
Det särskilda med BIBOT-1-roboten är att den kan utföra två uppgifter. Det kan röra sig bakom en ljuskälla eller längs en svart linje som kan dras på papper. Roboten mycket flexibel i inställningar, det vill säga senare kan den anpassas till alla önskade förhållanden, det vill säga för att göra den mer känslig för ljus eller mindre. Det är också möjligt att justera motorernas rotationshastighet, detta gör att roboten fungerar bättre, särskilt när du rör dig längs linjen.

Enheten och robotens princip:
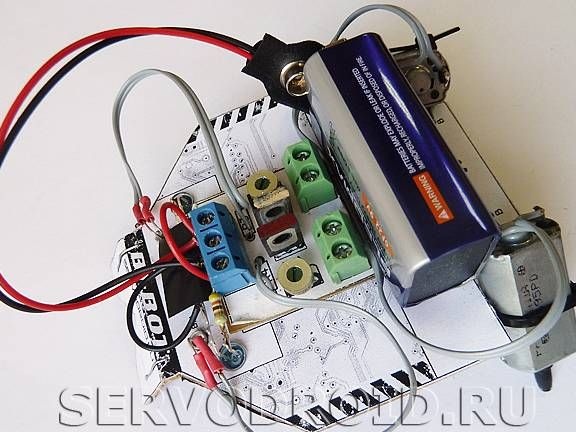
Robotens bas är gjord av kartong, mallen skrivs ut på skrivaren och kraschar sedan. När det gäller modulen med radiokomponenter togs en textolit som bas, modulen är fäst vid robotens bas. För att göra kroppen styvare används speciella revben i designen.
Motorer installeras som i de flesta av dessa DIY, det vill säga i en vinkel. På grund av detta finns det inget behov av att sätta hjulen och växellådan. För att förhindra att axlarna glider över ytan sätts skydd på dem.
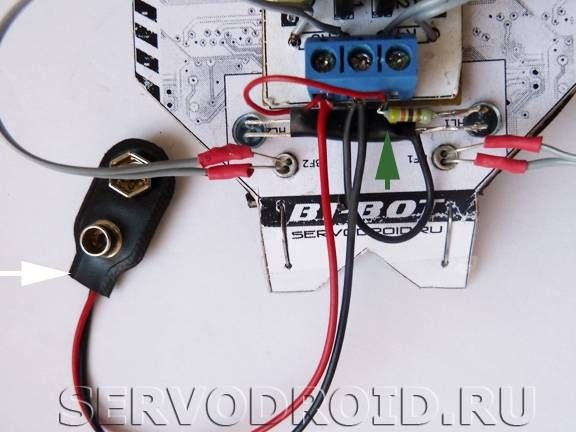
Ett 9V-batteri av typen 6F22 används som strömkälla. Batteriet är anslutet med tejp och är alltid tillgängligt för enkel byte.
När det gäller omkopplaren, då bilar beslutade att undvika att installera det. Roboten slås av och på genom att manipulera klämman som fästs på batteriet.
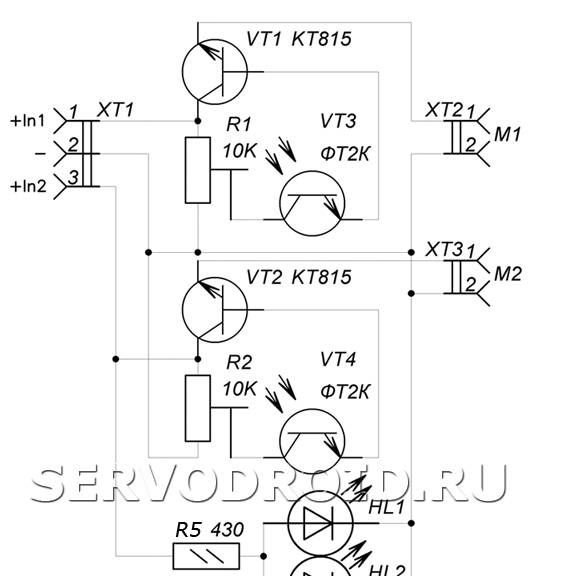
Och slutligen justeringen av roboten. För att justera robotens känslighet har systemet två justeringsmotstånd. När de roterar kan du justera robotens känslighet för ljus, och du kan också justera motorernas rotationshastighet. Ju mer känslig roboten är för ljus, desto snabbare kommer den att röra sig och vice versa.
När det gäller driftsprincipen anges allt i diagrammet.
Material och verktyg:
- 9V batteri och klämma för anslutning;
- två anslutningar för anslutning av motorer (tvåsektionsplintar);
- motorer;
- nylonskik;
- skydd (gummirulle);
- två fototransistorer;
- två infraröda lysdioder;
- en konsol från en häftapparat;
- tre-sektionsplint för strömförsörjningsanslutning;
- inställningsmotstånd.

Tillverkningsprocess:
Första steget. PCB-design
Avgiften skapas med LUT-metoden. Innan arbetet måste glasfiberytan rengöras noggrant och sedan tvättas och torkas noggrant. Efter tillverkning måste ledningsspåren kontrolleras med en multimeter för en kortslutning.
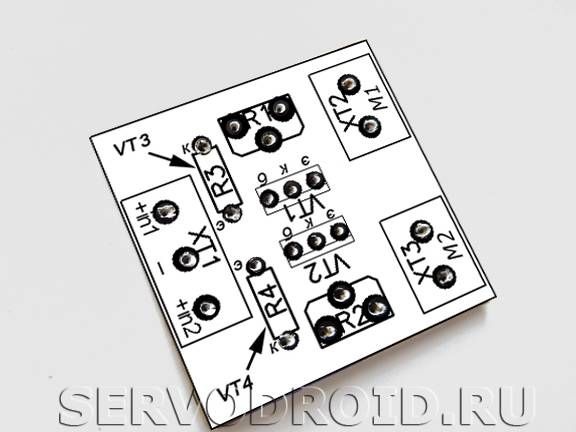
Steg två installation elektronisk elementet
Därefter måste du ta en ritning tryckt på papper och fästa den på det skapade kortet. I detta fall måste hålen på papperet och i kretskortet matcha exakt. Därefter installeras radiokomponenterna som visas i diagrammet. I arbetet måste installationen av motstånd R3, R4 installera fototransistorer VT3, VT4.
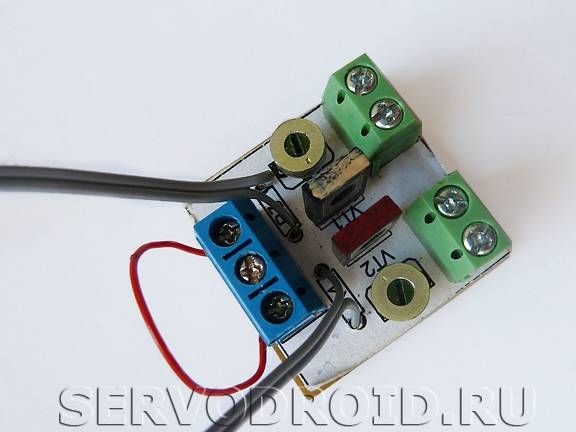
Extremsektionerna i det tredelade anslutningsblocket XT1 måste anslutas med en monteringsledning. Kontakternas anslutningspunkter måste vara välisolerade, det är bäst att använda ett värmekrymprör för dessa ändamål.
Steg tre Hur man skapar ett ärende
En ritning av kroppen måste tryckas på ett vanligt ark A4-papper. Därefter måste du ta en bit korrugerad kartong och klicka på en ritning på den, därefter måste fallet skäras runt omkretsen.
Där "sax" -piktogrammet är placerat längs djärva linjer, bör skärning göras. Därefter, längs de svarta prickade linjerna, måste du böja kartongen som på fotot och sätta de svarta pilarna.



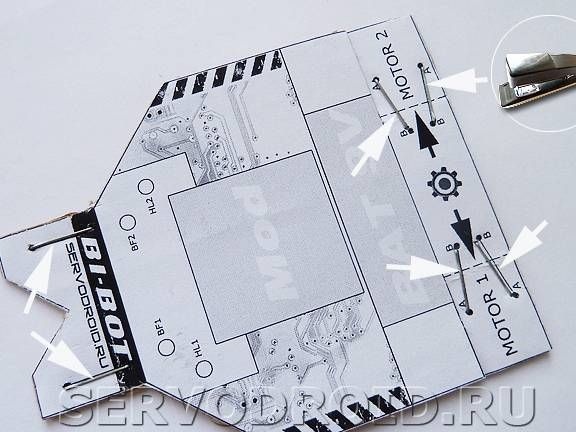


Framsidan och baksidan av huset till det angivna läget med en häftapparat, du måste installera konsolerna. Platserna för deras installation är markerade med svarta linjer med cirklar. Häftklamrar behövs för att göra ramen styvare. Efter montering av konsolerna är de tråkiga att böjas längs viklinjerna.
På de platser som är markerade BF1, BF2, måste du göra hål för installation av fototransistorer. På platser HL1, HL2 måste du göra hål av en sådan storlek att de passar diametern på höljet på infraröda lysdioder.
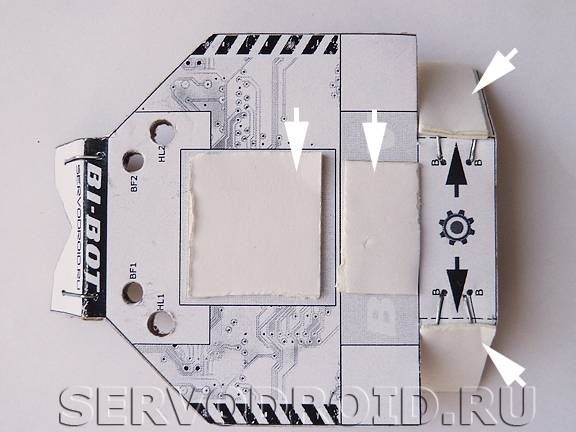
På de platser som är betecknade som Mod "," BAT 9V "och" MOTOR 1 "," MOTOR 2 "fäster remsorna av dubbelsidig tejp.
Steg fyra Installation av motorer
Motorer är monterade i läge med nylonband. För att förhindra att axlar glider måste de bäras med skydd. De är gjorda av gummiband, som finns i pennorna. Löd trådarna till motorerna i samma steg.


Steg fem Installation av infraröda lysdioder
När du installerar infraröda lysdioder är det viktigt att inte förvirra deras slutsatser, för importerade element är en lång kontakt en anod, det vill säga ett plus. Lysdioder installeras på positionerna HL1, HL2 som visas på bilden. Resultaten är böjda så att dioderna kan anslutas parallellt.
Ett motstånd på 430 ohm måste lödas till lysdiodernas positiva kontakt och en svart tråd till negativ kontakt.
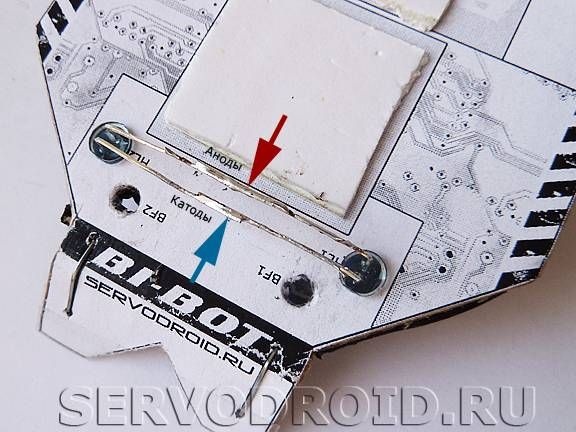
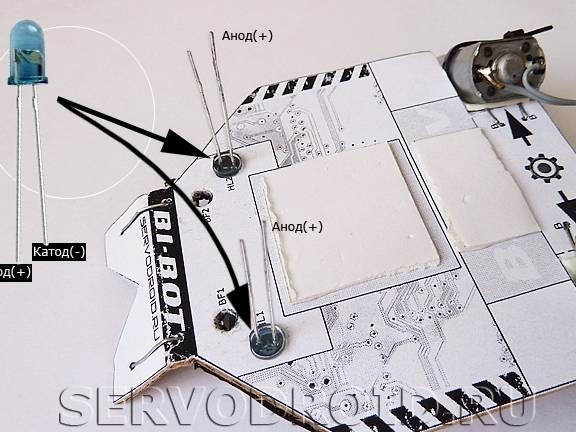
Den andra änden av den svarta tråden måste vara ansluten till mittstiftet på det tredelade anslutningsblocket. När det gäller motståndets utgång är den ansluten till terminalen på terminalblocket.
Steg sex Slutlig byggfas
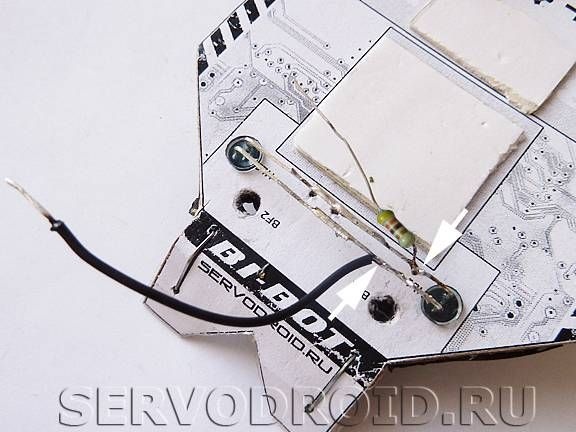
För att roboten ska röra sig längs linjen sätts fototransistorerna på plats BF1, BF2 som på fotot.
Transistorer för rörelse bakom ljuskällan placeras på baksidan.
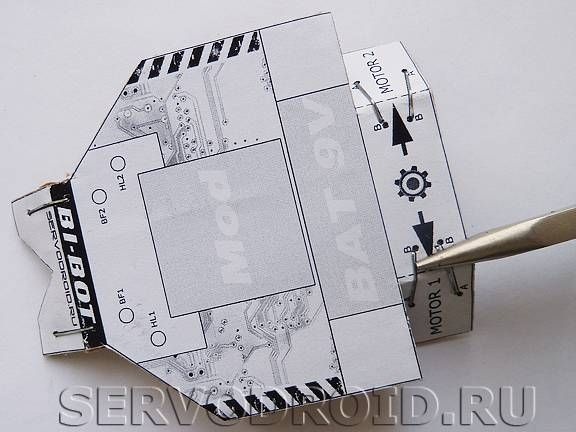
Sammanfattningsvis är motorerna anslutna och batteriet sätts in.


Det är allt, roboten är redo. Nu kan du försöka slå på den och konfigurera den till önskade förhållanden.