


I den här artikeln kommer guiden att visa oss hur han skapade den fungerande Lego 60193 Arctic Air Transport helikopter modellen quadrocopter. Huvuduppgiften för tillverkningen av quadrocopter, utöver flygegenskaper, var att spara så många originaldelar som möjligt.
Låt oss se en kort video som visar hur quadrocopter fungerar.
Så för tillverkning av en sådan quadrocopter använde befälhavaren följande
Verktyg och material:
-LEGO City Arctic Helicopter - 60193:
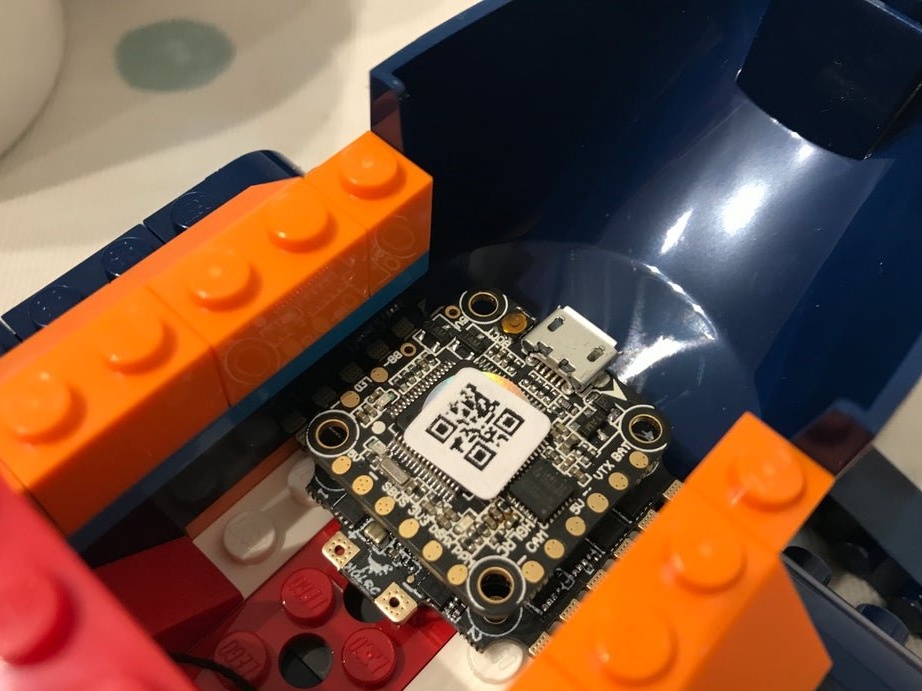
- Controller och ESC 20x20 mm, till exempel HGLRC XJB F428 Micro F4 AIO OSD;
- Borstlösa motorer - 4 st;
-Propellery;
-Batteri 950 mAh;
-Razemy;
seeing-;
-Radio-modul (sändare och mottagare);
-Krepezh;
-Nozh;
-Lödjärn;
-Pistolen;
- skruvmejsel;
-Drel;
Steg ett: Lego Build
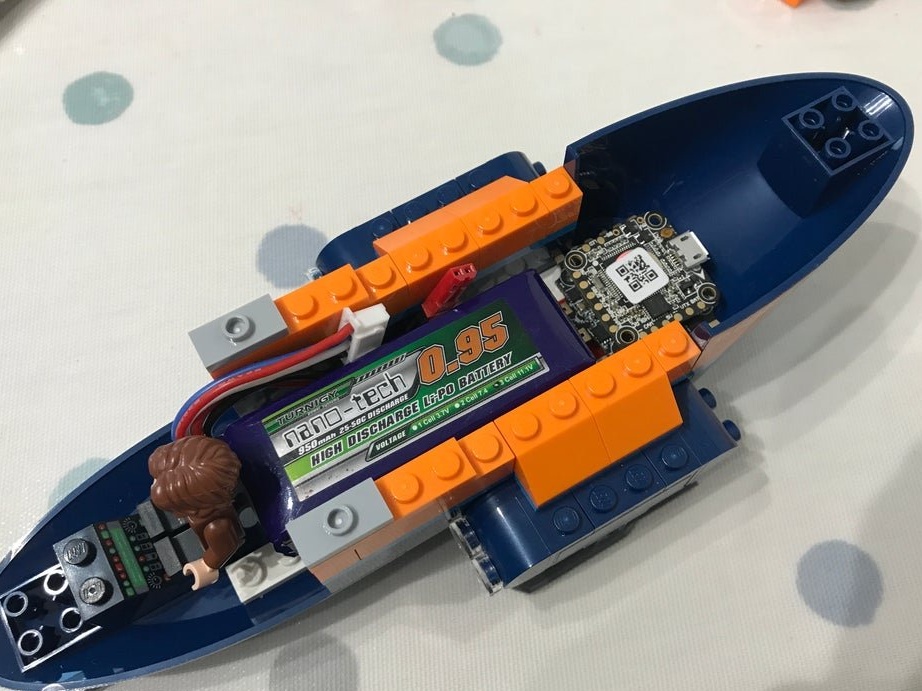
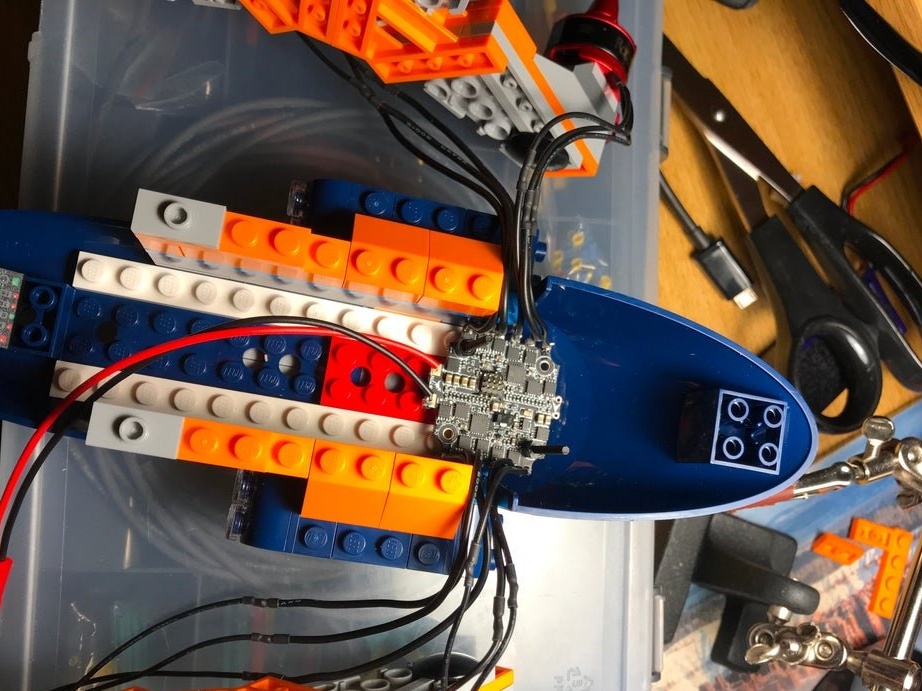
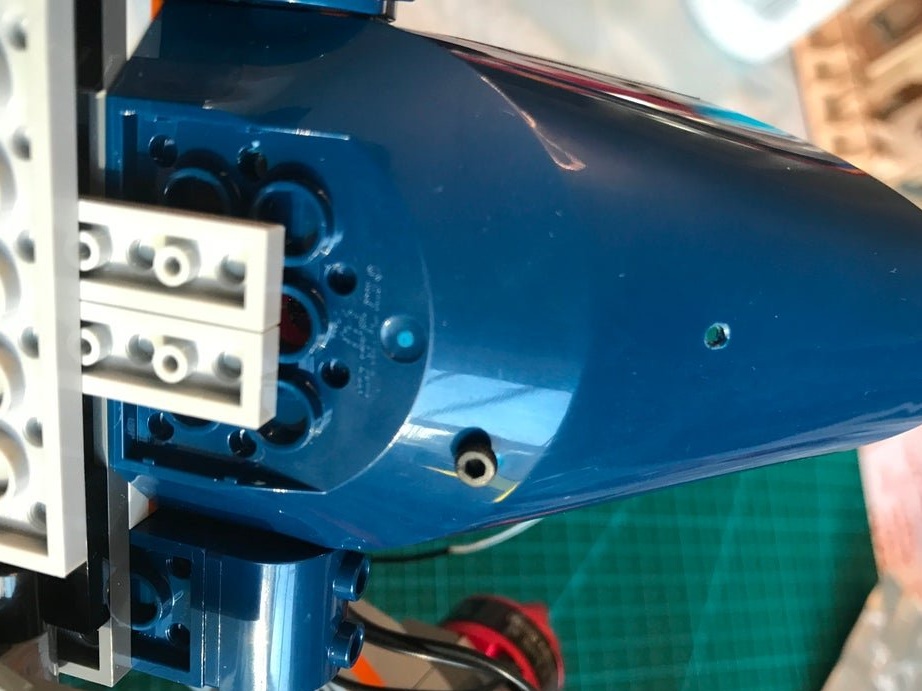
Först samlar mästaren LEGO-Arctic. Sedan demonteras modellen delvis. Inuti måste du placera batteriet och regulatorn med hänsyn till modellens balansering.


Steg två: Motormontering
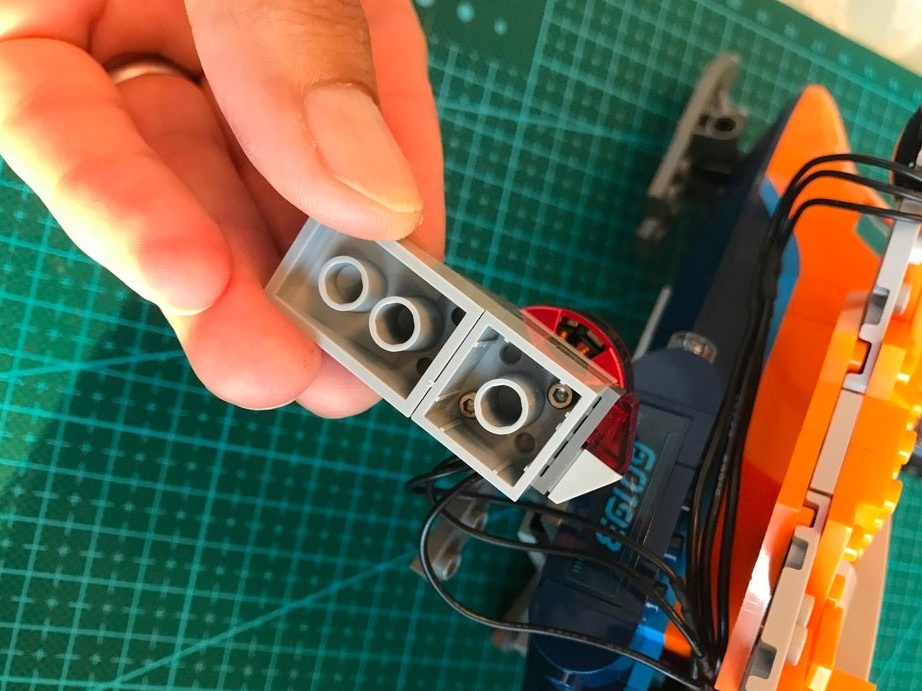
Monteringshålen för den borstlösa motoren 1806 är nästan desamma som tapparna på standard LEGO 2x2-plattan. Varje “motor” -fäste på en quadrocopter har en 2x2 mörkgrå kakel (LEGO 3022) och en 2x2 ljusgrå kakel med en vertikal stift (LEGO 2460), som vanligtvis hålls på naven på en LEGO-propell på toppen.
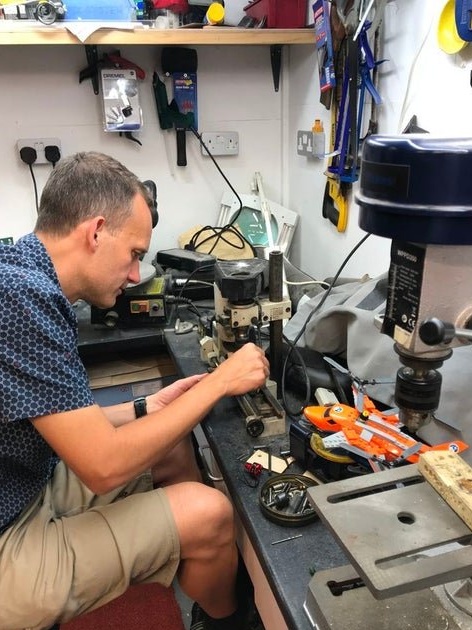
Befälhavaren borrar monteringshålen. På motorer, i mitten finns det lågvatten. Ett hål under det borras i mitten av plattan. Säkrar motorer.








Steg tre: axlar
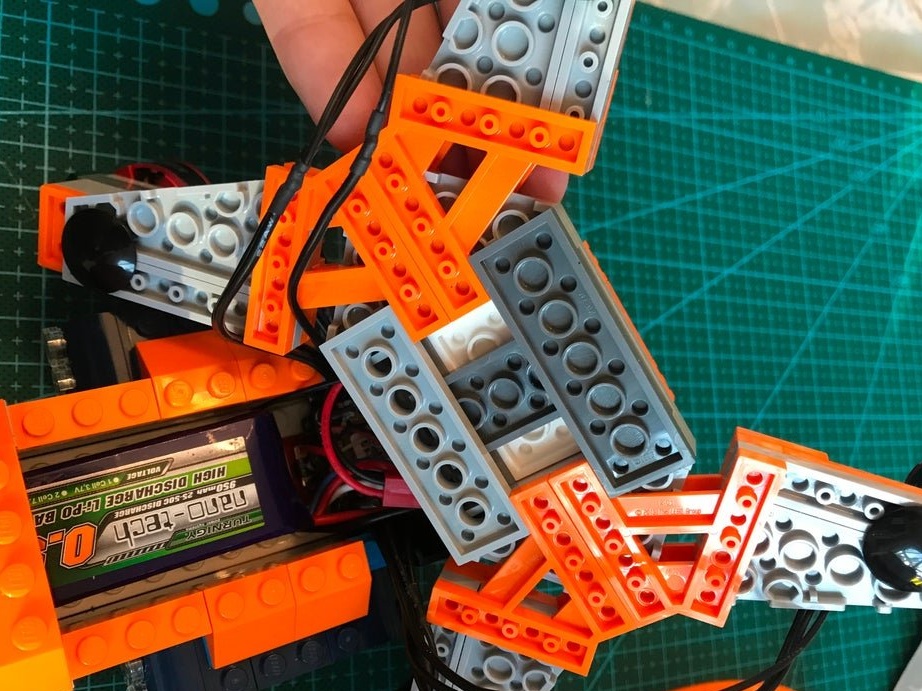
Om du ordnar om "axlarna" på quadrocopter kan du ändra layouten något för att ge ett bredare eller smalare arrangemang av motorerna och platsen för skruvarna relativt varandra.
Standard LEGO-aggregatet (första fotot) har "axlar" och motorer placerade breda (horisontellt) med en ganska stor skruvöverlappning. Befälhavaren gör om "axlarna" och kastar motorn och därmed skruvarna.



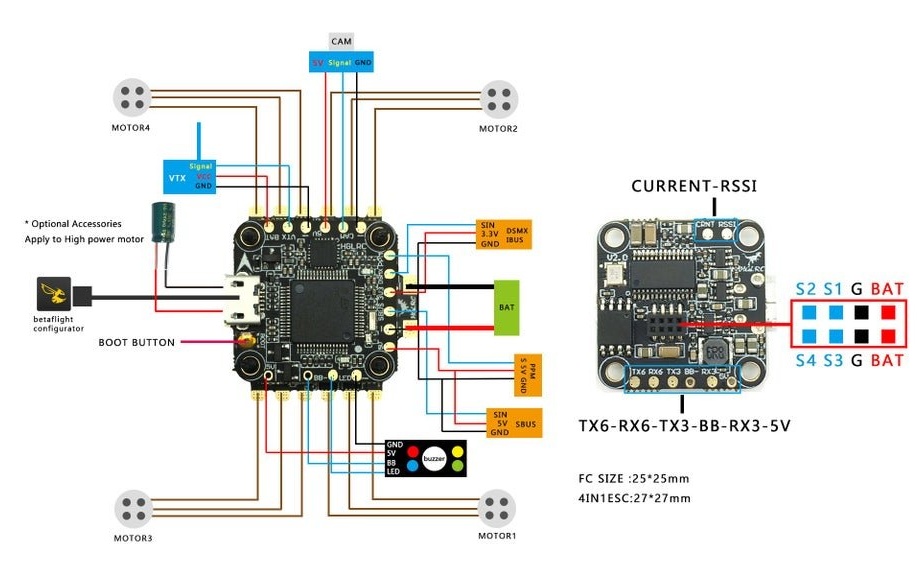
Steg fyra: elektronik
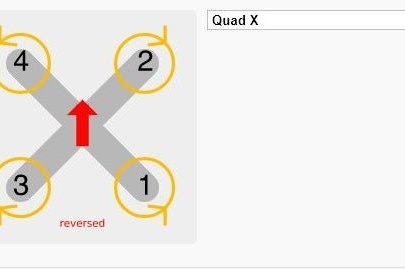
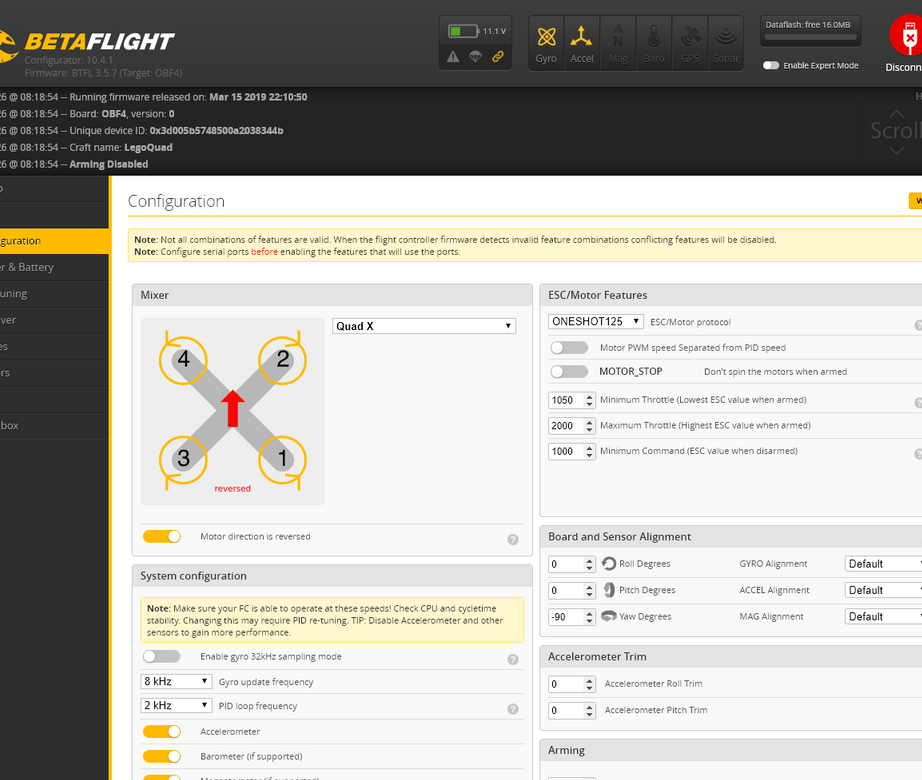
Enligt schemat installerar det elektronik. Det första fotot visar ett diagram över motorernas rotationsriktning. Rotationsriktningen kan också ändras i programmeringsstadiet.

När installationen är klar och innan batteriet ansluts kontrollerar guiden anslutningarna för att förhindra brott eller kortslutning.
När du slår på strömmen bör du se lamporna på flygkontrollen och några ljudsignaler från ESC.
Steg fem: Setup
Nu när allt är anslutet är det dags att konfigurera styrenheten.Detta innebär nedladdning av programvara (firmware) som utför uppgiften att avkoda styrsignalerna från RC-sändaren, bearbeta sensorns ingångssignal (accelerator, gyroskop) och tillhandahålla styrsignaler för ESC för att rotera motorerna med en given hastighet.
Avlägsna propellerna för säkerhet! Ett batteri krävs inte för de första installationsstegen, bara USB-ström.
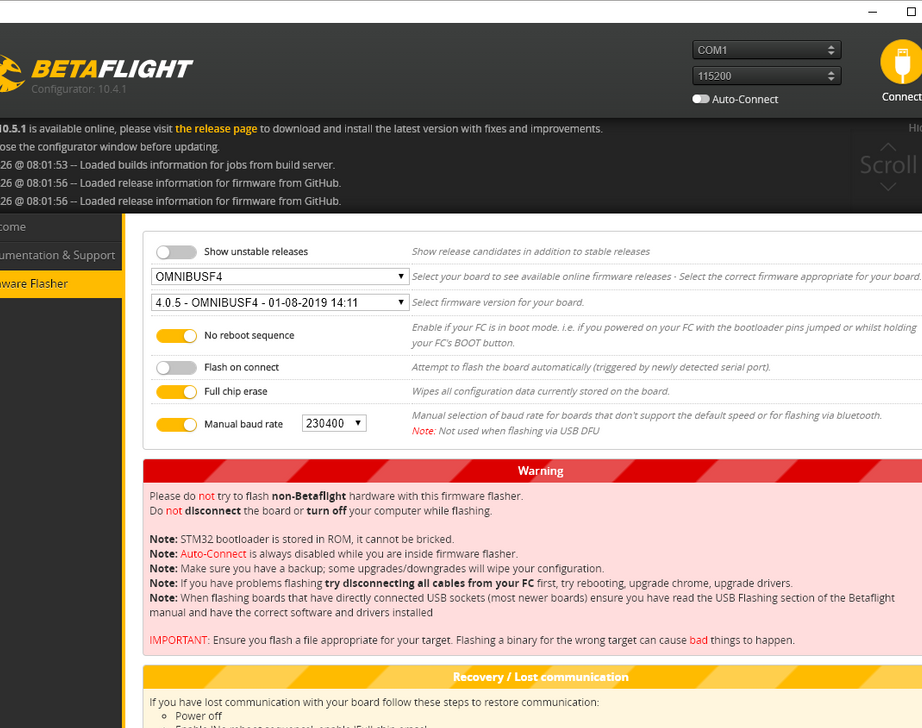
Ladda ner Beta Configurator
Anslut mikro-USB-kabeln till flygkontrollen. Observera att detta kan vara enklare att göra om regulatorn inte är fastkopplad i chassit.
Ladda ner och ladda upp lämplig firmware för flygkontrollen.
betaflight-settings-legoquad.txt
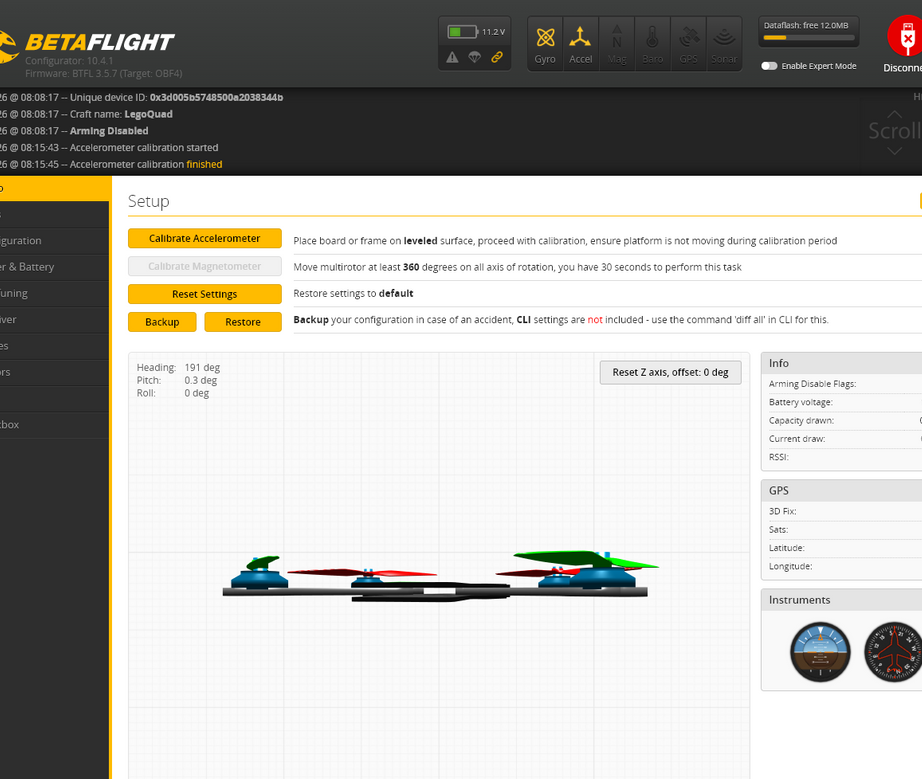
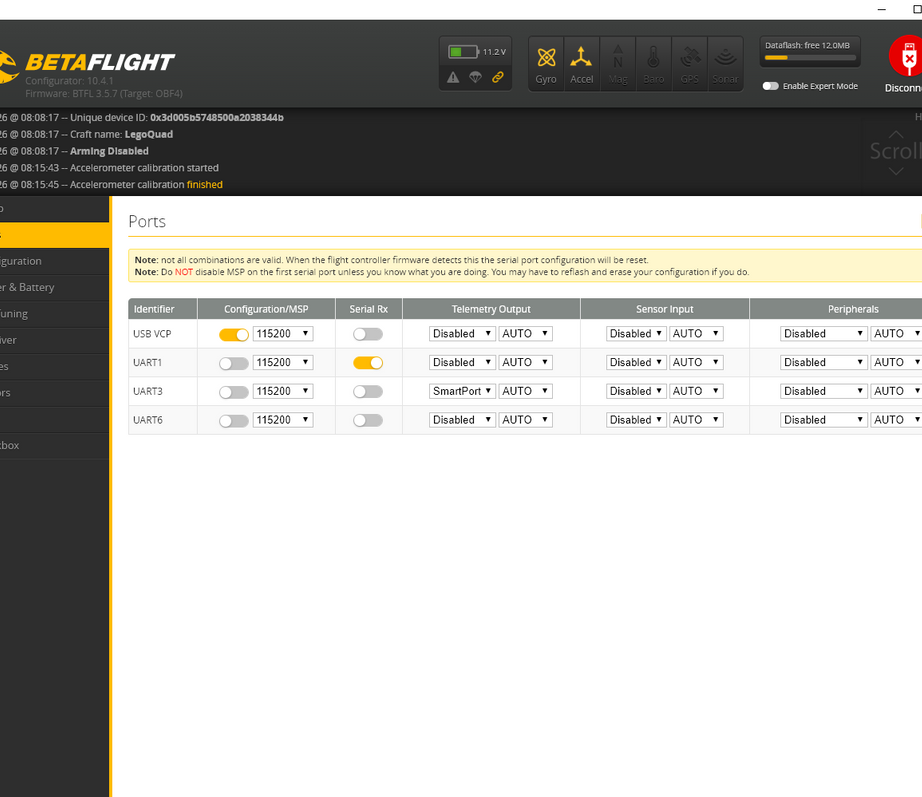
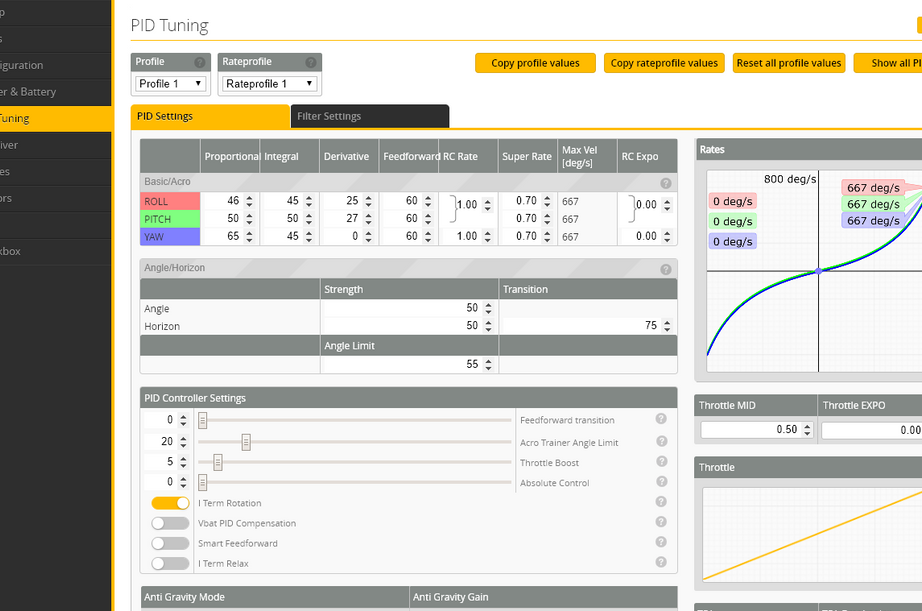
Klicka på knappen "Anslut" och konfigurera följande inställningar:
1. Inställning - modellkalibrering av motorer
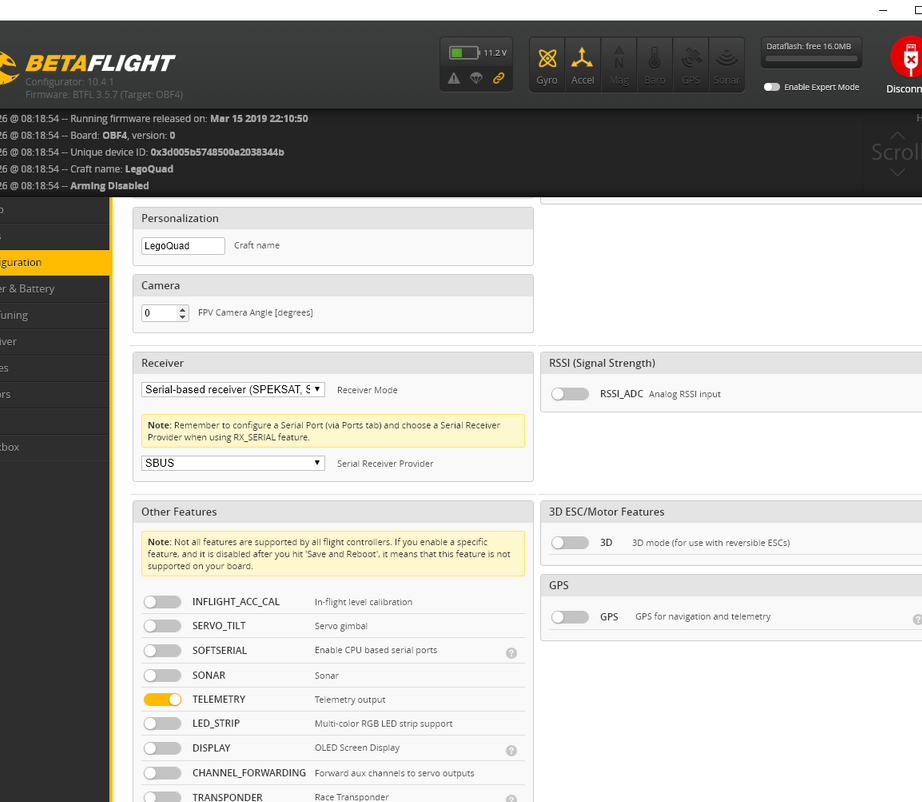
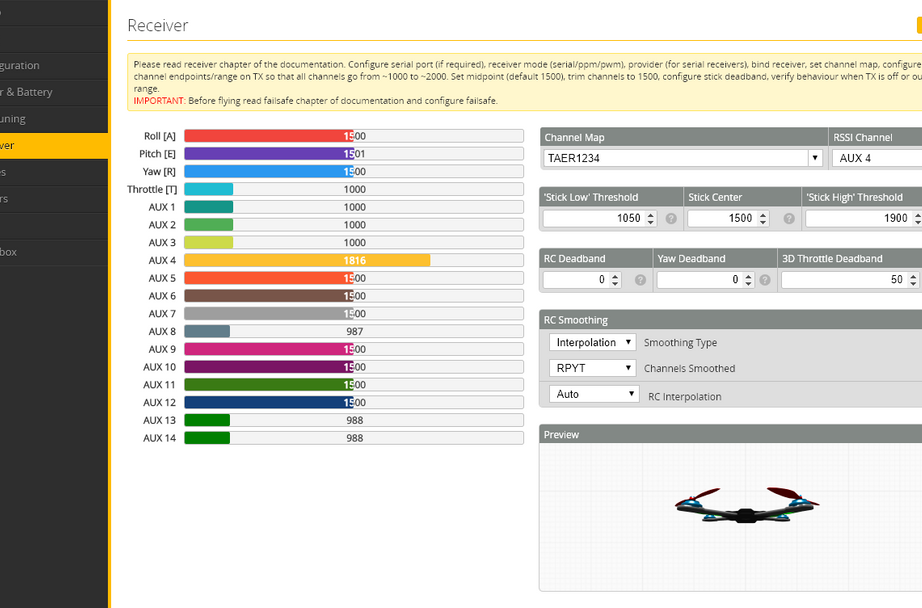
2. Ange portarna - UART1 - Seriell RX för anslutning av SBUS RC-mottagare
3. Spara och starta om
4. Upprätta en anslutning mellan mottagaren och sändaren
5. Överbelastning
6. Värdet för PID-master är inställt på 250
7 Anslut batteriet
8. Justera spänningen.
9. Se till att din kanalvisning och styrriktning är korrekta, när allt är inställt, ska quadcoptermodellbilden i det nedre högra hörnet röra sig i alla rätt riktningar när du flyttar joysticken på RC-kontrollen.
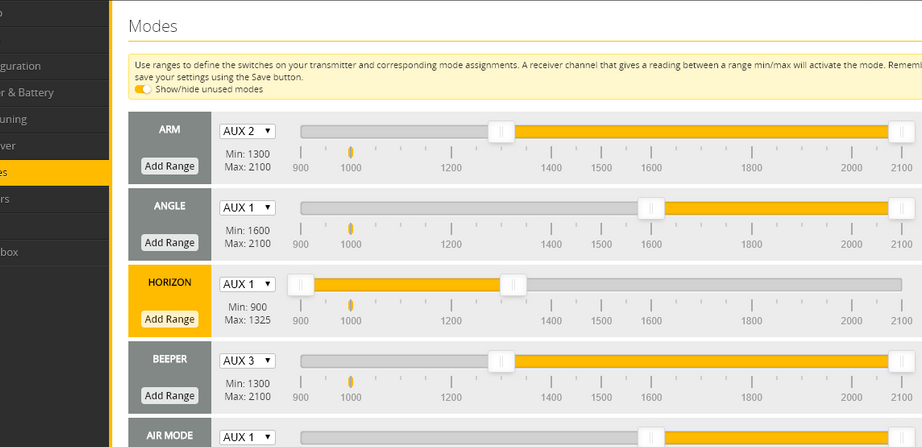
Konfigurerar lägena.
ARM på / av
HORIZON självutjämning / ACRO för traditionell FPV-flygning
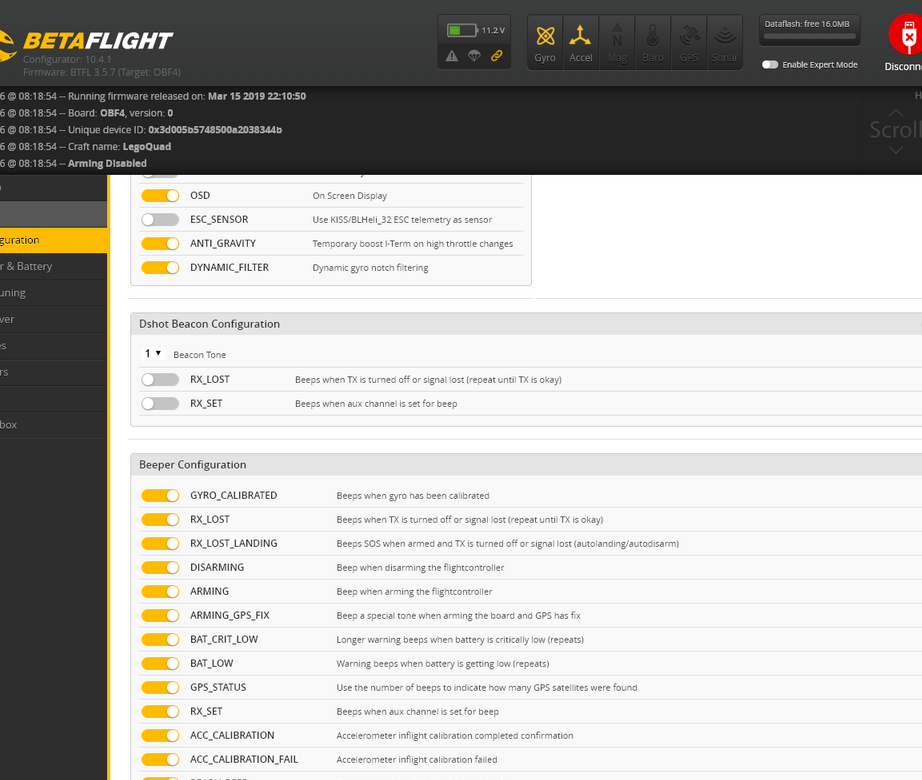
BEEPER - Användbart om du tappar modellen i högt gräs eller buskar.
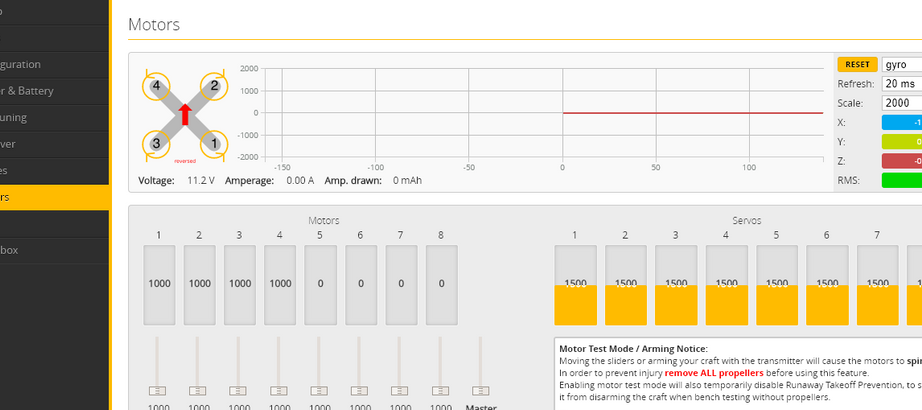
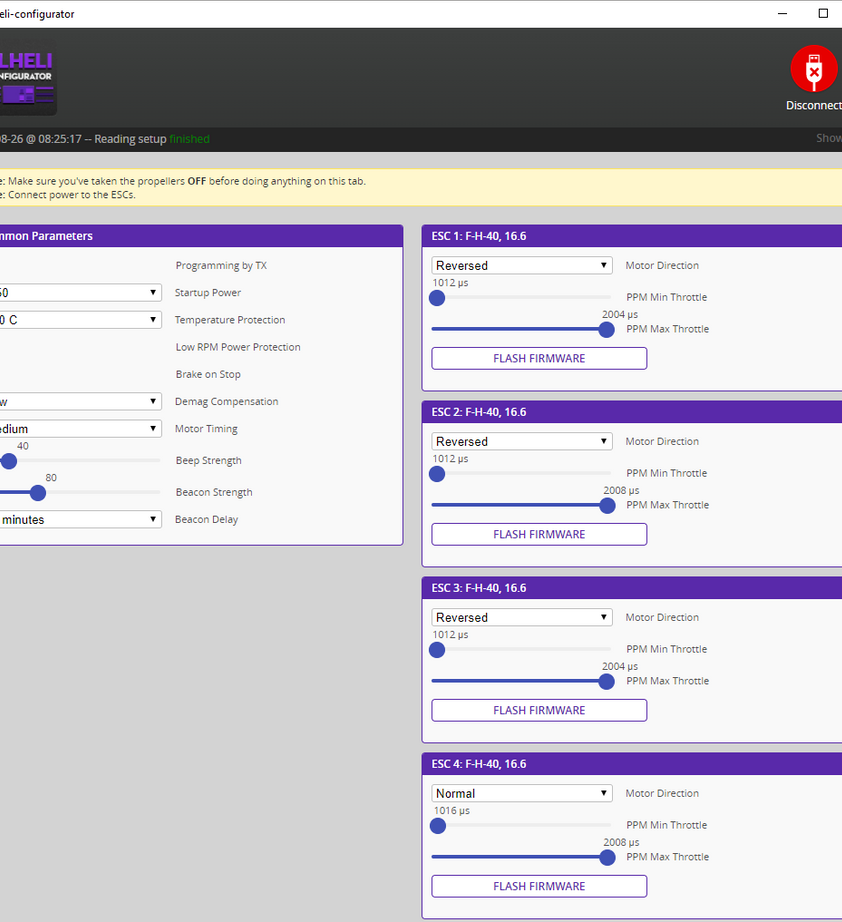
Fliken "Motorer" - använd det här alternativet för att kontrollera varje motor individuellt, och, viktigt, markera rotationsriktningen för var och en av dem
Korrigera fel rotationsriktning med BLHELI-konfiguratorn
Efter alla dessa steg kan du koppla ur USB och batteri och sedan slå på strömmen och kontrollera att allt fungerar:
Slå på sändaren och strömmen
Anslut batteriet och montera quadrocopter på en plan yta
Slå på ARM-omkopplaren och motorerna bör börja snurra med låg hastighet.
Kontrollera gasreglaget medan du ökar hastigheten
I horisontellt läge, prova att luta quadrocopter och se till att motorerna reagerar på rätt sätt, till exempel luta den framåt och de främre motorerna kommer att accelerera.

Steg sex: Slutförsamling
Praktiskt taget hela väskans struktur hålls fast med fästlås. Befälhavaren använder endast smältlim för att montera motorerna.


Allt är klart och du kan testa.



