
Jag köpte en cool leksak till min son på Ali - en grävmaskin på en radiokontroll.
Det visade sig vara en allvarlig brist, vilket uttrycks i frånvaron av bombegränsare. dvs om du lyfter pilen maximalt börjar den spricka, detsamma gäller för tornets rotation runt axeln (670 grader). Som ett resultat är det ofta en spricka även med en liten belastning. Runt axeln roterar den i allmänhet i en riktning med stora svårigheter. Jag demonterade denna enhet och idén kom till mig att uppgradera den.
1. Byt ut motorerna på chassit med andra, mer kraftfulla (även om detta är fråga för nu). Och gör en justering för hastighet. Nu är hastigheten en, konstant - framåt eller bakåt.
2. Ställ in bomrörelsebegränsarna, som når maximal bomlyft och stopp, endast i motsatt riktning.
3. Byt ut motorerna i bommen med stegmotorer eller servos. Här behövs verkligen hjälp av att förstå människor. Vilket är bättre för den här rollen? Och passar det alls? Jag skulle vilja att grävmaskinen klarar av uppgifterna att känna sig lite mer komplicerad än att ladda lossad sand, även om detta är svårt för honom nu - växlarna sprickar ...
4. Batteriet är kraftfullare och större att installera. Där finns i fallet stålstänger för en motvikt. Du kan bara fylla utrymmet. Det finns mycket utrymme för experiment :)
5. Därför vill jag byta ut kortet i själva grävmaskinen med en arduino och lägga till en WiFi-modul för att styra enheten. Fjärrkontrollen måste också göra en annan. Här är frågan. Vilken arduinka att ta? vilken kommer att klara? Nano, uno? Det som behövs är att ansluta 6 motorer till arduino (chassi - 2, till tornet och 3 till bommen). Är det troligt behov av en spänningsstabilisator?
I allmänhet, vad kan du råda för att implementera denna idé? Om du tror att uppgiften inte är genomförbar, förklara av vilken anledning du. Jag vill verkligen göra med min son, även om han är van vid att lära sig nya saker och inte att lära sig ... :)
Fotochki.
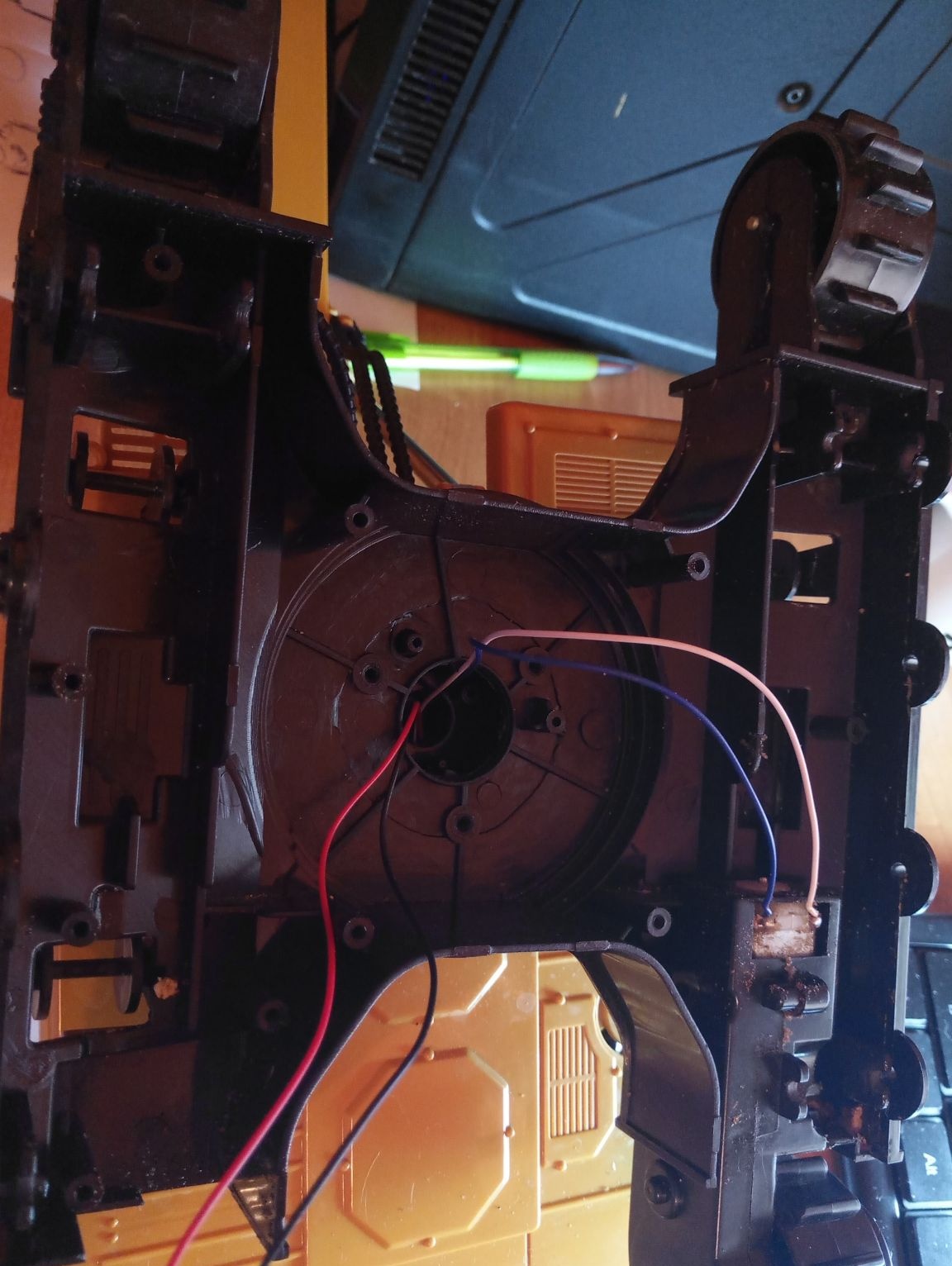
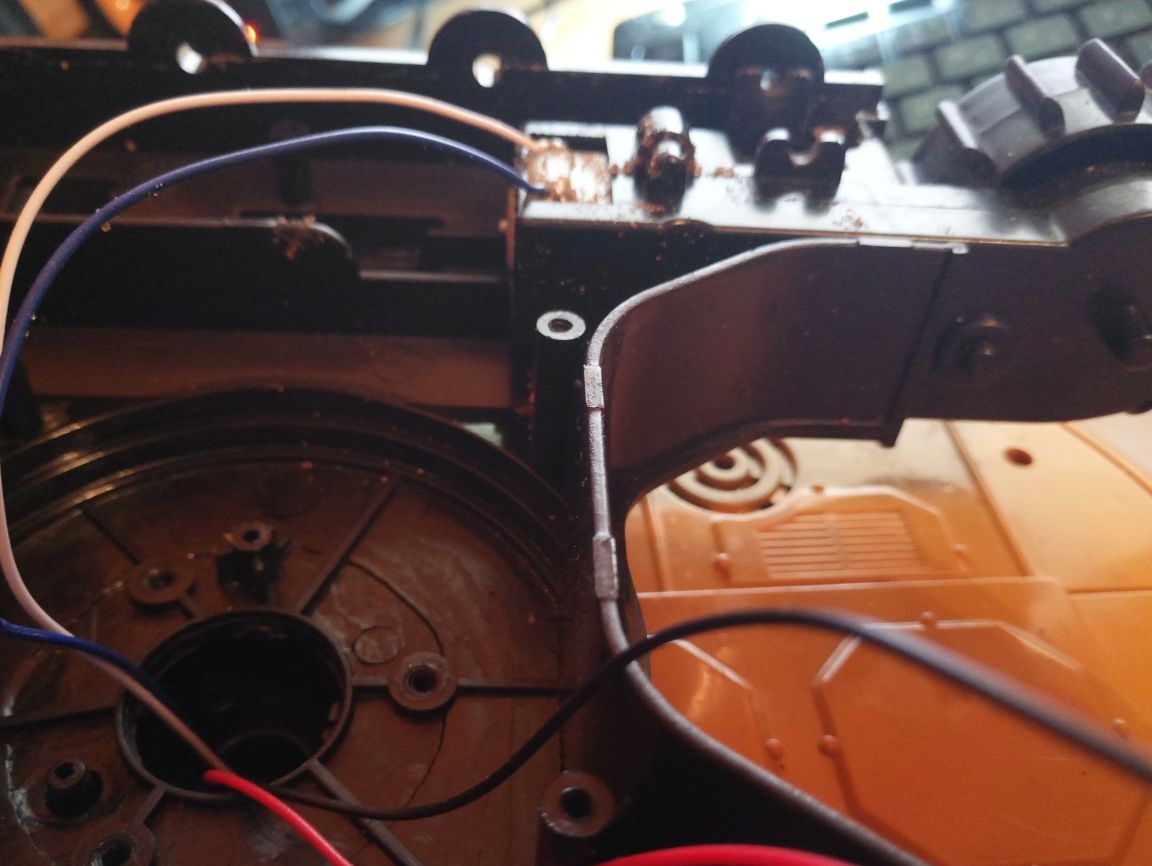
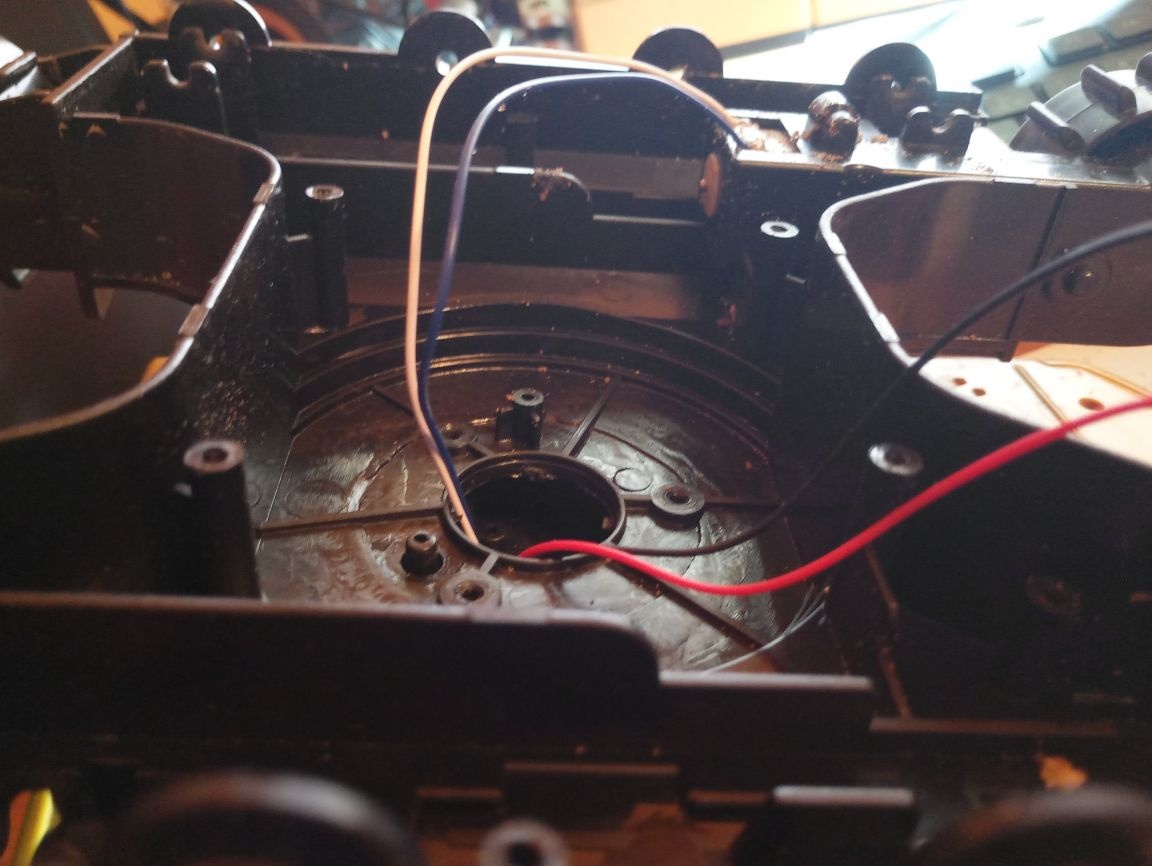
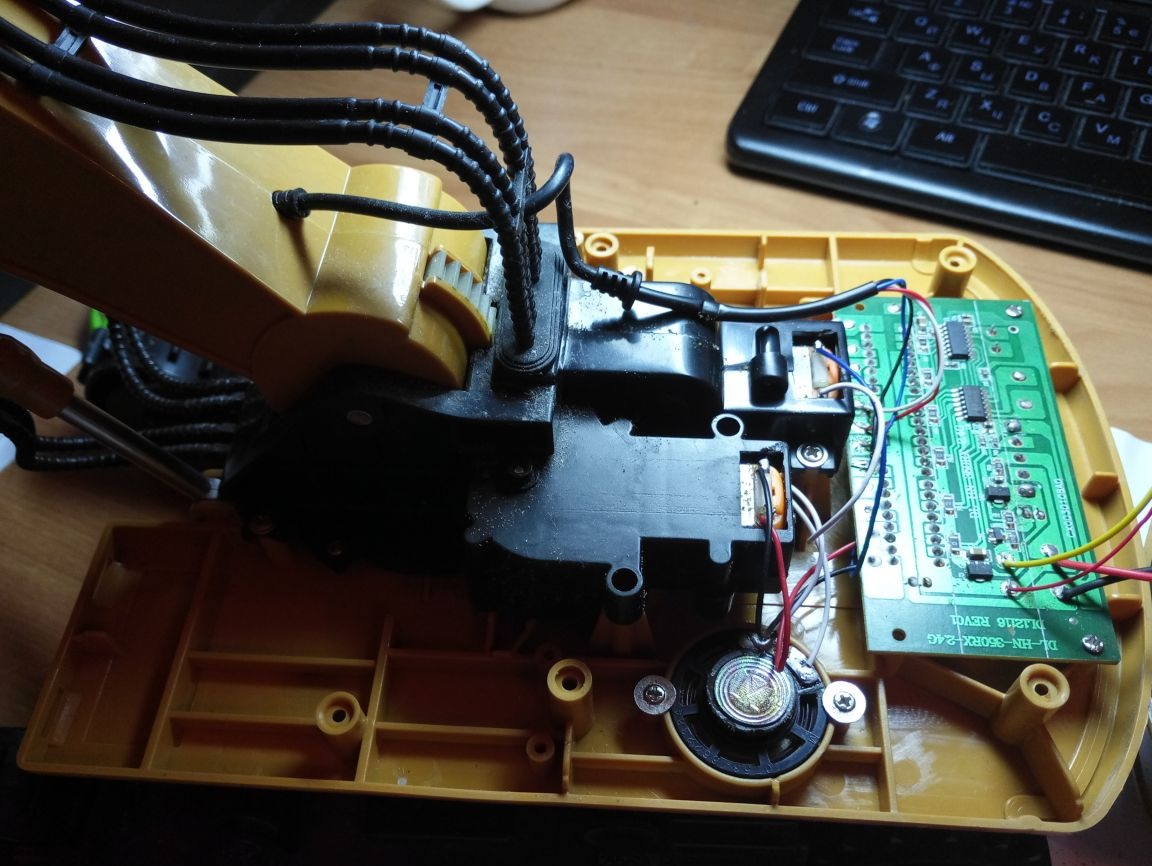
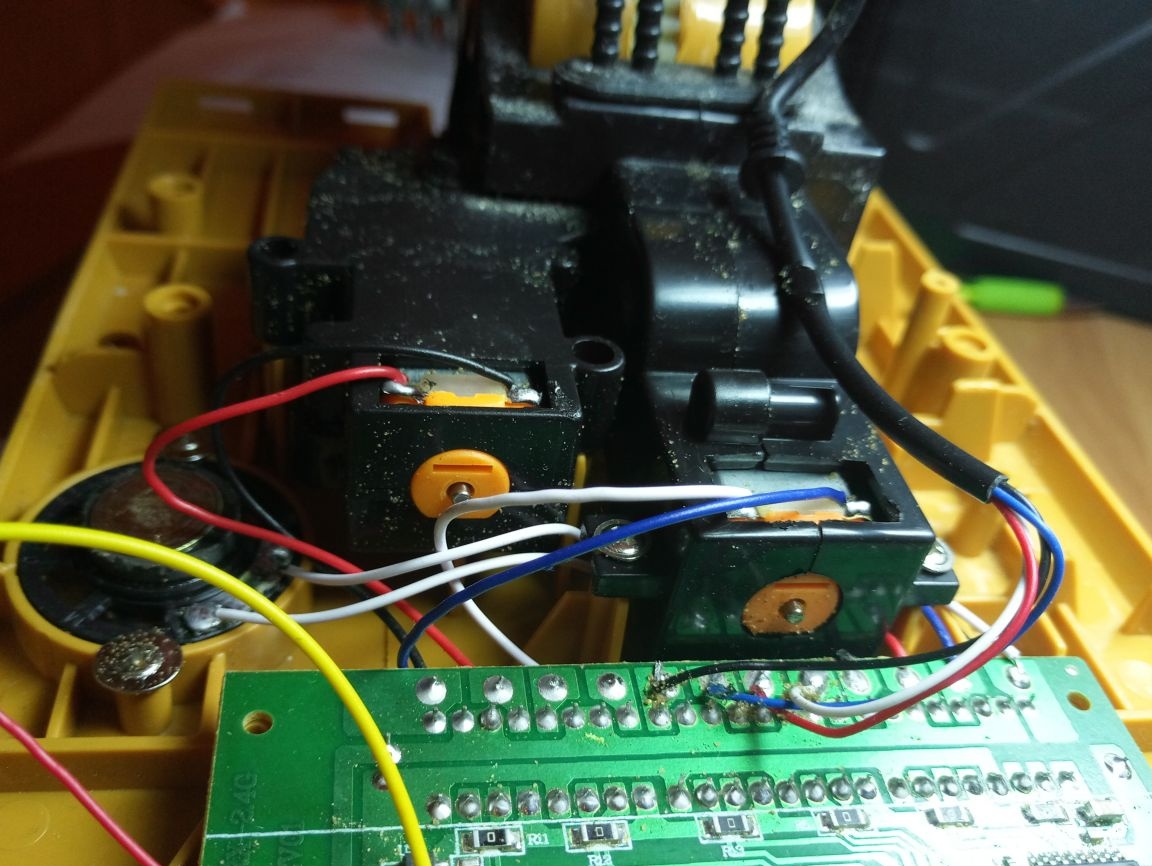
mekanismerna själva demonterades bara i chassit klättrade inte in i pilen