



Den här artikeln beskriver hur man gör gör det själv robotkonstnär. Naturligtvis har du en sådan bild roboten kommer inte att rita, men överraska bekanta eller vänner med hans homebrew kvist det är möjligt. Och om du samlar en sådan robot med dina barn, kommer det utan tvekan att hjälpa till att utveckla kreativa karaktärsdrag.
Verktyg och material:
-Två LED-enheter;
-Bord 3 mm;
-Pila;
-Kley;
-
-
-
-
-
-Dator;
- skruvmejsel;
-Lodjärn:
-Smazka:
-Lineyka;
-Karandash;
-Drel;
-Pistolen;
-Skrivpennan;
- sax;
-Pruzhina;
-Nitka;
- Batteri 12V;
seeing-;
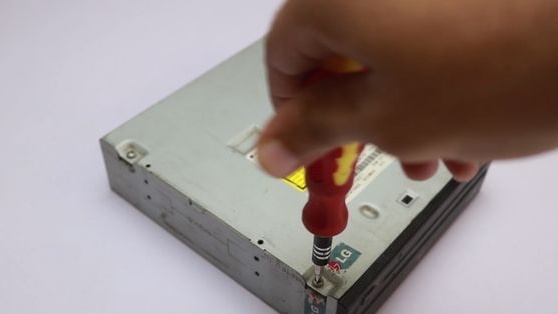
Steg ett: LED-enheter
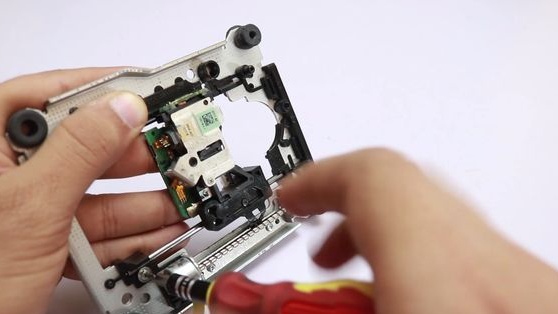
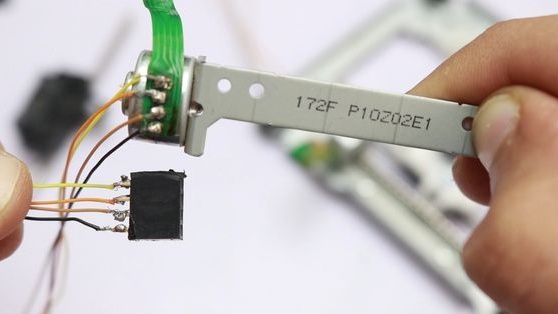
Parses CD-enheter. Tar bort skydd, elektronikbräda.




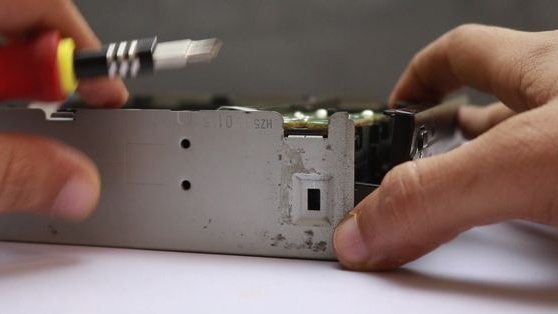

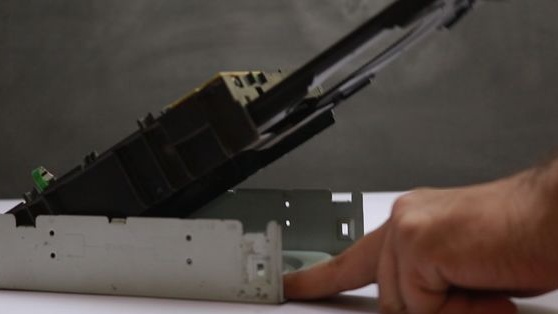
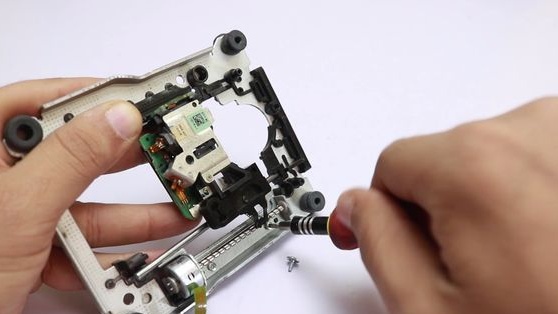
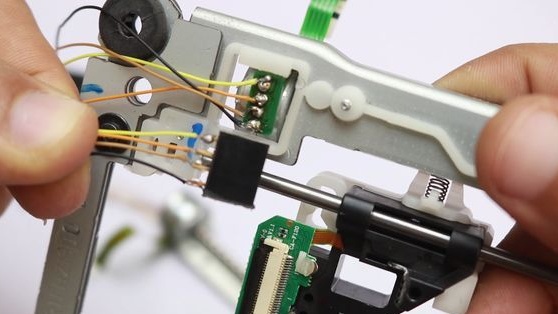
Tar bort en ram med en vagn och en stegmotor från huset.
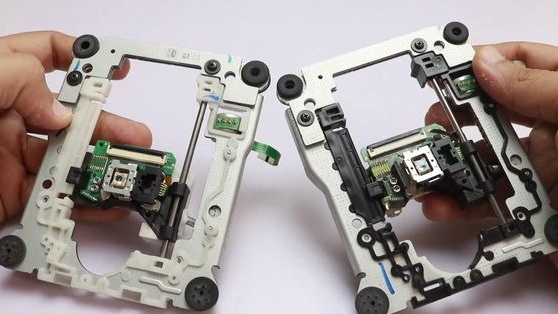
Hon lägger en ram och analyserar den andra.
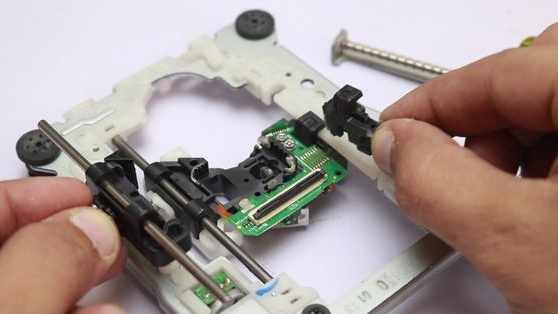
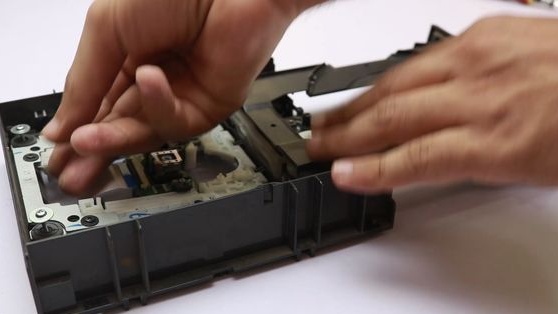
Från den andra CD-enheten behövs bara en vagn och en stegmotor.


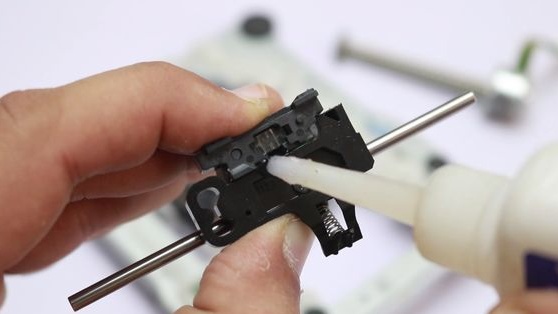
Smörjer vagnen.
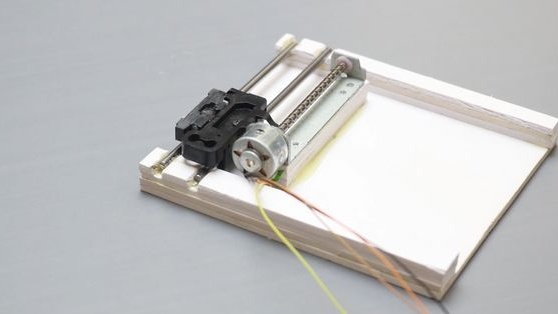
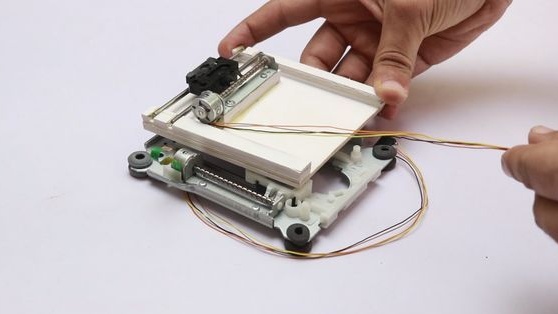
Soldater för att leda stegmotorer. Anslutningen är lödad till ledarnas andra ändar.
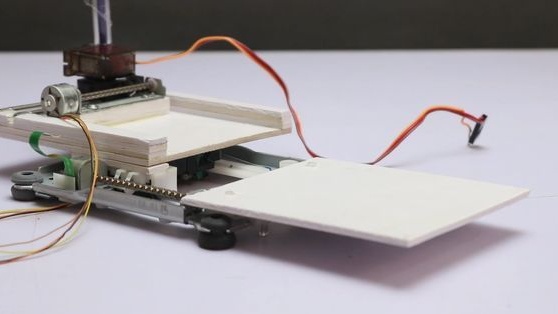
Steg två: X-axel och Y-axel
Såg av en planka (längre på bordet) 10 * 9 cm. Vid bordets kanter limmar stängerna 2 * 10 cm.
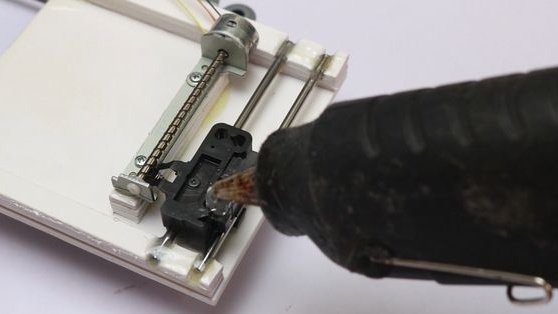
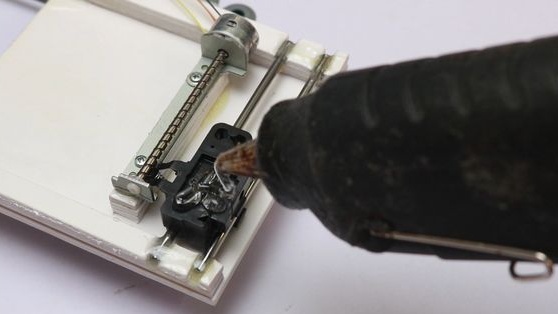
Skär spår för vagnsstyrningar. Limma guiderna.

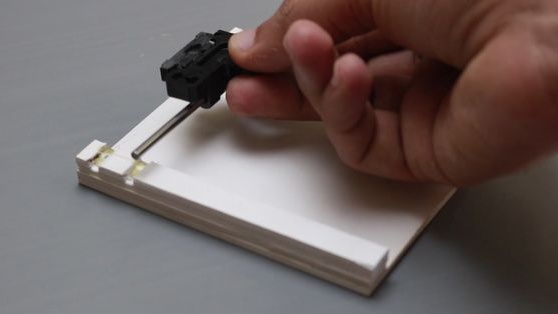
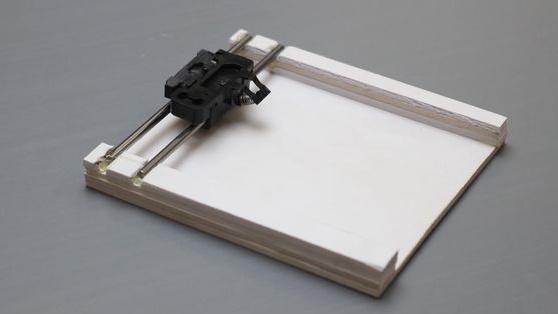
Ett block på 3 * 5 cm limmar bredvid vagnen. Skruvar på stegmotorn. Axis X är redo.
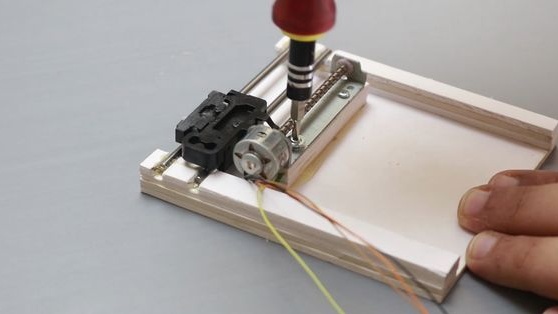
Limmar X-axelmekanismen med Y-axelmekanismen.

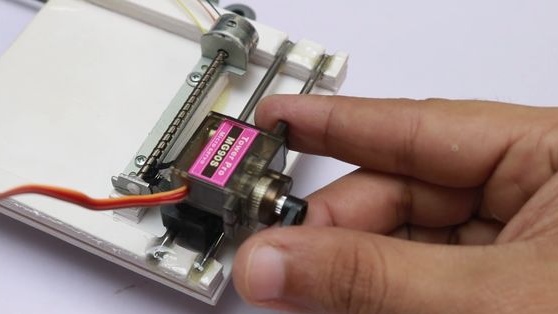
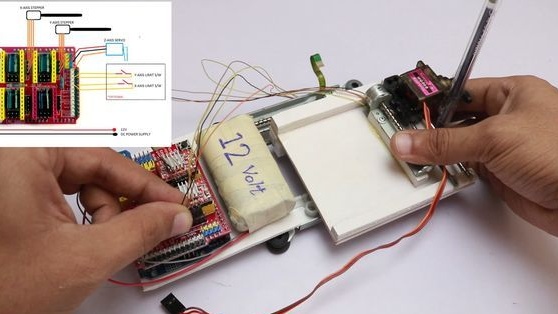
Fäst servodrivningen till vagnen med axeln vänd ut (se bild)
Steg tre: Penna
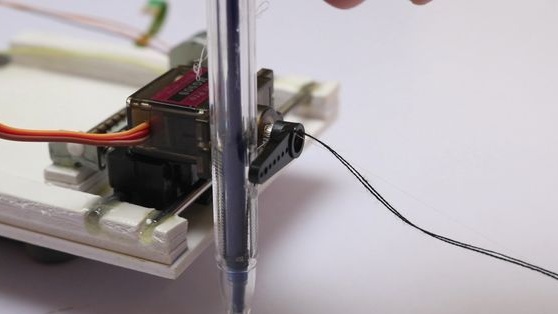
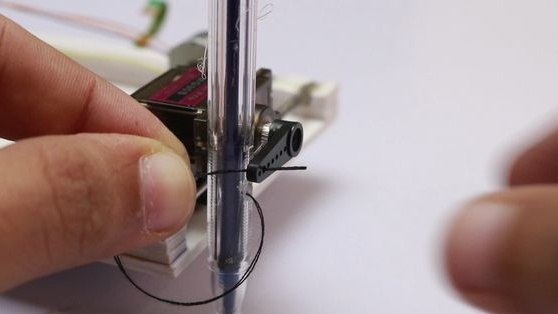
Tolkar en penna. Skär 1 cm. Av axelns övre ände. Vrid vårhälften på staven. Efter att ha dragit sig tillbaka cirka 1 cm från botten av stången, linda in en tråd på den. Ties. I handtaget gör ett hål. Drar tråden i hålet. Monterar stången på plats. Ställer in locket.






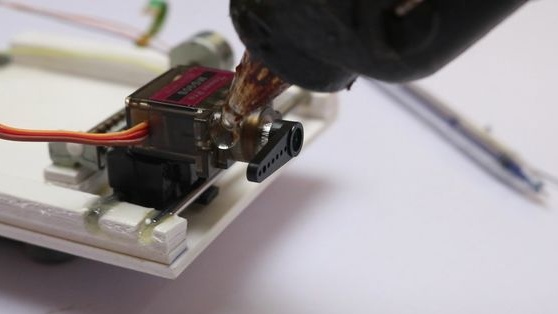
Limmar handtaget på servomotorens kropp (stavens kulan vilar mot ytan). Fäst den andra änden av tråden på servo spaken.
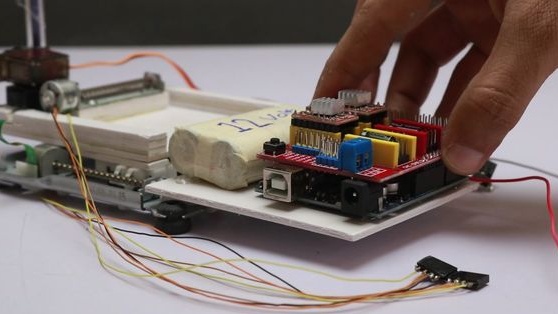
Steg fyra: Modulmontering
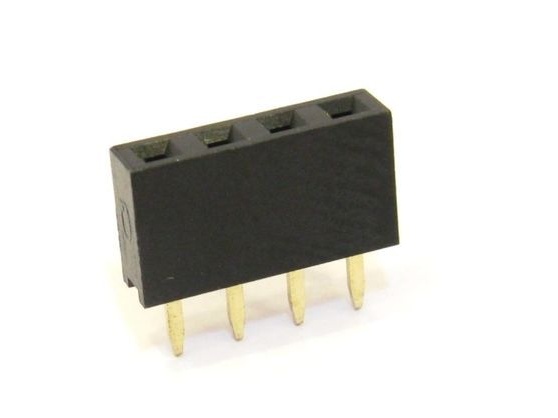
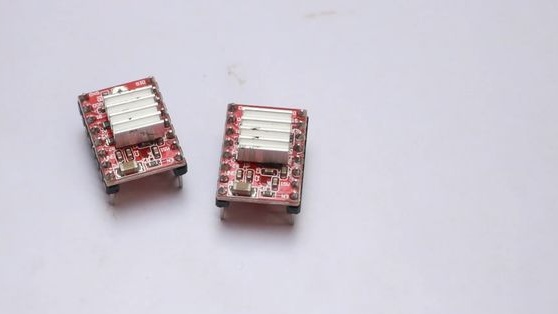
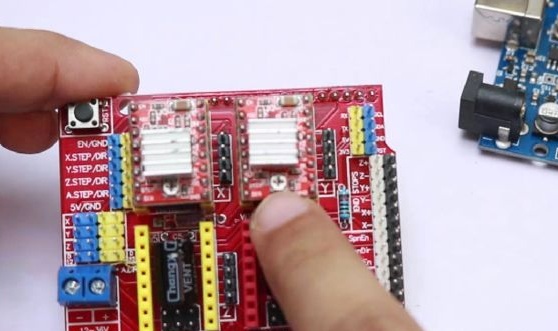
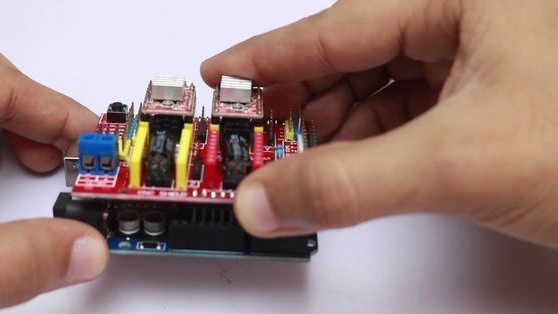
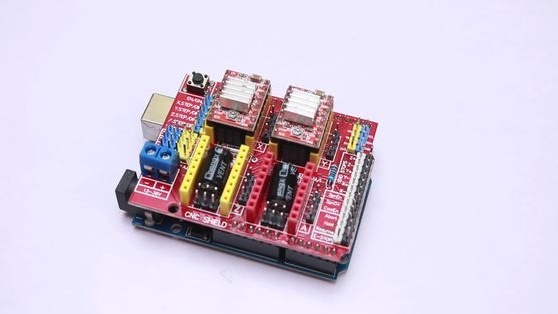
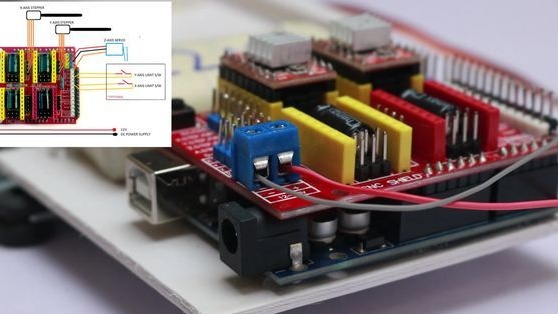
Installerar två stegmotormoduler med radiatorer på expansionskortet.
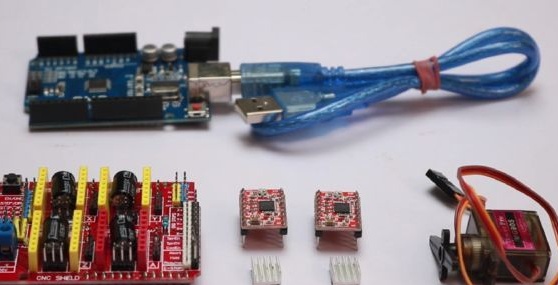
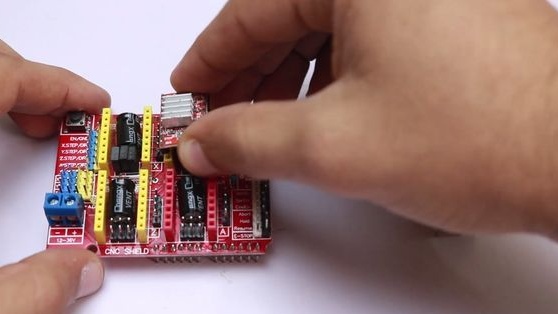
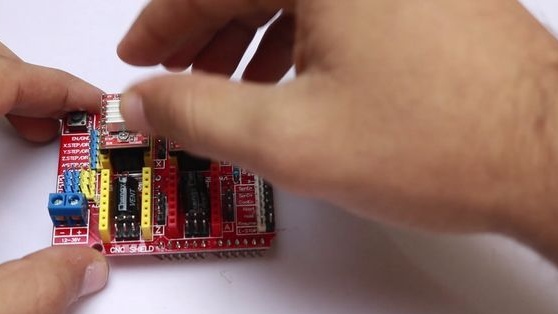
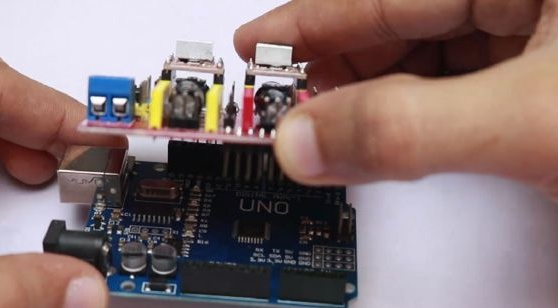
Installerar ett expansionskort på Arduino.
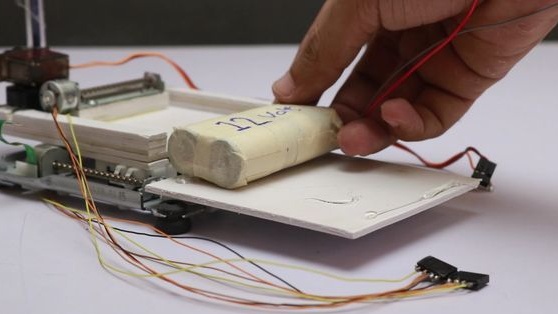
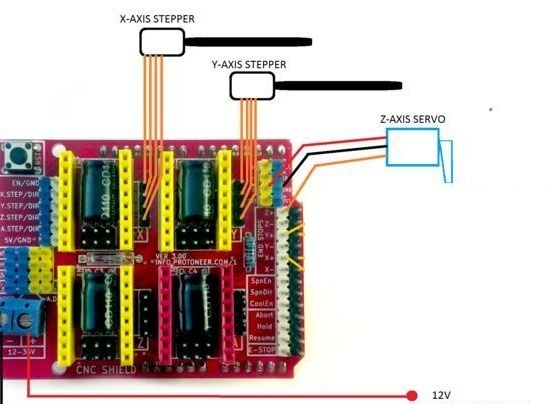
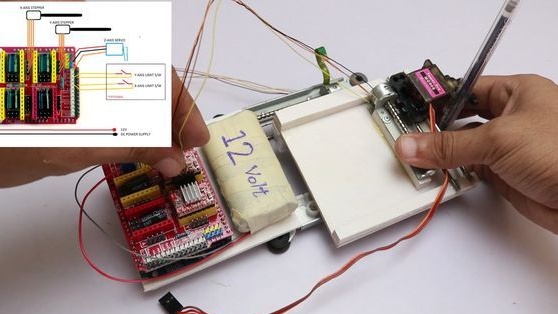
Steg fem: Anslut
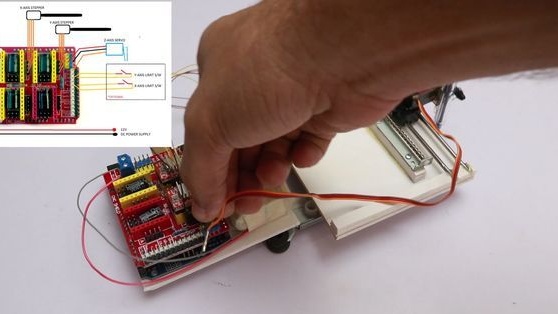
Installerar ett batteri. Fäst och ansluter alla element enligt de givna scheman.
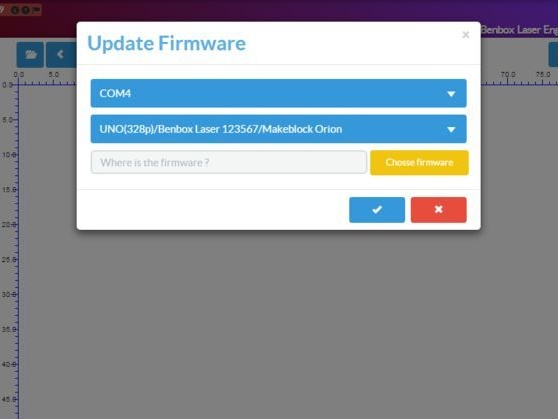
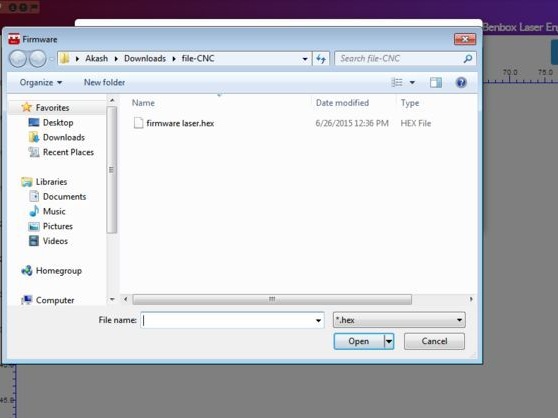
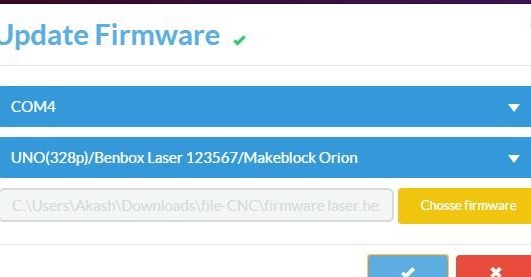
Steg sex: programvara
Laddar programvara. Öppnar programvara. Ansluter ett Arduino USB-kontakt. När du uppdaterar firmware väljer du COM (3.4 eller 5).
Ställer in parametrarna.
Första sidan:
Seriell port: COM (3.4 eller 5)
Pen Up: 35
Pen Down: 22
Hastighet: 800 (du kan öka)
Tid: 200
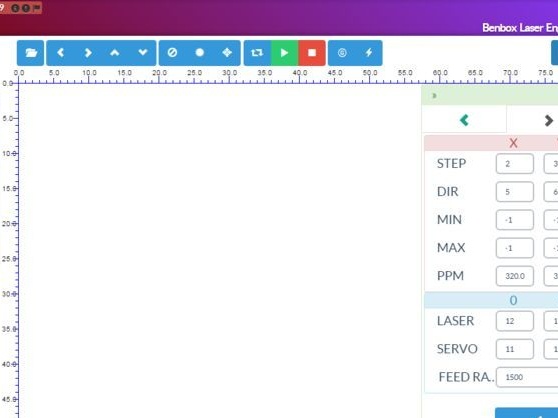
Andra sidan:
Steg: x = 2 y = 3
Dir: x = 5 y = 6
Min: x = -1 y = -1
Max: x = -1 y = -1
Ppm: x = 320 y = 320
laser: 0 = 12 1 = 12
Servo: 0 = 11 0 = 12
Mata Ra. : 1500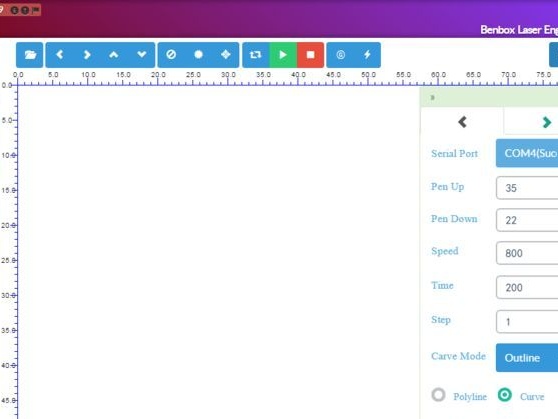
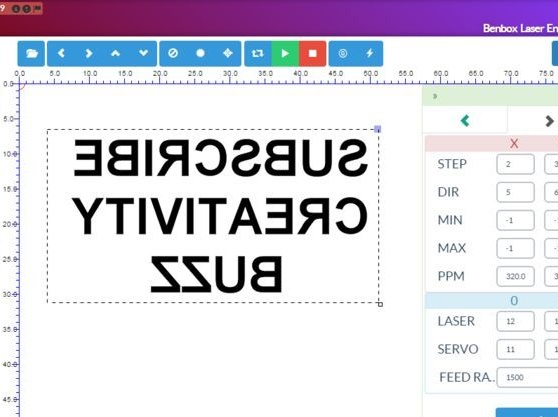
Robotkonstnären är redo. Det återstår att ange text i fältet och köra programmet.
Hela processen med att skapa en robotartist kan ses i videon.