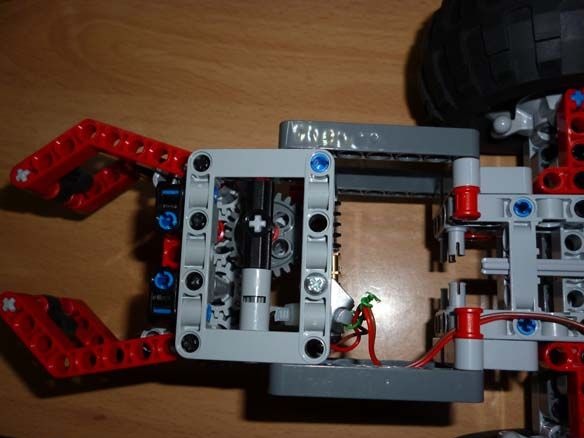

En minimotorväxellåda med en hastighet på 100 varv / minut passar för att lyfta en klor:


Steg 5 Elektriker
För kontroll kommer vi att använda Arduino Pro Mini och Bluetooth-modulen. Motordrivrutiner behövs för att ansluta motorerna.
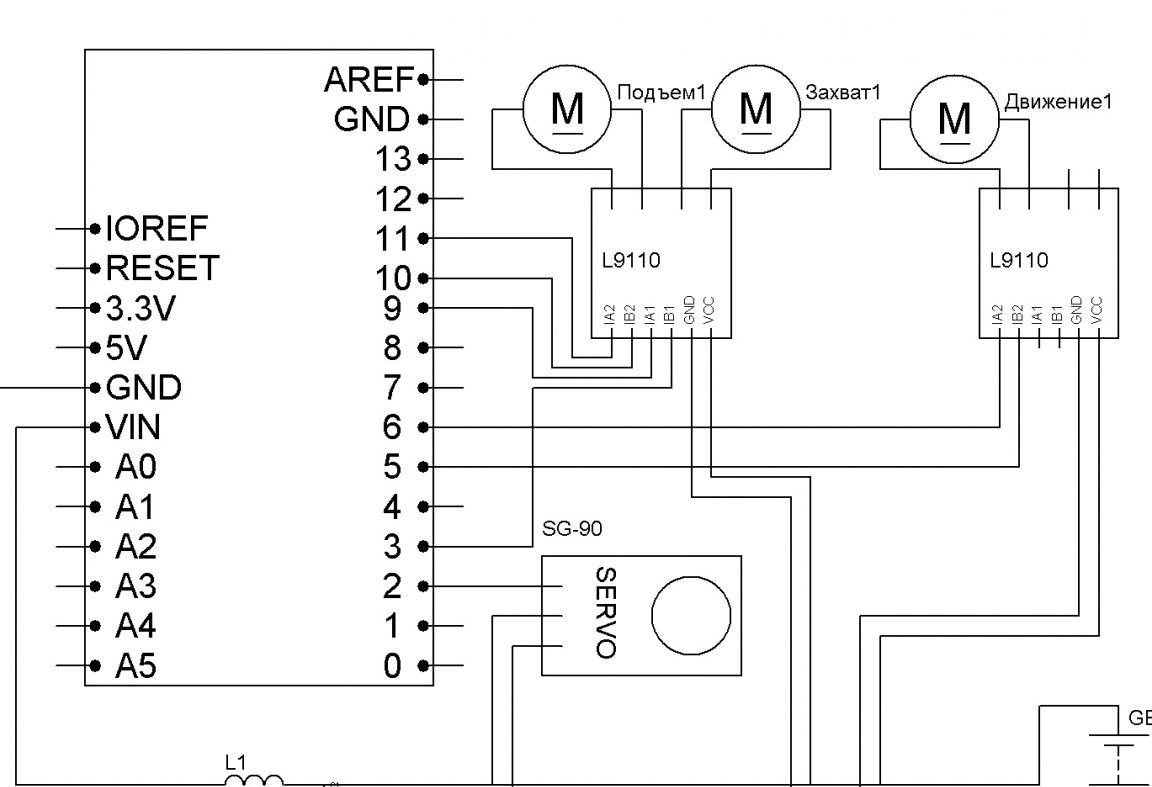
Anslutning av alla komponenter med Dupont-moder-till-moderkablar.Ström - 6 NI-Mn 1,2v 1000mA-batterier anslutna i serie. En kondensator för låg effekt, en induktor som du också hittar, du behöver stabilisera mikrokontrollerns kraft. Anoderna för de två lysdioderna är anslutna till 4 stift arduino, katoderna till GND. Motstånd väljs för lysdioderna som används. För enkelhets skull rullar du batterierna med tejp.

Vi limmar allt på en dubbelsidig tejp baserat på:

Steg 6 Bluetooth-installation
De mest prisvärda Bluetooth-modulerna idag är HC-05 och HC-06. De finns gott om i kinesiska onlinebutiker. Skillnaderna mellan dem är att de första kan fungera både i masterläge (slav) och i slavläge (master). Den andra är en rent slavenhet. Med andra ord, HC-06 kan inte upptäcka en parad enhet och upprätta en anslutning med den, den kan bara lyda befälhavaren.
Korta egenskaper hos modulerna:
- Bluetooth-chip - BC417143 tillverkad av
- kommunikationsprotokoll - Bluetooth-specifikation v2.0 + EDR;
- handlingsradie - upp till 10 meter (effektnivå 2);
- Kompatibel med alla Bluetooth-adaptrar som stöder SPP;
- Mängden flashminne (för att lagra firmware och inställningar) - 8 Mbit;
- frekvensen för radiosignalen - 2,40 .. 2,48 GHz;
- värdgränssnitt - USB 1.1 / 2.0 eller UART;
- strömförbrukning - strömmen under kommunikationen är 30-40 mA. Det genomsnittliga nuvarande värdet är cirka 25 mA. När anslutningen har upprättats är den förbrukade strömmen 8 mA. Det finns inget viloläge.
Vanligtvis säljs moduler som två brädor lödda tillsammans. Den mindre är en fabriksmodul som används allmänt i olika elektronisk enheter. Stor - en speciell brödskiva för DIY. Det ser ut som ett mindre kort med ett BC417-chip:

Och så gör DIY-modulerna HC-05 och HC-06 själva:
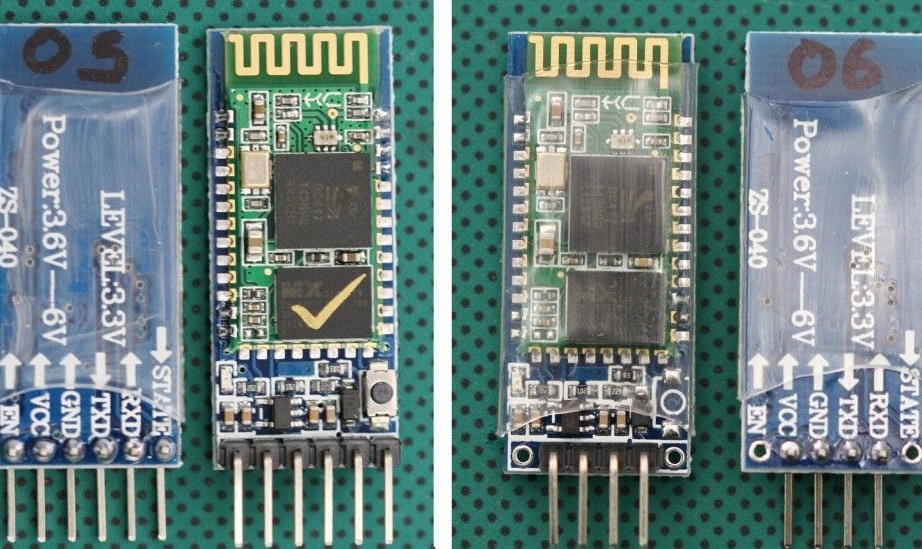
I princip kan du använda vilken modul du vill. En modul utan brödskiva kostar mindre, men då måste du ta hand om 3,3 V-strömförsörjningen för modulen och plåga dig själv genom att lödtrådar till modulen. Jag valde det bästa, enligt min mening, i pris / funktionskvoten HC-06.
Vi ansluter enligt följande:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
För korrekt drift måste modulen konfigureras. Vi konfigurerar AT-kommandon som anges i terminalfönstret. Jag ger ett exempel på installation av HC-05-modulen. Om du har en annan inställning kan det vara annorlunda. För att vår modul ska få kommandon, blinkar vi först Arduino med följande firmware:
I det här fallet fungerar Arduino som en bro mellan datorer och modulen. I firmware använder jag SoftwareSerial-biblioteket. Vid höga hastigheter fungerar det instabilt. Om du vill ha hög hastighet kan du ansluta modulen direkt till Arduino RX- och TX-kontakter och skriva om firmware. Men i mitt fall kommer vi att arbeta med modulen med en hastighet av 9600. Så efter firmware, öppna terminalen och gå in:
"AT" (utan citat) svaret "OK" borde komma (det betyder att allt är korrekt anslutet och modulen fungerar)
”AT + BAUD96000” (utan citat) bör svaret ”OK9600” komma.
Om du har rätt svar, gå till nästa steg.
Steg 7 Firmware
För att skriva firmware och firmware själv använder jag Arduino IDE. Den nuvarande versionen för idag är 1.8. Egentligen firmware:
Steg 8 Ställ in din telefon.
På en Android-telefon måste du installera ett program för att styra roboten via Bluetooth. Det finns många av dem. Du kan ange "Bluetooth Arduino" i Google Play och välja efter din smak. Jag gillade BT Controller. Ladda ner och installera på din Android-telefon eller surfplatta. Därefter måste du via Android-inställningarna upprätta en anslutning till vår modul. Lösenordet för anslutningen är “1234” eller “0000”. Konfigurera sedan programmet för lämpliga kommandon. Listan är nedan.
Steg 9 Datorinställning (vid behov)
Om det behövs, eller bara bekvämlighet för kontroll, kan du använda en dator eller bärbar dator. För att göra detta måste datorn ha Bluetooth. Vi skapar kommunikation med vår modul via kontrollerna på datorn. Därefter behöver vi en terminal för att skicka kommandon. Något bekvämt för dig. Efter att ha registrerat firmware utförs kontrollen med följande knappar (kommandon):
W - framåt
S - tillbaka
A - vänster
D - rätt
F - stopp
G - ratt
K - strålkastare
L - strålkastare avstängd
R - lyft upp
E - nedförsbacke
Q - stopplyft
T - fånga
Y - Släpp
H - Stop Claw
Att ständigt ange kommandon är obekvämt, så jag rekommenderar att du använder programmet för att skicka kommandon. Jag använder Z-Controller.I programmet väljer du porten (com-port genom vilken anslutningen skapas) och konfigurerar tangenterna för kommandona. Ställ in viloläge och intuitivt.
