
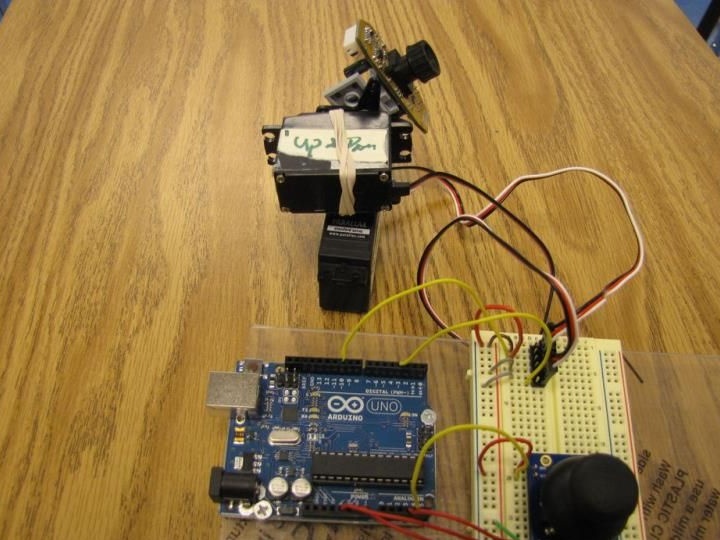
Material och verktyg:
- mikrokontroller Arduino (i detta hemgjorda produkt tillämpar Arduino Uno Rev 3);
- Två servor från Parallax;
- joystick (även från Parallax);
- kretskort) liten);
- anslutningar för anslutning;
- En enhet för att spåra rörelse hos servomotorer (en trasig webbkamera och legokuber används).
Hemlagad monteringsprocess:
Första steget. Vi ansluter servomotorer
Den hemlagade monteringsprocessen börjar med att ansluta servomotorerna. För att montera en preliminär layout används ett kretskort. Då blir det möjligt att skapa en separat sköld. I figuren kan du se hur exakt allt är anslutet.
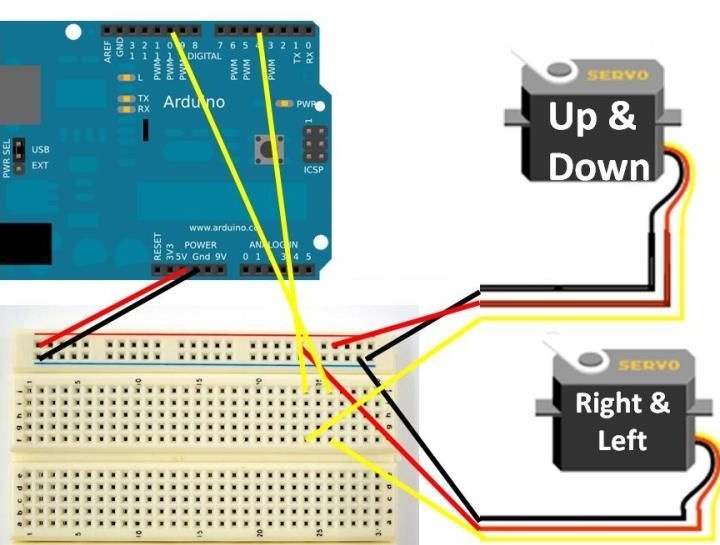
Den röda kabeln är strömmen, den ansluts till 5V-stiftet på Arduino-kontrollen.
Den svarta ledningen är en minus (jord), den ansluts till Arduino-utgången som kallas GND.
Den gula kabeln från höger och vänster servomotor måste vara ansluten till stift 11. På vissa modeller kan den vara vit.
En liknande gul Up & Down-kabel måste anslutas till stift 4. Den kan också vara vit på vissa motormodeller.
Det är viktigt att komma ihåg att de signalkontakter som används för att styra motorn kommer från PWM-utgångarna.
Steg två Anslut joysticken
Hur joysticken är ansluten kan ses på bilden. Till att börja med kan schemat verka ganska komplicerat, men det är faktiskt inget komplicerat här. Liksom med motorer används ett kabeltavla här.
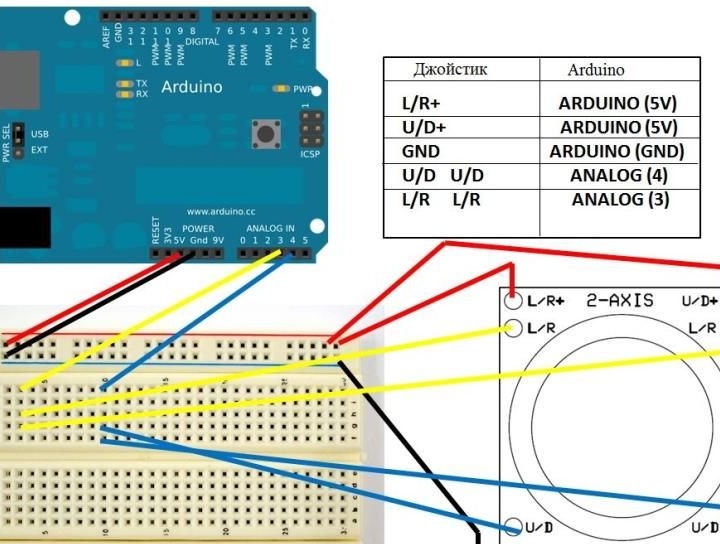
1. På joystickmodulen hittar du utgångarna U / R + och L / R +. Genom dessa utgångar är strömmen ansluten. Därför måste du applicera + 5V spänning från motsvarande stift till Arduino.
2. Det finns också två kontakter under joysticken som heter L / R och två U / D-kontakter. De måste anslutas till de analoga utgångarna A3 och A4.
3. Tja, avslutningsvis måste jorden på joysticken vara ansluten till jorden på Arduino.
Efter montering måste anslutningen dubbelkontrolleras. Det är på grund av anslutningsfel som i de flesta fall uppstår problem. Detta gäller särskilt när ett kretskort används och det finns många anslutningar på det.
Steg treSkiss för Arduino
Koden är mycket enkel och innehåller detaljerade kommentarer. Ovanstående kod behöver bara kopieras till Arduino IDE. När koden laddats bör motorerna inte röra sig. De bör bara börja röra sig när knappen på joysticken trycks in.
Problem som kan uppstå och hur man löser dem
1. Om motorerna inte slås på, dubbelkontrollera anslutningen. PWM-utgångar används för att ansluta motorer, och analoga utgångar används för att ansluta joysticks.
2. Det händer att omedelbart efter laddning av koden börjar motorerna att vibrera. Detta händer om du felaktigt ansluter stiften U / D + L / R +. Anslutningen måste kontrolleras noggrant. För att inte bränna kortet under testet måste det kopplas bort från datorn.
3. Om allt är kontrollerat men motorerna fortfarande inte vill fungera kan du försöka ansluta joysticken igen. Det måste tas bort från kretskortet och sedan installeras tillbaka med lite ansträngning. Joystick-kontakter bör gå in i layouten.
Om allt visade sig, kan du nu börja skapa hemlagade objekt med kontroll via joysticken. Till exempel kan du skapa en robot som kan styras med en joystick och mycket mer.