
Den här roboten styrs av Bluetooth-smartphone. Snabbmätaren på smarttelefonen mäter telefonens vinkel till vänster / höger, upp / ner, använder denna information för att beräkna hastigheten på riktningsmotorer, data överförs via Bluetooth till Arduino
Vad du behöver för att bygga en robot.
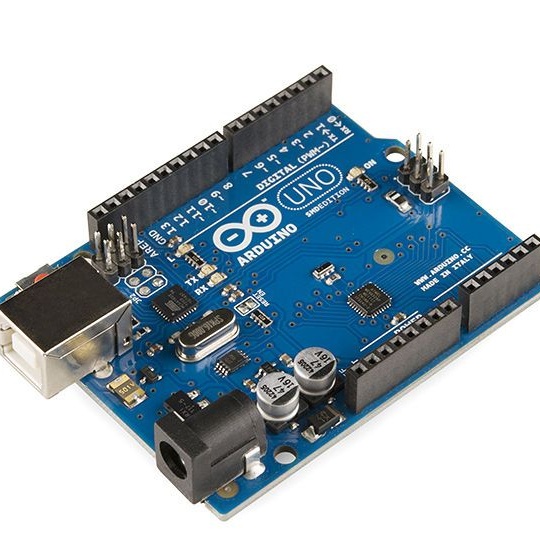
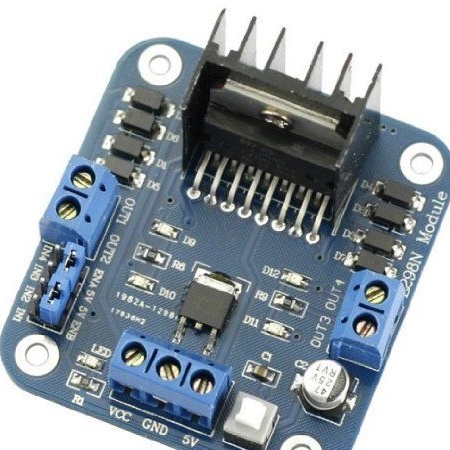
Arduino uno, HC-06 Bluetooth-modul, två växlar med 300 rpm 12v växlar, H-bridge L298N Dual H Bridge motorstyrenhet
12 till 1.3 Ett blybatteri. Varje motor förbrukar 0.4A, plus förbrukningen av förarlogik. Arduino-kablar, vanliga 9v-batterier och ett kontaktdon för att ansluta batteriet till Arduino. Elektriska ledningar för anslutning av elmotordrivrutiner. USB-kabel. Telefon med Android version 4 och högre. 4 svängbara 50 mm gummihjul från Screwfix eller Toolstation; Två Lynxmotion HUB-02 universella nav.










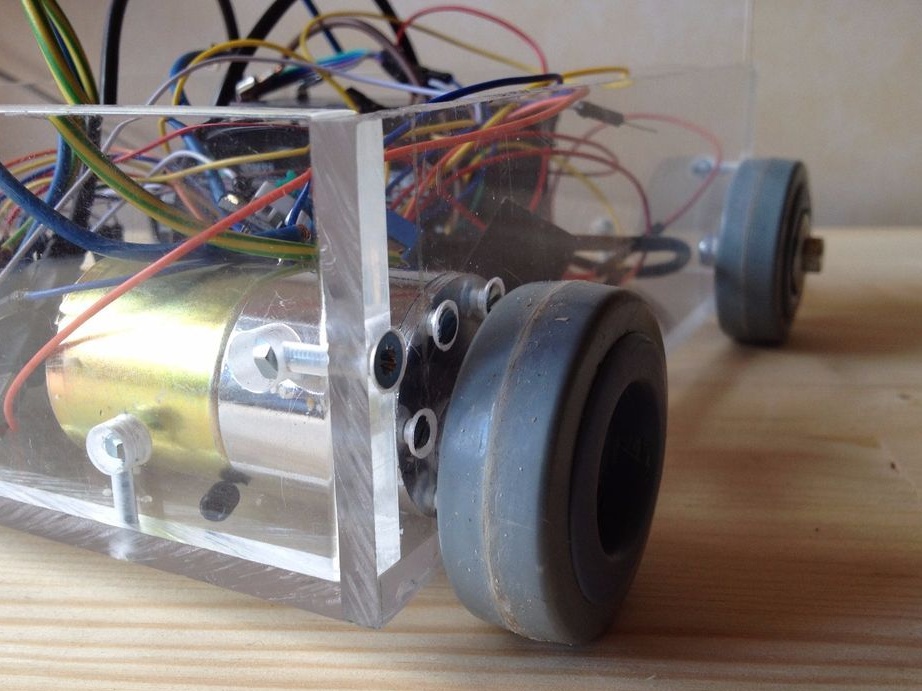
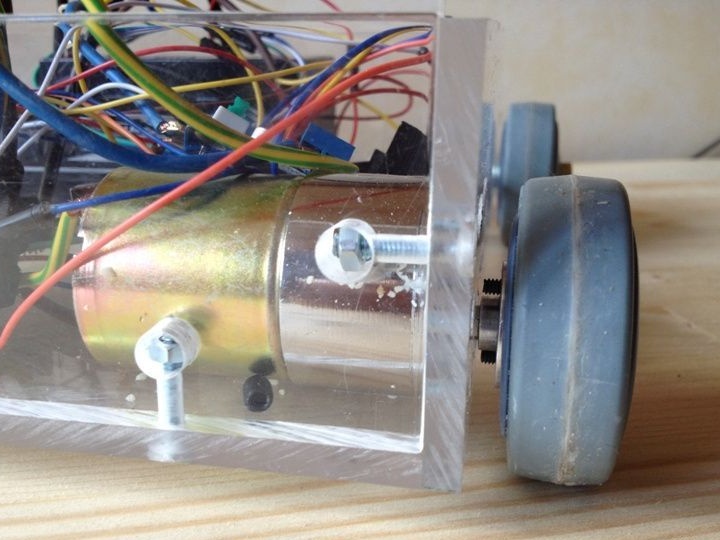
Väskan är monterad av plast 22 cm lång och 17 cm bred. Två motorer måste anslutas till axeln och säkras med en gängad stift.
Framhjul
Gummit tas bort från rullarna och två hål borras i dem i enlighet med hålen på naven. Naven är fixerade på axlarna som passerar genom huset med gängade stift. Därefter fixeras rullarna på naven och gummi sätts på dem.
Bakhjul
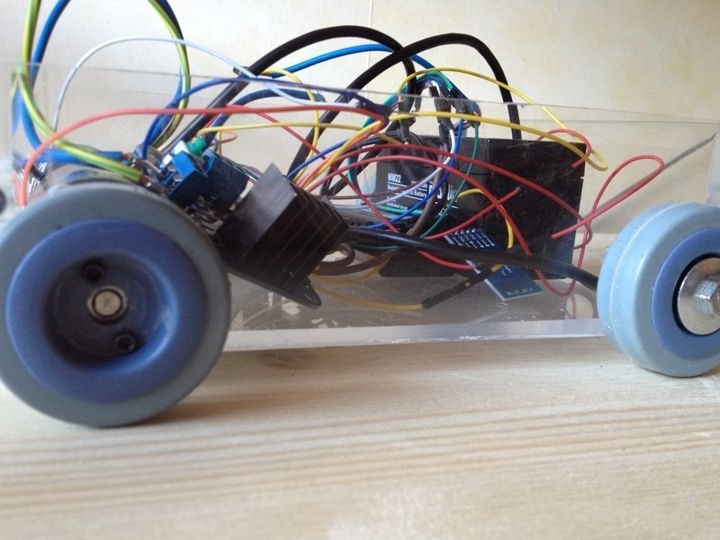
Bakhjulen lossnar helt enkelt från gångjärnet och säkras genom hål som borras i huset.
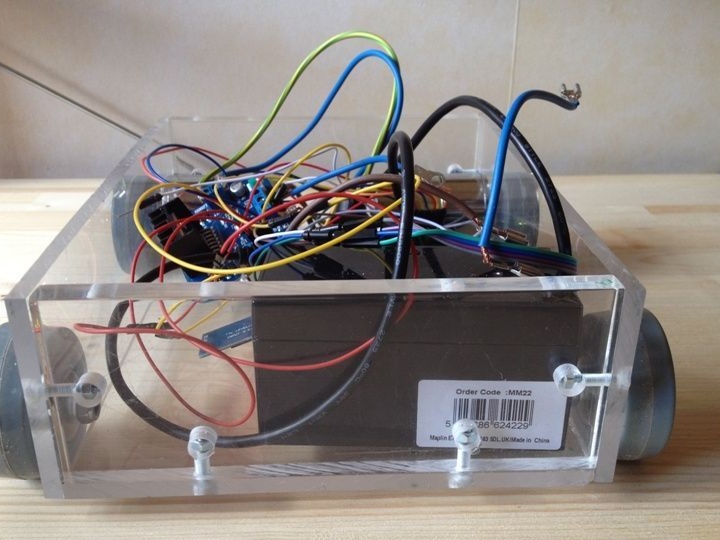
Elektriska anslutningar.
Det kommer att vara problem med att ladda programkoden i Arduino. Detta beror på att Bluetooth-modulen, dess RX \ TX-kontakter, är anslutna till Arduino-stiften 1 och 2, som också används för att överföra data via USB. Det är nödvändigt att ändra kontakterna 1 och 2 till 11 och 12 i det anslutna biblioteket, som kommer att användas för dataöverföring.
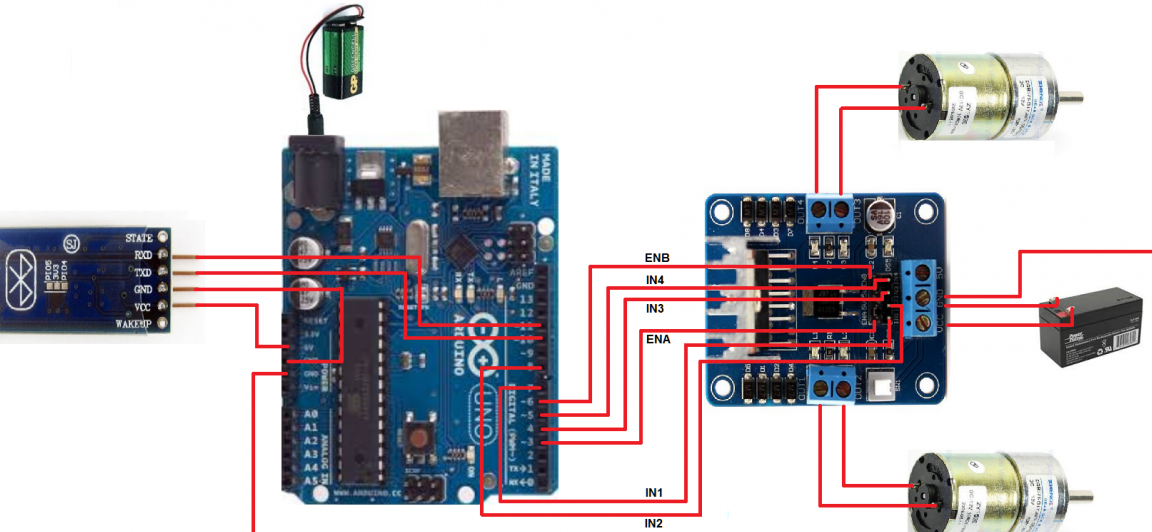
Motorföraren behöver inte en separat strömförsörjning för logiken. 12V räcker för att driva förarlogiken och själva motorn. Batteriets minus bör anslutas till både Arduino och motordrivaren. ECA / 5V och ENB / 5V motorförarens kontakter kan bytas. Det måste tas bort innan du ansluter till Arduino. Ingenting ska anslutas till de två 5V-stiften.
Android-kod.
Den bifogade filen måste packas upp och importeras till Android Studio, packa den i apk och installera på telefonen.
Nyckelfiler:
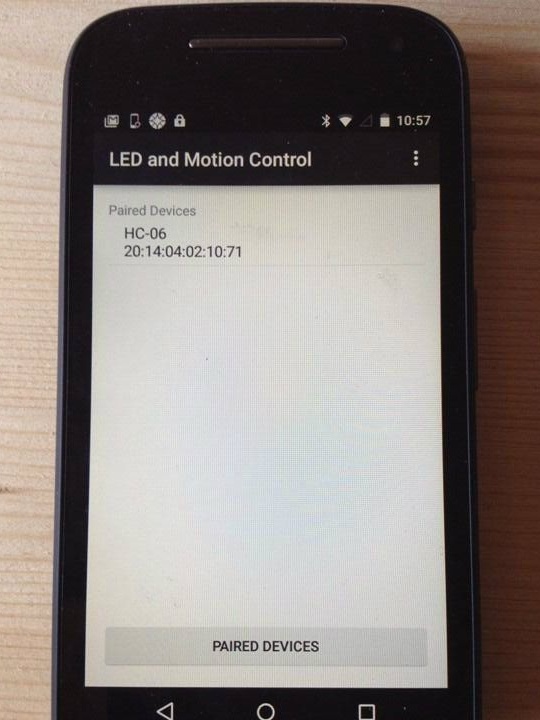
Kopplade enheter Aktivitet:
deviceList.java
activity_device_list.xml
Aktivitet för LED och rörelsekontroll:
ledControl.java
activity_led_control.xml
manifest:
AndroidManifest.xml
Parade enheter Aktivitet visar tillgängliga Bluetooth-enheter. Så snart enheterna är anslutna överförs kontrollen till lysdioden och rörelsekontrollaktiviteten.
På / av-knapparna skickar ett “på” eller “av” -meddelande till Arduino och slår på eller stänger av den inbyggda lysdioden. Telefonens accelerometer, som överför x / y-värden från sensorn, varje gång dessa värden ändras, styr rörelsen. Baserat på detta beräknar Arduino hastigheterna och rotationsriktningen för motorerna i området från 0 till 255. Det överför dessa Arduino-värden i form av 'L-255:' eller 'R100', etc. Baserat på detta skickar Arduino rotationshastighetskommandona för den vänstra motorn till ENA, den rätta till ENB och ändrar rotationsriktningen genom att ändra polariteten till IN1, IN2 för vänster, N3 och N4 för den högra motorn.