


Låt oss först förstå skillnaden mellan octocopter och quadcopter. Förutom namnet är detta också antalet motorer på rälsen. dvs quadrocopter - fyra motorer, octocopter - åtta. Detta gäller också för hexacopter - sex, tricopter - tre, etc. Om guiderna till exempel är fyra (X) och åtta motorer, är detta fortfarande en octocopter men betecknas X8. dvs på fyra räls, åtta motorer.
I princip är nummer med ett prefix för koptrar flygplan som styrs av operatörens radiosignal från marken. En student från Indien bestämde sig för att gå längre och göra en oktokopter som kan höja en person i luften. Detta är inte ett billigt projekt. Finansieringen övertogs av utbildningsinstitutionen.
Verktyg och material:
- Motorer Turnigy CA170 Motorer - 8 st;
- Controller Turnigy Fatboy 300A - 4 st;
- Turnigy 200A HV-styrenhet - 4 st;
- Sändare Hitech XG11 Tx / Rx;
-Flight DJI A3 Pro-styrenhet;
-Flight-controller DJI Naza M V2;
- Batteri Zippy 22.2V 5Ah 40C LiPo - 16 st;
- Laddare 6s LiPo-laddare;
-XT150-kontakter - 50 st;
-Wire 8AWG Sillicone Wire - 10 meter;
-Servoprivody;
-Ball för att spela squash (Squash Balls) - 4 st;
- MDF-ark 25 cm x 50 cm x 2 mm;
-Drel;
- Vinkelslipare;
- Skruvmejslar;
- Skiftnycklar;
- Tång;
-Laser skär eller bandsåg;
-Sortiment av muttrar 4mm, 6mm och 8mm, bultar och brickor;
-Gorelka;
-LED LED;
-Lödningstillbehör;
- 2 och 3 mm ståltråd;
-Telrep skruv 100mm-200mm - 40 st;
- 40 krokar och ögonbultar;
-Tachometer Turnigy RPM;
-Kraftanalysator (Turnigy Wattmeter / Ampmeter);
-Batterikontroller;
- Aluminiumprofilrör;
-Aluminiumplatta;
- Dubbelsidig tejp;
-Svetsmaskin;
-Ruletka;
-Dator med Fusion 360;
- Batteri 11,1 V 2200 mAh LiPo 30C;
-Tätt tyg 1,2 m x 1,2 m;
- Stark tråd och nål;
-Bältesäkerhet;
Steg ett: Design
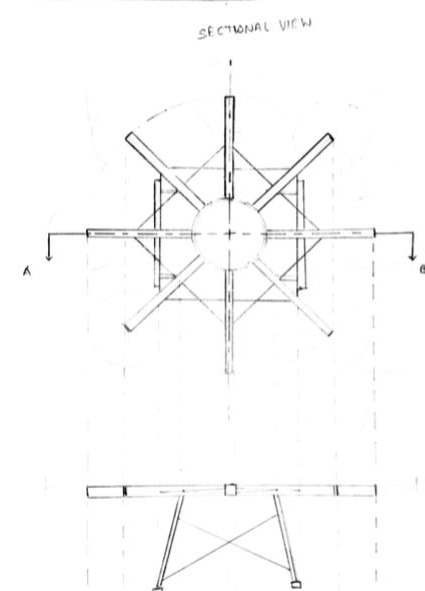
När man utvecklade en bemannad octocopter övervägde befälhavaren olika konfigurationsalternativ, och X8 och H, och T, men kom till slutsatsen att den mest optimala, av olika skäl, skulle vara utformningen av octocopter, enligt det traditionella schemat.
Då var det nödvändigt att ta reda på vad storleken på octocopter bör vara. Beräkningarna gjordes med hjälp av CAD-modeller på Fusion 360 som exempel. De befintliga skruvarna beaktades i beräkningarna. Det optimala visade sig vara en diameter på tre meter, en höjd av en meter. Inre korg, för en person 55x55 cm.

Steg två: kundvagn
Ramen svetsades från en fyrkantig aluminiumprofil med en hylla på 50 mm och en väggtjocklek på 2 mm.
Profilen klipptes och svetsades. Sömmarna rengörs.



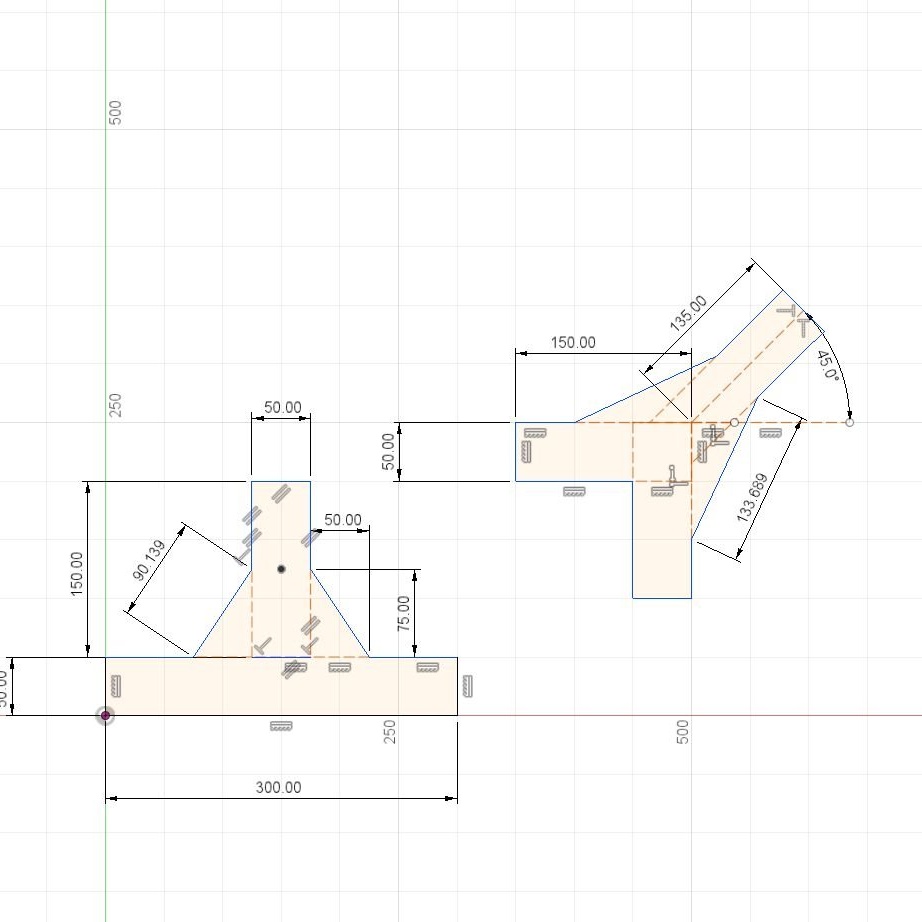
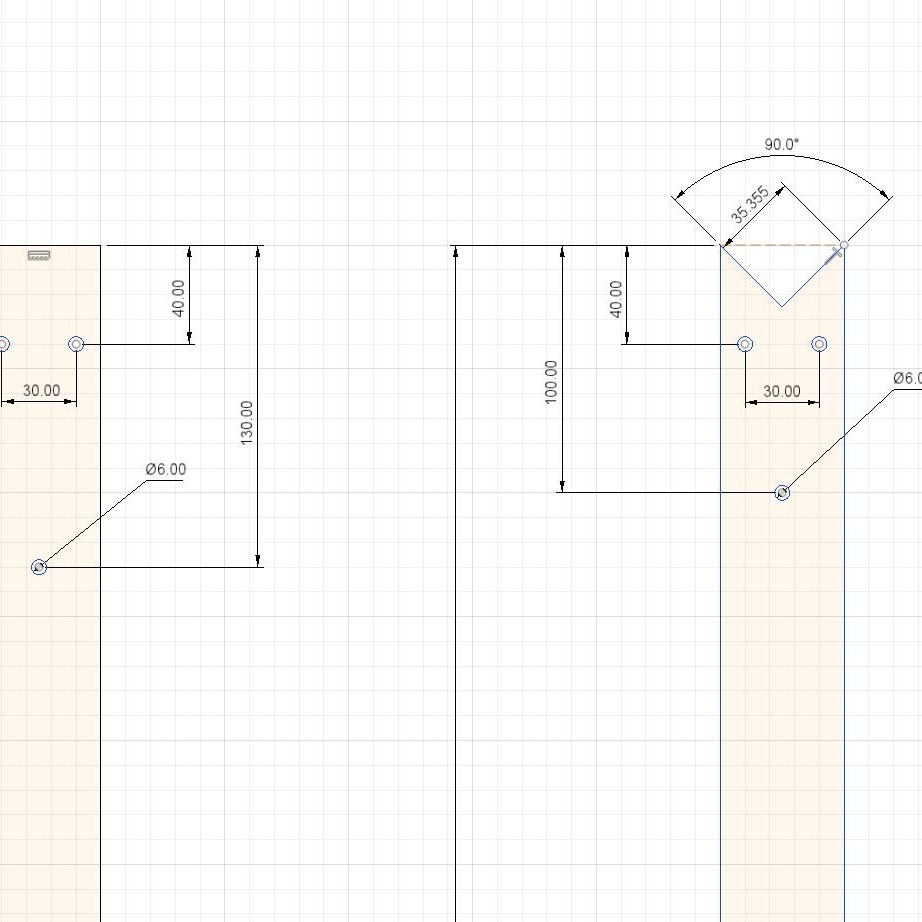
Steg tre: Montering av tallrikar
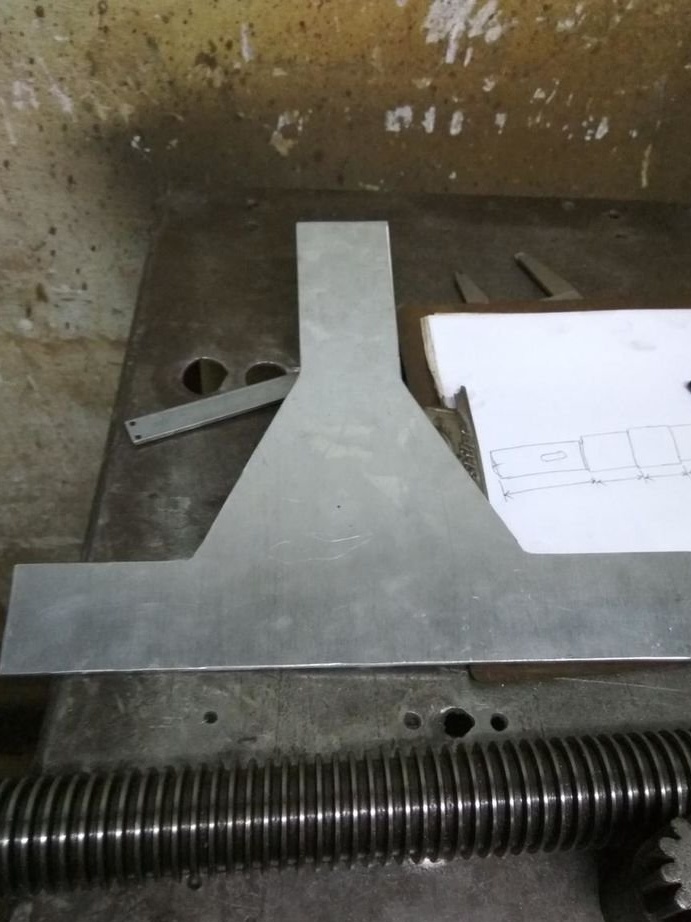
För konsoler använde mästaren aluminiumplattor på 1,5 mm. Det finns åtta konsoler totalt, fyra i hörnen och fyra i mitten av ramen. Längden på armskuld och stöddel är 15 cm vardera. Konsolerna är utformade i Fusion 360. Plattorna skars med en fräs. Monteringshål borras i dem. Därefter svetsades fästena fast vid ramen.






Steg fyra: Carrier-profil
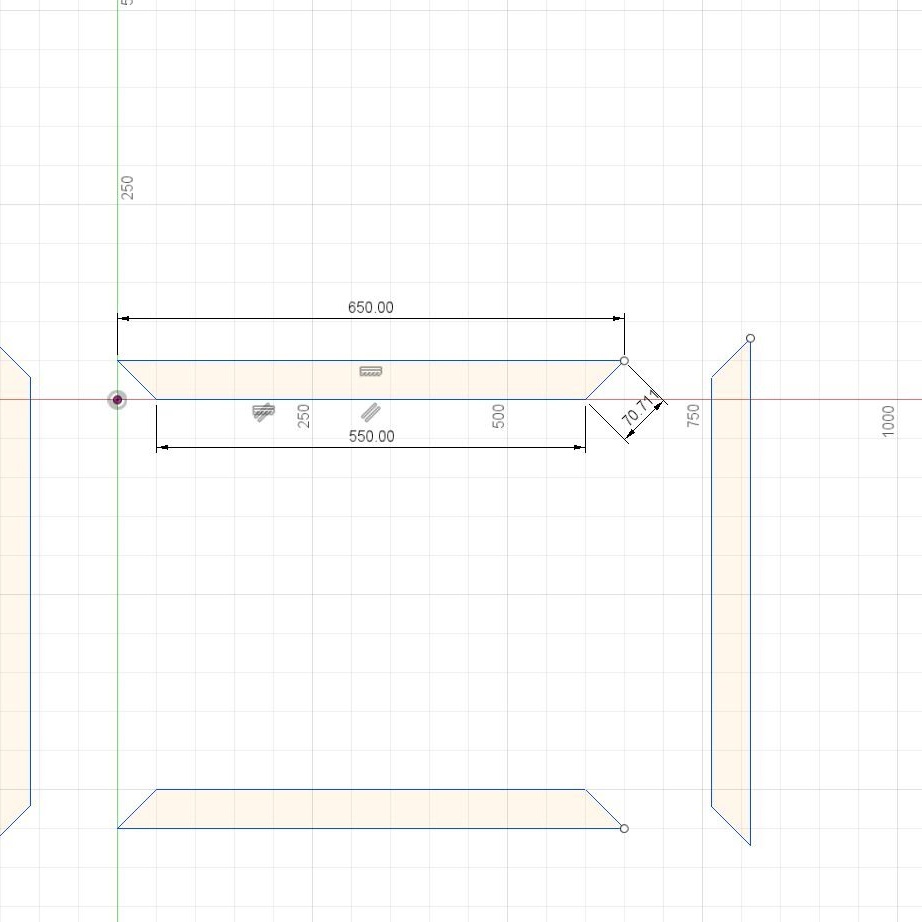
Dessa profiler är fästa vid konsolerna och motorerna installeras i deras ändar. Profilerna är kvadratiska, 50 X 50 cm och har olika längder. Profiler 112,5 cm långa är fästa i hörnen, 125 cm i profil på sidorna. En utskärning görs i vinkelprofiler i en vinkel på 45 grader. Det är nödvändigt att dess ändyta är angränsande till vinkelplanet.
För att fixera profilerna på konsolerna borra masteren hål för bultarna.




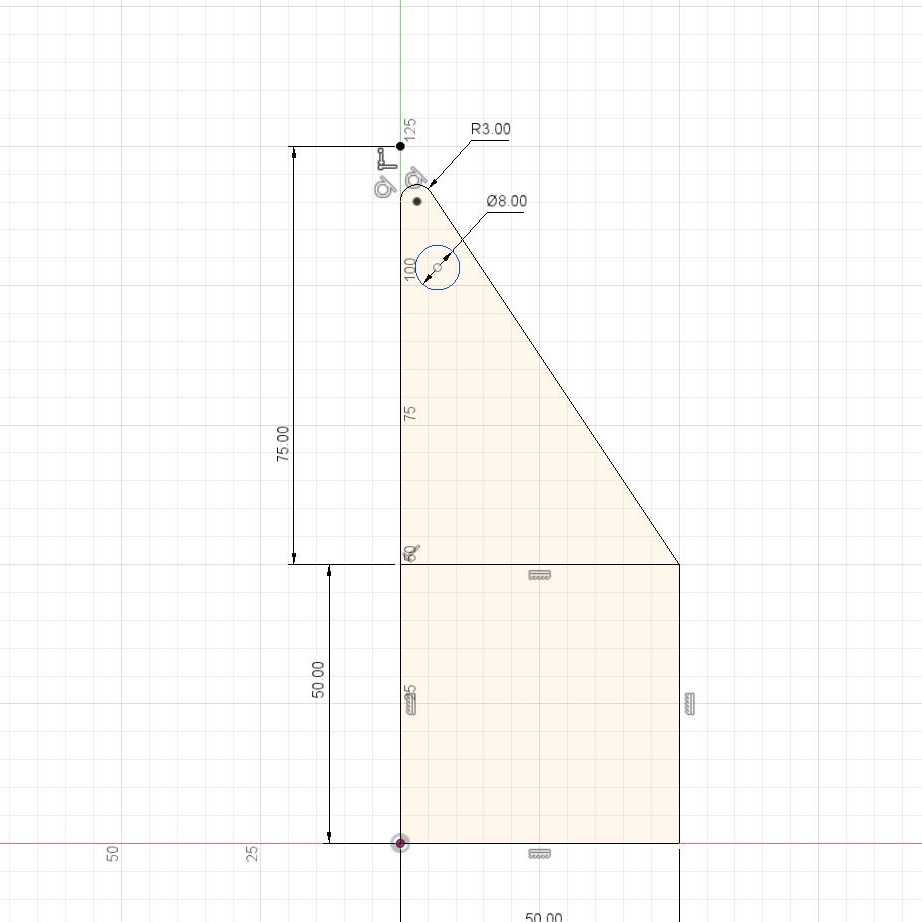
Steg fem: Motormontering
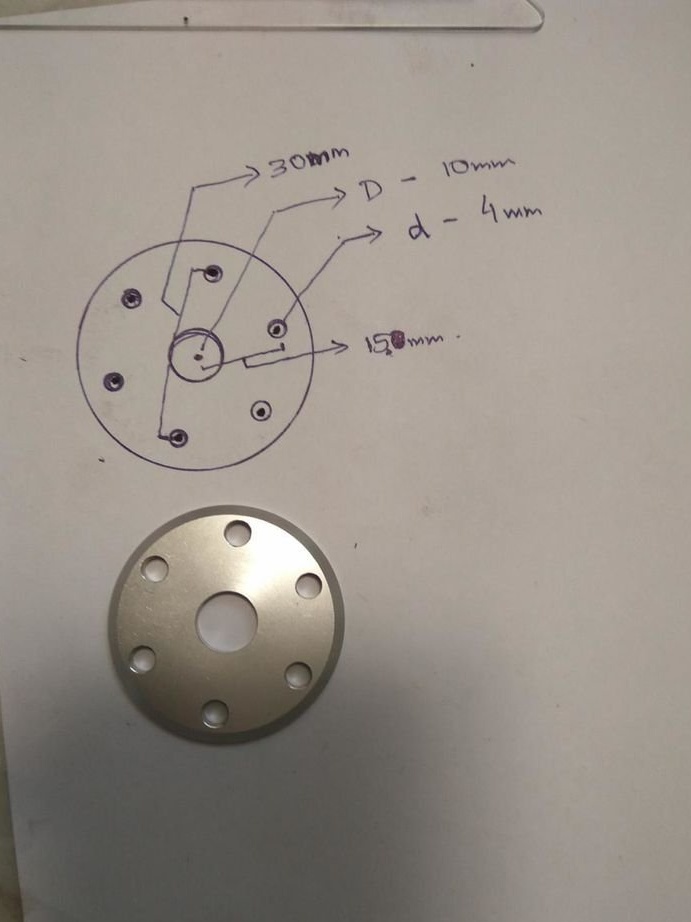
Motorer skruvas fast på en fyrkantig aluminiumplatta. Från plattans botten, parallellt med varandra, skruvas två hörn. Avståndet mellan dem är lika med profilens bredd. Vidare är plattan med motorn monterad på profilen, monteringshålen borras och allt vrids med bultar.





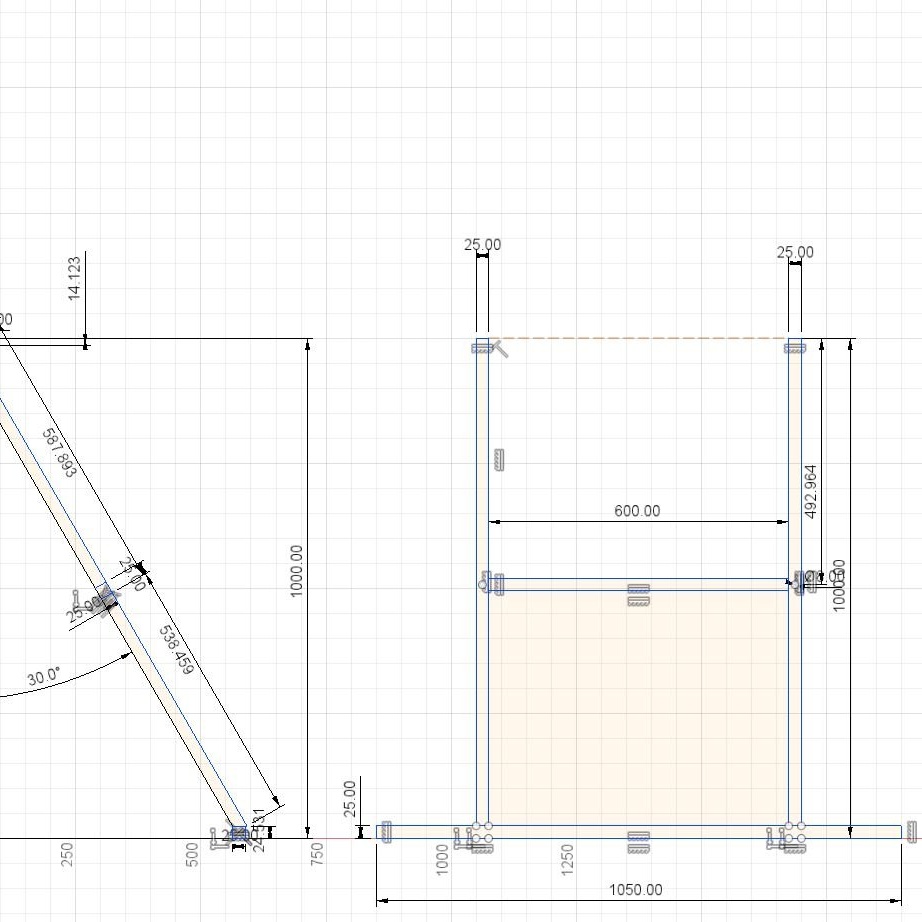
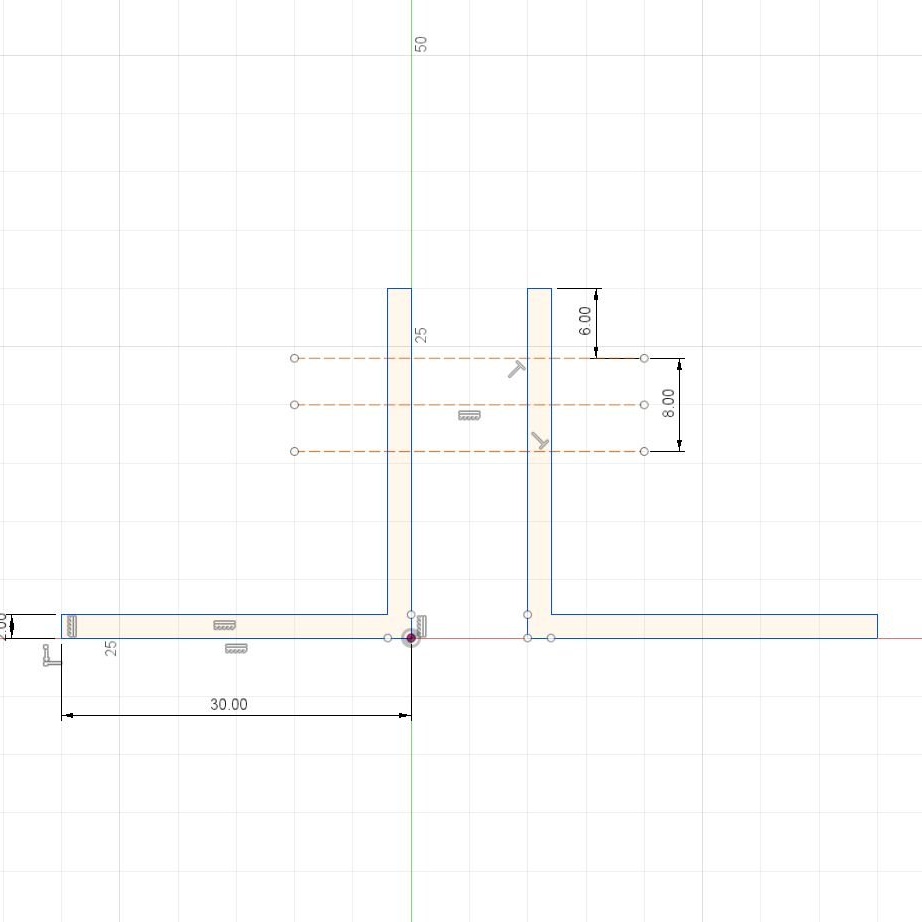
Steg sex: Chassi
Chassiet var tillverkat av aluminiumprofiler 25 x 25 mm och en tjocklek på 3 mm. Alla delar svetsades, och deras storlekar kan ses på fotot. Tanken var att montera chassit ur korgen i en vinkel på 30 grader. För att förhindra skador på chassit dras stödkablar mellan dem.


Steg sju: Stödja supportprofiler
Efter montering av motorerna började stödprofilerna att böjas. Sedan försökte befälhavaren att starta motorn och fick reda på att profilerna "går". Det var nödvändigt att stärka designen.
Att lägga till plattor skulle lägga till för mycket vikt till strukturen. Sedan bestämde befälhavaren att göra en V-formad design från korgen och ner. Linorna är fästa vid dess undre del. De andra ändarna av kablarna är fästa vid konsolerna i mitten av stödprofilerna. Kablar dras med en lyftanordning. Således blir strukturen styv.















Steg åtta: Anslut
Först säljer befälhavaren kontakterna till trådarna.


Sedan börjar installationen. Varje motor måste kontrolleras för rotationsriktning. Om det är nödvändigt är det lätt att ändra motorns rotationsriktning, och följaktligen skruven, genom att byta två av de tre ledningarna som kommer från ESC till motorn. När alla motorer var korrekt anslutna gjorde guiden installationen enligt anslutningsdiagrammet från tillverkaren.
Flygstyrenheter IMU DJI A3 är mycket känsliga för störningar från metaller och befälhavaren kunde inte konfigurera systemet på grund av störningar. Som ett resultat ersatte befälhavaren A3 med Naza M V2, som hade ett liknande anslutningsschema. Naza M V2 fungerade mycket pålitligt.
Sedan ansluter guiden batterierna. På varje bärarprofil är två 22,2 V-batterier anslutna i serie.



Steg nio: pilotsäte
Sitsen var sydd av hållbart tyg. Dessutom är ett säkerhetsbälte fäst vid piloten, som är fäst vid ramen, och en hjälm.






Steg tio: första flyget
Innan pilotens flygning på oktokoptern utfördes flera test med en sandpåse och sedan med en modell av en person. Under flygningen simulerades olika situationer från förlust av kontroll till ett vindkast.
Efter alla tester flög piloten slutligen upp i luften.






Innan du flyger måste du utföra följande åtgärder.
Kontrollera tätheten på bultar, kablar, motormontering.
Kontrollera ledningarna.
Kontrollera att skruvarna enkelt roterar.
Se till att alla ESC: er är inställda på.
Se till att alla batterier är ordentligt anslutna och laddade.
Anslut strömmen till flygkontrollen för initialisering och kalibrering.
När du har anslutit till GPS växlar den till helt automatiskt läge (Alt. + Att. Håll).
Sitt i pilotstolen och spänn dig upp.
Anslut alla batterier till ESC.
Anslut de två batterierna i serie (ESC-RB-RB-ESC) med ett motstånd för att eliminera gnistan.
Slå på motorerna genom att vrida omkopplaren till läget på.
Använd regulatorn för att styra octocopter.