

Den här artikeln diskuterar tillverkningen av proportionell kartbaserad radiostyrningsutrustning Arduino. Ett intressant inslag i projektet är att utrustningen utformades som ett alternativ till den "vuxna" utrustningen, men som du själv kan göra. Det finns trimknappar på sändaren, vilket är viktigt för till exempel kontroll modeller flygplan, är sändaren också utrustad med en liten display med organiska lysdioder som visar grundläggande information om sändarens drift. Utrustningen är konstruerad för 6 kanaler, 4 proportionella och 2 diskreta. Författaren lovade också att framtida tillägg av två mer proportionella kanaler, två potentiometrar lades till fallet, men för tillfället är de inte involverade. Ändå är detta tillräckligt för att kontrollera modellen för ett flygplan, fartyg eller bil, och diskreta kanaler gör att du kan kontrollera den extra belastningen, till exempel införande av strålkastare, däckljus, navigationsljus eller till och med lansering av små missiler. Utrustningen har två styrlägen - linjär och exponentiell.
För sändaren behöver du:
1 x Arduino NANO / UNO / ProMini
1 x BMS-skyddskort för tre Li-ion-burkar
1 x 5,5 x 2,1 mm kontakt
1 x Step Up DC / DC Converter XL6009
1 x LM2596 liten nedriktningsomvandlare (jag kommer att prata om det separat)
3 x 18650:
2 x joysticks JH-D202X (säljs på Ali)
2 x vippbrytare
1 x i2c OLED-skärm 0,96 tum 128X64
1 x NRF24l01 radiomodul med förstärkare och antenn
9 x taktknapp 6 * 6 * 5 mm
Utgångsmotstånd (se diagram)
För mottagaren behöver du:
1 x Arduino NANO / UNO / Pro Mini
1 x Radiomodul NRF24l01
1 x AMS1117 3,3V spänningsregulator
30 x pls kammar
1 x brödskiva
1 x 10 uF kondensator
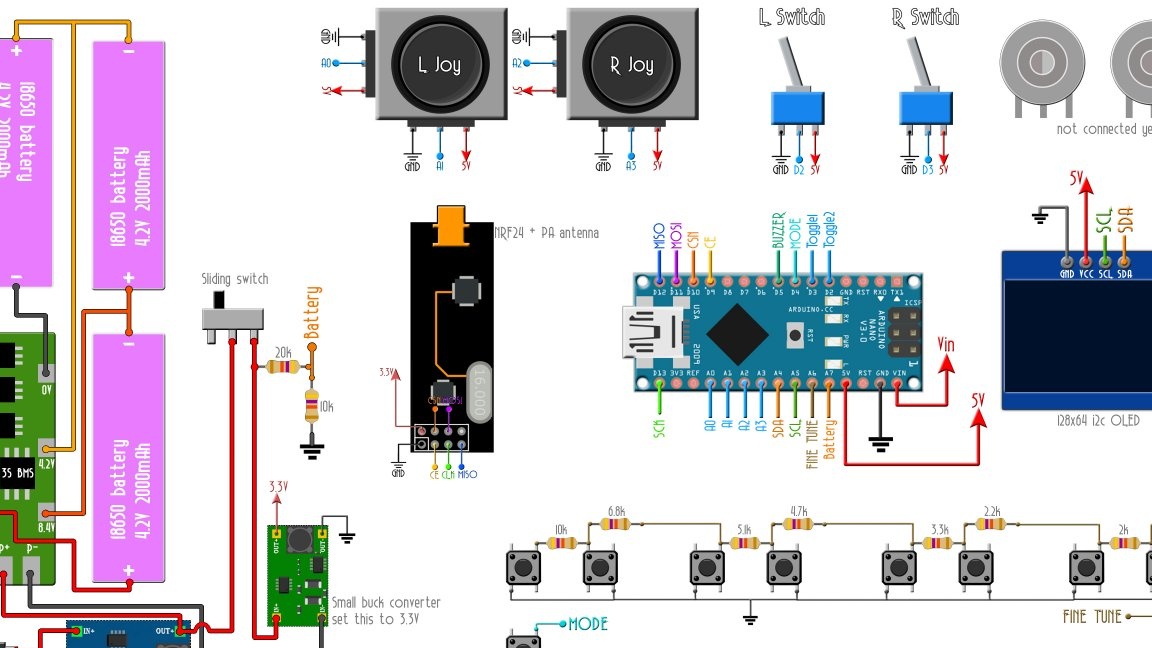
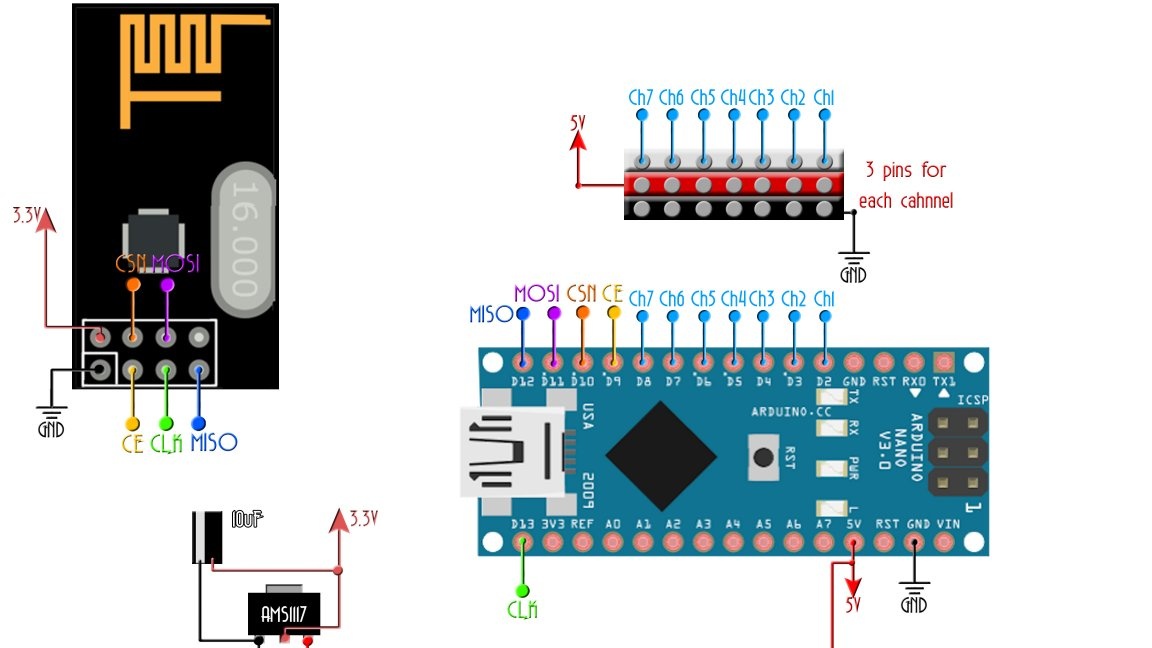
Nedan kan du se en grafisk bild av alla komponenter och ett diagram över deras anslutning. Innan montering måste buck-omvandlare konfigureras, XL6009 till 12,6 V (denna modul ansvarar för laddning), LM2596 till 3,3 V (ström till radiomodulen). Istället för LM2596 är det teoretiskt möjligt att använda ASM117, enligt databladet är den maximala ingångsspänningen för denna stabilisator 15 V, men det rekommenderas att inte använda den högre än 12 V. Uppenbarligen, baserat på dessa överväganden, använde författaren en annan DC / DC-omvandlare. Istället kan du också använda en justerbar stabilisator, till exempel LM317.
hölje
Väskan består av två huvuddelar: den övre och den nedre. Dessutom skrivs ut 9 knappar (8 för trimning och ett läge-knapp), 5 säkerhetskopior för knappar, en bildskärmsram och en strömreglage.Författaren tryckte en PLA med ett radergummi med 20% täckning, ett 0,4 mm munstycke och en lagerhöjd på 0,3 mm. Förresten, ingen förbjuder användning av ett annat fall, du kan bara ta en lämplig låda, lima den själv eller ta ett ganska stort fall från en kinesisk leksak, de säljs nästan i påsar på klassificerade webbplatser.
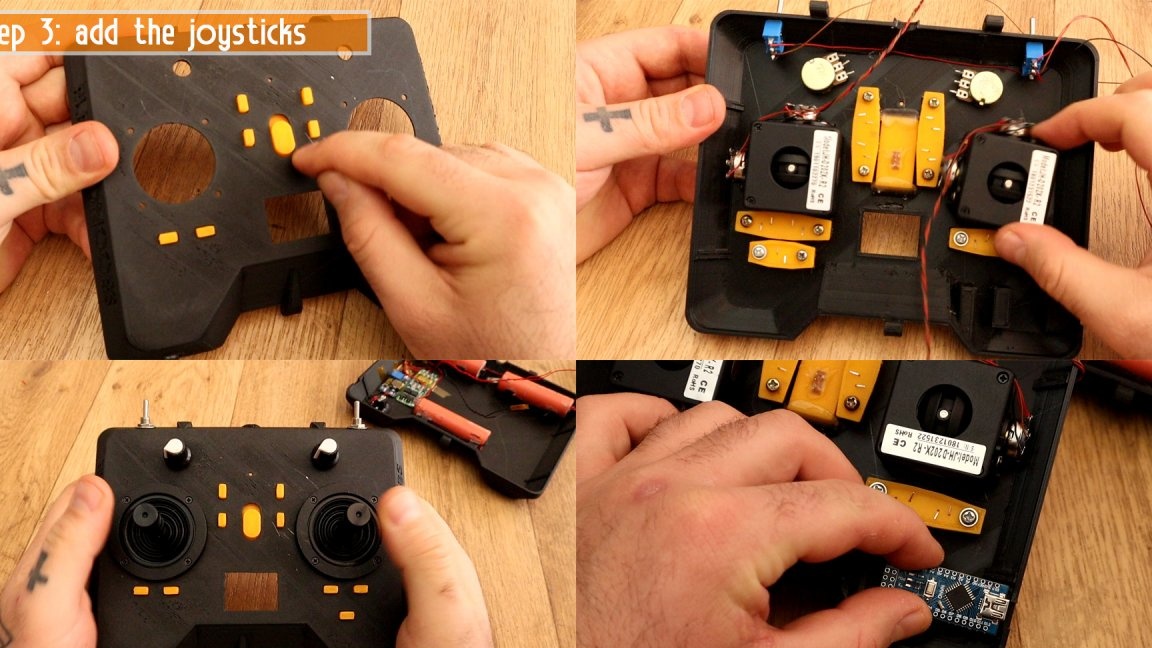
Sändarmontering
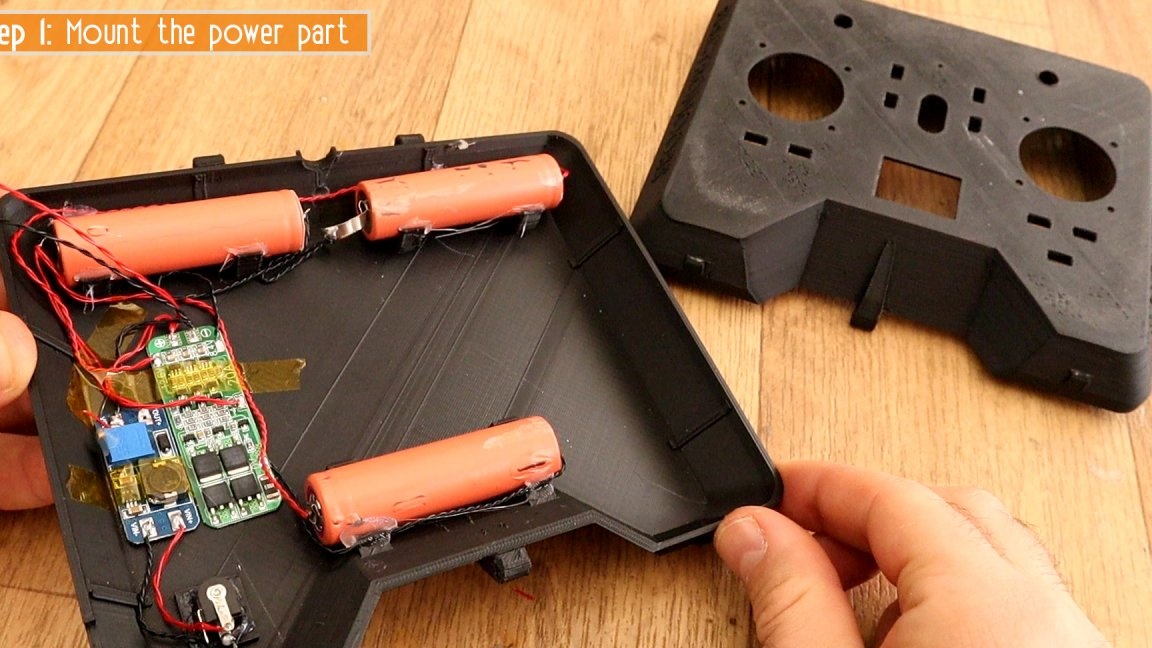
Batterier är anslutna i serie. Författaren gjorde detta med lödning, jag vill notera att lödburkar från 18650 kräver viss skicklighet, så om du inte har någon sådan erfarenhet, köp batterier med redan svetsade kronblad och löd dem. Batterierna enligt ovanstående schema är också lödda till BMS-modulen, vars ingång matas med spänning från XL6009-omvandlaren (MT3608 kan användas istället). BMS ansvarar för jämnt laddning / urladdning av alla burkar och stäng av strömmen när batterierna är slut. Spänningen kan också övervakas med skärmen. Batterierna laddas av en 9 V strömförsörjning med en ström på högst 3 A (max för XL6009). I själva verket måste laddningsströmmen beräknas beroende på batteriets kapacitet och ta strömförsörjningen med något lägre ström eller begränsa den. Det är bekvämt att montera modulerna i höljet med hjälp av "bil" dubbelsidig tejp.
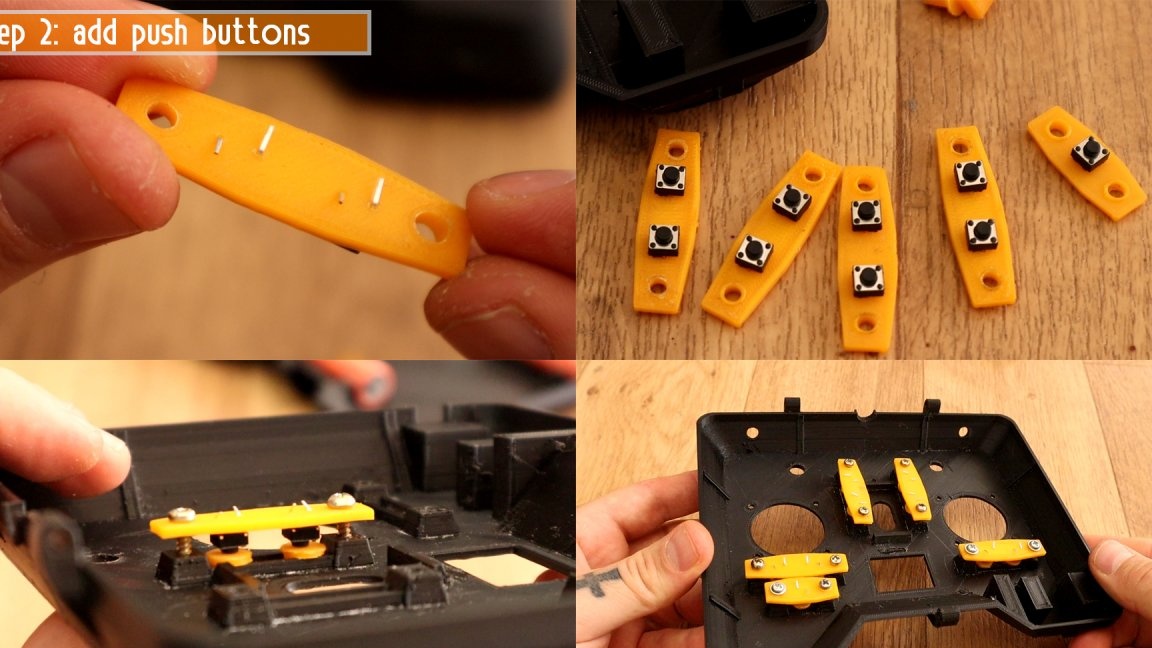
Klockknapparna installeras på speciella plattformar, varefter de fästs med små skruvar på motsvarande stöd inuti höljet. Här är faktiskt allt på designernivå och förstås väl från fotot.
Knapparna är sammankopplade av motstånd, vilket i princip lämnar ett litet resistivt tangentbord, vilket gör att du bara kan använda en stift på Arduino-kortet. Ledningarna är lödda till styrspakpotentiometrarna, de extrema ledningarna går till marken och 5 V, medeltalet leder till motsvarande Arduino-stift. Jag har planer på att upprepa detta schema, jag har redan experimenterat lite och jag kan säga att koden har funktionen att automatiskt invertera kanaler efter behov, men jag har ännu inte förstått hur schemat bestämmer detta behov. Detta för att säga att kanalinversionen huvudsakligen genomförs genom att lödas de extrema slutsatserna på platser. Sådana joysticks säljs i skrivande stund i Ali till ett pris av ungefär $ 7 styck, oavsett om det är upp till dig eller inte. Istället kan du använda joystickmodulerna för arduino eller joysticks från spelkontroller.
Faktum är att joysticken fungerar som en avdelare, avledar handtaget, vi ändrar spänningen vid mittenutgången på potentiometern, och beroende på denna spänning bestämmer arduino avvikelsen.
[center] [/ center]
Tumlar är också anslutna. Växelomkopplare behövs på-av, eftersom kanalen är diskret och endast har två värden - 0 eller 1, beroende på om utgången från arduino dras till marken eller till en 5V strömförsörjning. Dessutom är on-off-omkopplaren nödvändig, om du lämnar utgången "hängande i luften", vad som skulle hända när man använder tre positioner, styrenheten förstår inte vad som händer och värdet hoppar slumpmässigt antingen 0 eller 1 (enligt min erfarenhet). Du kan inte ställa in ytterligare potentiometrar för närvarande de inte är involverade. Eller så kan du sätta och övervaka källsidan, kanske kommer författaren så småningom att publicera den uppdaterade firmware.
Faktum är att joysticken fungerar som en avdelare, avledar handtaget, vi ändrar spänningen vid mittenutgången på potentiometern, och beroende på denna spänning bestämmer arduino avvikelsen.
[center] [/ center]
Tumlar är också anslutna. Växelomkopplare behövs på-av, eftersom kanalen är diskret och endast har två värden - 0 eller 1, beroende på om utgången från arduino dras till marken eller till en 5V strömförsörjning. Dessutom är on-off-omkopplaren nödvändig, om du lämnar utgången "hängande i luften", vad som skulle hända när man använder tre positioner, styrenheten förstår inte vad som händer och värdet hoppar slumpmässigt antingen 0 eller 1 (enligt min erfarenhet). Du kan inte ställa in ytterligare potentiometrar för närvarande de inte är involverade. Eller så kan du sätta och övervaka källsidan, kanske kommer författaren så småningom att publicera den uppdaterade firmware.
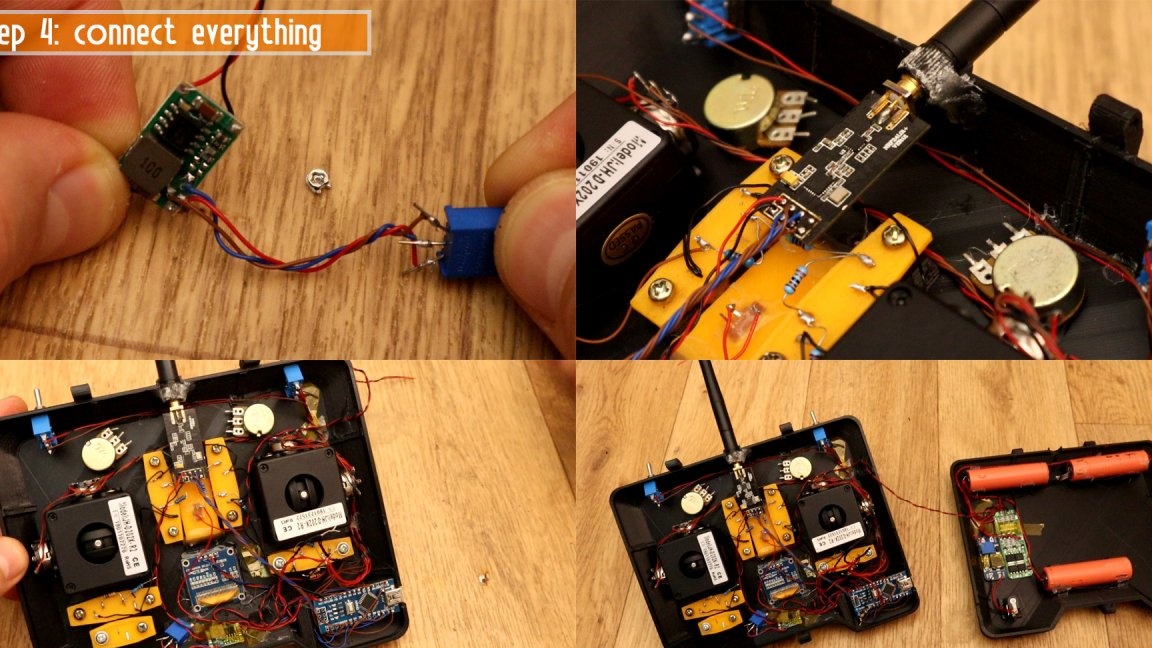
Därefter installeras en arduino, en radiomodul och ett modul för radiomodul. Som beskrivits ovan är det nödvändigt att ställa in en spänning på 3,3 volt på den. Det är nästan omöjligt att göra detta med ett standardvariabelt motstånd, så författaren lossade det och lödde en flersvänd trimmer istället. Därefter är displayen monterad och alla komponenter anslutna till arduino-terminalerna enligt diagrammet.
införing
Arduino-firmware har redan pratats om 1000 gånger, vid denna tidpunkt är förmågan att göra detta medan du håller fast vid ett arduino-projekt lika viktigt som standard som förmågan att hålla ett lödkolv i händerna medan du håller något att lödda.Koden för sändaren, mottagaren, nödvändiga bibliotek och en fil för 3D-utskrift av ärendet kan laddas ner i ett arkiv i slutet av artikeln.
mottagare
För mottagaren behöver du ett annat Arduino-kort, en radiomodul (utan antenn, telemetri är fortfarande inte implementerad här) och en 3,3 volt stabilisator. Mottagaren är lödd till brödskivan. Mottagarens effekt utförs på samma sätt som kraften från någon annan fabriksmottagare, från en speciell utgång från hastighetsregleringen.

På egen hand vill jag lägga till att istället för standardantennen för den här modulen är det önskvärt att löda samma antenn som är installerad i modulen med en förstärkare (endast utan hölje). Detta kommer inte särskilt att påverka mottagningsområdet, men kommer att påverka mottagningskvaliteten avsevärt beroende på den kontrollerade modellens position i olika plan. För moderna mottagare och sändare är även två antenner installerade för detta ändamål, som är placerade vinkelrätt mot varandra.
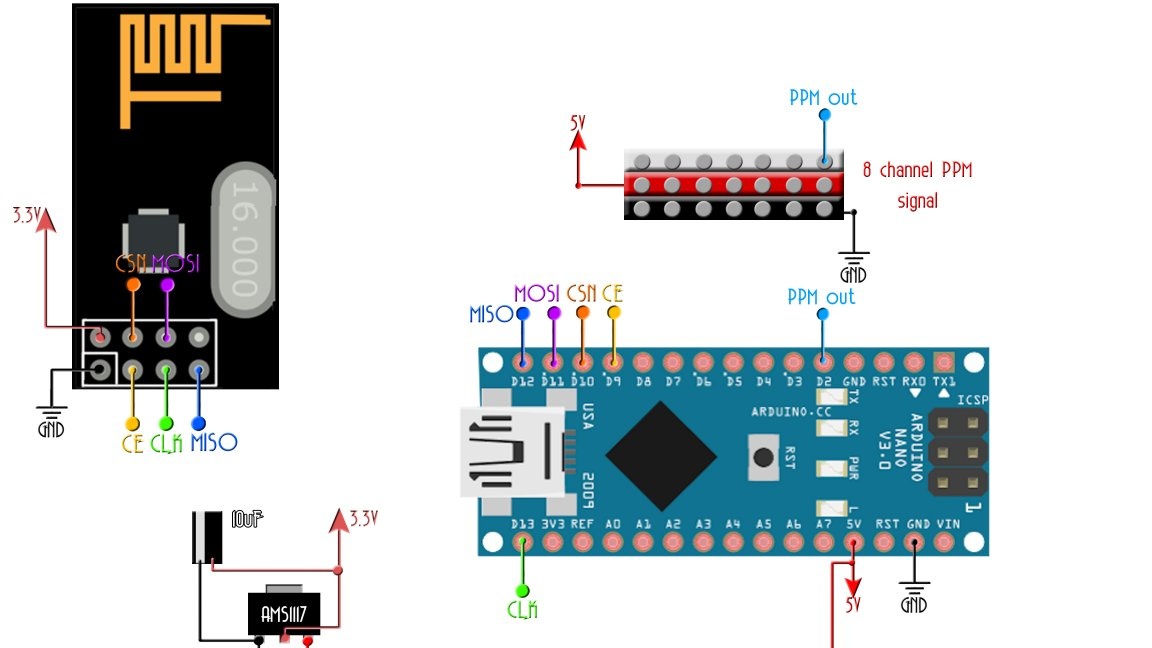
Dessutom har författaren implementerat en mycket viktig funktion - utgång från PPM-mottagarsignalen. Schematiskt förändras ingenting i detta fall, du behöver bara fylla i en annan firmware, PPM-signalen matas ut på samma sätt som i de flesta fabriksmottagare - från den första kanalen (gas).
Det är allt. Personligen gillade jag verkligen projektet, och som jag redan sa, planerar jag att upprepa det i fallet från fjärrkontrollen till en leksaksbarn. I menyn kan du välja läget från linjärt till exponentiellt och finjustera värdet på varje pinne. Tänk på att medelvärdet för varje kanal bör vara 127.
Du kan ladda ner allt du behöver här.
All framgång i arbetet!