


God eftermiddag, idag vill jag dela instruktioner om att göra en tank. Det finns två alternativ för den interna styrenheten: ESP -8266 och Arduino Pro Mini. I den första versionen utförs kontrollen via Wi-Fi-kommunikation. I den andra - IR-fjärrkontrollen. Den är tillverkad på grundval av TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), den drivs av en Tamiya 70097 Twin-Motor Gearbox Kit och de motorer som medföljde växellådan.
Vi kommer att behöva:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- modelllim (TAMIYA Cement till exempel)
- Tamiya 70097 tvillingmotorväxellåda
- ESP 8266 -12E eller Arduino Pro Mini 8MHz 3.3V
- spänningsstabilisator AMS 1117 3.3v 8000mA (om tillval med ESP 8266-12E)
- Qifei L9110-drivrutin
- kondensator 10v 1000uF
- LED i två färger (röd, grön)
- blå LED
- 2 röda lysdioder
- IR-mottagare
- fotoresistor
- 2 fack för 2 AAA-batterier eller 4 AAA 1,2V 1000mA NI-MN-batterier
- 2 motstånd 2ohm
- 4 motstånd 75 ohm
- 6 motstånd 10 kOhm (om tillval med ESP 8266-12E)
- knapp
- fotoresistor
- USB - TTL
- lödkolv
- flerfärgade ledningar
Steg 1 Hus och mekanik.
Först måste du samla modellen TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Vi limmar nedre delen enligt anvisningarna, med undantag för de delar som täcker utloppsöppningarna för växellådans axlar. Ledande stjärnor klistrar sig inte heller. Limma den övre delen enligt anvisningarna utan ändringar. Efter att ha limt allt detta, låt torka och fortsätt till insamlingen av växellådan. Som framgår av instruktionerna kan Tamiya 70097 monteras i två olika versioner.
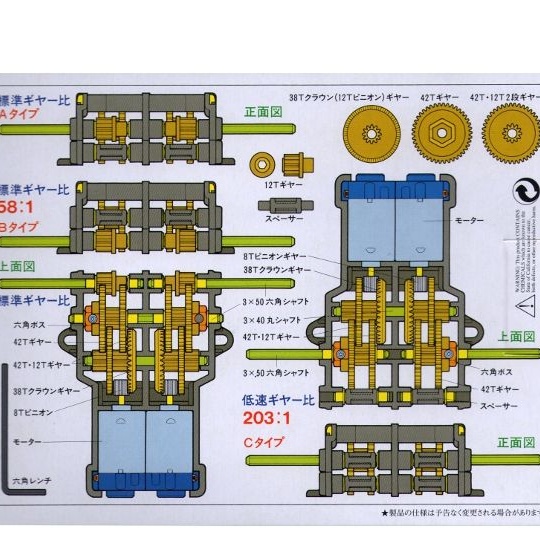
Det första alternativet med ett växelförhållande 58: 1, det andra - 203: 1. Vi behöver det första alternativet. Och här är inte så enkelt. I detta fall kan axelutgången vara närmare botten av växellådan eller i mitten. Axlar måste andas ut i mellanhålet! Efter att ha monterat växellådan fortsätter vi att installera den på modellen. I teorin borde allt vara enkelt, för både företagets och växellådans modell och växellåda. I praktiken måste växellådan skjutas dit. I växellådans horisontella läge bulade drivhjulens axlar uppåt, så vi var tvungna att klippa en metallplatta, vilket gjorde det möjligt att fixera växellådan i önskat läge.

Växellådans axlar måste skäras med 3 mm. Limma sedan drivhjulen på dem.

I den övre delen närmare baksidan gör vi hål för en tvåfärgad LED och en IR-mottagare.

Närmare fram är ett hål för en blå LED som fungerar som en ficklampa.

Och inuti luckan - för en fotoresistor.

Limma de röda lysdioderna för bakgrundsbelysning på baksidan.

Till alla ovanstående måste du löd trådarna. Det är bekvämare att göra detta innan installationen.
Steg 2 Elektriker
Här kommer jag att tillhandahålla ett val av alternativ för vidare montering.
Om du har valt ESP 8266. Den inbyggda Wi-Fi-modulen underlättar kontrollen och anslutningen mycket.Det kan enkelt programmeras i Arduino IDE. Det är bäst att välja en modul med 4 Mb minne. I detta fall är det nödvändigt att samla in minsta sele för att starta och blixtar ESP-8266. Endast VCC-stiftet är anslutet direkt till strömförsörjningen, de återstående stiften: CH_PD, RESET, GPIO0, GPIO2, måste dras till strömförsörjningen (VCC) via ett motstånd. 10kOm-motstånd kan ersättas med andra, från 4,7 kOm till 50 kOm, med undantag för GPIO15 - dess värde måste vara upp till 10 kO. Direkt, till minus (GND) för strömförsörjningen, ansluter vi bara GND, och vi drar också GPIOO genom motståndet till 10kOm, för att sätta modulen i firmwarnedladdningsläget, till GND. Knappen behövs för att starta om och blinka modulen. USB-TTL-kontakt - för firmware.
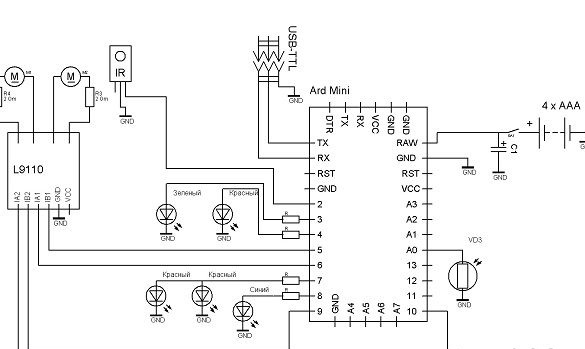
Här är ett diagram
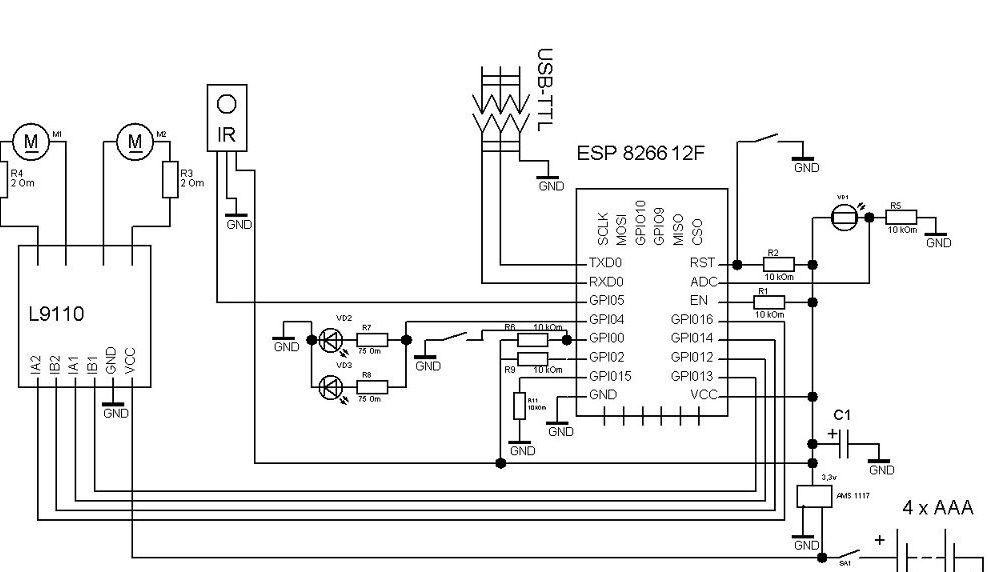
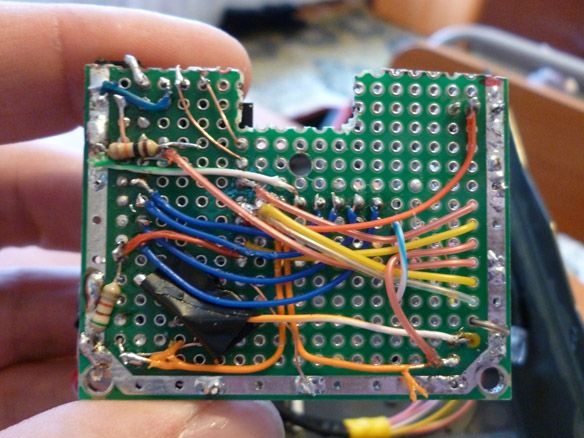
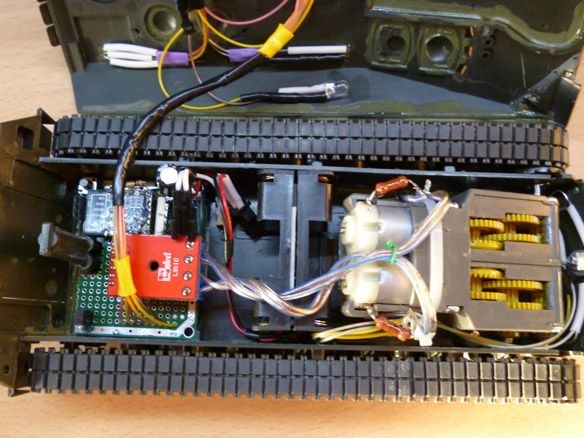
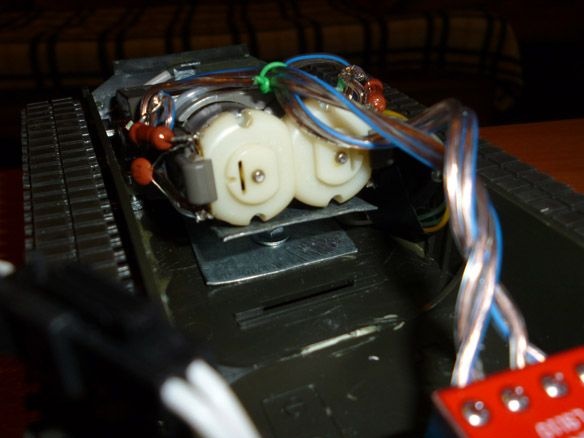
Jag förklarar lite, de blå och två röda lysdioderna behövs för bakgrundsbelysning (det är synligt och vackert i mörkret), fotoresistor är ansluten till ADC på regulatorn och behövs för att bestämma belysningen (när bakgrundsbelysningen blir mörk). 10 kOhm dragmotstånd, 75 Ohm för lysdioder, 2 Ohm strömbegränsande för motorer (utan dem, när man försöker flytta, överbelastade regulatorn). Vi lödar allt enligt kretsen på kretskortet. För strömförsörjning kan du använda 4 "små" batterier eller fyra AAA-batterier, lödda i serie. Vi limmar två fack av två batterier med dubbelsidig tejp och ansluter i serie. Både batterifack och ackumulatorer placeras mellan växellådan och kretskortet.

Om ditt val föll på Arduino. Endast Arduino Pro MINI passar inuti. Det är värt att välja ett 3,3 volt kort, eftersom motorerna är konstruerade för 3 volt och du inte vill driva motorerna och Arduino separat. Arduino är lättare. Hela styrsele och spänningsregulator finns redan på själva kortet. Det återstår att lossa Arduino-uttaget och motordrivaren på kretskortet.

Steg 3 Förbereda programmeringsmiljön.
För att redigera firmware och fylla skissen i ESP måste du installera Arduino IDE från den officiella webbplatsen för Arduino.cc, samt installera tillägget för ESP, via Boards Manager. För att göra detta, starta Arduino IDE och sedan Arkiv - Inställningar - i fältet Extra Boards Manager URLs, sätt in länken
http://arduino.esp8266.com/package_esp8266com_index.jsonklicka på OK (du kan ange flera länkar separerade med komma i det här fältet). Nästa verktyg - Board - Boards Manager, ange esp8266 i filterfältet och klicka på ESP8266 av ESP8266 Community Forum. Klicka på Installera och vänta tills nedladdningen är klar. Nu återstår det att välja Board - Generic ESP8266 i Verktyg-menyn och ställa in frekvensen för din modul till 80 eller 160 MHz, flashminnets storlek och välja den seriella porten till vilken USB-TTL-adaptern är ansluten.
För Arduino installerar du bara Arduino IDE från den officiella webbplatsen Arduino.cc.
Steg 4 Firmware
Det återstår att redigera skissen och fylla den med ESP.
I fältet "String _ssid =" ";" mellan citat anger vilken åtkomstpunkt du vill ansluta till.
"String _password =" ";" är lösenordet för det här nätverket.
"String _ssidAP =" Mardella ";" namnet på nätverket som ESP kommer att höja om det inte ansluter till det befintliga.
"String _passwordAP =" 12345678 ";" - lösenordet för nätverket som ESP kommer att ta upp om det inte ansluter till det befintliga.
"String SSDP_Name =" Mardella ";" SSDP-namn
Efter att ha börjat försöker ESP ansluta till åtkomstpunkten som anges i skissen, om du lyckas måste du bestämma vår robots IP-adress och ansluta till den här adressen via en webbläsare. Du kan också gå igenom en dator till nätverksinfrastrukturen, hitta vår tank där och dubbelklicka för att ansluta till den. Om anslutningen misslyckas blir ESP åtkomstpunkten. Då kan åtkomst erhållas genom att ansluta till en ny åtkomstpunkt och ange 192.168.1.1 i webbläsaren.
Webgränssnittet består av två sidor. Den första att kontrollera. Den andra är för anpassning. På den andra sidan kan du ange vilken åtkomstpunkt du vill ansluta till, samt namnet på tanken och namnet och lösenordet för den åtkomstpunkt som ESP höjer. Alla ändringar träder i kraft efter en omstart. Du kan också starta om modulen via webbgränssnittet.
För Arduino måste du redigera alla "result.value" -fält. Efter att ha skrivit ner IR-koderna på konsolen som du kommer att använda där.

Videotanchika: