Befälhavaren monterade denna fräsmaskin huvudsakligen av det material som han hade tillgängligt.
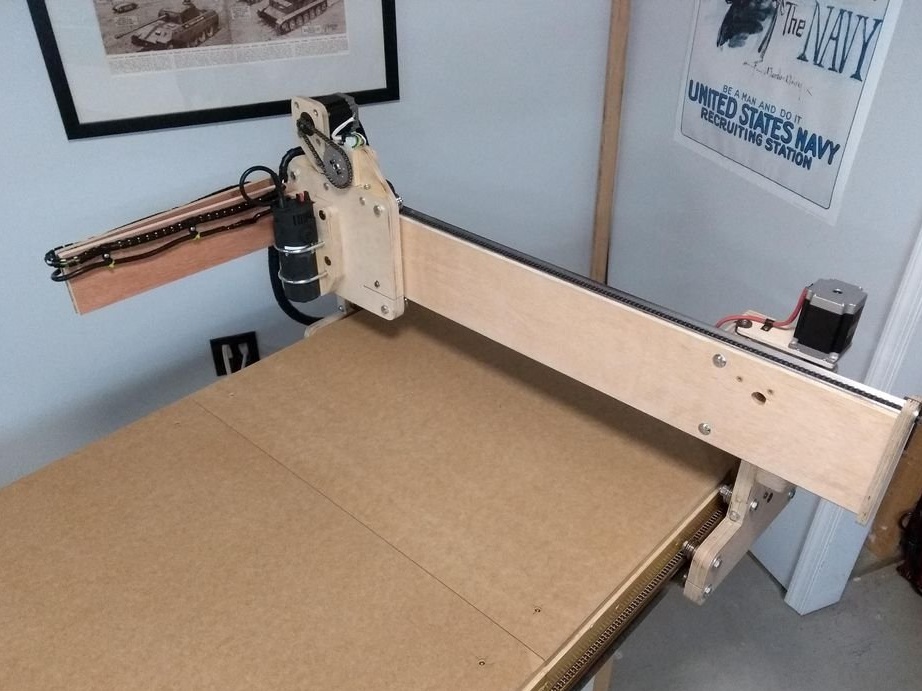
Detta är en klassisk fräsmaskin med tre axlar. Den har en portal som rör sig längs basens längd (Y-axeln). Det finns en vagn på vilken routern är monterad och den rör sig fram och tillbaka (X-axeln). Och det finns en mekanism som höjer och sänker routern upp och ner (Z-axeln). För rörelse använder befälhavaren stegmotorer och kedjor. För linjära skenor används stål V-lager som sträcker sig över ett stålhörn. Guiden ger inte detaljerade instruktioner, bara det allmänna konceptet och idéerna.
Verktyg och material:
- Nattbordet;
-Door;
-Roliki;
-Metalhörn;
-Fanera;
-Krepezh;
-Drel;
Frässkär;
-Pila;
seeing-;
-kedja;
-Gängad stång;
-Stappmotorer;
-Zvezdochki;
-Podshipniki;
-Adapter för en dammsugare;
-Arduino;
- Estlcam-styrenhet;
-Relaterat fast tillstånd;
-Kraftförsörjning;
-Steg drivrutiner;
Steg ett: tabellen
Befälhavaren återställde bordet från den gamla nattduksbordet. Som bänkskiva spikade befälhavaren en trädörr vid bordet. Nedan var installerade rullar.



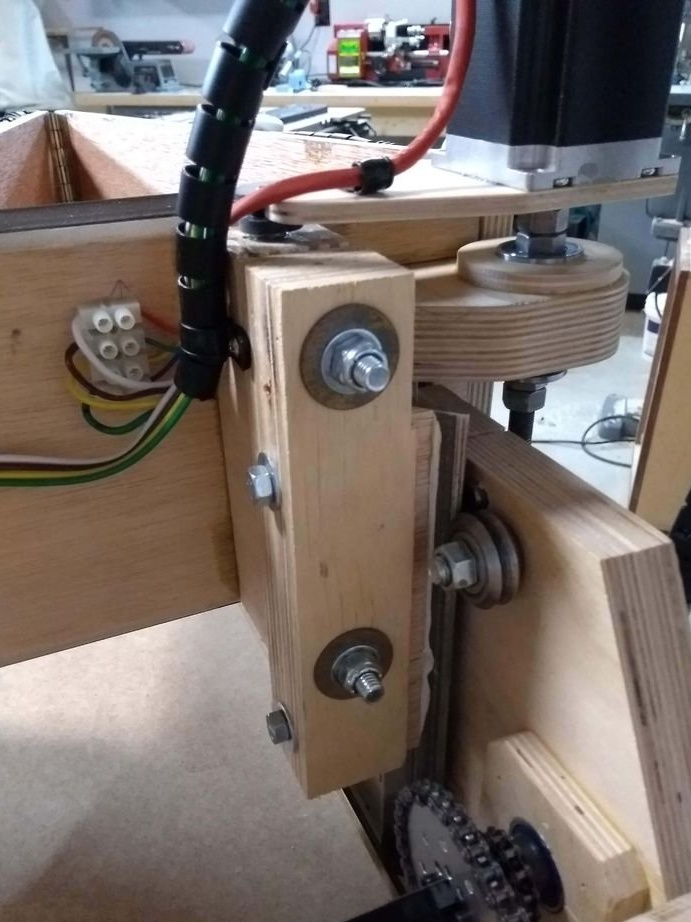
Steg två: Rails
Befälhavaren använder ett metallhörn som vägledning. På plywoodämnet fäster befälhavaren fyra lager med ett spår. Det är tydligt att hörnet är fäst på båda sidor om bordet.




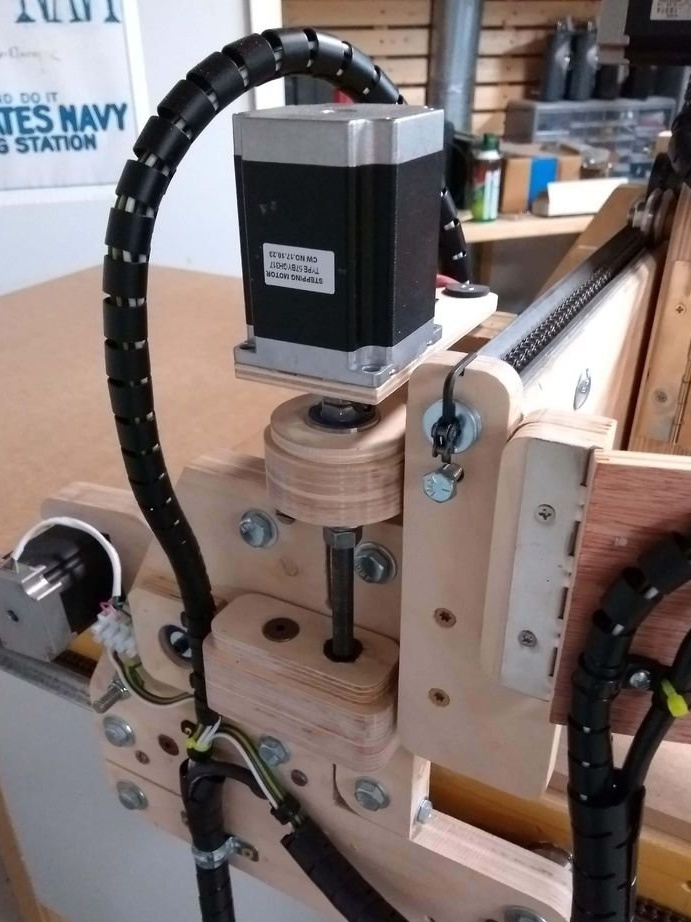
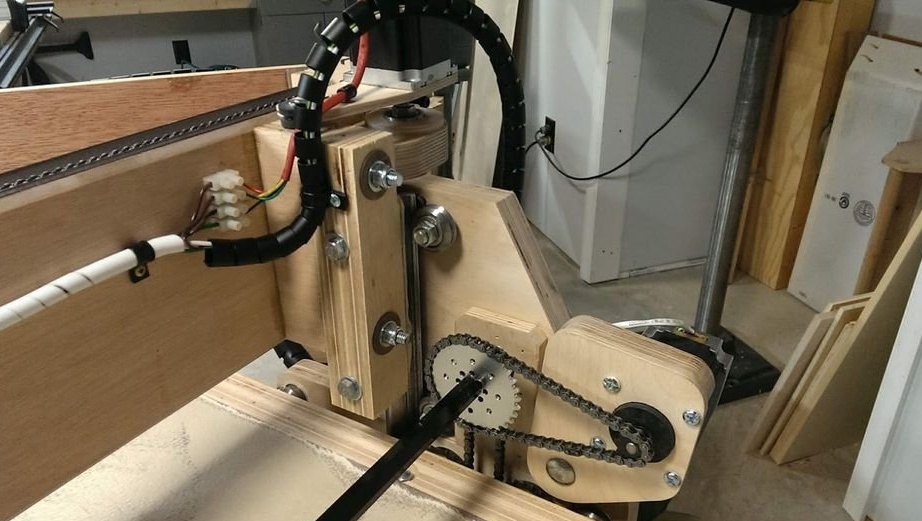
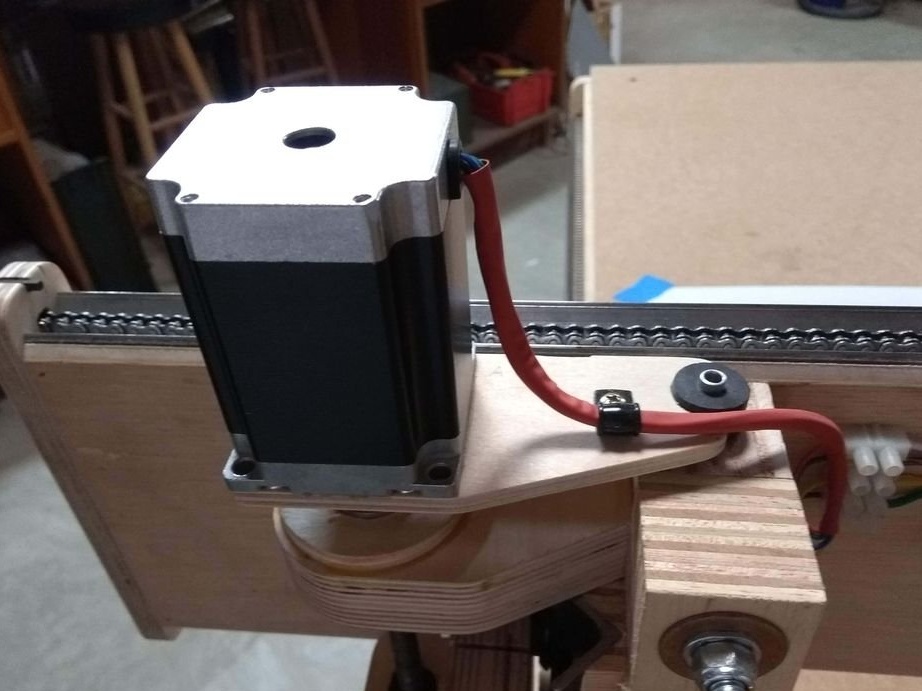
Steg tre: Portal
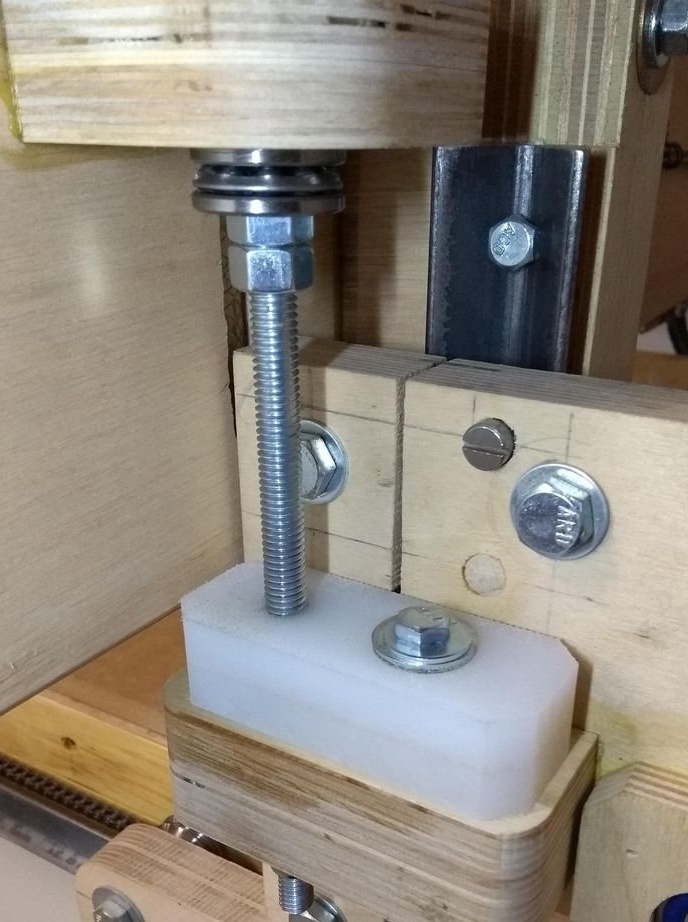
Portalen är uppbyggd av två lager av plywood limmade ihop. En fräs är monterad på portens tvärgående detalj. Den tvärgående delen, tillsammans med fräsen, rör sig upp / ner längs samma skenor som i föregående steg. Två stegmotorer är installerade för att röra sig längs kanterna. Befälhavaren säkrade långa bultar på motorernas axlar. Längst ner finns en knut med nötter. Vid ett kommando börjar motorerna att arbeta, axlarna roterar och fräsen sänks eller stiger.
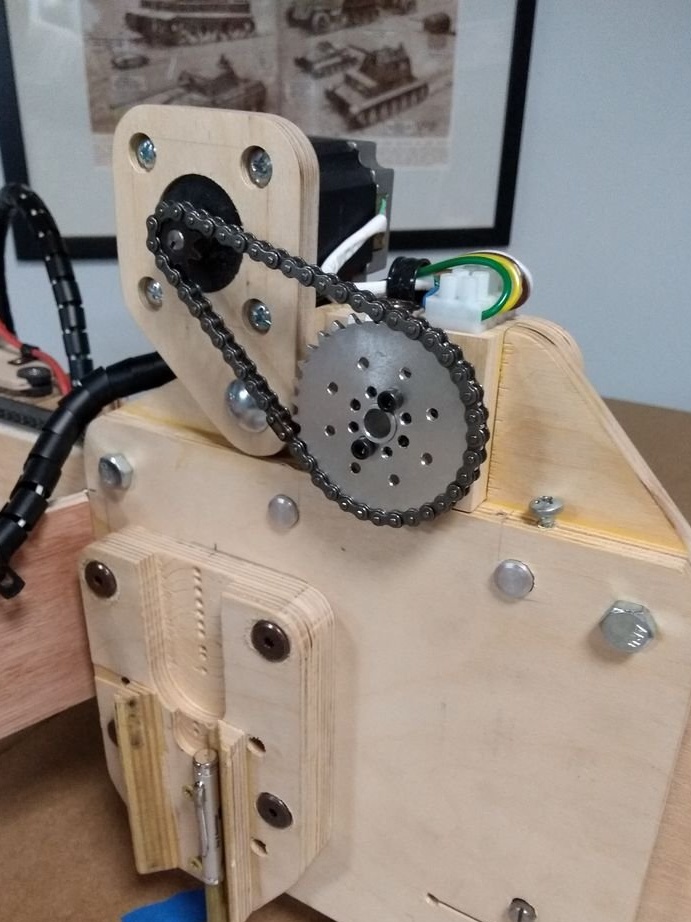
För att flytta vagnen med kvarnen på Z-axeln använder befälhavaren en stegmotor och en kedjedrev.





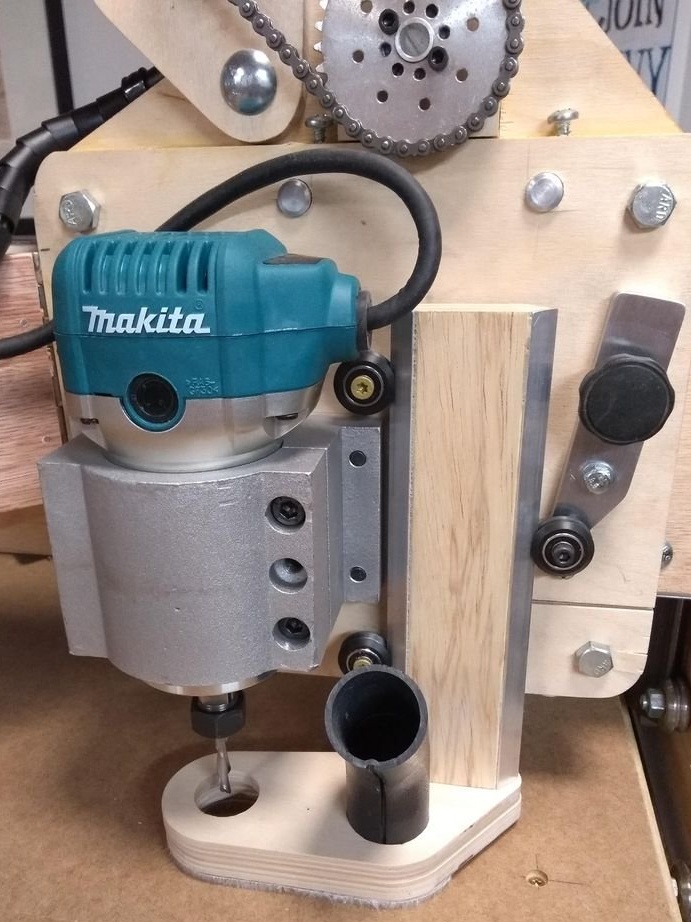
Steg fyra: Fräsning
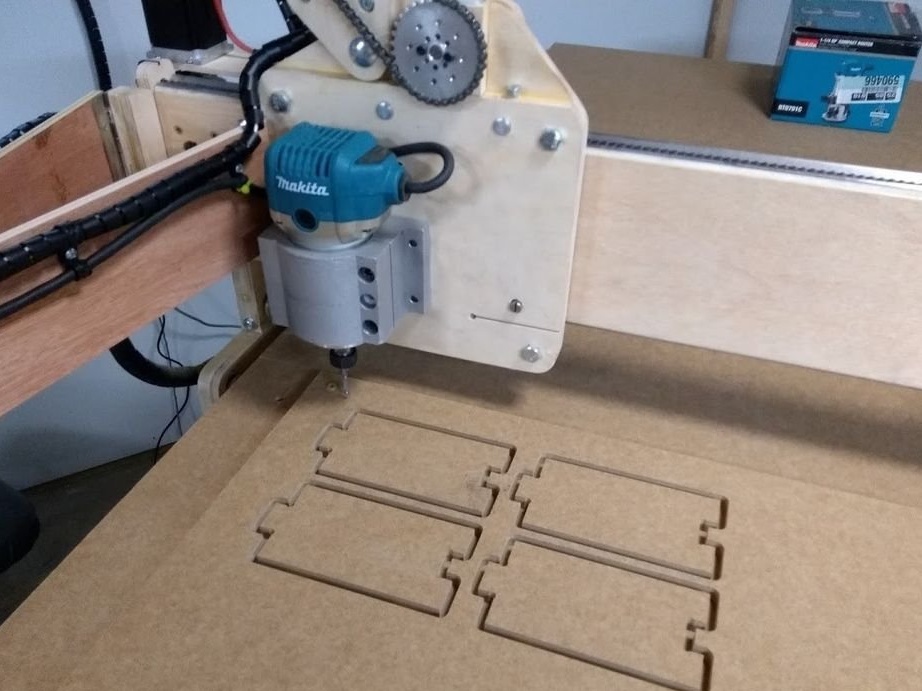
En Makita RT0701C-router är installerad på maskinen. Dessutom installerar befälhavaren en adapter för att ansluta dammsugarens slangar.



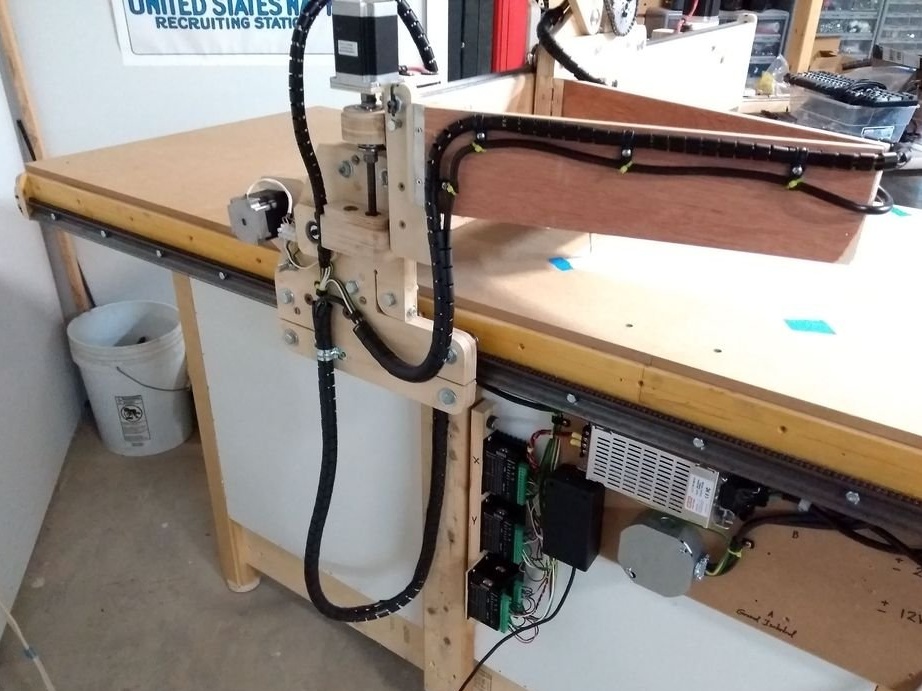
Steg fem: Management
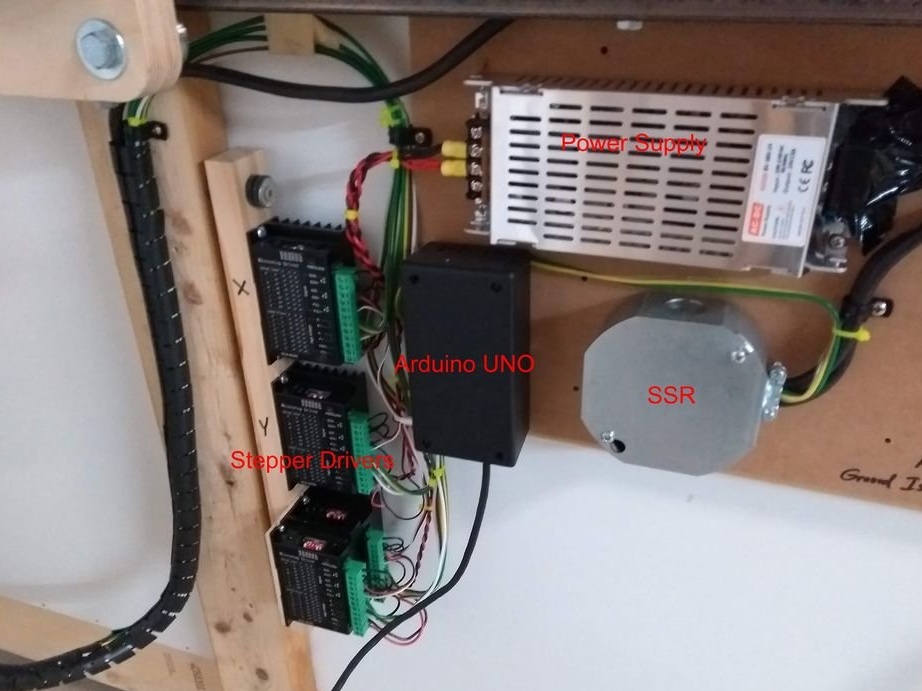
Hanteringssystem baserat på Arduino UNO och en liten dator med EstlCAM CNC-programvara.
Arduino Uno är monterad på baksidan av maskinen och stöder Estlcam-styrprogramvara. Den elektriska lådan innehåller en 10A SSR (Solid State Relay), som slår på och stänger av routern. Till vänster är TB6600 stegförare och en strömförsörjning 24 V, 15. A. Ledningarna till motorerna passerar genom korrugeringen. En Windows 10-dator visar bilden på monitorn och styrs av en trådlös mus och tangentbord.

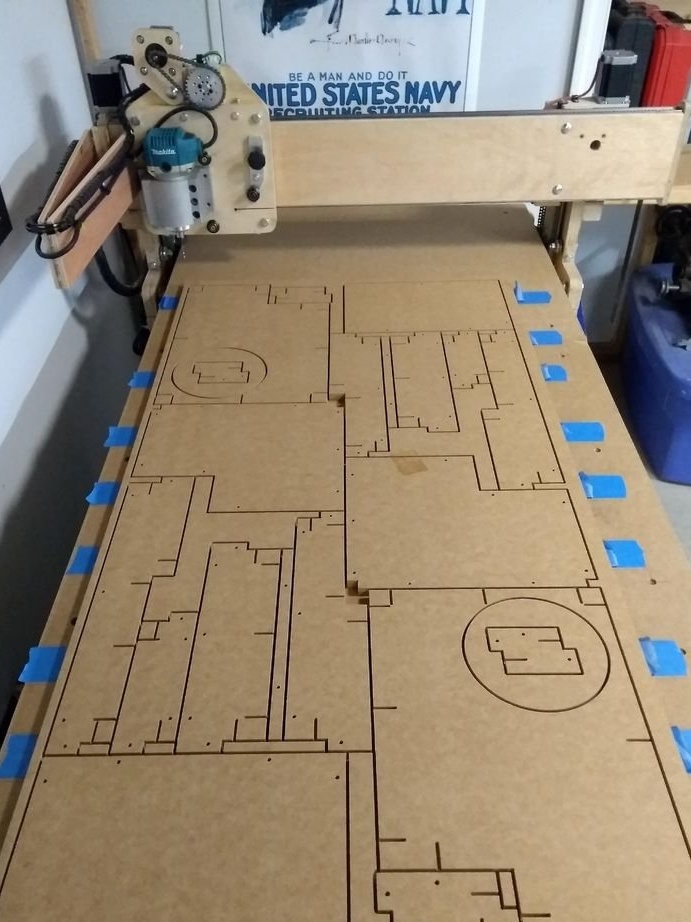
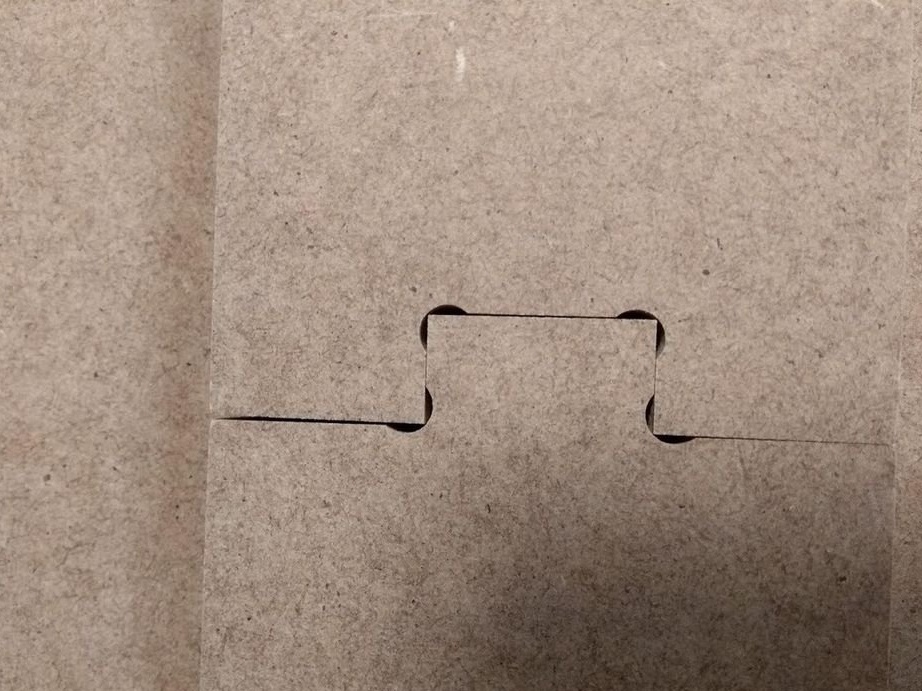
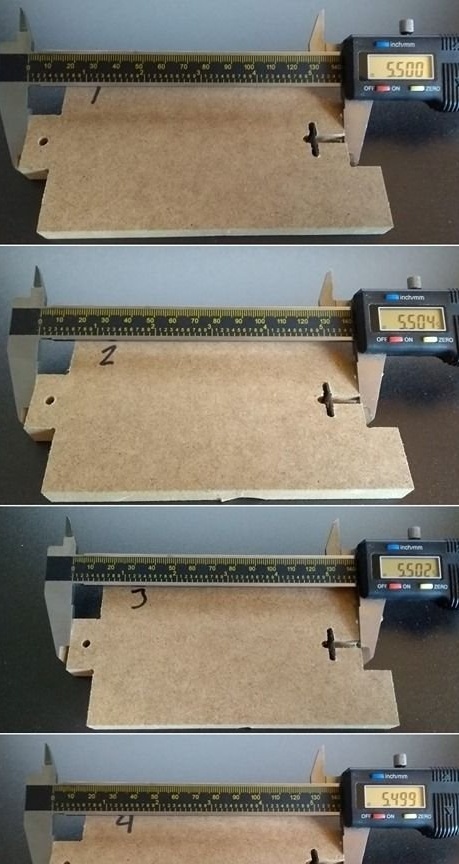
Enligt befälhavaren visade sig maskinen vara helt normal, det sista fotot visar exempel på hur maskinen fungerar.