

Pultoider kallas sådana robotar som kan fjärrstyras med fjärrkontrollen. Till exempel kan en TV-fjärrkontroll användas för dessa ändamål. Den viktigaste uppgiften som författaren ställde sig i tillverkningen av en sådan robot är enkelheten i dess montering. granskas roboten kräver inte tillverkning av ett tryckt kretskort, installationen är mycket enkel och händer bara på kartong.

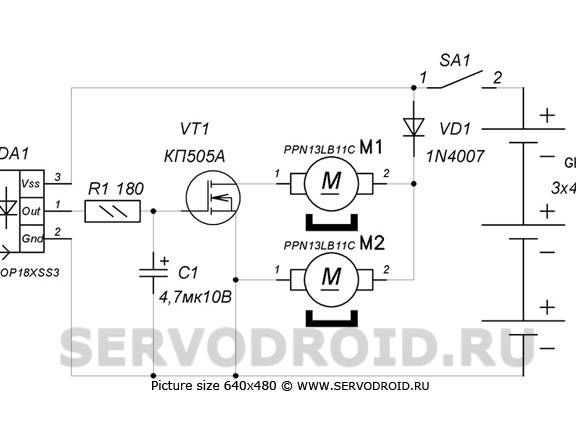
elektronisk Robotkretsen består av endast fyra komponenter: en diod, en transistor, en fotodetektor och en kondensator. För tillverkning av den mekaniska delen krävs också ett minimum av material, till exempel används en CD-ROM för att göra fallet.
En robot tillverkad på detta sätt kommer att förstå bara ett team. Det är värt att trycka på valfri knapp på kontrollpanelen så kommer roboten att börja vända. Om du fortsätter att hålla ned knappen kommer rotationsvinkeln att bli större, vilket kan leda till att roboten kan vrida 360 grader.
Robotenhet
En kompaktskiva används som bas för tillverkningen av roboten. När det gäller kraftelementen är de fästa med M2-bultar. Det elektroniska kortet, även batterifacket, fästs med band.
När det gäller motorerna är de placerade i en vinkel och deras axlar vilar mot vägen. Det finns således inget behov av att separat tillverka hjulen. Bultar fästs med ramar som är gjorda av en skollinje.
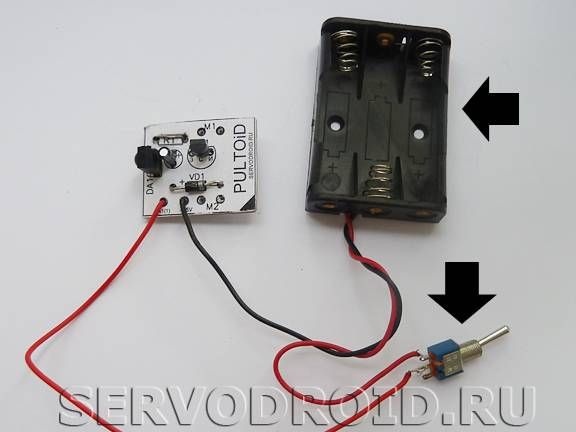
Tre "lilla finger" -batterier matar roboten, de är installerade i ett speciellt fall. Totalt producerar strömförsörjningen 4,5 V.
Och slutligen, fotodetektorn, det är bara en här, det är en typ av TSOP. Den tar emot modulerade signaler från vilken fjärrkontroll som helst, tack vare vilken roboten kan styras.
Material och verktyg för tillverkning:
- nylonband;
- fotodetektortyp TSOP1836;
- en fälteffekttransistor (KP505A);
- en kompakt skiva;
- fular för batterier i tre sektioner;
- tre "små" batterier;
- plast linjal;
- skruvar för att fästa ramen;
- ledningar och omkopplare (överkorsningstyp).
Tillverkningsprocess:
Första steget. PCB-design
För att skapa ett tryckt kretskort måste du först skriva ut en ritning på papper. Du bör få två bilder, på en installationsritning och på den andra sidan av brädet. Totalt kommer brädet att bestå av tre element, i mitten kommer det att vara en wellpapp limmad med kontorpapper på båda sidor. För att limma brädet rekommenderas det att använda en torr limpinne.
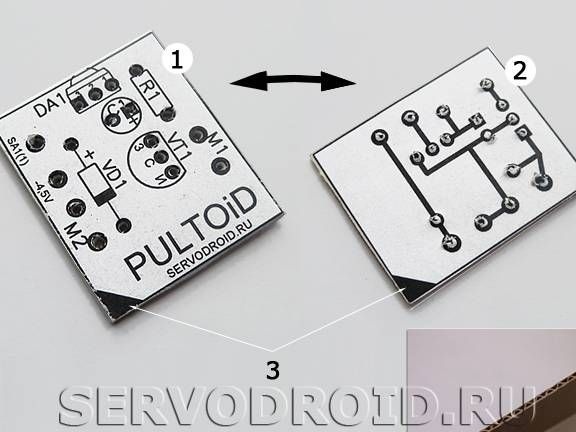
Steg två Installation av radiokomponenter
När du installerar elektroniska komponenter är det viktigt att du inte glömmer eller skär bort de utskjutande kanterna på kontakterna. Därefter kommer de att böjas, och därmed skapas en elektrisk krets. Alla element är anslutna genom lödning enligt det angivna schemat.
Motstånd R1 i kretsen måste bytas ut mot valfri bygel. När det gäller fotodetektorn visas också rätt ordning på dess anslutning på fotot.

Steg tre Installation av kraftram
För att installera motorerna måste du skapa en strömram. Som material kommer en plastskolareal här att användas. Det måste skäras i två delar och böjas som anges på bilden. För att få linjalen att börja böjas måste du föra den heta lödkolspetsen till en avböjningsplats på ett avstånd av cirka 2 mm. Även för dessa ändamål kan du använda en hårtork för konstruktionen. Linjalen måste böjas smidigt till en vinkel på cirka 30 grader.
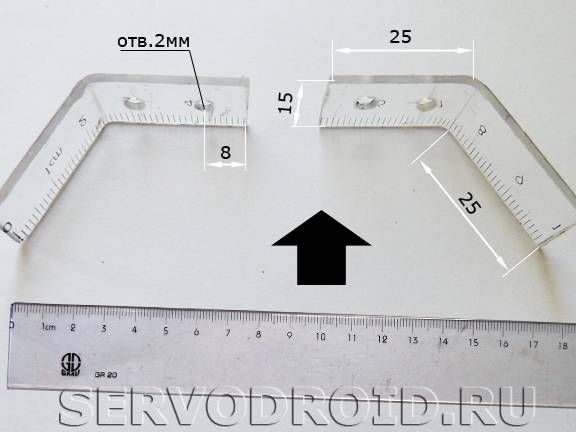

När ramen har skapats kan du fortsätta med installationen. För att göra detta, ta CD och 2 mm skruvar med muttrar. Vidare borras hål med en diameter på minst två millimeter på rätt plats och ramen fixeras med skruvar. Så att ramen inte glider, innan du installerar den måste du fästa dubbelsidig tejp på skivan.
Steg fyra Installera det främre stödet
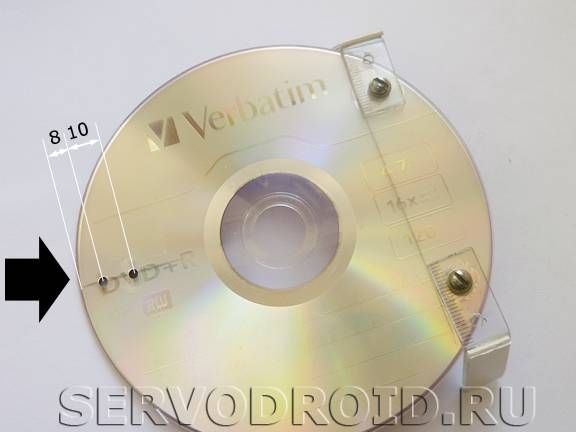
På skivans framsida måste du borra två hål och förbereda en nylonavlagring. Måttstorleken ska vara 3x150mm. Det måste sättas in enligt bilden. Som ett resultat kommer det resulterande stödet att försvinna perfekt under roboten och glider längs vägen.


Steg fem Motorinstallation
För att förhindra att motoraxlar glider längs vägen måste skydd placeras på dem. De är tillverkade av gummi, som finns på pastor av heliumpennor. För att installera motorerna måste du först limma en bit dubbelsidig tejp på stödet, det förhindrar att den glider. Tja, då är motorerna äntligen fixerade med nylonband.

Steg sex Brytare och strömförsörjningsanslutning
Som strömkälla kan du använda alla batterier vars ström inte överstiger 5 volt. I detta fall används ett fodral för tre fingerbatterier, som totalt 4,5 V.
När det gäller omkopplaren är den monterad på spalten på den positiva kontakten som kommer från kraftkällan. Den röda ledningen är fäst på kortet för att stift SA1 (1) och den svarta tråden till stift -4,5V.


Även i detta skede kan du ansluta motorerna, deras kablar är anslutna till kontakterna M1 och M2.
Sjunde steget. Sista etappen
I det sista steget måste alla elektroniska element fixas. De är anslutna till disken med dubbelsidig tejp. När det gäller omkopplaren måste den också fixas, för detta kan du använda hetlim.

Det är allt, nu är roboten klar. Du kan försöka slå på den och ge ett kommando att aktivera med valfri fjärrkontroll.