

I videon kan du se hur roboten fungerar. Den byter gradvis färg under drift.

Material och verktyg för montering av roboten:
- U-formade monteringsfästen;
- fyra 1,5V LR44-batterier vardera;
- RGB-LED med flera färger med omkopplingsfunktion;
- isolerande rör;
- stålnålstål;
- lågspänningsmotortyp RF-300CA;
- knapp för att slå på roboten (med två ledningar);
- Ledningar för anslutning av motorn;
- blinkande larm-LED.
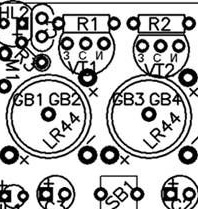

När det gäller det nödvändiga elektronisk element visas de i figuren. Det tryckta kretskortet är tillverkat av ett folieark av PCB, dess mått är endast 30X30 mm. Författaren rekommenderar också användning av små polära kondensatorer för montering.
Robottillverkningsprocess
Första steget. Schematiskt diagram över roboten
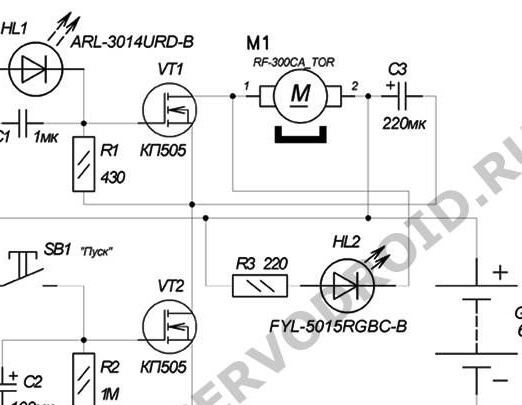
Robotkretsen kan ses i figuren. Efter att batteriet har satts in är roboten i läge, för att slå på den, tryck på SB1-knappen. Omedelbart efter detta laddas kondensatorn C2 direkt. Den positiva plattan från kondensatorn är ansluten till grinden till fälteffekttransistorn VT2. I detta avseende, när omkopplingströskeln uppnås, minskar motståndet för dräneringskällan i denna kanal direkt och en negativ potentiell laddning bildas vid avloppet. Vad som händer härnäst kan ses mer i diagrammet.
Steg två Montera RGB LED
Lysdioden under nummer 1 är monterad på kretskortet. På ritningen kallas denna position HL2. Efter att lysdioden är installerad måste dess slutsatser böjas så att lysdioden riktas mot sidan. Under drift kommer lysdioden inte att lysa upp, utan åt sidan och lyser upp väggarna. I vilken riktning ljuset kommer att lysa indikeras med en svart pil.

Steg tre Montera batteri monteringsfästen
För att ge kontakt mellan batteriet och roboten används tryckstift.En knapp är installerad i mitten, i diagrammet är den markerad som GB1, GB2, och den andra är inställd på position GB3, GB4. För att säkert fixa kontakterna lödas knapparna med en stor mängd löd.


Batterier är installerade på metallknappen under numret 3. Batterierna är fixerade med ett U-format fästelement, på vilket isolatorer från rören bärs. Den övre delen av konsolen måste vara böjd något med en båge nedåt, detta gör att batterierna kan pressas till den nedre kontakten. Isoleringsrör behövs så att de vertikala ytorna på batterierna inte kommer i kontakt med horisontella.
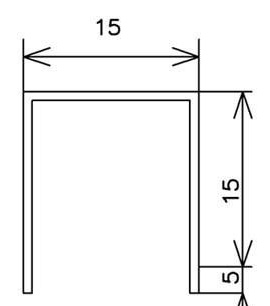
För att skapa ett U-format fäste måste du använda två gem. De måste böjas till en U-form, som anges på ritningen. Vilka rör som helst kan användas, polyvinylklorid används här. Deras höjd ska vara lika med batteriets höjd.
Montera fästet genom att lödas, för detta måste du tina dess ändar. För konservering är det nödvändigt att använda ett neutralt flöde utan tvätt.
Steg fyra Installera motorn
Motorn är installerad på den sida av kortet där spåren passerar, den är placerad med axeln nedåt. För att fästa motorn kan du använda hetlim eller dubbelsidig tejp. Men innan du monterar ordentligt motorn måste du ansluta den och kontrollera hela systemet för driftskompatibilitet.

Steg fem Installation och testning hemlagad
Efter montering av roboten kan du testa och konfigurera. För att göra detta måste du installera batterier i roboten, de är installerade i stället för GB1, GB2 och GB3, GB4. I detta fall måste elektroniken vara i off-läge. Efter installation av batterierna kan roboten slås på, detta görs med SB1-knappen. Efter att ha tryckt på den bör motorn börja arbeta, HL1-LED blinkar och RGB-LED lyser också.
Efter en tid stängs roboten automatiskt av, den stannar och alla dioder slocknar. Den slås sedan på på samma sätt som för första gången genom att trycka på en knapp.

För att justera robotens tid måste du experimentera med värdena på motstånd R2 och kondensator C2, de ansvarar för denna funktion. Om du behöver ställa in robotens maximala funktion, bör kondensatorn vara så stor som möjligt. På ett så enkelt sätt kan du montera en så intressant robot.