Nästa fredag kväll ville författaren samla in något intressant. Han kom ihåg att han såg projekten med att rita robotar och att ha en kontinuerlig rotationsservo, och det beslutades att montera en sådan robot. En kontinuerlig rotationsservo kan tillverkas av vanligt.
material:
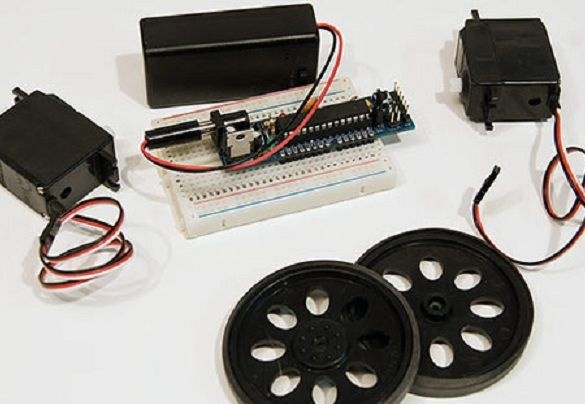
- DC Boarduino (det här är en klon Arduino)
- Servo för kontinuerlig rotation av 2 delar
- Servohjul 2 st
- brödskiva
- 9V batterikontakt med 2,1 mm kontakt och omkopplare
- anslutande ledningar
Det är inte nödvändigt att använda Boarduino i detta projekt, något Arduino-kort är tillräckligt. Författaren valde detta bräde på grund av dess storlek. Du behöver också ett visst antal markörer, du kan köpa en uppsättning olika färger för denna robot.
Dessutom behöver du ett 9V-batteri och basen för teckningsrobotens kropp.
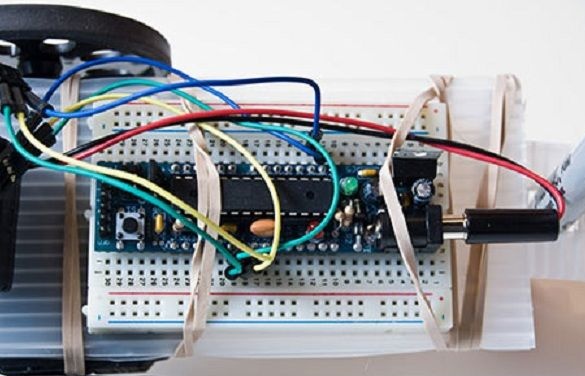
Det är inget komplicerat i montering av roboten. Först och främst fäster författaren hjulen med två servor med tejp och mätte avståndet mellan hjulen. Det är nödvändigt att basens bredd är något mindre än avståndet mellan hjulen. Författaren använder korrugerad plast, eftersom den är ganska lätt och hållbar, och det är inte svårt att arbeta med det. Dess användning är naturligtvis inte nödvändig, du kan till och med använda kartong eller plast från fodral för diskar.
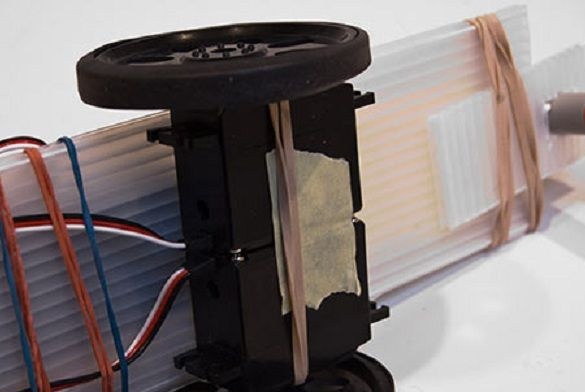
Servo-enheter anslöts till basen med gummiband. Vid placering av batteri och brödskiva uppstod svårigheter eftersom det var nödvändigt att upprätthålla en balans. Författaren ville göra mer utrymme på den sida som markören placerades med, men ville inte göra en fördel på motsatt sida. Med hjälp av gummiband är det ganska enkelt att justera platsen för komponenterna och bestämma den optimala.
Under hela projektet används ledningar med BLS-stift för att ansluta till brädskivan, servo-enheter är också anslutna till dem.
När författaren avslutade allt arbete med att montera roboten ville han omedelbart kontrollera dess prestanda. Det tog lite tid att söka efter koden. Efter att ha snubblat över en artikel om att kontrollera Parallax kontinuerlig rotationsservo med Arduino, insåg han att han var på rätt väg. Koden förenklades så mycket som möjligt, just nu kan Drawbot bara gå i cirklar.Naturligtvis är detta primitivt, men det är också en bra start och grunden för utveckling och modernisering. Koden kan laddas ner under artikeln.
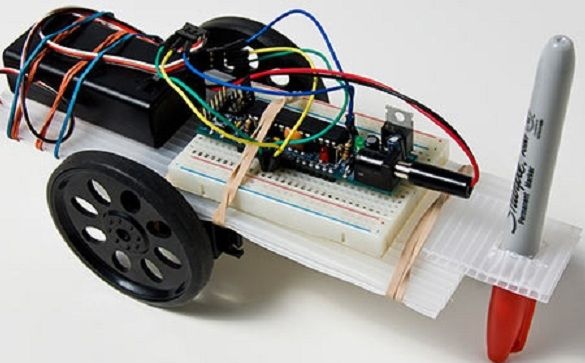
Nu har författaren fått en robot som reser i en cirkel. Fortsätter arbetet, tog författaren resterna av wellpapp och gjorde ett hål i det med hjälp av en kniv. Hålet skars med en diameter som var något mindre än krävt, tack vare det reducerade hålet var markören i det perfekt fäst. Om du använder kartong blir denna effekt inte och markören håller sig inte bra eller faller ut.

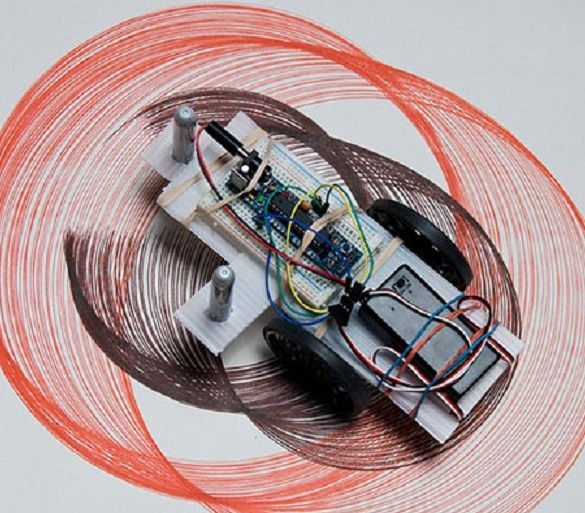
Efter att ha installerat markören är det dags att testa roboten. Genom att sätta den på mitten av 24x18-arket och sätta på det såg författaren slutligen Drawbot i aktion. Han började snurra rita cirklar. Vi kan säga att författaren lyckades skapa en robot som skapar ett slags konstverk.
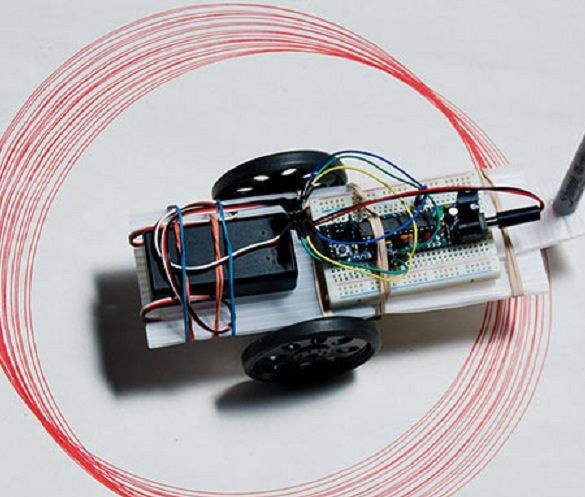
Bilden kom ut lite besvärlig på grund av att lakan låg på golvet, och det var inte riktigt jämnt, och troligen roterade servos inte synkront. Det visade sig att en cirkel kunde vara lägre, den andra högre och den nästa fortfarande lite högre eller lägre. Förmodligen på en idealisk plats skulle alla cirklar anpassas i en rad. Det ser snyggare ut.
Författaren trodde att den andra markören kunde lysa upp situationen, och roboten kommer att göra mer intressanta bilder. Resultatet var bra, cirklar började korsa varandra. Det blir mer intressant att se hur Drawbot beter sig på ett stort pappersark.
Genom att släppa roboten på en pappersyta kan författaren få en cirkel eller ett gäng cirklar. Men med en färdigt robot kan du redan tänka på att förbättra den genom att ändra koden.