Under sin utbildning spelade författaren spel med accelerometerstöd på sin telefon. Han gillade verkligen att köra en bil i telefonen helt enkelt genom att luta, och sedan började han drömma om att göra en bil med samma kontroll i verkliga livet. Nu har Arduino och efter att ha förvärvat programmeringsfärdigheter är det dags att skapa en hanterad maskin på Android, han kallade det Hercules.
Hon fick det här namnet på grund av det enorma vridmomentet och den höga hastigheten. modell kan styras med en Android-telefon via Bluetooth. Alla telefoner med detta operativsystem är lämpliga för kontroll, författaren begränsar inte en fjärrkontroll. Att spara pengar med att använda telefonen, eftersom jag inte behövde spendera pengar på att skapa en fjärrkontroll.
Material och verktyg:
- Arduino Uno
- Bluetooth-sändare
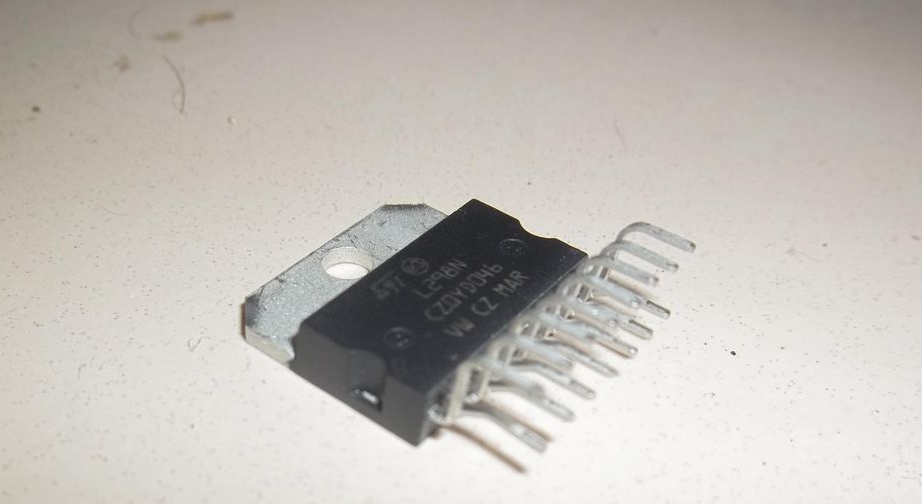
- Förare med två motorer (med L298 H-bridge)
- Motorer med växlar 4 st (ström väljs beroende på maskinens användning)
- Hjul 4 st
- Batteri 1Ah SLA 12V
- Bas för komponenter (chassi)
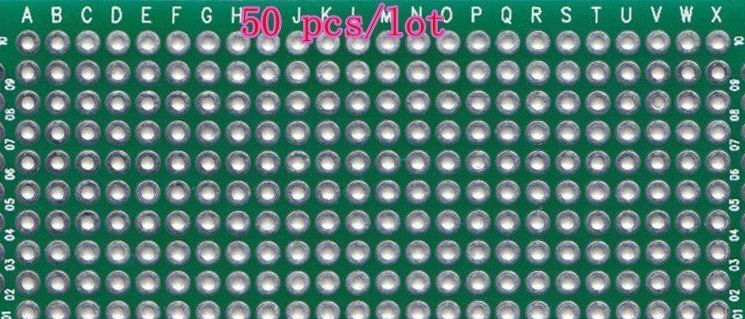
- brödskiva
- Lådor för bostad 4 st
- SPST-omkopplare
- Anslutningstrådar för Arduino
- Lödtrådar
- Muttrar och skruvar i liten storlek
- Motstånd 10 kOhm 1 st
- Motstånd 20 kOhm 1 st
- Android-telefon
- lödkolv
- lödning
- lödpasta
- borr





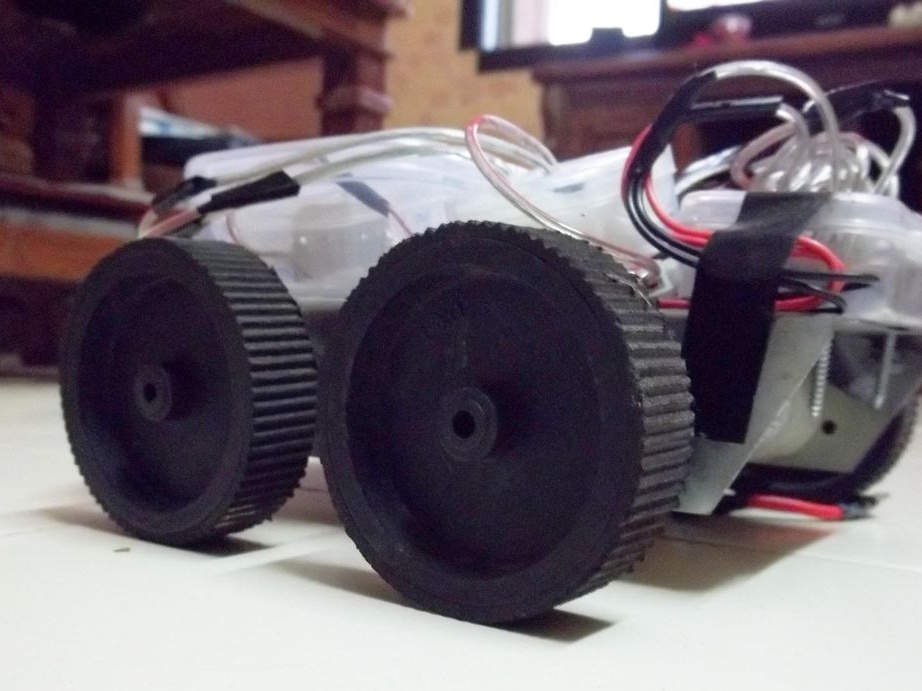
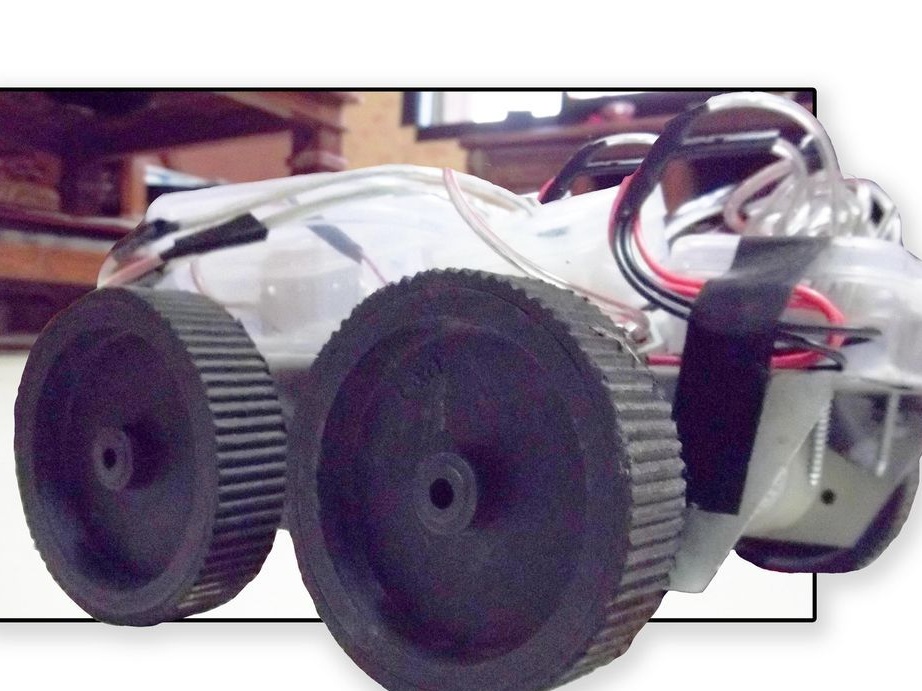
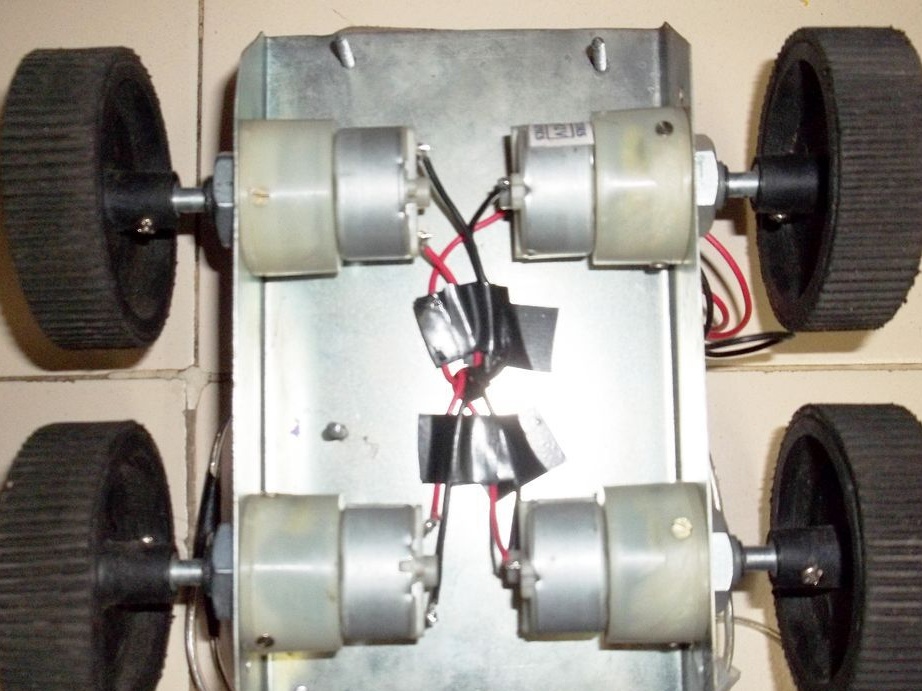
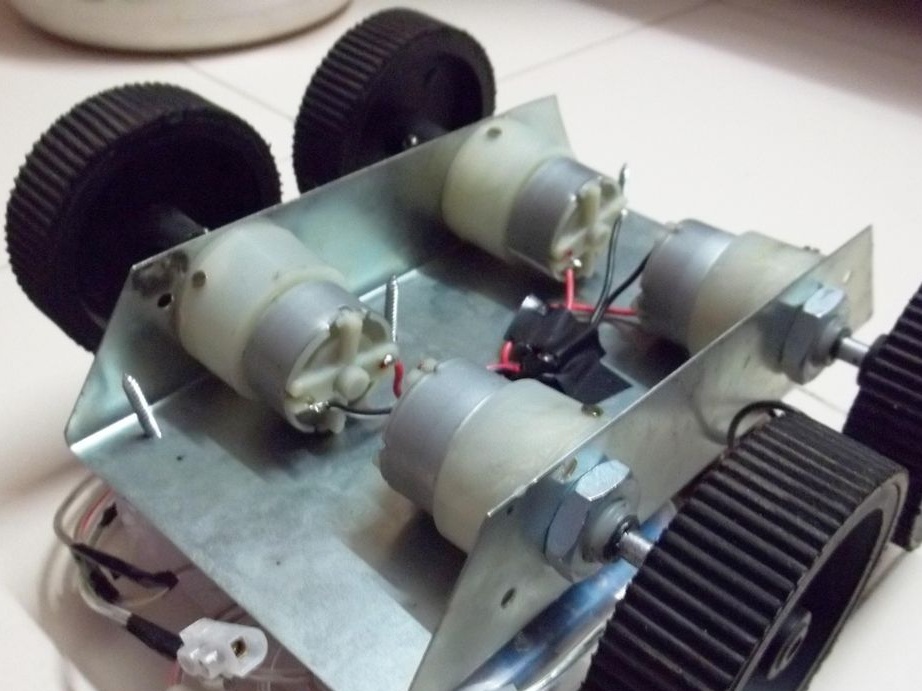
Första steget. Hjul och chassi.
Motorns skruvar gjorde det enkelt att installera dem på chassit med muttrar. Hjulen är installerade hela vägen till motoraxeln. Två högra motorer slås på parallellt med varandra, liksom två vänster. Hur chassiet ser ut efter att ha installerat fyra hjul och motorer kan ses på bilden nedan.
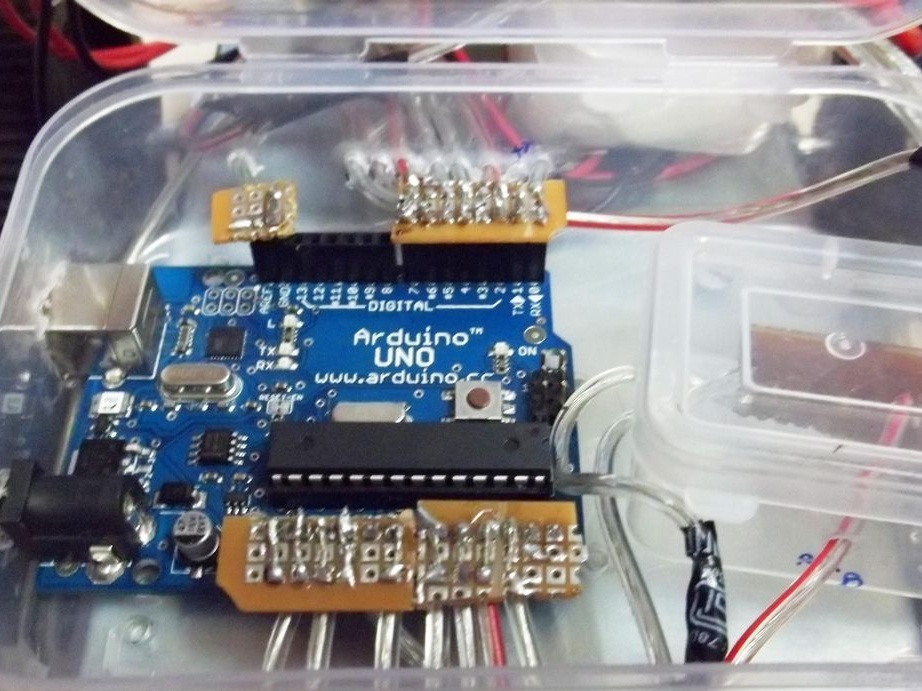
Steg två Bostäder för Arduino.
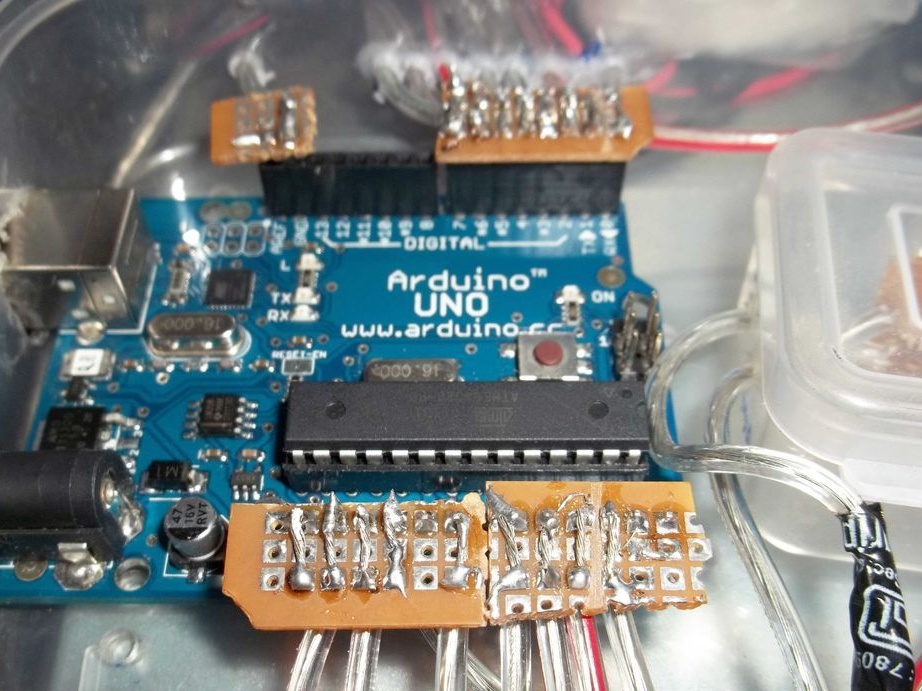
Falldiagrammet för Arduino är uppdelat i flera delar. En sådan modulär designlösning hjälper i framtiden att stödja kretsen eller eliminera ett eventuellt fel. Om en av komponenterna går sönder eller bränner ut, kan den bytas ut snabbt utan att bryta konstruktionen. Rutan för Arduino skapades enligt följande:
- Fyra delar skärs från brädskivan, två av dem med hål i storlek 8x3, de andra två delarna 6x3.
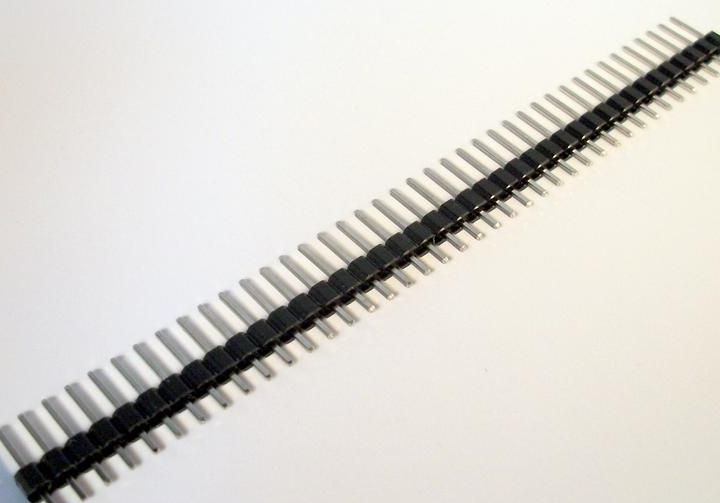
- BLS-stift löddes till varje kort på långsidan.
- Varje stift på brädskivan löddes dessutom med trådar som var cirka 10 cm långa. Detta gjordes så att ledningarna inte skulle komma från Arduino, för nu började belastningen fördelas jämnt.
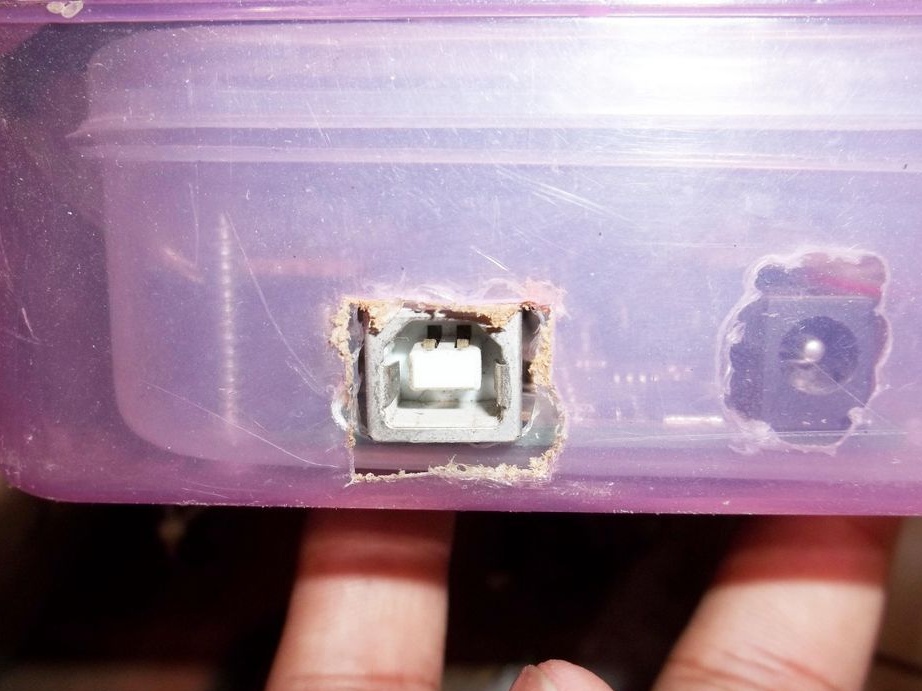
- Därefter placerades Arduino-kortet i fodralet så att USB-utgången rörde väggen. Ett hål klipptes ut för denna utgång, detta hjälper till att ladda ytterligare program i maskinen eller göra korrigeringar av befintliga. På lådans sidor klipptes hål för ledningarna som skulle gå från brädet. Ytterligare hål klipptes ut längst ner på lådan, under Arduino-monteringsanslutningarna.


Steg tre Bluetooth-sändare.
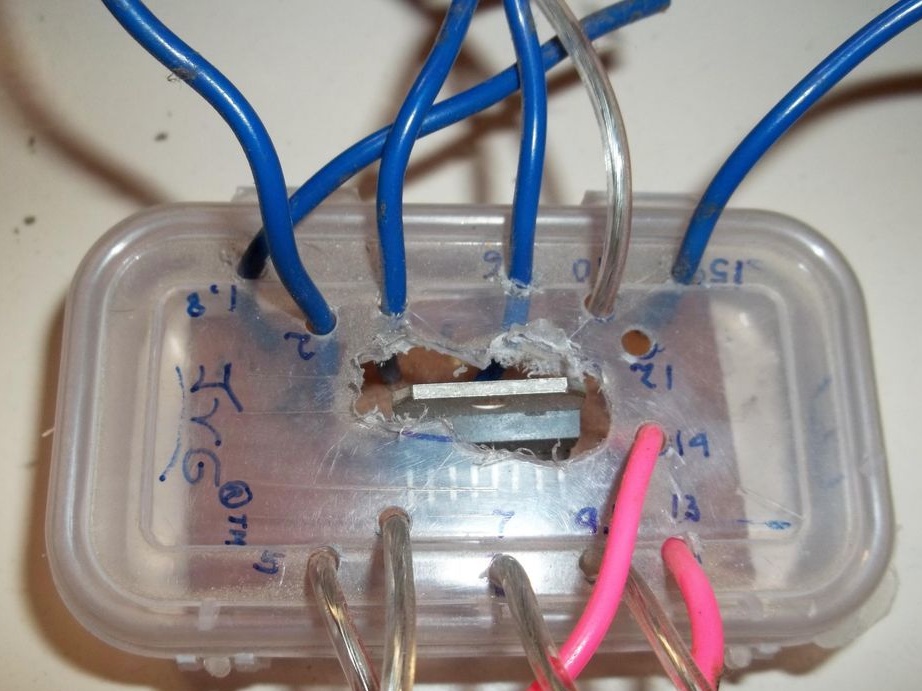
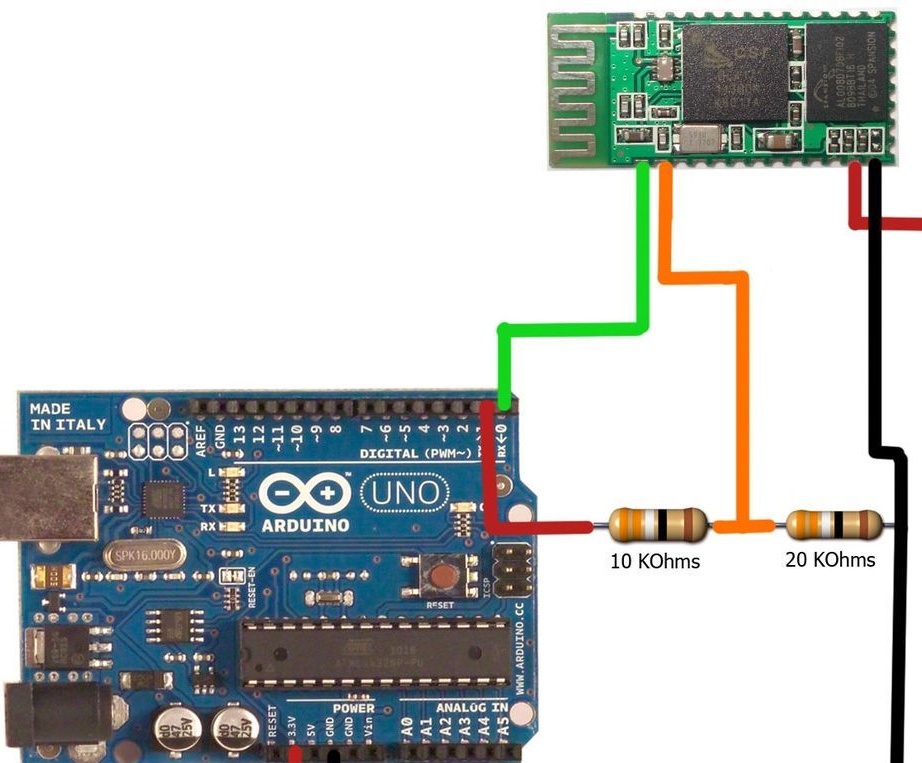
Lödtrådar till en Bluetooth-sändare är den svåraste uppgiften att montera detta projekt, författaren saknade verkligen en tredje hand när lödning. Fyra ledare 10 cm långa användes, de löddes till stift 1 (Tx), 2 (Rx), 12 (+ 3,3B) och 13 (GND). Nu kan sändtagaren placeras i ett hölje med förberedda hål för trådarna. Författaren limmade ledningarna på lådan för att förhindra att trådarna rivs av kontakterna.



Det fjärde steget. Hus för motstånd.
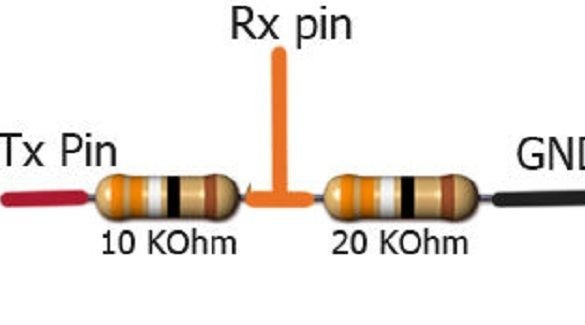
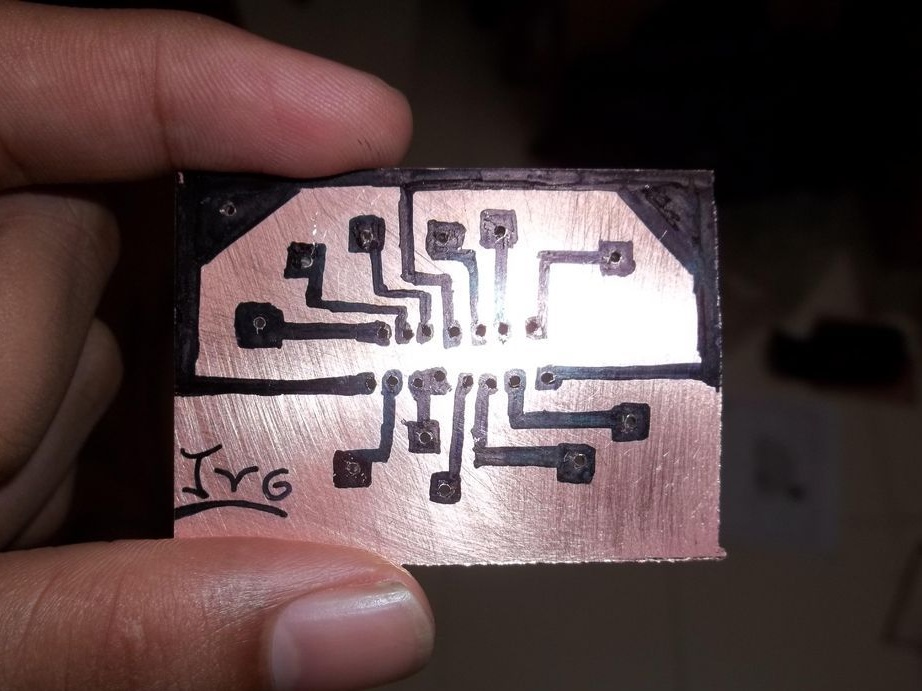
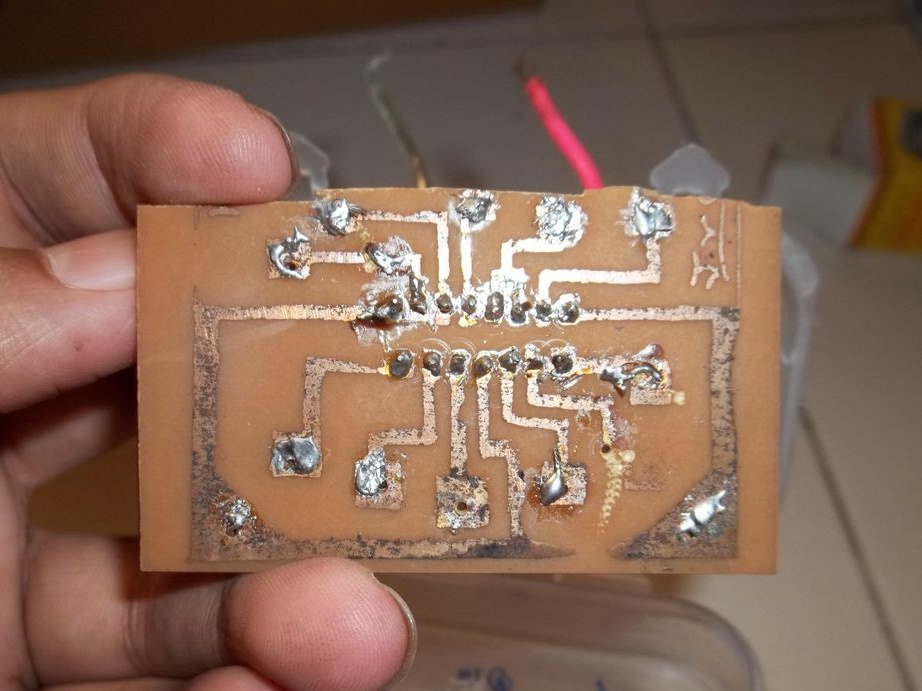
Eftersom Arduino Tx-utgången skickar en signal med en spänning på 5V, och Bluetooth-modulen fungerar med en spänning på 3,3V, var det nödvändigt att konvertera 5V till 3,3V. För denna uppgift använde författaren en spänningsdelare. Enligt kretsen som anges nedan lödde han ett motstånd mot den återstående biten av brödskivan. Naturligtvis var det möjligt att lägga denna krets i ett Arduino-fall, men det fanns inte tillräckligt med utrymme, så författaren gjorde en separat för motståndarna.


Steg fem Motordrivrutin.
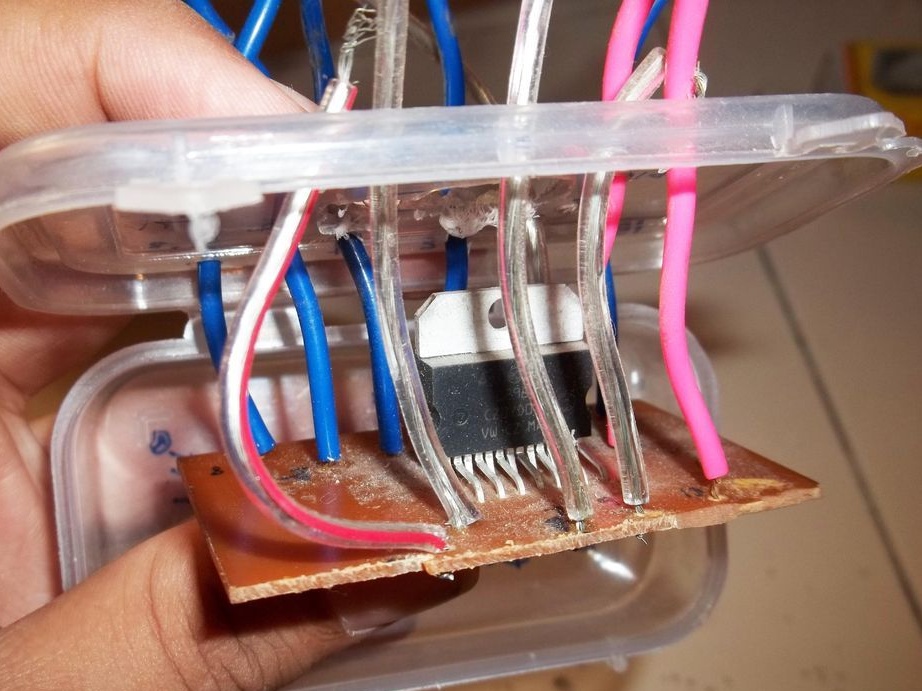
Författaren använder en dubbel förare med en H-bridge L298 IC, han styr fyra motorer. För honom skapade författaren ett bräde för att underlätta lödningstrådar till honom, själva brädet på bilden nedan. Efter lödningen placerades föraren också i ett separat hölje med hål för trådarna.
Steg sex Slutmonteringen.
Varje enskild komponent är ansluten till Arduino i enlighet med schemat.
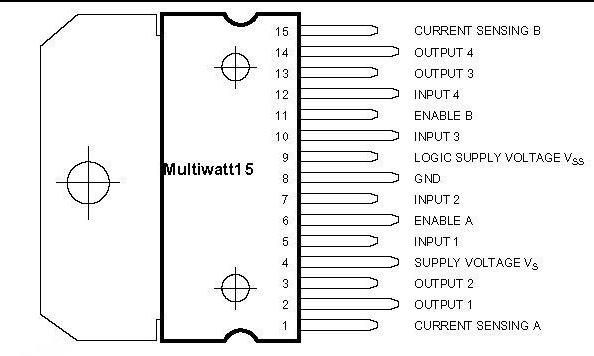
Anslutningen av motordrivaren till Arduino ägde rum enligt denna stift:
1 till GND
2 till den första kontakten på vänster motor
3 till vänstermotorns andra kontakt
4 till ett 12V batteri
5 för att fästa Arduino 2
6 till stiftet Arduino 3
7 för att fästa Arduino 4
8 till GND
9 till 5V med Arduino
10 för att fästa Arduino 5
11 för att fästa Arduino 6
12 till stiftet Arduino 7
13 till den första kontakten med höger motor
14 till den andra kontakten med höger motor
15 till GND
12V ström anslöts till Vin Arduino-stiftet och stift 4 på L298. GND Arduino respektive till GND strömförsörjning.
Sjunde steget. Program för Arduino.
För att programmet skulle fungera korrekt var det nödvändigt att installera Amarino-biblioteket, som kan laddas ner. Du kan ladda ner källkoden för Arduino under artikeln.
Steg åtta. Programvara för Android
Amarino Library är en verktygssats för att arbeta med Android-smartphones. Genom att installera ett extra program på din telefon kan du börja skriva ett program.
Amarino-app och plugin kan laddas ner från. Efter att ha installerat dem på telefonen återstod det bara att slå på maskinen och ansluta till den och välja avsnittet Lägg till händelser-> Accelerometer-sensor.
Video med installation av Amarino och dess plugins:
Maskinens hastighet är lika med lutningen på telefonen. Om maskinen rör sig i fel riktning måste du byta ledningarna från motorerna.